
CatNap: Leveraging Generic MPC for Actively Secure
Privacy-enhancing Proximity Testing with a Napping Party
Ivan Oleynikov
1
, Elena Pagnin
2
and Andrei Sabelfeld
1
1
Chalmers University, Gothenburg, Sweden
2
Lund University, Lund, Sweden
Keywords:
Privacy, Proximity-Testing, Multi-Party Computation, Active Security.
Abstract:
Proximity testing is at the core of several Location-Based Services (LBS). Despite a series of reported and
confirmed abuses, modern LBSs still demand their clients to disclose their locations in plain in order to preform
location proximity testing.
This works aims at enhancing proximity testing with privacy. We design CatNap a novel protocol that (1)
implements precise Euclidean distance matching; (2) allows matching even if the clients are not online at
the same time (the “napping party” feature); (3) is secure against active adversaries (malicious actors that
corrupt up to one party); (4) makes black-box use of generic Multi-Party Computation techniques (any future
improvement of the underlying building blocks will also boost CatNap); and (5) is efficient: servers run with
about 0.03 seconds of CPU time and 5.6MB of communication, while clients perform only a small number of
Boolean operations and need just 51 bytes of communication.
1 INTRODUCTION
Location-Based Services (LBS) have gained a steadily
increasing role in our lives by providing personal-
ized services based on users’ locations, e.g., display-
ing nearby points of interest, selecting optimal ser-
vices (e.g., taxi rides), or even triggering specific
location-based behaviors (e.g., smart home devices).
At the core of most LBS is a proximity testing (PT)
protocol that allows the system to decide whether
some parties lie within a certain proximity of one an-
other. This paper focuses on PT by means of privacy-
enhancing protocols and input coordinates (e.g., users
know their own locations), which is the main use
case for LBS. We acknowledge the existence of other
approaches that implement PT via direct commu-
nication and measuring signal strength using, e.g.,
Bluetooth (Troncoso et al., 2020) (adopted in some
COVID-19 contact tracing apps). While these so-
lutions might provide an accurate distance calcula-
tion, they occupy a different niche: in some LBS it
might not be possible for users to pick each other sig-
nals (e.g., planning for a shared ride between towns;
matching with a proximity radius larger than the sig-
nal range; or matching with offline users).
Modern taxi services match drivers and passen-
gers according to the proximity of their routes, or the
start and endpoints of their journeys. Messaging apps
use PT to match users who are in the same area, and
online mapping services use it to help users discover
close-by places.
In current practice, LBS are full-trust centralized
services: to deliver their functionality, they require
users to submit their location data to the LBS. This
way, the LBS provider knows the location of any ac-
tive client in their system; and clients cannot check
if their data has been used the way they expect, and
not misused by the LBS provider or stolen by an at-
tacker who breached the security of LBS. For exam-
ple, Snapchat employees reportedly abused their priv-
ileges to spy on users’ location data (Cox, 2019), and
similar cases were reported about Uber (Hern, 2016),
Yahoo (Cole, 2019), and Facebook (Cox and Hoppen-
stedt, 2018). This raises privacy concerns over the ex-
isting practices and motivates the search for solutions
that would ensure the privacy of user data.
This paper designs a cryptographic protocol that
performs proximity testing in a privacy-enhancing
way. Such protocol is required to be correct (pro-
vide the right answer) and secure (preserve input pri-
vacy) by revealing only the outcome of the PT, and
no further information about users’ locations. In the
remainder of the paper, whenever we refer to PT, we
will mean privacy-enhancing proximity testing.
Oleynikov, I., Pagnin, E. and Sabelfeld, A.
CatNap: Leveraging Generic MPC for Actively Secure Privacy-enhancing Proximity Testing with a Napping Party.
DOI: 10.5220/0011279500003283
In Proceedings of the 19th International Conference on Security and Cryptography (SECRYPT 2022), pages 237-248
ISBN: 978-989-758-590-6; ISSN: 2184-7711
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
237

Formalizing PT. There exist multiple approaches to
formalizing “location” and “proximity” in PT. The
grid-based approach (Zhong et al., 2007; Siksnys
et al., 2009; Siksnys et al., 2010; Freni et al., 2010;
Mascetti et al., 2011; Narayanan et al., 2011; Nielsen
et al., 2012; Kotzanikolaou et al., 2016) divides the
whole plane into a grid of cells, the clients determine
the cell they are in and then simply perform equal-
ity test on their cell identifiers. Although it might be
tempting to do PT at a cost of a simple equality test,
this approach suffers from inherent imprecision. An-
other alternative is polygon-based matching (J
¨
arvinen
et al., 2019), which becomes less efficient if one wants
to approximate a circle with a polygon (but may suit
applications like geofencing). We follow the line of
work on Euclidean distance-based matching (Hall-
gren et al., 2015; Oleynikov et al., 2020; J
¨
arvinen
et al., 2019; Pagnin et al., 2019), because it is pre-
cise and it is natural to some important applications,
e.g., messengers, social networks, and taxi. Euclidean
distance may serve as an approximation of other mea-
sures like Manhattan distance.
In this work, we consider users’ locations to be
points on a (discretized) Euclidean plane (which can
approximate a small enough region of Earth’s sur-
face). Our functionality matches two users (outputs
1 instead of 0) if the distance between their input lo-
cations does not exceed a threshold radius value R,
on which they agree beforehand. The threshold ra-
dius R here serves as a parameter of the protocol, and
can be chosen to be any positive integer when instan-
tiating the protocol; it is fixed and public, i.e. known
to all the parties prior to the protocol start. We fo-
cus on the case of 2-dimensional client locations (i.e.
belonging to a Euclidean plane) for a fair comparison
with prior work, but it is not essential for our protocol:
CatNap easily generalizes to n-dimensional Euclidean
distance-based matching.
Distinguishing Features of CatNap. There are three
crucial features that we achieve with CatNap but that
were out of reach for previous work (Hallgren et al.,
2015; J
¨
arvinen et al., 2019; Oleynikov et al., 2020) on
Euclidean distance-based PT:
Offline. We adopt the setting of “napping party”
(Oleynikov et al., 2020): in addition to the two clients
who want to use the PT, we introduce two servers that
will aid the clients in it. One of the clients can con-
nect to the servers at any moment, submit its location
(in a privacy-preserving manner) to them and go of-
fline. The other client will connect to them later, sub-
mit its location, wait for the servers to perform match-
ing, and retrieve the result. The clients connect to the
servers at possibly disjoint moments of time. In real-
life applications, the two servers can be run by inde-
pendent, mutually distrusting organizations which are
providing a single LBS together. Introducing servers
is necessary to perform privacy-preserving PT while a
client is offline. The use of two not-colluding servers
allows us to remove the requirement for clients to
share keys or any other secret information before the
protocol starts. As a consequence, the data submitted
by a client is not tied to a specific other client and it is
up to the servers to decide whom to match the client
with.
RadiusInd. In (Hallgren et al., 2015; Oleynikov
et al., 2020) the protocol performance depends on R,
the proximity radius. This is a significant limitation
that makes such protocols practical only for small
enough values of R. In contrast, our CatNap’s per-
formance (computation, communication, and round
complexity) does not depend on the chosen value of
R.
ActiveSec. From the security viewpoint, for a
protocol to be truly practical it needs to be secure
against active adversaries (actively secure for short).
