
Bridging the Gap between Real and Synthetic Traffic Sign Repositories
Diogo Lopes da Silva
1
and Ant
´
onio Ramires Fernandes
2 a
1
Universidade do Minho, Braga, Portugal
2
Algoritmi Centre/Department of Informatics, Universidade do Minho, Braga, Portugal
Keywords:
Synthetic Training Sets, Traffic Sign Classification Repositories, Convolutional Neural Networks.
Abstract:
Current traffic sign image repositories for classification purposes suffer from scarcity of samples due to the
compiling and labelling images being mainly a manual process. Thus, researchers resort to alternative ap-
proaches to deal with this issue, such as increasing the model architectural complexity or performing data
augmentation. A third approach is the usage of synthetic data. This work addresses the data shortage issue by
building a synthetic repository proposing a pipeline to build synthetic samples introducing previously unused
image operators. Three use cases for synthetic data usage are explored: as a standalone training set, merging
with real data, and ensembling. The first option provides results that not only clearly surpass any previous
attempt on using synthetic data for traffic sign recognition but are also encouragingly placing the obtained ac-
curacies closer to results with real images. Merging real and synthetic data in a single data set further improves
those results. Due to the different nature of the datasets involved, ensembling provides a boost in accuracy
results. Overall we got results in three different datasets that surpass previous state of the art results: GTSRB
(99.85%), BTSC (99.76%), and rMASTIF (99.84%). Finally, cross testing amongst the three datasets hints
that our synthetic datasets have the potential to provide better generalization ability than using real data.
1 INTRODUCTION
Typically, training deep learning models requires a
high volume of samples. In the context of traffic sign
recognition, collecting a truly representative dataset
is both a time and resource consuming task. For in-
stance, some traffic signs appear only in highways
while others appear only in rural areas. Furthermore,
these signs should be captured in a wide range of
lighting and weather conditions, as well as using dif-
ferent camera sensors. When all factors are taken into
account, the process of building a truly representative
dataset of real-world images is not to be taken lightly.
To aggravate things further, it must be taken into
account that a model trained with traffic signs from
a specific country will not be optimal when used in
a different country. Small differences in letter fonts
and pictograms are sufficient to significantly decrease
the accuracy of a model. This issue can also be found
within each country, where pictograms used in traf-
fic signs are sometimes updated or have their font
changed.
Some works address the accuracy problem from
the model architecture perspective. Complex ar-
a
https://orcid.org/0000-0002-3680-572X
chitectures, namely Spatial Transformer Networks
(STN), Inception modules, and Generative Adversar-
ial Networks (GAN), have been able to achieve con-
siderable accuracies.
The purpose of this work is to address the issues
pertaining to the datasets. We explore the construc-
tion of a dataset based only on synthetic data, thereby
eliminating the data gathering and labelling issues, re-
moving the limitation on the number of classes, and
issues with multiple variations of the same sign.
The only input we require to build a synthetic
dataset is a set of templates that represent the traffic
sign classes to be included. Most of these can be col-
lected from a number of sources on the internet. Note
that for a particular class there may be more than one
template to accommodate older versions of a sign, or
slight variations found by different sign makers.
If real-world data is available, synthetic data can
be used to complement the training set, providing a
hard to obtain diversity when considering only real
samples, thereby potentially increasing the overall
classification accuracy.
To evaluate the potential of such datasets, tests
were performed against state-of-the-art reports on
three European traffic sign repositories, considering
44
Lopes da Silva, D. and Fernandes, A.
Bridging the Gap between Real and Synthetic Traffic Sign Repositories.
DOI: 10.5220/0011301100003277
In Proceedings of the 3rd International Conference on Deep Learning Theory and Applications (DeLTA 2022), pages 44-54
ISBN: 978-989-758-584-5; ISSN: 2184-9277
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Table 1: Statistics for the German, Belgian, and Croatian
datasets.
GTSRB BTSC rMASTIF
class # 43 62 31
train # 39209 4575 4044
test # 12630 2520 1784
min res 25x25 22x21 17x16
max res 232x266 674x527 185x159
three usage scenarios: the synthetic dataset as a stan-
dalone training set, merged with a real training set,
and having synthetic and real data participating in
an ensemble. To assess the generalisation ability
of the trained models with synthetic data, we also
performed cross-testing with synthetic data amongst
three datasets.
2 RELATED WORK
This section focuses on the European traffic sign
repositories used in this work, the research litera-
ture using deep learning models trained with these
datasets, and on research relating to synthetic traffic
sign datasets.
2.1 Traffic Sign Datasets
Only for a few countries have traffic sign samples
been collected, labelled, and released as a public
dataset. The volume and quality of samples varies
greatly across countries.
Here we focus on three European datasets: GT-
SRB
1
(Stallkamp et al., 2012); BTSC
2
dataset (Timo-
fte et al., 2009); and rMASTIF
3
dataset (
ˇ
Segvic et al.,
2010).
Table 1 presents some statistics for these datasets.
2.2 Traffic Sign Classification
In 2011, Cires¸an et al. (Cires¸an et al., 2012) won
the IJCNN competition with an ensemble of 25
CNNs. The dataset was preprocessed using 4 differ-
ent colour/brightness equalisation settings, providing
a total of 5 different datasets (including the original).
Each dataset version was used to train 5 models, re-
sulting in 25 trained CNNs. They achieved an accu-
racy of 99.46% in the GTSRB dataset.
In 2015, Haloi (Haloi, 2015) achieved an accuracy
of 99.81% on the GTSRB dataset using a CNN con-
sisting in sequential STN layers along with a modified
1
http://benchmark.ini.rub.de/
2
https://btsd.ethz.ch/shareddata/
3
http://www.zemris.fer.hr/ kalfa/Datasets/rMASTIF/
version of GoogLeNet, based on an Inception archi-
tecture (Szegedy et al., 2014).
Juri
ˇ
si
´
c et al. (Juri
ˇ
si
´
c et al., 2015) reports an ac-
curacy of 98.17 ± 0.22% on the BTSC dataset and
99.53± 0.10% on the MASTIFF dataset. Their model
was based on the one used by Cires¸an et al.(Cires¸an
et al., 2012), and included width branches (also
named scales) of convolutional layers in order to cre-
ate a multi-scale architecture in a similar approach to
the work of (Sermanet and LeCun, 2011).
Later, Arcos-Garc
´
ıa et al. (Arcos-Garc
´
ıa et al.,
2018) accomplished a performance of 99.71% on the
GTSRB dataset and 98.95% on the BTSC dataset.
Their architecture consists in a single CNN that com-
bines convolutional layers and 3 STN modules.
