
Autonomous Loading of a Washing Machine with a Single-arm Robot
Hassan Shehawy
a
, Andrea Maria Zanchettin
b
and Paolo Rocco
c
Politecnico di Milano, 20133 Milan, Italy
Keywords:
Robotics, Deformable Objects, Image Clustering, Computer Vision.
Abstract:
The perception and autonomous manipulation of clothes by robots is an ongoing research topic that is attracting
a lot of contributions. We consider the application of handling garments for laundry in this work. A framework
for loading a washing machine with clothes placed initially inside a box is presented. Our framework is created
in a modular way to account for the sub-problems associated with the full process. We extend our grasping
point estimation algorithm by finding multiple grasping points and defining a score to select one. Active
contours segmentation is added to the algorithm as well for more robust clustering of the image. Model of the
washing machine is used to create a motion plan for the robot to place the clothes inside the drum. A new
module is added for detection of items fallen outside the drum so to plan corresponding corrective action. We
use ROS, depth and 2D cameras and the Doosan A0509 robot for experiments.
1 INTRODUCTION
Robots have been used in many projects with clothes
for some time now and several works have been pub-
lished with a wide variety of applications. For ex-
ample in (Yamazaki et al., 2010), a robot was used
for tidying a room which included manipulation of
clothes whereas in (Yamazaki et al., 2014) the authors
used a robot for assistance in dressing. The variation
is not only in the application, but also the configura-
tion of the system. If folding clothes is considered
as an application, then a dual-arm robot was used in
(Stria et al., 2014) while a single-arm one was used
in (Petr
´
ık et al., 2017). Using various approaches for
the perception is also noticeable which included the
recognition of clothes and/or their state. Computer vi-
sion was used in many works either using a 2D cam-
era as in (Yamazaki et al., 2011) or a depth camera
as in (Sun et al., 2018). Haptics was also used as in
(Clegg et al., 2017) and hybrid methods have been
used as well in (Yuan et al., 2018) and (Kampouris
et al., 2016).
Finding a grasping point is a fundamental step
prior to the manipulation of clothes and different
methods were used to detect one. In (Willimon et al.,
2011b), a set of possible grasping points were calcu-
lated and an arbitrary one was selected while in other
a
https://orcid.org/0000-0002-8369-8963
b
https://orcid.org/0000-0002-1866-7482
c
https://orcid.org/0000-0001-6716-434X
works, features as wrinkles (Willimon et al., 2011a)
and edges (Ramisa et al., 2011) were extracted. Mod-
eling the grasping process was part of some works as
in (Gil et al., 2016) and meanwhile some other works
didn’t consider it (Mira et al., 2015).
Even though there is a lot of works that have been
published or ongoing, there are many open challenges
to consider. In this paper, we present a full pipeline
for loading a washing machine with clothes placed in-
side a laundry basket. We use a single-arm robot for
the manipulation, 2D and an RGB-D camera for per-
ception. Figure 1 shows the robot placing garments
inside the washing machine.
To consider the full process of loading the wash-
ing machine, we created a modular approach that ac-
counts for the different problems associated with the
process. we extend our grasping point estimation al-
gorithm (Shehawy et al., 2021) by finding curves in
the image that can be bounding garments, possibly ex-
tracting multiple grasping points and defining thresh-
olds for picking one. We use Active Contours for seg-
menting the image for more robust clustering. With
the knowledge of the machine CAD model, a direc-
tion and a set of waypoints are used to create the mo-
tion plan for the loading process. Another module
has been developed to detect if garments fall out of
the drum and a corrective action is taken to put them
back inside the drum. The contribution of this pa-
per is the proposed framework which realizes the au-
tonomous loading of a washing machine. It includes
Shehawy, H., Zanchettin, A. and Rocco, P.
Autonomous Loading of a Washing Machine with a Single-arm Robot.
DOI: 10.5220/0011276200003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 443-450
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
443

Robot successfully grasped an item from a laundry basket and mid-
way to place it inside the washing machine.
Figure 1: Robot loading clothes inside a washing machine.
our extended algorithm for finding a grasping point in
a more robust way using active contours.
The paper is organized as follows. The next sec-
tion explains the framework which includes finding
a set of grasping points and selecting one according
to predefined criteria, creation of motion plan, and
checking the status of the loaded garments. Section
3 discusses the experiments and the practical aspects
of the system which includes the design of the ROS
nodes and the gripper.