This means that the protocol preserves its security
even if some of the parties get corrupted by the adver-
sary, who maliciously makes them deviate from the
protocol specification. As discussed by Oleynikov et
al. (Oleynikov et al., 2020), if the adversary corrupts
both servers, it can recover all locations submitted by
clients. In this setting, it is impossible to guarantee
location privacy and clients’ input privacy is lost. We
require CatNap to have the best possible active secu-
rity in the given circumstances: to be secure as long
as at least one of the two servers is honest.
The offline feature is particularly distinguishing
since most existing PT protocols (Zhong et al., 2007;
Hallgren et al., 2015; Oleynikov et al., 2020; Hallgren
et al., 2016; Sakib and Huang, 2016; J
¨
arvinen et al.,
2019) require the clients (who want to perform the PT
of their locations) to communicate directly with one
another. This presents a significant limitation to the
protocols’ applications: in some scenarios, users ex-
pect to be matched with their friends or places on the
map (e.g. cafes, stores) even when the other clients
are not online. Therefore it may be desirable to have
an intermediate entity that the clients could interact
through. While the use of servers is necessary to per-
form offline PT, relying on two servers comes with an
extra benefit: now the clients can reduce their work-
load by offloading computations to the servers. Al-
though the servers do not learn the matching outcome,
they know which clients requested PT to be run (also
how many times and when the users did so); this is a
necessary compromise since perfectly hiding the user
identities to the servers would introduce an unrealistic
performance overhead and negate all the benefits of
SECRYPT 2022 - 19th International Conference on Security and Cryptography
238
Offline feature. Concrete server policies for choos-
ing clients to match are very application-specific and
are out of the scope of this work. It must be noted that
such a policy can be correctly enforced as long as at
least one of the two servers honestly follows it; which
is realistic in our model, where the protocol security
already requires one of the servers to be honest.
Table 1 summarizes the features achieved by our
protocol, CatNap, compared to the most relevant re-
cent works. The InnerCircle protocol by Hallgren
et al. (Hallgren et al., 2015) involves two clients
who communicate with one another directly, its main
drawbacks are passive security and performance pro-
portional to R
2
. The protocols ABY
C
Y
and ABY
C
AY
by J
¨
arvinen et al. (J
¨
arvinen et al., 2019) have per-
formance that is independent of the radius value R,
but use passively secure two-party computation tech-
niques which implicitly demand clients be online at
the same time and interact. The OLIC protocol by
Oleynikov et al. (Oleynikov et al., 2020) is essentially
an adaptation of InnerCircle to the two-server setting,
and thus it is the first protocol to provide the Offline
feature. It inherits some of the drawbacks of Inner-
Circle (Hallgren et al., 2015): passive security and
R
2
-dependent performance. These works are further
discussed in section 5. This paper presents CatNap,
the first protocol for privacy-enhancing location PT
to achieve all the above three properties.
Table 1: Comparison of CatNap features to the related pro-
tocols.
Protocol
Offline
RadiusInd
ActiveSec
InnerCircle
(Hallgren et al., 2015)
− − −
ABY
C
Y
and ABY
C
AY
(J
¨
arvinen
et al., 2019)
− + −
OLIC (Oleynikov et al., 2020) + − −
CatNap + + +
Our Contribution. This paper presents CatNap,
a novel, actively secure protocol for server-aided
privacy-enhancing PT. CatNap is the first actively se-
cure PT protocol to achieve practical performance.
We provide a formal description of the CatNap pro-
tocol and its building blocks. We formally prove its
security in Canetti’s hybrid model (Canetti, 1998), as
long as one of the two servers is honest. In addition,
we develop a proof of concept implementation of Cat-
Nap and compare its performance against InnerCircle
(Hallgren et al., 2015), OLIC (Oleynikov et al., 2020),
ABY
C
Y
and ABY
C
AY
(J
¨
arvinen et al., 2019). Although
the InnerCircle, ABY
C
AY
, and ABY
C
Y
protocols (Hall-
gren et al., 2015; J
¨
arvinen et al., 2019) do not work in
the same setting as CatNap (their clients talk directly
to one another and are required to be online at the
same time), we still include them to see how CatNap
compares with server-less PT.
Our evaluations show that CatNap’s demands on
the servers in terms of amortized computation and
communication are quite moderate. For example,
performing 2000 matchings requires 0.03 seconds of
CPU time (ignoring the network latency) and 6 MB of
communication in total per matching. We stress that
taking into account only the amortized complexity is
practical since in real-life scenarios LBS providers
will be matching large numbers of users and will be
able to run a longer precomputation phase. It is worth
noting that the improved amortized performance of
our protocol comes solely from the MPC techniques
edaBits (Escudero et al., 2020), SPDZ2k (Cramer
et al., 2018), Tinier (Frederiksen et al., 2015) which
tend to perform better when run multiple times, not
the construction we present here. The computation
and communication cost for clients is negligible, we
ignore it in our benchmarks.
Overview of Our Technique. We build CatNap us-
ing generic Multi-Party Computation (MPC) tech-
niques provided out of the box by the MP-SPDZ
framework (Keller, 2020). In our protocol, the
clients “outsource” the functionality computation to
the servers using the technique of Jakobsen et. al.
(Jakobsen et al., 2014): each of the two clients secret-
shares its location between the servers; the servers
input the shares into an MPC protocol, reconstruct
them there and evaluate the PT functionality; after
that, the servers use a simple masking technique to
deliver the result to one of the clients without learn-
ing it themselves. Since the PT involves both arith-
metic (computing distance between the clients) and
non-arithmetic (comparing the distance to the thresh-
old radius R) operations, we combine two MPC proto-
cols: SPDZ2k (Cramer et al., 2018) and Tinier (Fred-
eriksen et al., 2015), using the former for computation
in the arithmetic domain, and the latter for the binary
domain. To convert values from arithmetic to binary
and vice versa we use the daBits (Rotaru and Wood,
2019) and edaBits (Escudero et al., 2020) techniques.
Assumptions. CatNap is not a fully-featured protocol
that can be used for a real-life LBS implementation
out of the box, it is best seen as a fundamental build-
ing block that can be used by an LBS. CatNap works
in the standard setting of MPC protocols (Lindell,
2016), the same setting was used for a number of pre-
vious PT protocols (Hallgren et al., 2015; Oleynikov
et al., 2020; J
¨
arvinen et al., 2019) albeit the (passive)
CatNap: Leveraging Generic MPC for Actively Secure Privacy-enhancing Proximity Testing with a Napping Party
239

adversary was more limited in those protocols. The
assumptions of this model are: parties communicate
through secure point-to-point channels (which can be
implemented in real life by means of Public Key In-
frastructure), at the beginning of the protocol the (ac-
tive) adversary can corrupt some of the parties and
arbitrarily change their behavior attempting to learn
something about the other parties’ inputs and cause
the other parties’ outputs to be incorrect. CatNap en-
sures that the adversary can not do this as long as both
servers are not corrupted at the same time.
Scope. The setting of CatNap does not address the
data leakage that is allowed by the functionality it-
self, e.g., knowing whether some user is close to you
or not inevitably reveals something about that user’s
location, or when two users perform the matching
the servers will learn the fact that matching happened
(since they know what users they communicated with
and when) but not the result of that matching. CatNap
does not define how clients specify whom they want
to be matched with; such a selection process highly
depends on the application, and, as a consequence,
should not be implemented by a sub-routine such as
CatNap. Also, CatNap does not protect against at-
tacks by a user who might probe the protocol with
different maliciously crafted locations trying to learn
something about the other users. To mitigate this in
a real-life instantiation, it may be necessary to ap-
ply some policy similar to MaxPace (Hallgren et al.,
2016) limiting the queries that a client is allowed to
make. Also, CatNap trivially supports replacing two
servers with more while still allowing all of them ex-
cept one to be corrupted. This setting relaxes the secu-
rity assumption at the cost of extra performance over-
head; a similar model with multiple servers is offered
by the Sharemind (Sharemind, 2022) framework.