In 2018, the performance on the BTSC was im-
proved by Saha et al. (Saha et al., 2018) achieving an
accuracy of 99.17%. The result was achieved through
the application of a CNN with dilated convolutions
(Yu and Koltun, 2016). A similar result was obtained
by Jain et al. (Jain et al., 2019), with an accuracy of
99.16%. This later approach uses Genetic Algorithms
to discover the best training parameters.
In (Mahmoud and Guo, 2019) the authors start by
training a DCGAN to extract deep features. Then a
MLP classifier is used, taking as input the output of
the last convolutional layer of the trained DCGAN.
The MLP is trained with a pseudoinverse learning au-
toencoder (PILAE) algorithm. Their results are very
close to (Haloi, 2015) for GTSRB (99.80%), and set a
new state of the art result for BTSC with an accuracy
of 99.71%.
2.3 Synthetic Traffic Signs
In 2018, Stergiou et al.(Stergiou et al., 2018) proposed
the use of synthetic training data based on traffic sign
templates. Distinct templates were processed, result-
ing in 50 classes of British traffic signs. Backgrounds
were taken from 1000 samples of British roads in
several scenarios. Half of the backgrounds are ex-
amples of urban areas and roads, the other half be-
ing from rural environments. The synthesised traffic
signs are created to simulate different lighting condi-
tions with the intent of closely simulating real-world
scenarios. Regarding geometric transformations, 20
distinct affine transformations for shearing were ap-
plied alongside rotations, scaling, and translations.
The final dataset was constructed with 4 brightness
variations. Evaluating their approach with a single
CNN with 6 convolutional layers with zero padding
achieved a peak accuracy of 92.20%. However, they
do not mention the test dataset used for evaluation nor
the test conditions.
Bridging the Gap between Real and Synthetic Traffic Sign Repositories
45

Lou et al. (Luo et al., 2018) present an approach
with Generative Adversarial Networks (GAN), claim-
ing to generate more realistic images than conven-
tional image synthesis methods. The main purpose
in using GANs is to take advantage of the fact that the
GAN itself will learn the generation parameters from
real data instead of having to manually define the data
transformations to apply. However, this approach re-
quires existing real data to train the GAN.
As input, the algorithm receives a sign template,
an affine transformation, and a background. The
GAN synthesises the visual appearance of the merg-
ing the background and the traffic sign, while the ge-
ometric transformations are applied independently as
in previous methods. The generated dataset was then
tested with a CNN classifier with a STN layer, reach-
ing an accuracy of 97.24% in the GTSRB test set
when using only synthetic data. Note that this accu-
racy is not for the whole GTSRB test set, as the dia-
mond shaped sign (priority road) was excluded from
the evaluation.
In order to evaluate the synthetic dataset, a com-
parison was performed using the same CNN classifier
trained with real data. The accuracy achieved with
this classifier on the same test set was 99.21%. Fur-
ther tests were performed to show the benefits of com-
bining real and synthetic data. These later tests show
that there is a significant improvement when merging
these two sources of images, even when considering
just a percentage of the real data available. The best
result reported is with a dataset merging 50% of the
real data with the synthetic training set, achieving an
accuracy of 99.41%.
Spata et al. (Spata et al., 2019) extend Lou et al.
proposal with the background being generated by a
GAN. First a randomised perspective transformation
is applied to the sign template. As the authors state,
”the CycleGAN is designed primarily for stylistic and
textural translations and therefore cannot effectively
contribute such information itself”. The authors re-
port that using real-world data results in better and
more stable classifiers. The best reported result with
synthetic datasets is 95.15% of accuracy.
Horn and Houben (Horn and Houben, 2020) fur-
ther explore the generation of synthetic data, improv-
ing the results from Spata et al., however, results are
only provided for selected classes.
Araar et al (Araar et al., 2020) extend the approach
by Stergiou et al., applying geometric transformations
and image processing techniques. Tested on GTSRB,
an accuracy of 97.83% is reported.
Liu et al. (Liu et al., 2021) explore the generation
of synthetic data using a DCGAN trained on real data.
Their work shows that it is possible to create images
Figure 1: Sample templates for the GTSRB.
with a high degree of similarity based on the SSIM
metric.
A relevant note is that, apart from Araar et al., all
other works strived to generate synthetic samples as
close to real samples as possible.
3 SYNTHETIC TRAFFIC SIGNS
GENERATION ALGORITHM
A synthetic traffic sign can be considered as the com-
position of a background with a foreground template
that undergoes a set of operations in order to mould
the raw templates to synthetic traffic sign samples.
The traffic sign synthesising algorithm consists in a
pipeline of geometric transformations, colour trans-
formations, and image disturbances in the form of
noise and blur.
Foregrounds are templates representing all classes
of the original traffic sign repositories. To build these
sets of templates we examined the real data training
set to gather the templates for each class. A sample of
the gathered templates for GTSRB is shown in Fig-
ure 1. Some classes have multiple templates due to
the presence of older versions of a sign (see templates
for 30km/h speed limit), or even some differences
to manufacturing (see templates for 120km/h speed
limit). This is common, but not exclusive to speed
limit classes. Some templates are rotated to accom-
modate real scenario placement (see templates for the
roundabout sign).
A relevant issue is present in the rMASTIFF
dataset where two signs share the same central pic-
togram, yet they belong to different classes. The main
difference between these signs is the colour of the
outer area of the sign, causing a number of inter-class
misclassifications. To deal with this issue we created
multiple templates for each class varying the hue and
luminance channels, see Figure 2. This approach sub-
stantially reduces the number of misclassified sam-
ples from both classes.
As in previous works, we apply geometric trans-
formations to create a large diversity of images,
namely resizing, translation, rotation, and perspective
transforms. Commonly to previous works, we also
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
46

Figure 2: Templates for classes with same central pictogram
(rMASTIFF).
Figure 3: Synthetic template transformation pipeline.
jitter hue and saturation.
In this section, we will focus on the new operators
and significant variants, namely the background se-
lection, brightness distribution, Perlin noise, and con-
fetti noise.
Figure 3 shows the full pipeline for the generation
of synthetic samples. The value on the side of each
box indicates the probability of applying the respec-
tive transformation to a sample. The left branch gen-
erates the smaller samples, whereas the right branch
is designed for the larger samples.
Figure 4: Samples of generated synthetic traffic signs with
solid colour backgrounds for each class of the GTSRB
dataset.
Figure 5: Real vs. solid color backgrounds.
Samples of the end result, considering solid colour
backgrounds, are shown in Figure 4. Note that, un-
like prior works, we did not aim to get photo-realistic
samples
4
.