2 METHOD
A dedicated framework for loading the washing ma-
chine has been developed and is presented in this sec-
tion. The first part is finding a grasping point and
to this, we focus on finding a continuous area in the
image of the loaded basket and use its centroid as a
grasping point. To account for the possible failures
in the process, we add two modules for detecting and
correcting such situations. The first one is checking
if an item is partially outside the washing machine af-
ter being placed inside the drum. The second one is
checking the floor to see if any item(s) has fallen dur-
ing the process of loading the washing machine.
2.1 Grasping Point
In this work, Active Contours method is used for seg-
mentation, and centroids of clusters (that identify dif-
ferent clothes) are all considered as grasping points.
A set of weights is introduced for assessment of the
points to select one. We use our SW-filter that we
have presented in our previous work(Shehawy et al.,
2021) before the segmentation.
2.1.1 Pre-segmentation
Prior to the segmentation, each pixel in position (x, y)
is given the value:
I(x, y) =
q
P
L
L(x,y)
2
+ P
a
a
∗
(x,y)
2
+ P
b
b
∗
(x,y)
2
where L(x,y), a
∗
(x,y) and b
∗
(x,y) correspond to the
conversion from the RGB to the La*b* (Ganesan
et al., 2010) color space. P
L
, P
a
and P
b
are parame-
ters to allow for the balance of luminance and color
weights for images. Results were very sensitive to the
selection of these parameters, and they were set as P
L
= 4, P
a
= 1.5 and P
b
= 1.5.
2.1.2 Clustering using Active Contours
Active Contours methods rely on the concept of an
energy functional that is minimized to find a curve
of interest inside an image (Kass et al., 1988). The
functional is a combination of two components, one
of them controls the smoothness of the curve and the
other brings the curve closer to the boundary. The
curve is assumed to form a contour around the objects
in the image. It can be represented implicitly as
C = {(x, y)|u(t,x,y) = 0}
and its evolution can be described by the PDE:
∂u
∂t
= F|∇u|
where F represents the speed of the evolution and
may be chosen as the curvature. In this case, the PDE
becomes:
∂u
∂t
= div(
∇u
|∇u|
)|∇u|
where div(
∇u
|∇u|
) stands for the divergence of the nor-
malized gradient which is the curvature calculated on
the level-sets of u.
This approach has been extended in multiple
works like the the Active Contours Without Edges
(ACWE) (Chan and Vese, 2001) and the Geodesic
Active Contours (GAC) (Caselles et al., 1995). We
use the GAC method here where the curve evolution
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
444

based on the energy functional introduced in (Caselles
et al., 1995) is defined as:
∂u
∂t
= g(I)|∇u|div(
∇u
|∇u|
) + ∇u∇g(I)
where g (I) is the function that dictates the regions
of interest in the image and it is usually selected to
highlight the edges in the image. In our work we used
this form:
g(I) =
1
q
1 + α|∇
ˆ
I|
where
ˆ
I is a smoothed image obtained by applying
a Gaussian filter (with standard deviation σ) on the
image I and α is an empirical parameter.
To overcome the problems associated with a
wrong initial guessed curve u
0
or the curve passing
through noisy points that can stop the curve evolu-
tion, the balloon force is added to the functional as
described in (Cohen, 1991) and hence the curve evo-
lution becomes:
∂u
∂t
= g(I)|∇u|div(
∇u
|∇u|
) + ∇u∇g(I) + |∇u|g(I)υ
where υ ∈ R is the parameter for the balloon force.
Replacing differential operators with morpholog-
ical ones helps in decreasing the numerical and
computational complexity associated with solving
PDEs as introduced in (Marquez-Neila et al., 2014)
which presents a full framework for implementing the
ACWE and GAC using morphological operations. To
reduce the time associated with this step, we adopt
this technique of implementing the GAC method.
2.1.3 Post-segmenting
An initial level set of a circle with a small radius was
used and running the segmentation with that initial
curve at different points could cluster the different
garments in the image. These clusters can be com-
bined together into one segmented image as shown in
Figure 2 where three garments are successfully seg-
mented. To complete the segmentation step and ad-
dress some possible problems, we perform this extra
step: for every pair of clusters (C
i
and C
j
), the in-
tersection (C
i j
= C
i
∩C
j
) is calculated and a ratio η
is defined as an intersection threshold (set at 0.95).