2 PRELIMINARIES
Ideal Functionality. To model the mixed arithmetic-
binary MPC, we make black-box usage of the func-
tionality F
AB-MPC
shown on Figure 1. This function-
ality is implemented by the edaBits (Escudero et al.,
2020) technique. Most of the commands in F
AB-MPC
repeat the functionality on which the edaBits is built,
except for the commands ConvertA2B and Compare
which are implemented using the edaBits technique
itself. The Compare is obtained by combining the
other commands of F
AB-MPC
, but there are multiple
ways to do that (e.g., using a Boolean comparison cir-
cuit or with probabilistic truncation (Escudero et al.,
2020)). For the sake of generality, we define Compare
as a standalone command and leave its specification
Input: On input (Input, P
i
, type, id, x) from P
i
and
(Input, P
i
, type, id) from all other parties, with id
a fresh identifier, type ∈ {binary, arithmetic}
and x ∈ Z
2
or x ∈ Z
2
k
(depending on type), store
(type, id, x).
Linear Combination: On input
(LinComb, type, id, (id
i
)
m
i=1
, (c
j
)
m
j=0
), where
each id
j
is stored in memory and c
j
∈ Z
2
if
type = binary or c
j
∈ Z
2
k
if type = arithmetic,
retrieve ((type, id
1
, x
1
), . . . (type, id
m
, x
m
)), compute
y = c
0
+
∑
m
i=1
x
i
· c
i
modulo 2 if type = binary
and modulo 2
k
if type = arithmetic, and store
(type, id, y).
Multiply: On input (Mult, type, id, id
1
, id
2
) from all
parties (where id
1
, id
2
are present in memory), re-
trieve (type, id
1
, x), (type, id
2
, y), compute z = x ·y
modulo 2 if type = binary and modulo 2
m
if type =
arithmetic, and store (id, z).
From Binary to Arithmetic: On input
(ConvertB2A, id, id
′
) from all parties, retrieve
(binary, id
′
, x) and store (arithmetic, id, x).
From Arithmetic to Binary: On input
(ConvertA2B, id
0
. . . id
l−1
, id
′
) from all
parties, retrieve (arithmetic, id
′
, x), bit-
decompose it into (x
0
, . . . x
k−1
) and store
((binary, id
0
, x
0
), . . . (binary, id
l−1
, x
l−1
)).
Compare: On input (Compare, id, id
′
, y) from all par-
ties, where y ∈ Z
2
m
, retrieve (arithmetic, id, x),
store (binary, id
′
, 1) if x ≤y or (binary, id
′
, 0) oth-
erwise.
Output: On input (Output, type, id) from all honest
parties (where id is present in memory), retrieve
(type, id, y) and output it to the adversary. Wait for
an input from the adversary; if this is Deliver then
output y to all parties, otherwise output Abort.
Figure 1: Ideal functionality F
AB-MPC
of MPC arithmetic
blackbox modulo 2 and modulo 2
k
(Escudero et al., 2020).
up to specific implementations. The edaBits (Escud-
ero et al., 2020) is implemented in MP-SPDZ (Keller,
2020) framework (which we use for our benchmarks).
Notation. We will use the notation JxK
2
m
for
value x ∈ Z
2
m
being input into the F
AB-MPC
with type = arithmetic, and JxK
2
for value x ∈
{0, 1} with type = binary (the variable names x
are assumed to be unique over both arithmetic
and binary domains). When describing proto-
cols that use F
AB-MPC
in pseudocode, we will
use the listed message types as procedure names,
e.g., JxK
2
m
← ConvertB2A(JyK
2
) means sending
(ConvertB2A, “x”, “y”) to the F
AB-MPC
. We will also
use values J·K
2
m
in arithmetic expressions and J·K
2
in
Boolean expressions (i.e., arithmetics over F
2
), im-
plying evaluation of the corresponding expressions
using Mult and LinComb. For a vector of bits v =
SECRYPT 2022 - 19th International Conference on Security and Cryptography
240
(v
0
, . . . v
k−1
) we will write J
−→
v K
2
to denote a vector of
bits (Jv
0
K
2
, . . . Jv
k−1
K
2
), all of which are in the binary
domain of F
AB-MPC
.
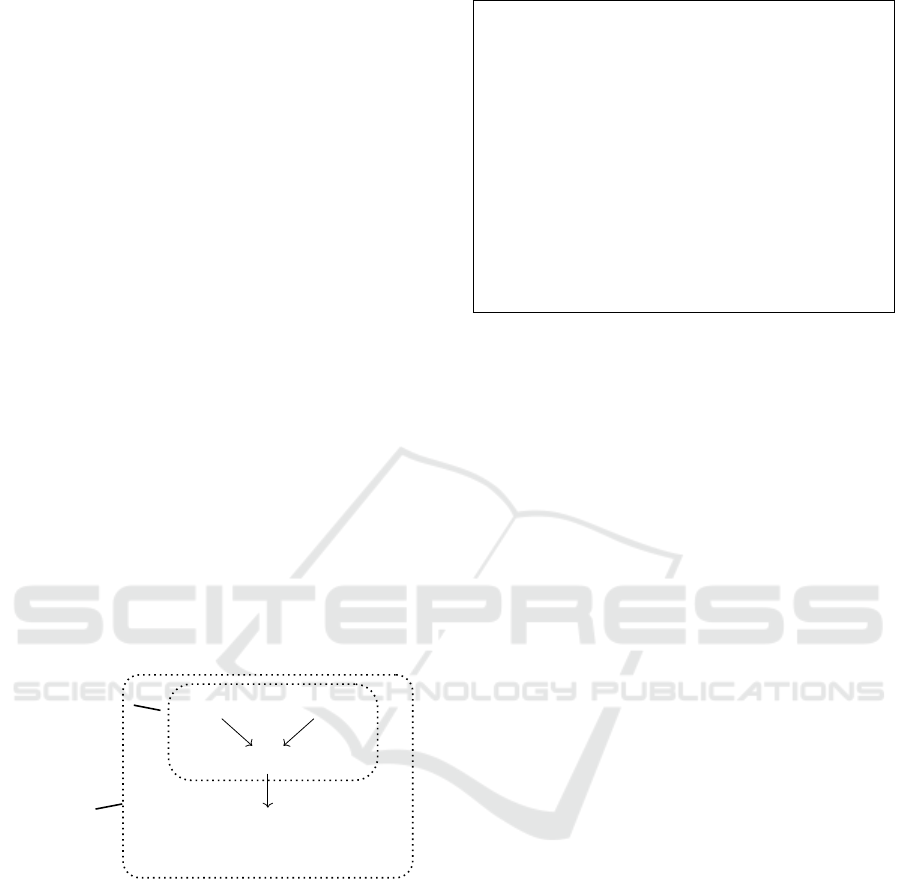
3 THE CatNap PROTOCOL
The CatNap protocol is built by combining the pre-
vious works in a blackbox way, i.e., relying only on
their most standard properties. Figure 2 gives an
overview of the order in which the existing techniques
are applied to one another. Here, Tinier provides
MPC computations in the binary domain, SPDZ2k
provides computations in the arithmetic domain, ed-
aBits combines the two to implement a single MPC
capable of doing both and converting between them,
and, finally, the outsourcing technique allows the
clients to securely transfer their data into the edaBits
MPC and then get back the result even if one of the
servers is untrusted. The rest of this section shows
the operations done by CatNap in greater detail; it es-
sentially unfolds the last step from Figure 2 to show
how the inputs and outputs are transferred to and from
edaBits MPC, and it also shows how the squared dis-
tance between parties is computed and compared to
the radius. The edaBits is still treated as a blackbox
in this section, since unfolding that one as well would
yield too much detail and harm the high-level exposi-
tion.