3.1 Background
The usage of real scenario backgrounds in synthetic
samples can be found in all the works discussed in
Section 2. Signless images of street scenarios from
Google Street Views were used as real backgrounds.
As depicted in Figure 5, for our synthetic data gen-
eration we further tested an alternative: random solid
colour per sample.
While real backgrounds provide more realistic im-
agery they may introduce a bias in the training set.
It can be challenging to find a suitable set of back-
grounds covering different scenarios (urban and ru-
ral), weather conditions, and lighting variations due
to time of day or even seasons.
Random solid colour backgrounds, on the other
hand, are easier to use, and ”force” the network to
focus on the traffic sign since there are no features
outside of the traffic sign. This approach has been
tested previously in (Araar et al., 2020), but Araar et
al. discarded this option due to poor results.
In here, we explore both real ans solid colour
backgrounds.
3.2 Brightness Distribution
Real image data can be modelled by statistical data
distributions for some of its parameters. Brightness is
an example explored in this work. When real data is
available, it becomes possible to compute brightness
for synthetic samples based on the real data brightness
distribution.
To determine which distribution best fits
the real dataset brightness distribution, the Kol-
mogorov–Smirnov test (K-S test) was performed.
Running the K-S test on all available samples from
the three datasets, we found that the Johnson dis-
tribution with bounded values was able to closely
fit the real sample data. The histogram plot of the
distribution for the GTSRB dataset is depicted in
4
source code for the generation of synthetic datasets
available at https://github.com/Nau3D/bridging-the-gap-
between-real-and-synthetic-traffic-sign-datasets
Bridging the Gap between Real and Synthetic Traffic Sign Repositories
47
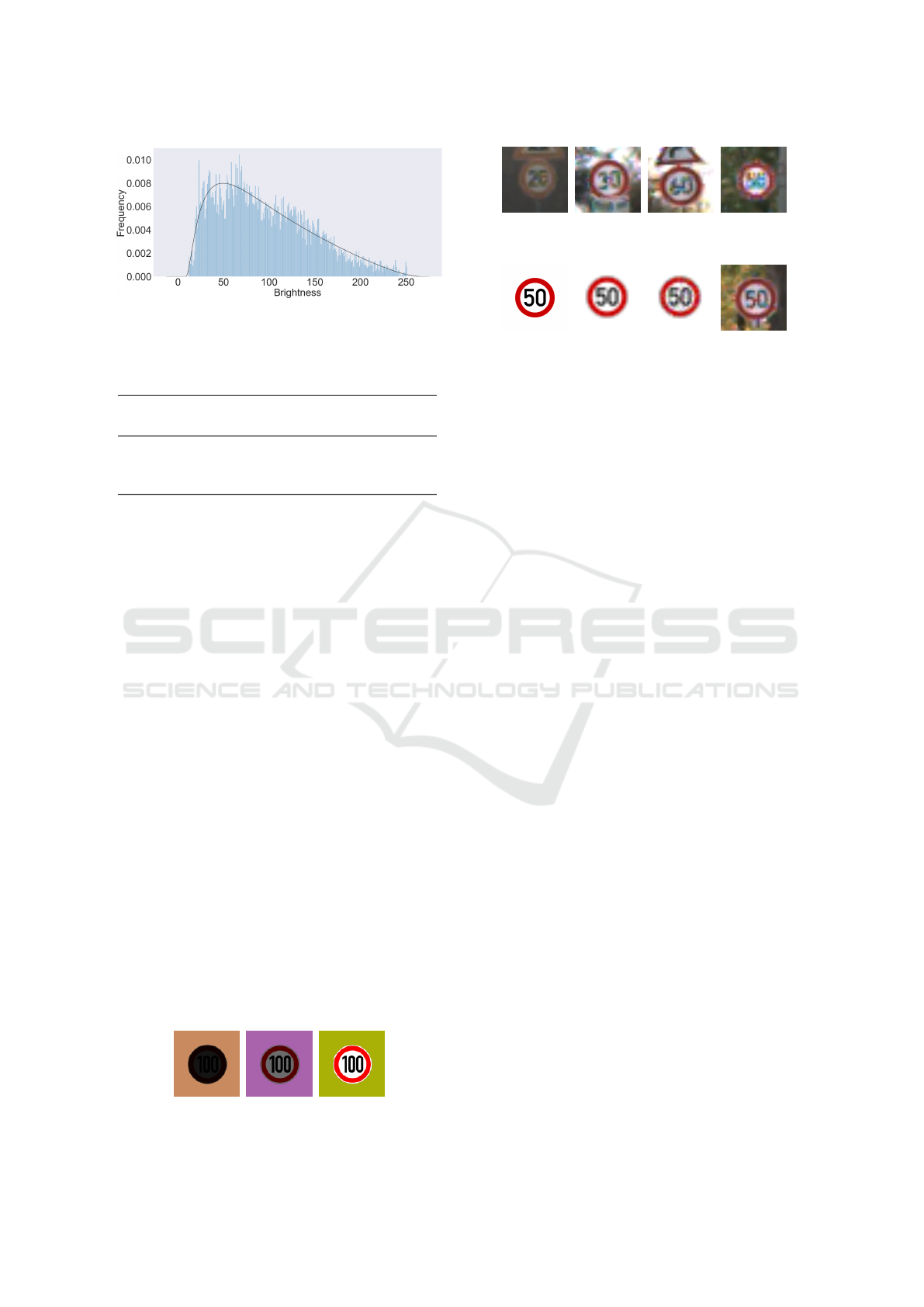
Figure 6: Brightness frequency for the GTSRB. The curve
represents the Johnson fitted distribution.
Table 2: Fitted Johnson brightness distribution parameters
for the German, Belgian, and Croatian datasets.
Parameter
dataset γ δ ξ λ
GTSRB 0.747 0.907 7.099 259.904
BTSC 0.727 1.694 2.893 298.639
rMASTIF 0.664 1.194 20.527 248.357
Figure 6. The parameters of the distributions for the
three datasets are shown in Table 2.
To test the potential benefit of using this infor-
mation, the samples of the synthetic dataset were ad-
justed to the Johnson distribution with the parameters
determined for the respective dataset. This step is in-
troduced in the final stages of the synthetic transfor-
mation pipeline. For each synthetic image, a sample
is taken from the Johnson distribution and the image
brightness is adjusted accordingly. Examples of the
end result can be seen in Figure 7.