Then the number of elements in the clusters and their
intersection is computed and:
• if n(C
i j
)/n(C
i
) > η and n(C
i j
)/n(C
j
) > η, they
are combined into one cluster.
• if n(C
i j
)/n(C
i
) > η and n(C
i j
)/n(C
j
) < η, the me-
dian values of the clusters are computed. If the
difference between them is small, the two clusters
Input image of clothes (left) and the result of applying our SW-
filter (right) are in first row. Running MGAC clustering at different
points gave the results in second and third (left) rows while the
combination of the clusters is shown in the third row (right).
Figure 2: Image Clustering using MGAC.
are combined into one. An example of this case
is shown in Figure 3 (upper row). Otherwise, we
have two clusters; one of them is the smaller clus-
ter and the other is the difference between the two
clusters. An example of this case is shown in Fig-
ure 3 (lower row).
2.1.4 Weights of Grasping Points
The main criterion for selecting a grasping point is
the area of the cluster. However, two more criteria are
added to consider other factors in selecting the point:
• Normal distances from the horizontal and vertical
edges, w
eh
and w
ev
. These weights are corrected
by scaling the distance to the longer edge by a fac-
tor (we chose it as the ratio of the longer to the
smaller edge). This is illustrated in Figure 4 (on
the left).
• Euclidean distance from the center of the basket,
w
rc
. We consider the reciprocal of the distance as
a weight so that the closer the point to the center,
the higher the weight. This is illustrated in Figure
4 (on the right).
The final weight is the sum of the normalized weights
w
rc
, w
eh
and w
ev
. The detected clusters are sorted ac-
cording to their area and the largest one is considered
for grasping. However, if multiple clusters have an
Autonomous Loading of a Washing Machine with a Single-arm Robot
445

Two examples of intersection of two clusters where analysis is
needed. In upper row, the smaller cluster (right) is indeed part
of the bigger one (left). In the lower row, this is not the case and it
is an independent cluster.
Figure 3: MGAC Segmentation Intersection.
Distance from the edges (left) is one criterion for a grasping point
while distance from the center (right) is another one.
Figure 4: Weights of Grasping Points.
area > 40 cm
2
, we use the weight defined here to se-
lect a point.
2.2 Checking for Items Partly Outside
the Drum
The first inspection is to check if the loading process
was indeed successful in terms of placing the item
completely inside the drum and making sure that no
part of it is still outside the drum. For this we detect
the drum opening by finding two circles in the im-
age using Hough Transform (Yuen et al., 1990). To
ensure that the correct circle is detected, we place a
fiduciary marker (AprilTag (Wang and Olson, 2016))
at a known position relative to the drum center. A re-
gion of interest (ROI) is created as the disk between
the smaller and larger circle. Figure 5 shows two ex-
amples for this process where the two circles and the
disk of interest are highlighted.
To check this region, we convert the image from
the Cartesian space into the log-polar one. This is
done using the following equation:
ρ = log(
q
(x − x
c
)
2
+ (y − y
c
)
2
)
Region Of Interest (ROI) is created to check if an item is partially
outside the washing machine. Two examples are shown here with
a dark color (right) and a more challenging bright color (left) .
Figure 5: Inspection of the outer part of the drum.
and
θ = tan
−1
y − y
c
x − x
c
where x
c
and y
c
are the center coordinates in the
Cartesian space. In the new space, the curved area of
interest is now a rectangular patch in the image. This
requires the correct positioning of the center of the
transformation which is set as the center of the drum.
Figure 6 (a) shows the output of this transformation
applied to the images in Figure 5.
Prior to the loading process, an image I
◦d
is cap-
tured for the washing machine when the drum is
empty and used as a reference to compare against it.
For a new image I, the difference |I − I
◦d
| is calcu-
lated and in this difference image pixels with values
less than a threshold (set at 50) are ignored. Figure 6
(b) shows the ROI and difference images for the setup
in Figure 5.