Tinier
SPDZ2k
edaBits
Outsourcing Technique from
(Jakobsen et al., 2014)
F
AB-MPC
CatNap
Figure 2: The diagram of blackbox applications of previous
works that yields CatNap protocol and the F
AB-MPC
func-
tionality that we use to build CatNap.
CatNap involves four parties: two servers
Server-1 and Server-2; and two clients Alice and
Bob. Alice and Bob know their respective locations
(x
a
, y
a
) and (x
b
, y
b
), and will input these at the start
of the protocol. At the end of its execution, CatNap
returns to Alice a bit ρ; ρ = 1 if her distance to Bob
is less than or equal to a given public value R, other-
wise ρ = 0. Following the offline feature introduced
by OLIC, in CatNap clients never exchange messages
with one another directly: all of Bob’s interaction hap-
pens before any interaction from Alice (i.e., Bob acts
as a “napping party” during the actual proximity test).
Parameters: a positive number R, the radius of proximity
testing; k, the bit width of clients’ coordinates.
Setup: Four parties, Alice, Bob, Server-1, Server-2.
Alice and Bob hold inputs (x
a
, y
a
) ∈ Z
2
2
k
and (x
b
, y
b
) ∈
Z
2
2
k
respectively
1. Receive (x
a
, y
a
) from Alice, and (x
b
, y
b
) from Bob.
Ensure that each value x
a
, y
a
, x
b
, y
b
consists of ex-
actly k bits; if not, abort.
2. Receive Deliver from both servers. If one of them
sends something else, abort.
3. Send ρ = 1 to Alice if (x
a
−x
b
)
2
+ (y
a
−y
b
)
2
≤ R
2
,
and ρ = 0 otherwise.
4. Send Received to both servers.
Figure 3: The F
PT
ideal functionality.
Figure 3 shows the formal definition of the ideal func-
tionality F
PT
that CatNap implements, while Figure 5
shows how CatNap implements F
PT
in the real world.
CatNap achieves the F
PT
functionality in three
major steps. First, the client inputs are transferred into
the F
AB-MPC
functionality. Remember that clients
cannot communicate with the F
AB-MPC
directly, only
servers do that. To transfer its input, each client
authenticates it using AMD (Algebraic Manipula-
tion Detection code) and secret-shares z, its authen-
tication key, and tag between the servers (Jakobsen
et al., 2014). The servers input the shares together
with the authentication tags into F
AB-MPC
, verify that
the shares are correct, and reconstruct them inside
the functionality. Second, the servers compute the
squared Euclidean distance between the clients’ input
locations:
D = (x
a
−x
b
)
2
−(y
a
−y
b
)
2
. (1)
Subsequently, the servers compare D to R
2
, ob-
taining a single bit ρ ∈ {0, 1}, where ρ = 1 if D ≤ R
2
,
and ρ = 0 otherwise. We remark that all computations
performed by the servers so far are implemented triv-
ially using the arithmetic and comparison operations
supported by F
AB-MPC
. This means that the servers
never see D or the client inputs in plain, yet by inter-
acting with the F
AB-MPC
functionality they can oper-
ate on these values without seeing them. Third, the
servers transfer the result ρ to one of the clients in a
safe way. This is achieved via the technique of Jakob-
sen et al. suggest in (Jakobsen et al., 2014). None of
the three steps reveals anything about the clients’ in-
puts or ρ to the servers; all of the values the servers
work with are either blinded with random masks or
are inside F
AB-MPC
.
The transferring of client inputs into the F
AB-MPC
functionality mentioned above is done in bit-
decomposed form: each coordinate is represented as a
CatNap: Leveraging Generic MPC for Actively Secure Privacy-enhancing Proximity Testing with a Napping Party
241

bit-vector, the vectors of all coordinates are concate-
nated and the result is transferred (using Transfer
shown below) into F
AB-MPC
. This has a useful side-
effect: we can naturally bound inputs of each client
by limiting the number of bits in their representation
(Transfer accepts only fixed number of bits). This
way, a malicious client cannot input values that are
too large and cause an overflow modulo 2
m
in the
computation of D (Equation (1)). We limit each client
coordinate to k bits, where k is any positive integer
such that 2k + 3 ≤ m (this ensures that there is no
overflow in the expression for D from Equation (1)).
I.e. for all meaningful values of R, it must hold that
0 ≤ R ≤ 2
k
√
2.
The Transfer Sub-protocol. Figure 4 shows the
sub-protocol that transfers the clients’ inputs into
F
AB-MPC
. This happens between a client (who can
be either Alice or Bob) and the two servers. The
purpose of this sub-protocol is to transfer a vector
z ∈ F
l
2
from the client into the binary domain of
the F
AB-MPC
functionality (without revealing it to the
servers). Formally, this protocol can work for values z
of any length. In practice, each client will execute this
sub-protocol exactly once with z being the concatena-
tion of the bit-decomposition of their input locations
(Alice will additionally concatenate a random bit ρ to
her z, which will be used in the last step of the whole
CatNap protocol. More on this on Figure 5).
The Transfer routine starts with a client, say,
Alice authenticating her input z using AMD with a
freshly generated key (step 2), then she secret-shares
the value z, the picked key and the authentication tag
between the two servers using XOR (steps 1 and 3).
The servers input the shares and tags into F
AB-MPC
(step 4). At this point, the servers can simply re-
veal the keys to each other (steps 5), since they can-
not modify the shares nor the tags they input into the
functionality. After that, the servers recompute the
authentication tag J
−→
u K
2
(step 6) and compare it to the
one that the servers have input (step 7).
Computing AMD is essentially free since it uses
only linear operations (see the extended paper ver-
sion (Oleynikov et al., 2022) for more details). On
the other hand, the equality check is the heaviest
step computations-wise, because this comparison re-
quires non-linear Boolean operation
W
. The servers
reveal the result JcK
2
of the equality check and abort
if JcK
2
= 0 (step 8). This completes the authentication
check, now each server is convinced that the other one
has not cheated while inputting the client data into
F
AB-MPC
. Now, they can reconstruct the secret-shared
value J
−→
z K
2
(without revealing it yet), which is the re-
sult of running this sub-protocol.
Setup: One client (Alice or Bob) and the two servers
(Server-1 and Server-2). The servers have access to
the F
AB-MPC
functionality (of Figure 1).
Initial condition: The client knows its input z ∈ F
l
2
,
which is a sequence of l bits. σ is a statistical security
parameter.
Final condition: The bits of z are input into F
AB-MPC
functionality as J
−→
z K
2
.
1. The client authenticates its input z using AMD with
freshly chosen key:
(a) κ ←
$
F
2
σ
(b) t = AMD
κ
(z)
2. The client secret-shares its input z, the authentication
key and tag input z using AMD with freshly chosen
key:
(a) r
(1)
←
$
F
2
l
, κ
(1)
←
$
F
2
σ
(b) r
(2)
= z ⊕r
(1)
(c) κ
(2)
= κ ⊕κ
(1)
(d) t
(1)
←
$
F
2
σ
(e) t
(2)
= t ⊕t
(1)
3. The client sends (r
(1)
, κ
(1)
, t
(1)
) to Server-1, and
(r
(2)
, κ
(2)
, t
(2)
) to Server-2.