Relying on information from existing real image
datasets requires an existing dataset of real images to
determine the parameters of the distribution. Further-
more, it only makes sense in a real world application
if the real dataset is truly representative of a multitude
of weather conditions and lighting variations. This is
not the case with the majority of the publicly available
datasets.
To create a synthetic dataset from scratch we pro-
pose the usage of exponential Equation 1, where the
desired brightness is computed considering a uniform
random variable u in [0,1], and a variable bias that de-
termines the minimum brightness. Brightness B can
be defined in the range [bias,255] as:
B = bias + u
γ
× (255 − bias) (1)
In our tests we set bias = 10, and γ = 2.
Figure 7: Brightness altered in synthetic samples of class 7
from GTSRB dataset.
Figure 8: Examples of noisy traffic sign samples of classes
0, 1, 2, and 3 from the GTSRB dataset, respectively.
Figure 9: Confetti noise. From the left: original tem-
plate, resized sample, resized template after applying con-
fetti noise, and sample from GTSRB.
To adjust the template brightness, the first step is
to compute the average V component in HSV repre-
sentation. A ratio between the mean V value and the
brightness obtained from Equation 1, or by sampling
the Johnson distribution, is computed and multiplied
by V for every pixel.
3.3 Confetti Noise
A large portion of the smaller samples on the real
datasets set have abrupt pictogram colour variations.
Some examples are presented in Figure 8.
Our approach to simulate this is based on impul-
sive noise. This noise, which we named Confetti
Noise, modifies the value of pixels in a random fash-
ion, being applied only to the smaller samples. The
process starts with a sliding window approach on the
template image of small solid colour rectangles which
are set to a random colour with a defined probability.
Finally, the template is resized to the desired resolu-
tion. The effect on a template and a comparison with
an actual traffic sign is depicted in Figure 9.
Confetti noise is applied to 50% of the smaller
samples and has 3 parameters. The kernel size ratio
(3% of the original template dimension), the proba-
bility of updating the window under the kernel (set at
3%), and the stride (set at 1.5% of the template di-
mensions).
3.4 Perlin Noise
Real samples are mostly heterogeneous due to uneven
light exposure, colour fade, or deterioration due to ex-
posure. In order to simulate these variations of colour
shade, Perlin noise (Perlin, 1985) was added to the
templates.
The process of applying Perlin noise to the tem-
plates consists first in random cropping of a large
noise texture, and alpha blending the crop with the
template (with α = 0.60). The Perlin noise param-
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
48

Figure 10: Perlin noise sample (left) applied to classes 1,
36, and 41 from the GTSRB dataset.
Table 3: Neural network model with a total of approxi-
mately 2.7 million trainable parameters.
Layer type Filters Size
Convolution + LeakyReLU 100 5 × 5
Batch Norm.
Dropout (p = 0.05)
Convolution + LeakyReLU 150 5 × 5
Max Pooling 2 × 2
Batch Norm.
Dropout (p = 0.05)
Convolution + LeakyReLU 250 5 × 5
Max Pooling 2 × 2
Batch Norm.
Dropout (p = 0.05)
Fully Connected + ReLU 350
Fully Connected + ReLU # classes (c)
eters are as follows: 6 octaves, a persistence of 0.5,
and a lacunarity of 2.0. Figure 10 shows examples of
Perlin noise applied to different templates.
Although it seems as if we are over emphasising
the noise effect, models trained with lower values of
α did not prove as accurate when evaluated on the test
sets.
4 EVALUATION
For this work we opted for a plain vanilla CNN since
we want to focus on the data and not on the model.
A summary of the CNN architecture employed in this
work can be seen in Table 3. The number of outputs is
set according to the number of classes of the dataset.
This model consists of three convolution blocks with
a kernel size of 5 × 5 pixels and one fully connected
layer. The activation function used in all convolu-
tional layers is LeakyReLU, while the fully connected
layer uses ReLU. Batch size is set to 64, and the Adam
optimizer is used with a learning rate of 0.0001.
We performed tests on three of the datasets pre-
sented in Section 2.1, namely GTSRB, BTSC, and
rMASTIF. All values reported are averages of 5 runs,
each with 40 epochs.
Real data training sets were augmented before
training, so that each class contains at least 2000 sam-
ples, with translations (up to four pixels in each di-
rection), rotations (−10
◦
to 10
◦
), and vertical flips,
including those changing the target class, where ap-
Table 4: Accuracy results when training with real data.
Number of parameters is 10
6
. (1) (Mahmoud and Guo,
2019), (2) (Haloi, 2015), (3) (Saha et al., 2018), (4) (Juri
ˇ
si
´
c
et al., 2015).
Model Input Params Acc (%)
GTSRB
Ours 32 × 32 2.7 99.64 ± 0.02
(1) 64 × 64 − 99.80
(2) 128 × 128 10.5 99.81
BTSC
(3) 56 × 56 6.3 99.17
Ours 32 × 32 2.7 99.30 ± 0.03
(1) 64 × 64 − 99.72
rMASTIF
(4) 48 × 48 6.3 99.53
Ours 32 × 32 2.7 99.71 ± 0.05
plicable.
Dynamic data augmentation in form of geometric
transformations and colour jittering is applied to the
dataset during training, consisting of: small rotations
with a maximum of 5
◦
in each direction; shear in the
range of [−2,2] pixels followed by rotations; transla-
tions in a range of [−0.1,0.1] percent, also followed
by rotations; and centre cropping of 28 × 28 pixels.
The colour transformation consists in jittering of the
brightness, saturation, contrast, each multiplied by a
random value in the range of [0,3], and hue jittered in
the range [−0.4,0.4]. These transformations are ap-
plied independently, meaning that, for each sample in
the original dataset, the model sees eight variations of
that sample in the same epoch.
Accuracy results for real data are reported in Table
4, including state-of-the-art results, to put in context
the results obtained with synthetic data presented in
the following subsections. Our results are an average
of 5 runs per dataset.
4.1 Synthetic Datasets
Synthetic datasets have 2000 samples per class. Dy-
namic data augmentation is identical to the applied
for real data datasets. We evaluated models trained
with synthetic data where brightness is set according
to the exponential equation (Equation 1), synthetic
data with brightness information from the respective
Johnson distribution, as well as considering real and
solid colour backgrounds for synthetic samples.