2.3 Checking for Items Fallen on the
Floor
We use the same idea here as well by having an image
I
◦ f
for the floor before the loading process. However,
here we find the difference for a new image I |I −I
◦ f
|,
using the HSV (Sural et al., 2002) color space. To
adjust for the possible variations of the garments col-
ors, we calculate the difference in the hue and value
channels of the HSV. In some cases, the difference
in the hue channel is very small and will not lead to
identification of fallen items. In other cases, this can
happen in the value channel as well and therefore, we
consider the larger value. Figure 7 shows an exam-
ple for two items where the hue difference gave better
results in one case and the value difference showed
better results in the other one. We apply morpholog-
ical closing on the difference image and then find the
largest connected component that represents the item
on the floor as shown in Figure 7.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
446
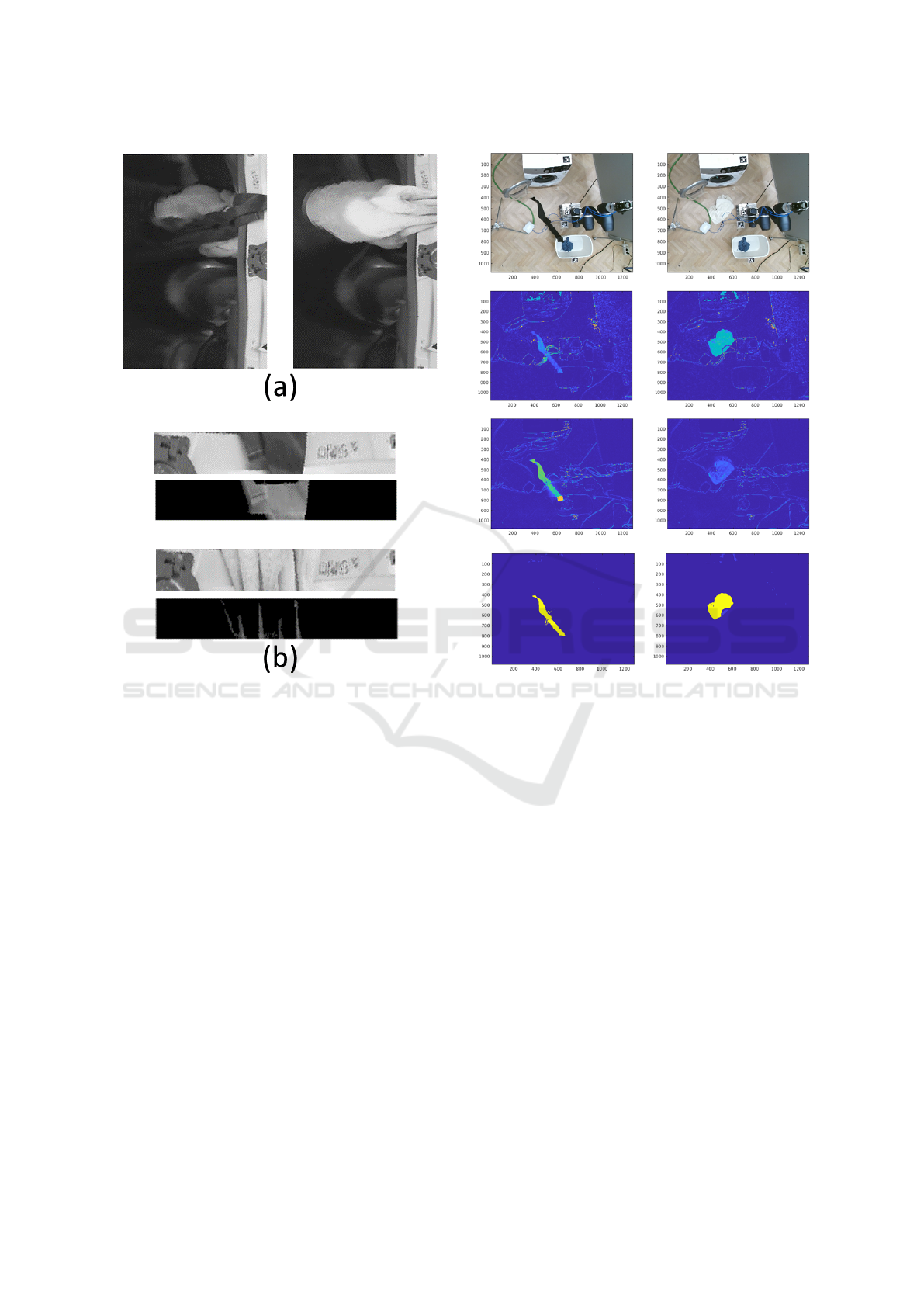
Images from Figure 5 are transformed to log-polar space in (a). In
(b), both the ROI and difference images are shown. ROI image
is the disk between the inner and outer circle of the drum. Dif-
ference image is obtained based on an initial image taken before
the loading process. For dark objects, detection is easier because
the contrast against the white surface is higher (as in upper two
images). For bright ones, it is more challenging as the contrast is
lower. However, the wrinkles are helpful in recognizing the gar-
ment (as in lower two images).