4. The servers input shares r
(·)
and the tags t
(·)
into the
F
AB-MPC
(a) Jr
(1)
i
K
2
← Input
Server-1
(r
(1)
i
) for i ∈{0 . . . l −1}
(b) Jr
(2)
i
K
2
← Input
Server-2
(r
(2)
i
) for i ∈{0 . . . l −1}
(c) Jt
(1)
i
K
2
← Input
Server-1
(t
(1)
i
) for i ∈{0 . . . σ −1}
(d) Jt
(2)
i
K
2
←Input
Server-2
(t
(2)
i
) for i ∈ {0. . . σ −1}.
5. The servers send κ
(1)
and κ
(2)
to one another and
recover κ = κ
(1)
⊕κ
(2)
.
6. The servers recompute the tag for the z inside the
F
AB-MPC
:
(a) J
−→
u K
2
= AMD
κ
(J
−→
r
(1)
K
2
⊕J
−→
r
(2)
K
2
)
7. The servers check that the computed tags match the
expected values:
JcK
2
← EQ(J
−→
u K
2
, J
−→
t
(1)
K
2
⊕J
−→
t
(2)
K
2
),
where EQ((a
0
. . . a
l−1
), (b
0
. . . b
l−1
)) = ¬
W
l−1
i=0
a
i
⊕
b
i
is the logical formula that compares two sequences
of bits for equality.
8. The servers reveal the bit c ← Output(JcK
2
) and
abort if c = 0.
9. The servers reconstruct the value J
−→
z K
2
= J
−→
r
(1)
K
2
⊕
J
−→
r
(2)
K
2
, which is the result of this sub-protocol.
Figure 4: The Transfer sub-protocol.
The CatNap Protocol. Figure 5 provides a detailed
overview of our CatNap protocol. We recall that Cat-
SECRYPT 2022 - 19th International Conference on Security and Cryptography
242

Nap implements the F
PT
functionality from Figure 3.
The protocol starts with both clients transferring their
inputs into F
AB-MPC
using Transfer (step 1). They
do so by running the Transfer protocol on the con-
catenation of the bit-decomposition of their inputs.
Alice additionally transfers a random bit µ that will
be used in the final stage of CatNap to privately trans-
fer the matching outcome ρ from F
AB-MPC
back to
her. The servers convert the clients’ inputs from the
binary domain into the arithmetic domain, as required
in the F
AB-MPC
functionality (step 1c). Alice’s mask
µ remains in the binary domain.
Parameters: a positive number R, the radius of proximity
testing; k, the bit width of client coordinates.
Setup: Alice, Bob and the two servers. The servers have
access to the F
AB-MPC
functionality (depicted in Fig-
ure 1). It must hold that 2k + 3 ≤ m, where Z
2
m
is the
arithmetic domain of F
AB-MPC
. Alice and Bob receive
(x
a
, y
a
) and (x
b
, y
b
) as inputs.
1. Inputs outsourcing phase.
(a) Bob bit-decomposes his input coordinates x
b
and
y
b
, represents them as a single 2k bit string, and
runs the Transfer protocol (Figure 4) on it.
(b) Alice samples a random bit µ, bit decomposes
her inputs x
a
and y
a
, and represents all of them
as a single string of 2k + 1 bits. Then she runs the
Transfer protocol on it.
(c) The servers convert the client inputs into the arith-
metic domain
Jx
a
K
2
m
← ConvertB2A(J
−→
x
a
K
2
)
Jy
a
K
2
m
← ConvertB2A(J
−→
y
a
K
2
)
Jx
b
K
2
m
← ConvertB2A(J
−→
x
b
K
2
)
Jy
b
K
2
m
← ConvertB2A(J
−→
y
b
K
2
).
The value JµK
2
stays in the binary domain.
2. The Servers compute the squared distance between
Alice and Bob and compare it to R
2
:
(a) JDK
2
m
← (Jx
a
K
2
m
−Jx
b
K
2
m
)
2
+ (Jy
a
K
2
m
−Jy
b
K
2
m
)
2
(b) JρK
2
← Compare(JDK
2
m
, R
2
).
3. The servers mask the bit ρ with µ and reveal the re-
sult:
(a) Jρ
′
K
2
← JρK
2
⊕JµK
2
(b) ρ
′
← Output(Jρ
′
K
2
).
4. Both servers forward the obtained ρ
′
to Alice.
5. Alice ensures that both servers have sent the same
value of ρ
′
, unmasks it to get the final result ρ =
ρ
′
⊕µ, which she outputs.
Figure 5: The CatNap protocol.
Once the clients’ inputs are in F
AB-MPC
and ready
to be used, the servers can compute the squared dis-
tance and compare it to R
2
(step 2). All this is triv-
ially done using commands supported by F
AB-MPC
.
The outcome of this comparison, ρ, which is also the
result of matching, is stored in JρK
2
inside F
AB-MPC
.
At this point, the only thing that needs to be done is
revealing the result JρK
2
to Alice (without leaking
anything to anyone else). To achieve this, we mask it
with Alice’s random bit µ and open the masked value
ρ
′
(step 3) to both servers. Since the value is masked,
the servers cannot learn anything about it. Moreover,
since both servers hold a copy of the masked result,
none of them can modify it without getting caught.
Both servers forward ρ
′
to Alice (step 4), who makes
sure that both servers sent the same value, and un-
masks it to obtain the matching result ρ (step 5).
Security Proof. The security proof of CatNap is
obtained by combining the proofs of the underlying
techniques which we employ (Figure 2). We discuss
it in more detail in the extended version of this paper
(Oleynikov et al., 2022).
4 EVALUATION
To evaluate the performance of CatNap, we im-
plemented it in the MP-SPDZ (Keller, 2020) cryp-
tographic framework and made it available online
(Oleynikov et al., 2022). We compare its performance
to InnerCircle, ABY
C
AY
and ABY
C
Y
, OLIC. Because
of the inherent similarity between InnerCircle and
OLIC, we run only OLIC in our benchmarks and ar-
gue that most of the conclusions we make here about
OLIC hold for InnerCircle as well. For the perfor-
mance comparison, we focus total execution time (on
a single CPU core) and on total data exchanged by
parties.
To achieve a fairer comparison, we ran all the pro-
tocols on the same Linux machine having Intel(R)
Core(TM) i7-8700 CPU and 32 GB of RAM. For each
of the protocols we run here we use the implementa-
tion provided by their original papers: the C++ imple-
mentation using ABY (Demmler et al., 2015) frame-
work for ABY
C
AY
and ABY
C
Y
, the Python implemen-
tation using the GMP library for OLIC. Although the
protocols are implemented using different tools, the
bulk of their computations is done by low-level C li-
braries (and the communication cost is independent
of the tools), such comparison is useful nevertheless.
We do not introduce any intentional network latency,
all the parties are executed on the same machine (one
CPU core per party) and communicate through loop-
back network device. The following list shows the pa-
rameters with which we instantiated each of the pro-
tocols.
CatNap: Leveraging Generic MPC for Actively Secure Privacy-enhancing Proximity Testing with a Napping Party
243
OLIC. We use the most efficient one of the two
instantiations presented in the original paper
(Oleynikov et al., 2020), namely, the (EC) which
is based on Curve25519 and M383 elliptic curves.