To identify the datasets, we will use R for real data
datasets. Synthetic datasets are identified by a three
letter abbreviation, always starting with an S for syn-
thetic. The second letter relates to brightness and the
Bridging the Gap between Real and Synthetic Traffic Sign Repositories
49
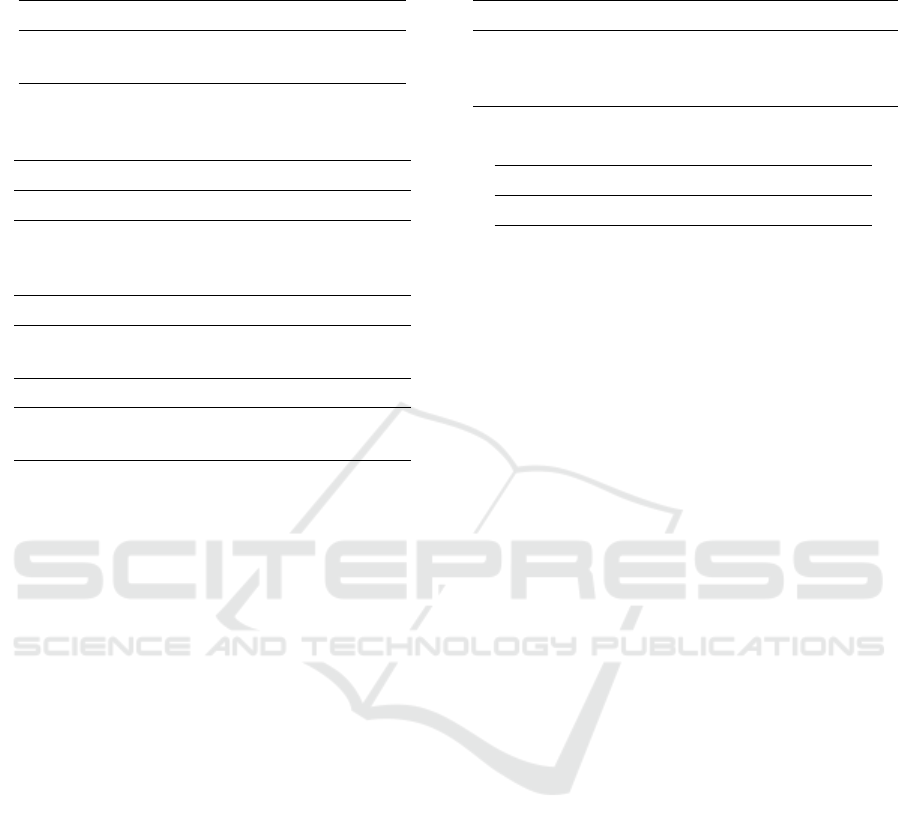
Table 5: Results on GTSRB for synthetic datasets built with
and without Perlin and confetti noise.
Accuracy %
Base 97.75 ± 0.01
With Perlin and confetti noise 99.25 ± 0.06
Table 6: Test dataset accuracy for models trained with syn-
thetic data.
Real Bg. Solid Bg.
GTSRB (real data = 99.64)
Luo et al. 97.25 (real data = 99.20)
SE 99.32 ± 0.25 99.25 ± 0.06
SJ 99.41 ± 0.05 99.39 ± 0.08
BTSC (real data = 99.30)
SE 98.86 ± 0.12 99.12 ± 0.04
SJ 98.92 ± 0.09 99.11 ± 0.09
rMASTIF (real data = 99.71)
SE 99.27 ± 0.14 99.47 ± 0.09
SJ 99.37 ± 0.08 99.26 ± 0.17
third to the background. These datasets are referred
to as:
• SES - Exponential brightness and Solid bgs;
• SJS - Johnson brightness dist. and Solid bgs;
• SER Exponential brightness and Real bgs;
• SJR - Johnson brightness dist. and Real bgs;
For each combination we created five datasets
varying the random seed.
Table 5 reports on the evaluation of introduc-
ing Perlin and Confetti Noise, considering the SES
datasets built with and without Perlin and confetti
noise. Results clearly show a very significant im-
provement when adding these two transformations.
Most of the gains are due to Perlin Noise since the
Confetti Noise is only applied to the smaller samples.
All further synthetic datasets are generated with these
transforms.
Results for a direct accuracy comparison between
real and synthetic data can be found in Table 6 to-
gether with the best result reported in (Luo et al.,
2018) with synthetic data. These results show that all
models trained with synthetic data are within less than
0.5% of the accuracy obtained with real data. This
represents a clear step in bridging the gap between
real and synthetic data.
Regarding the brightness option, the exponential
equation proved superior in the BTSC and rMASTIF
datasets. Results in GTSRB could potentially be jus-
tified by the fact that the brightness distribution curve
in this dataset is narrower than in the other datasets.
Table 7: Average accuracy results for merged datasets. (1)
- Lou et al., (2) - Real + SES, (3) - Real + SJS.
GTSRB BTSC rMASTIF
(1) 99.41
(2) 99.70 ± 0.04 99.36 ± 0.05 99.81 ± 0.04
(3) 99.75 ± 0.02 99.40 ± 0.05 99.84 ± 0.07
Table 8: Average accuracy results for ensembles.
GTSRB BTSC rMASTIF
99.82 ± 0.02 99.38 ± 0.02 99.79 ± 0.05
Considering the backgrounds, for both BTSC and
rMASTIF we got better results with solid back-
grounds, as opposed to Araar et al.(Araar et al., 2020)
where this option was discarded due to poor results.
Again, the GTSRB dataset behaves differently. This
may be due to a bias in our real imagery for back-
ground, being closer to the backgrounds in GTSRB.
This issue requires further study in order to get a more
definitive answer.
4.2 Merge Real and Synthetic Data
This test consists of merging the synthetic and real
datasets into a single dataset. We considered the solid
background synthetic datasets with both brightness
options. Based on the previously built datasets, we
created 5 merged datasets for each brightness option.
Results in Table 7 shows a slight advantage when
using brightness information from the real dataset.
4.3 Ensembles
Since we have a number of models trained with dif-
ferent datasets it makes sense to consider ensembling
them. Our approach is to consider one of the synthetic
models, the real data model, and a merged model.
Since the merged models include synthetic data
with solid colour backgrounds, we shall pick a syn-
thetic model with real backgrounds. To achieve a
more diverse set we are going to include the SER
model, which is less training set dependent than SJR
models, as the latter includes brightness information
from the training set. Hence our ensemble has only
three models, with one model of each category, i.e.,
SER, Real, and Merged (Real + SJS). This provides a
diverse ensemble with brightness computed both from
the exponential equation and Johnson distribution, as
well as real and solid colour backgrounds.
We evaluated the ensemble 5 times, each picking a
different combination of models. In practice we select
the i
th
model of each type to build the i
th
ensembles.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
50
Ensembles build with only 3 networks provide
worse results than single merged models for both
BTSC and rMASTIFF. The BTSC result was to be
expected as there is a significant set of images mis-
classified by most models. In rMASTIF we found a
similar situation to a lower degree.
When considering GTRSB, the result is above the
state of the art (99.81% from Haloi (Haloi, 2015)).
Although we’re comparing an ensemble (ours) with
a single network ((Haloi, 2015)), it is important to
notice that our ensembles have only 3 models, and
image input is 32x32 vs Haloi’s 128x128. From a
computational point of view our ensemble is cheaper
to evaluate, and the full ensemble has less trainable
parameters than a single network from (Haloi, 2015).
The best ensemble for GTSRB achieved an accuracy
of 99.85%.
4.4 Cross-testing
To assess the generalisation ability achievable with
the different synthetic datasets we performed a test
across different countries. Our approach is to evalu-
ate a model trained in a country dataset, for instance
from Germany, in the common classes of the test set
of another country, for instance Belgium. By com-
mon classes we mean classes where the pictograms
have the same semantic meaning even though the pic-
tograms may vary slightly from country to country,
see Figure 11.
For this evaluation we selected models trained
with real data (R), synthetic with exponential bright-
ness and with solid colour backgrounds (SES). The
reason we chose the SES models is twofold: the
datasets for these models are easier to construct and
less biased since no background real imagery is re-
quired. Furthermore, these models do not have
any brightness information from the training dataset,
hence are less biased towards a particular dataset.
Essentially, from country to country, the synthetic
datasets vary in the number of classes and respective
templates.
By evaluating against test sets from other coun-
tries, we are in practice evaluating samples in differ-
ent lighting conditions, captured with different cam-
eras, and even minor differences on the sign pic-
tograms. These circumstances should be similar to
those found in a deployment of these classifiers in as-
sisted driving vehicles even when considering a single
country, as it is common to have multiple versions of
the same sign coexisting.
Results in Table 9 hint at a higher generalisa-
tion ability from the synthetic data when presented
with data acquired in different circumstances and/or
Figure 11: Sample signs from classes with the same seman-
tic meaning from the three datasets: GTSRB, BTSC , and
rMASTIF.
Table 9: Accuracy results for cross-testing. Each column
group describes the dataset used; Rows indicate datasets
used for evaluation purposes. Second column reports on
the number of samples from the combined test datasets.
Test set # R SER SES
Trained for GTSRB
BTSC + rMASTIF 1829 97.18 98.33 98.30
Trained for BTSC
GTSRB + rMASTIF 6410 82.39 95.75 94.73
Trained for rMASTIF
GTSRB + BTSC 8029 90.24 94.50 95.41
slightly different pictograms. The accuracy values
reported are significantly higher for synthetic data,
and show more consistency for the different training
datasets.
4.5 Unleashing Synthetic Datasets
All previous datasets were built based only on the re-
spective training sets, i.e, all the templates used are
for traffic signs that exist in the training sets, and may
therefore not be fully representative of the class. In
this section we will explore the potential of adding
further templates to cover some classes that have sig-
nificant variations on the test that are not present in
the training set.
Note that in a real scenario it is perfectly legiti-
mate to gather as many templates as possible, and this
does not represent significant additional human effort
apart from collecting the templates themselves.
Having signs that do not match exactly the sam-
ples from a particular class is a common problem in
real traffic sign recognition. As mentioned before,
this can be due to the introduction of new pictograms
Bridging the Gap between Real and Synthetic Traffic Sign Repositories
51
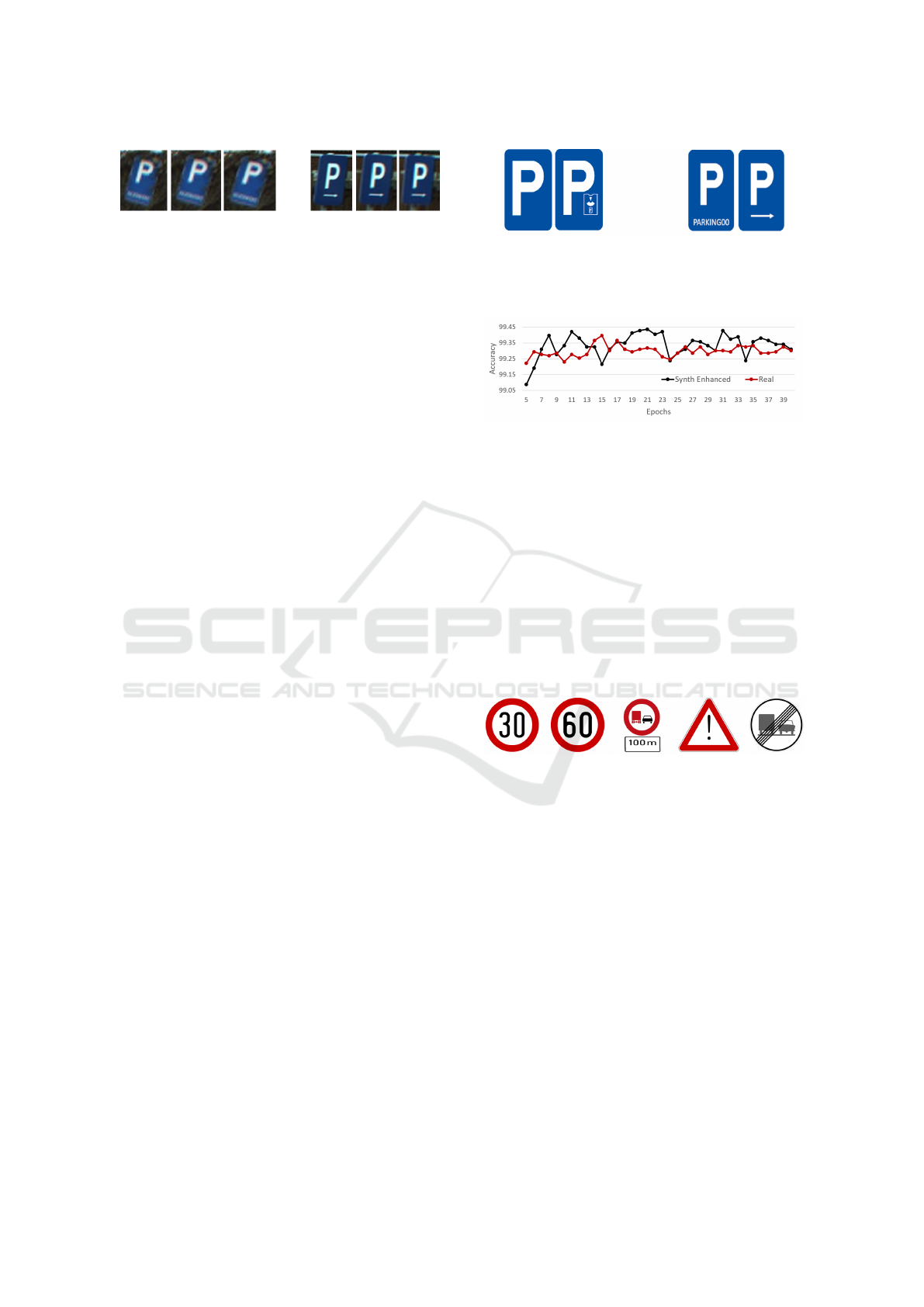
Figure 12: BTSC - Set of images misclassified by the ma-
jority of the models, both trained on real and synthetic data.
for previous classes, or different sign manufacturers.