ABY
C
AY
and ABY
C
Y
. We use ABY (Demmler et al.,
2015) parameters of the original paper (J
¨
arvinen
et al., 2019): bits = 64, secparam = 128. In
other words, the values domain is 2
64
and the sym-
metric security key length is 128 bits.
CatNap. We instantiate DPDZ2k and Tinier with the
security parameter of 64 bits, and plaintext values
of SPDZ2k consist of 64 bits. The statistical se-
curity parameter for edaBits is 40.
We do not include the performance of clients in
our benchmarks of CatNap since it is negligible; as
can be seen on Figures 5 and 4, the total communica-
tion cost for each client does not exceed 2(3σ+4k +
1) bits (which is 51 bytes for k = 20 and σ = 40),
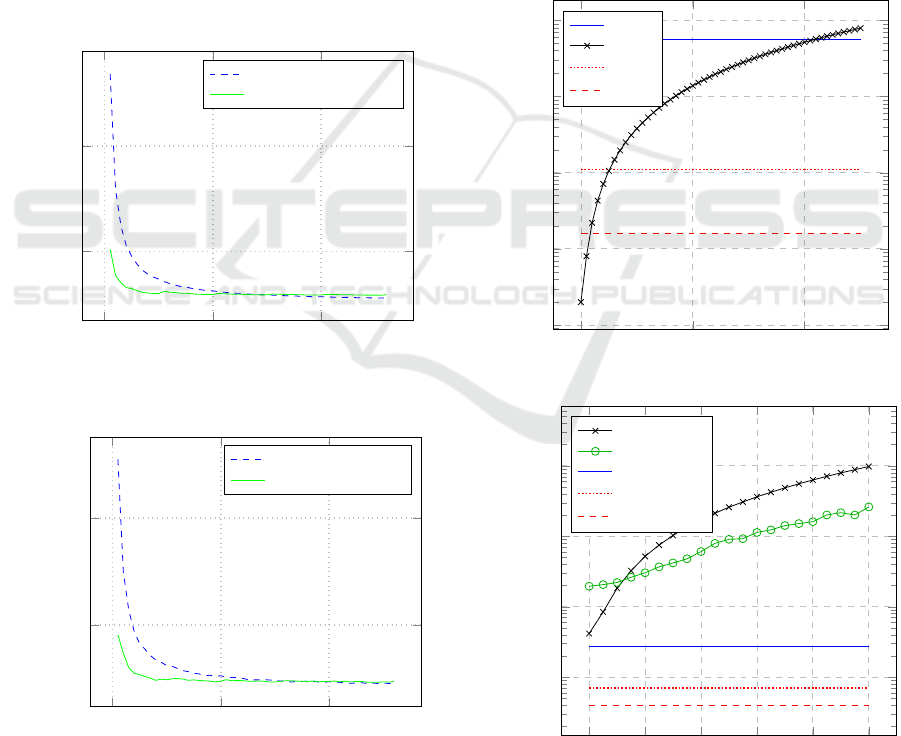
0 2,000 4,000
10
20
Number of repetitions
Total communication [MB]
Communication for B = 4
Communication for B = 5
(a) Total communication
0 2,000 4,000
0.05
0.1
Number of repetitions
Wall-clock running time [s]
Running time for B = 4
Running time for B = 5
(b) Running time
Figure 6: Amortized performance of CatNap by the number
of repetitions.
and the computation cost constitutes a small number
of Boolean operations.
Figure 6 shows the amortized performance of
server in CatNap depending on the number of times
the protocol is executed. These measurements include
both setup time and the actual protocol execution. As
the number of repetitions approaches 4000, the amor-
tized execution time reaches 0.03 seconds, and the to-
tal communication cost reaches 5.6 MB. We use these
two numbers as constants in the next plots, where we
compare CatNap to other protocols. The B parameter
present on the plots is internal to the edaBits; smaller
values of B are expected to provide better asymptotic
performance.
The performance of OLIC depends on the specific
value used for the radius R, this is reflected in the mea-
surements presented on Figure 7. The protocols that
0
200 400
10
0
10
1
10
2
10
3
10
4
Radius R
Total communication [KB]
CatNap
OLIC
ABY
C
Y
ABY
C
AY
0 20 40
60
80 100
10
−2
10
−1
10
0
10
1
Radius R
Wall-clock running time [s]
OLIC servers
OLIC clients
CatNap servers
ABY
C
Y
clients
ABY
C
AY
clients
Figure 7: Comparison of CatNap with OLIC, ABY
C
Y
and
ABY
C
AY
.
SECRYPT 2022 - 19th International Conference on Security and Cryptography
244

have performance independent of R are shown there
as straight horizontal lines. Notably, CatNap is less
efficient than ABY
C
AY
and ABY
C
Y
(we consider it a
minor price to pay since CatNap achieves active secu-
rity), but it still becomes more efficient than OLIC for
large enough values of R.
5 RELATED WORK
Zhong et al. (Zhong et al., 2007) propose the Louis,
Lester and Pierre protocols for location proximity.
The Louis protocol computes the distance between
Alice and Bob using additively homomorphic encryp-
tion. It relies on a third party to perform the PT, and
Bob must be present online to perform the PT. The
Lester protocol does not use a third party but rather
than performing PT computes the actual distance be-
tween Alice and Bob. The Pierre protocol divides the
space into a grid of cells and reveals the cell distance
between Alice and Bob. All three protocols are only
passively secure.
Narayanan et al. (Narayanan et al., 2011) present
protocols for PT. They cast the PT problem as equality
testing on a grid system of hexagons. One of the pro-
posed protocols utilizes an oblivious server. Parties in
this protocol use symmetric encryption, which leads
to better performance. However, this requires having
preshared keys among parties, which is less amenable
to one-to-many PT. Saldamli et al. (Saldamli et al.,
2013) build on the protocol with the oblivious server
and suggest optimizations based on properties from
geometry and linear algebra. Nielsen et al. (Nielsen
et al., 2012) and Kotzanikolaou et al. (Kotzanikolaou
et al., 2016) also propose grid-based solutions.
Hide&Crypt by Freni et al. (Freni et al., 2010)
splits proximity into two steps. First, it performs fil-
tering between a third party and the initiating princi-
pal. Second, the two principals execute computation
to achieve finer granularity. In both steps, the gran-
ule in which a principal is located is sent to the other
party. C-Hide&Hash by Mascetti et al. (Mascetti
et al., 2011) is a centralized protocol, where the prin-
cipals do not need to communicate pairwise but oth-
erwise share many aspects with Hide&Crypt. Friend-
Locator by
ˇ
Sik
ˇ
snys et al. (Siksnys et al., 2009) is a
centralized protocol where clients map their positions
to different granularities, similarly to Hide&Crypt,
but instead of refining via the second principal, each
iteration is done via the third party. VicinityLocator
also by
ˇ
Sik
ˇ
snys et al. (Siksnys et al., 2010) is an ex-
tension of FriendLocator, which allows the proximity
of a principal to be represented not only in terms of
any shape.
ˇ
Sed
ˇ
enka and Gasti (Sedenka and Gasti, 2014) ho-
momorphically compute distances using the UTM
projection, ECEF (Earth-Centered Earth-Fixed) coor-
dinates, and the Haversine formula that makes it pos-
sible to consider the curvature of the Earth. Hallgren
et al. (Hallgren et al., 2015) introduce InnerCircle for
parallelizable decentralized PT, using additively ho-
momorphic encryption between two parties that must
be online. The MaxPace (Hallgren et al., 2016) proto-
col builds on the speed constraints of an InnerCircle-
style protocol as to limit the effects of trilateration
attacks. Polakis (Polakis et al., 2015) study differ-
ent distance and proximity disclosure strategies em-
ployed in the wild and experiment with practical ef-
fects of trilateration.
Sakib and Huang (Sakib and Huang, 2016) ex-
plore PT using elliptic curves. They require Alice
and Bob to be online to be able to run the proto-
col. J
¨
arvinen et al. (J
¨
arvinen et al., 2019) design ef-
ficient schemes for Euclidean distance-based privacy-
preserving location proximity, as well as schemes for
polygon-based matching. They demonstrate perfor-
mance improvements over InnerCircle. Yet the re-
quirement of the two parties being online applies to
their setting as well. Hallgren et al. (Hallgren et al.,
2017) show how to leverage PT for endpoint-based
ridesharing, building on the InnerCircle protocol, and
compare this method with a method of matching tra-
jectories. Oleynikov et al. (Oleynikov et al., 2020)
build OLIC, a natural extension of InnerCircle to
the two-server setting to perform Euclidean distance-
based matching. They also propose the “napping
party” model with two servers that formalizes the pos-
sibility for parties to submit their locations at indepen-
dent moments of time. The “napping party” setting
requires that the clients communicate with servers at
disjoint intervals of time and that they do not share
any secret data (e.g. cryptographic keys) before the
protocol starts. It is necessary to have at least two
servers to achieve this property. As shown by Hal-
levi et al. (Halevi et al., 2011), using one server for
this purpose will leak the clients’ data to it. Further
works on generic MPC in client-server settings (Jar-
rous and Pinkas, 2013; Gordon et al., 2013; Halevi
et al., 2017; Beimel et al., 2014; Benhamouda et al.,
2017) also consider one-server scenarios. Some of
these protocols are mentioned in Table 1.
The main challenge of Euclidean distance-based
PT is efficiently combining the arithmetic operations
(like computing the squared distance) with the com-
parison operation; many existing tools for multiparty
computation tend to be efficient only for one of the
two kinds of operations, and performing the other
one introduces great overhead. To overcome this, we
CatNap: Leveraging Generic MPC for Actively Secure Privacy-enhancing Proximity Testing with a Napping Party
245

use state-of-the-art MPC techniques: SPDZ2k proto-
col for arithmetic computation (Cramer et al., 2018),
Tinier (Frederiksen et al., 2015) for Boolean compu-
tation and edaBits (Escudero et al., 2020) for convert-
ing values between Boolean and arithmetic domains.
In the wake of the COVID-19 pandemic, privacy-
preserving PT witness a boom of protocols that rely
on Bluetooth communication (Troncoso et al., 2020).
These solutions realize PT without relying on know-
ing the exact location of clients. Such solutions are
effective only for shorter radius (Bluetooth range) and
the distance between users cannot be accurately com-
puted (e.g., signal strength varies in the presence of
physical barriers and with weather conditions). In
contrast, this work does not rely on a specific tech-
nology (e.g., Bluetooth communication) and aims at
providing precise matching using the Euclidean dis-
tance. Protocol-based solutions which are the focus
on this work aim to privately implement the partial
functionality of global services like social networks,
messengers and taxi services.
To summarize, most (Zhong et al., 2007; Siksnys
et al., 2009; Siksnys et al., 2010; Freni et al., 2010;
Narayanan et al., 2011; Saldamli et al., 2013; Sedenka
and Gasti, 2014; Hallgren et al., 2015; Oleynikov
et al., 2020; Hallgren et al., 2016; Sakib and Huang,
2016; J
¨
arvinen et al., 2019) of the existing approaches
to proximity testings require both parties to be on-
line or requires clients to share common keys before
the protocol starts, thus not being suitable for one-
to-many matching, and also provide only passive se-
curity, limiting the practical applicability of the pro-
tocol. A notable exception to the work above is the
C-Hide&Hash protocol by Mascetti et al. (Mascetti
et al., 2011), which allows one-to-many testing, yet
at the price of not computing the precise proximity
result but its grid-based approximation. Generally, a
large number of approaches (Zhong et al., 2007; Sik-
snys et al., 2009; Siksnys et al., 2010; Freni et al.,
2010; Mascetti et al., 2011; Narayanan et al., 2011;
Nielsen et al., 2012; Kotzanikolaou et al., 2016) resort
to grid-based approximations, thus losing precision of
proximity tests.
6 CONCLUSION
We presented CatNap, a secure and privacy-
enhancing protocol for PT, which performs exact
Euclidean distance-based matching. CatNap solves
some of the major issues previous similar works suf-
fered from: its performance does not depend on the
proximity radius; it is secure against active adver-
saries; and it does not require clients to be simultane-
ously online for the PT to run. Our evaluation results
confirm that the amortized performance of CatNap is
practical: the running time per repetition is close to
negligible, and the communication cost is around a
few megabytes.
Our approach is trivially augmentable to support
time-based matching (Pagnin et al., 2019), i.e. to al-
low clients to submit the time interval during which
they plan to be in the specified location and make the
protocol match them only if the locations are close
and the time intervals intersect. This can be use-
ful for friend-finding services as well as taxi appli-
cations (e.g. BlaBlaCar (Bla, 2022)), where drivers
need to pick up the passengers at the right time (and
get the actual passenger location if the matching suc-
ceeded). We also allow one-to-many matching via the
“napping party” feature, since the servers can reuse
Alice and Bob’s locations multiple times. For exam-
ple, Bob can submit his location to the servers and
let them match him with any of his friends, yielding
a single bit of the result or a list of all of his friends
who are nearby. In the case of one-to-many matching,
the overhead of our approach will grow linearly in the
number of clients for the servers and stay constant for
the clients. Also, since the protocol already relies on
one of the servers being honest, this fact can be used
to implement a fine-grained policy to control whom
a certain client can be matched with, track the exact
time when the client has submitted their location to
the servers (to show the other clients how fresh it is),
or let the client see who requested matching with them
while they were offline; these features are orthogonal
to our work and are dependent on a specific applica-
tion scenario.
CatNap can be easily generalized to use more than
two servers, so that it stays secure as long as at least
one of the servers is honest. This significantly weak-
ens the security assumption it depends on, making the
protocol more reliable at a cost of some performance
overhead. Since the real-life purpose of having two
servers was to allow distributing trust between two
independent organizations that are providing the LBS
together, distributing it over a larger number of orga-
nizations makes breaking it harder.
We leave a more extensive evaluation of CatNap’s
performance in the presence of realistic network la-
tency for the future work, as well as the evaluation of
time-based matching.
ACKNOWLEDGMENTS
This work was partially supported by the Wallen-
berg AI, Autonomous Systems and Software Program
SECRYPT 2022 - 19th International Conference on Security and Cryptography
246

(WASP) funded by the Knut and Alice Wallenberg
Foundation, the Swedish Foundation for Strategic Re-
search (SSF), the Swedish Research Council (VR),
and the Excellence Center at Link
¨
oping – Lund in In-
formation Technology (ELLIIT).
REFERENCES
Beimel, A., Gabizon, A., Ishai, Y., Kushilevitz, E.,
Meldgaard, S., and Paskin-Cherniavsky, A. (2014).
Non-interactive secure multiparty computation. In
CRYPTO, LNCS.