The introduction of new signs is also a related is-
sue. When this occurs, and assuming a real data only
approach, time is required for the signs to be placed
and images captured in sufficient numbers. Synthetic
signs are an excellent option to have the recognition
system dealing with these new signs from the start.
As the example shows, the only requirements are to
have the proper templates and to retrain the network.
With time, real images will become available which
can then be merged to the existing dataset, further in-
creasing the model’s accuracy.
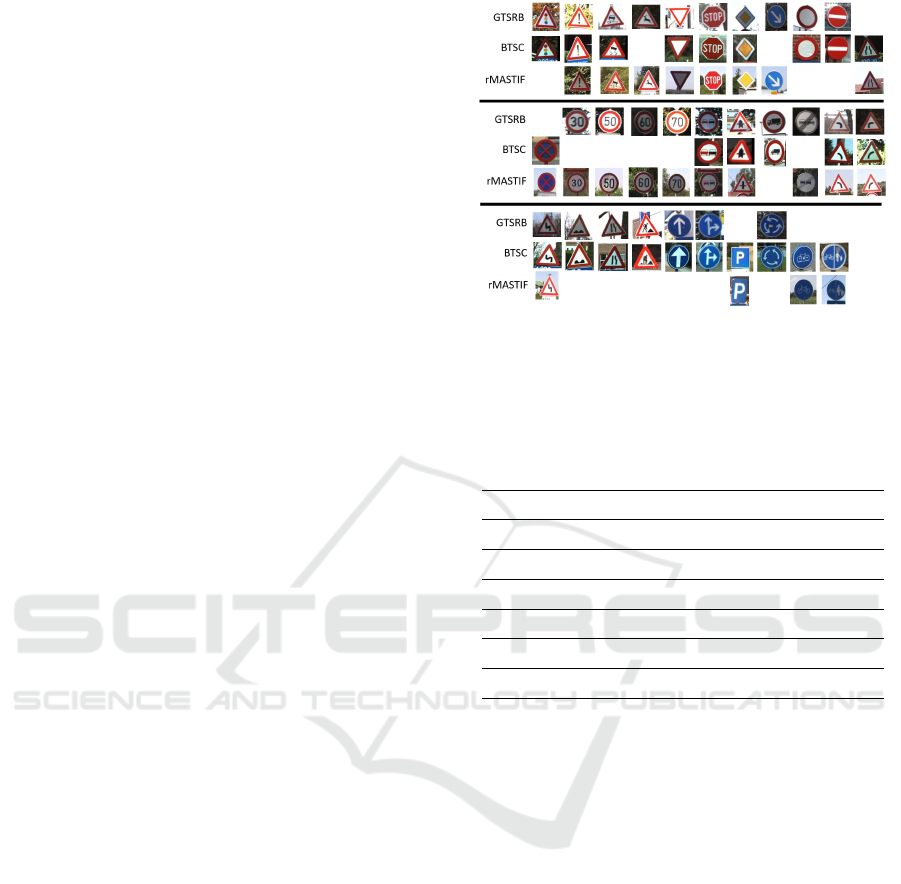
4.5.1 BTSC
Considering the BTSC we find a set of six images be-
longing to class 45 from the test set which are mis-
classified by the majority of the models, both trained
with synthetic and real data, see Figure 12. Since
there are no images from these traffic sign variations
in the training set, the synthetic datasets previously
built did not include these templates.
Figure 13 presents the templates that can be found
in the training set (left) and the two templates that cor-
respond to the test set images in Figure 12. In BTSC
these all belong to the same class.
Five new enhanced instances of the SES datasets
were built, including the new templates for class 45
found in Figure 13. The models trained with these
datasets not only had 100% accuracy in class 45, but
also showed no adversarial effect from this addition,
surpassing the average accuracy result for the models
trained with real data.
Figure 14 presents the average test accuracy for
each epoch for both models trained with the enhanced
synthetic dataset and real dataset, showing that the en-
hanced synthetic datasets in general provided more
accurate models when compared to the real original
dataset.
We also tested merging one of these datasets with
the real BTSC dataset. After 40 epochs we got
99.76% accuracy, with only 6 misclassified images
out of 2520. This result surpasses the current state
of the art result of 99.72% reported in (Mahmoud and
Guo, 2019), with inputs that have a quarter of the pix-
els and a model with a lighter architecture. The best
epoch achieved an accuracy of 99.84%.
Figure 13: BTSC - left: templates from the training set;
right: new templates from the test set (note: the text was
added just for the template and does not correspond to any
real sign).
Figure 14: BTSC - performance comparison between mod-
els trained with the enhanced synthetic training sets vs mod-
els trained with real data.
4.5.2 GTSRB
To create the new unleashed datasets we add tem-
plates to some classes, as can be seen in Figure 15.
These templates represent variations that are either
missing from the training set or are difficult to deter-
mine if they are present in the training set due to the
poor quality of some of the samples. Technically, the
sign in the centre of Figure 15 is not a traffic sign, but
it is a common combination, with this combination
being present in both the training and test sets.
Figure 15: Added templates for GTSRB.
For all the classes where new templates were
added we noticed a decrease in the number of mis-
classified samples, without relevant adverse conse-
quences in other classes. Results in Table 10 show
a significant improvement in all synthetic models.
As in the Belgian case we also tested merging real
data with one of the SES and SJR models. The ac-
curacy obtained was 99.80% for Real + SES, and
99.79% for Real + SJR. These are marginally be-
low the state of the art results from (Haloi, 2015)
(99.81%), and our network has roughly a quarter of
the number of parameters (see Table 4), implying that
evaluation is much lighter in our case.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
52

Table 10: Results for unleashed GTSRB datasets.