Benhamouda, F., Krawczyk, H., and Rabin, T. (2017). Ro-
bust non-interactive multiparty computation against
constant-size collusion. In CRYPTO, LNCS.
Bla (2022). BlaBlaCar - Trusted carpooling. https://www.
blablacar.com/.
Canetti, R. (1998). Security and composition of multi-party
cryptographic protocols. ePrint. https://eprint.iacr.org/
1998/018.
Cole, S. (2019). Yahoo engineer used insider
access to get private photos of women.
https://www.vice.com/en/article/59nwyk/yahoo-
engineer-used-insider-access-to-get-private-photos-
of-women. [Online; accessed 22-Mar-2022].
Cox, J. (2019). Snapchat employees abused data ac-
cess to spy on users. https://www.vice.com/en/
article/xwnva7/snapchat-employees-abused-data-
access-spy-on-users-snaplion. [Online; accessed
22-Mar-2022].
Cox, J. and Hoppenstedt, M. (2018). Sources: Face-
book has fired multiple employees for snooping
on users. https://www.vice.com/en/article/bjp9zv/
facebook-employees-look-at-user-data. [Online; ac-
cessed 22-Mar-2022].
Cramer, R., Damg
˚
ard, I., Escudero, D., Scholl, P., and Xing,
C. (2018). Spdz2k: Efficient mpc mod 2
k
for dishon-
est majority. In CRYPTO.
Demmler, D., Schneider, T., and Zohner, M. (2015). ABY -
A framework for efficient mixed-protocol secure two-
party computation. In NDSS.
Escudero, D., Ghosh, S., Keller, M., Rachuri, R., and
Scholl, P. (2020). Improved primitives for mpc over
mixed arithmetic-binary circuits. In CRYPTO.
Frederiksen, T. K., Keller, M., Orsini, E., and Scholl, P.
(2015). A unified approach to mpc with preprocessing
using ot. In ASIACRYPT.
Freni, D., Vicente, C. R., Mascetti, S., Bettini, C., and
Jensen, C. S. (2010). Preserving location and absence
privacy in geo-social networks. In CIKM.
Gordon, S. D., Malkin, T., Rosulek, M., and Wee, H.
(2013). Multi-party computation of polynomials and
branching programs without simultaneous interaction.
In EUROCRYPT, LNCS. Springer.
Halevi, S., Ishai, Y., Jain, A., Komargodski, I., Sahai, A.,
and Yogev, E. (2017). Non-interactive multiparty
computation without correlated randomness. In ASI-
ACRYPT, LNCS.
Halevi, S., Lindell, Y., and Pinkas, B. (2011). Secure com-
putation on the web: Computing without simultane-
ous interaction. In CRYPTO.
Hallgren, P., Orlandi, C., and Sabelfeld, A. (2017). Pri-
vatePool: Privacy-Preserving Ridesharing. In CSF.
Hallgren, P. A., Ochoa, M., and Sabelfeld, A. (2015).
InnerCircle: A parallelizable decentralized privacy-
preserving location proximity protocol. In PST.
Hallgren, P. A., Ochoa, M., and Sabelfeld, A. (2016). Max-
Pace: Speed-Constrained Location Queries. In CNS.
Hern, A. (2016). Uber employees ’spied on ex-partners,
politicians and beyonc
´
e’. https://www.theguardian.
com/technology/2016/dec/13/uber-employees-
spying-ex-partners-politicians-beyonce. [Online;
accessed 22-Mar-2022].
Jakobsen, T. P., Nielsen, J. B., and Orlandi, C. (2014). A
framework for outsourcing of secure computation. In
ACM CCSW.
Jarrous, A. and Pinkas, B. (2013). Canon-mpc, a system for
casual non-interactive secure multi-party computation
using native client. In WPES. ACM.
J
¨
arvinen, K., Kiss, A., Schneider, T., Tkachenko, O., and
Yang, Z. (2019). Faster privacy-preserving location
proximity schemes for circles and polygons. IET In-
formation Security, 14.
Keller, M. (2020). Mp-spdz: A versatile framework for
multi-party computation. In ACM SIGSAC.
Kotzanikolaou, P., Patsakis, C., Magkos, E., and Korakakis,
M. (2016). Lightweight private proximity testing for
geospatial social networks. Computer Communica-
tions.
Lindell, Y. (2016). How to simulate it - a tutorial on the
simulation proof technique. ePrint. https://eprint.iacr.
org/2016/046.
Mascetti, S., Freni, D., Bettini, C., Wang, X. S., and Jajodia,
S. (2011). Privacy in geo-social networks: proximity
notification with untrusted service providers and curi-
ous buddies. VLDB J.
Narayanan, A., Thiagarajan, N., Lakhani, M., Hamburg,
M., and Boneh, D. (2011). Location privacy via pri-
vate proximity testing. In NDSS.
Nielsen, J. D., Pagter, J. I., and Stausholm, M. B. (2012).
Location privacy via actively secure private proximity
testing. In PerCom Workshops. IEEE CS.
Oleynikov, I., Pagnin, E., and Sabelfeld, A. (2020). Where
are you Bob? Privacy-Preserving Proximity Testing
with a Napping Party. In ESORICS.
Oleynikov, I., Pagnin, E., and Sabelfeld, A. (2022). Cat-
nap: Leveraging generic mpc for actively secure
privacy-enhancing proximity testing with a napping
party (extended version). https://www.cse.chalmers.
se/research/group/security/catnap/.
Pagnin, E., Gunnarsson, G., Talebi, P., Orlandi, C., and
Sabelfeld, A. (2019). TOPPool: Time-aware Opti-
mized Privacy-Preserving Ridesharing. PoPETs.
Polakis, I., Argyros, G., Petsios, T., Sivakorn, S., and
Keromytis, A. D. (2015). Where’s wally?: Precise
user discovery attacks in location proximity services.
In CCS.
CatNap: Leveraging Generic MPC for Actively Secure Privacy-enhancing Proximity Testing with a Napping Party
247

Rotaru, D. and Wood, T. (2019). Marbled circuits: Mixing
arithmetic and boolean circuits with active security. In
INDOCRYPT 2019.
Sakib, M. N. and Huang, C. (2016). Privacy preserving
proximity testing using elliptic curves. In ITNAC.
Saldamli, G., Chow, R., Jin, H., and Knijnenburg, B. P.
(2013). Private proximity testing with an untrusted
server. In WISEC. ACM.
Sedenka, J. and Gasti, P. (2014). Privacy-preserving dis-
tance computation and proximity testing on earth,
done right. In AsiaCCS.
Sharemind (2022). Sharemind MPC Platform.
https://sharemind.cyber.ee/sharemind-mpc/multi-
party-computation/.
Siksnys, L., Thomsen, J. R., Saltenis, S., and Yiu, M. L.
(2010). Private and flexible proximity detection in
mobile social networks. In MDM.
Siksnys, L., Thomsen, J. R., Saltenis, S., Yiu, M. L., and
Andersen, O. (2009). A location privacy aware friend
locator. In SSTD.
Troncoso, C., Payer, M., Hubaux, J.-P., Salath
´
e, M.,
Larus, J., Bugnion, E., Lueks, W., Stadler, T., Pyrge-
lis, A., Antonioli, D., et al. (2020). Decentralized
privacy-preserving proximity tracing. arXiv preprint
arXiv:2005.12273.
Zhong, G., Goldberg, I., and Hengartner, U. (2007). Louis,
lester and pierre: Three protocols for location privacy.
In PET.
SECRYPT 2022 - 19th International Conference on Security and Cryptography
248