Prev Results Unleashed
SES 99.25 ± 0.06 99.41 ± 0.08
SER 99.32 ± 0.25 99.40 ± 0.10
SJS 99.39 ± 0.08 99.50 ± 0.09
SJR 99.41 ± 0.05 99.57 ± 0.04
5 CONCLUSION
In the proposed synthetic dataset generation pipeline,
besides traditional geometric and colour operations,
we introduced Perlin and Confetti Noise as operators
to craft synthetic samples. The usage of solid colour
backgrounds, as opposed to real backgrounds, was
also explored.
In a real scenario a traffic sign classifier must be
able to deal with a larger number of classes than those
present in the existing datasets. Adding a new class
with real data implies gathering a significant num-
ber of images where those signs are present, cropping
those images to obtain the ROI for the signs, and pro-
viding appropriate labels. On the other hand, with
synthetic data the addition of a new class amounts to
using a new template.
Based on the results we obtained, we strongly be-
lieve that creating synthetic datasets is an approach
worth pursuing. Using traditional methods, even
when no knowledge from real test sets was used, we
were able to clearly surpass synthetic dataset gener-
ation with previous approaches. While there is still
room for improvement, we were able to achieve re-
sults closer to real-world data with a standalone syn-
thetic training set on three distinct European test sets.
When considering merging and ensembles of real and
synthetic datasets, we surpassed previously reported
results with both real and synthetic data. Our cross
testing experiment also suggests that our synthetic
datasets provide a better generalisation ability com-
pared to real data.
As opposed to most other methods, we did not aim
at generating photo-realistic images. Yet, our results
clearly surpass previous attempts based on generat-
ing lifelike imagery, including those based on GANs.
Could this be interpreted as a hint that pursuing a sim-
ilarity with real imagery may not be the best option?
Further work is required to evaluate this.
Synthetic datasets have the potential to be able to
deal with different weather conditions such as fog,
snow and rain, as well as night time. This requires
increasing our pipeline to include these scenarios and
we expect to further explore the usage of synthetic
data in this direction.
ACKNOWLEDGEMENTS
This work has been supported by FCT – Fundac¸
˜
ao
para a Ci
ˆ
encia e Tecnologia within the RD Units
Project Scope: UIDB/00319/2020
REFERENCES
Araar, O., Amamra, A., Abdeldaim, A., and Vitanov, I.
(2020). Traffic sign recognition using a synthetic data
training approach. International Journal on Artificial
Intelligence Tools, 29.
Arcos-Garc
´
ıa, A., Alvarez-Garcia, J., and M. Soria-Morillo,
L. (2018). Deep neural network for traffic sign recog-
nition systems: An analysis of spatial transformers
and stochastic optimisation methods. Neural Net-
works, 99.
Cires¸an, D., Meier, U., Masci, J., and Schmidhuber, J.
(2012). Multi-column deep neural network for traffic
sign classification. Neural Networks, 32:333 – 338.
Selected Papers from IJCNN 2011.
ˇ
Segvic, S., Brki
´
c, K., Kalafati
´
c, Z., Stanisavljevi
´
c, V.,
ˇ
Sevrovi
´
c, M., Budimir, D., and Dadi
´
c, I. (2010). A
computer vision assisted geoinformation inventory for
traffic infrastructure. In 13th International IEEE Con-
ference on Intelligent Transportation Systems, pages
66–73.
Haloi, M. (2015). Traffic sign classification using deep
inception based convolutional networks. ArXiv,
abs/1511.02992.
Horn, D. and Houben, S. (2020). Fully automated traffic
sign substitution in real-world images for large-scale
data augmentation. In 2020 IEEE Intelligent Vehicles
Symposium (IV), pages 465–471.
Jain, A., Mishra, A., Shukla, A., and Tiwari, R. (2019). A
novel genetically optimized convolutional neural net-
work for traffic sign recognition: A new benchmark
on belgium and chinese traffic sign datasets. Neural
Processing Letters, pages 1–25.
Juri
ˇ
si
´
c, F., Filkovi
´
c, I., and Kalafati
´
c, Z. (2015). Multiple-
dataset traffic sign classification with onecnn. In 2015
3rd IAPR Asian Conference on Pattern Recognition
(ACPR), pages 614–618.
Liu, Y.-T., Chen, R.-C., and Dewi, C. (2021). Generate
realistic traffic sign image using deep convolutional
generative adversarial networks. In 2021 IEEE Con-
ference on Dependable and Secure Computing (DSC),
pages 1–6.
Luo, H., Kong, Q., and Wu, F. (2018). Traffic sign im-
age synthesis with generative adversarial networks.
In 2018 24th International Conference on Pattern
Recognition (ICPR), pages 2540–2545.
Mahmoud, M. A. B. and Guo, P. (2019). A novel method
for traffic sign recognition based on dcgan and mlp
with pilae algorithm. IEEE Access, 7:74602–74611.
Perlin, K. (1985). An image synthesizer. SIGGRAPH Com-
put. Graph., 19(3):287–296.
Bridging the Gap between Real and Synthetic Traffic Sign Repositories
53

Saha, S., Kamran, S. A., and Sabbir, A. S. (2018). To-
tal recall: Understanding traffic signs using deep
hierarchical convolutional neural networks. CoRR,
abs/1808.10524.
Sermanet, P. and LeCun, Y. (2011). Traffic sign recognition
with multi-scale convolutional networks. In The 2011
International Joint Conference on Neural Networks,
pages 2809–2813.
Spata, D., Horn, D., and Houben, S. (2019). Generation
of natural traffic sign images using domain transla-
tion with cycle-consistent generative adversarial net-
works. In 2019 IEEE Intelligent Vehicles Symposium
(IV), pages 702–708.
Stallkamp, J., Schlipsing, M., Salmen, J., and Igel, C.
(2012). Man vs. computer: Benchmarking machine
learning algorithms for traffic sign recognition. Neu-
ral Networks, (0):–.
Stergiou, A., Kalliatakis, G., and Chrysoulas, C. (2018).
Traffic sign recognition based on synthesised training
data. Big Data and Cognitive Computing, 2(3).
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S. E.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2014). Going deeper with convolutions.
CoRR, abs/1409.4842.
Timofte, R., Zimmermann, K., and Gool, L. V. (2009).
Multi-view traffic sign detection, recognition, and 3d
localisation. In 2009 Workshop on Applications of
Computer Vision (WACV), pages 1–8.
Yu, F. and Koltun, V. (2016). Multi-scale context aggrega-
tion by dilated convolutions. CoRR, abs/1511.07122.
DeLTA 2022 - 3rd International Conference on Deep Learning Theory and Applications
54