Figure 6: Analyzing the drum images.
2.4 Planning Robot Movements
For an efficient grasping, fingers need to create some
wrinkles/creases when they close. This is more proba-
ble and effective when the gripper reaches the clothes
vertically. To do this we define a point that is shifted
upwards from the grasping point by 10 cm and move
the arm from it to the grasping point. After the grip-
per closes, the arm will not move immediately to
the washing machine, but above the basket so that a
grasped item would fall inside the basket if it slips.
When the arm is placing an item inside the drum,
a path is designed to make the robot push down the
clothes already within the drum in a coherent way.
Images of the floor captured after the loading process to check for
any fallen item(s). Raw images are shown in the first row. The
second and third rows show the difference with images of floor
before the loading process in the hue channel of the HSV and the
saturation channel. Fourth row show the extraction of the largest
component that corresponds to the fallen garment.
Figure 7: Floor Inspection.
With the washing machine CAD model, locating the
drum center can be done using an AprilTag with
known position relative to the washing machine. Fig-
ure 8 (left) shows the washing machine model, the
drum axis and the AprilTag. A point is defined with
respect to the drum center as a pre-entry point for the
robot. Figure 8 (middle) shows this point. The path is
generated from that point to the drum taking into con-
sideration collision avoidance with the drum. Figure
8 (right) shows the robot inside the drum.
If an item is detected as partially outside the drum,
the robot moves to the detected item, grasps it and
then moves up towards the drum center and then in-
side it. Figure 9 shows an example of a sequence of
placing an item back into the drum.
Autonomous Loading of a Washing Machine with a Single-arm Robot
447

The detection of the AprilTag placed on top of the washing ma-
chine allows for finding the location of the center of the drum with
the knowledge of the washing machine CAD model. The direc-
tion of the AprilTag x-axis (in red) also dictates the direction of
the drum central axis (left). The actual pre-entry point (middle)
and inside the drum one (right) are shown for the robot with the
grasped item.
Figure 8: Washing Machine Drum Axis.
After checking if there’s partial fall on the drum, the robot moves
item into the drum.
Figure 9: Robot moving item inside the drum.
3 EXPERIMENTS
We use the Doosan A0509 collaborative robot, Kinect
V2 depth camera and Microsoft LifeCam camera.
Figure 10 shows the system components which is the
used setup in our simulation environment. For im-
plementing the framework, we used ROS (Quigley
et al., 2009) Melodic and the PCL library (Rusu and
Cousins, 2011) for handling the point cloud captured
All system components (including washing machine, laundry bas-
ket, the robot and the cameras) in the simulation inside rviz.
Figure 10: Simulation Setup.
from the Kinect camera. The generation of trajecto-
ries was done using MoveIt (Coleman et al., 2014)
and for execution, it was communicated to the Doosan
motion controller. The dimensions of the laundry bas-
ket and the CAD model of the washing machine are
assumed to be known. This information was included
into our URDF model but the location and orienta-
tion of them can be adjusted based on the AprilTag
attached to the basket and the washing machine.
Clothes were randomly thrown into the basket and
the robot could successfully grasp the items and place
them inside the drum. We had 8 garments in to-
tal varying in size, color and texture. They were
put in random configurations 5 times and the load-
ing pipeline was tested. We had 34 loading attempts
where a loading attempt is defined as a complete ex-
ecution of the pipeline starting from identifying a
grasping point and ending by releasing the garment
inside the drum. Out of the 34 loading attempts we
had:
• 18 completely successfully attempts. Complete
success is defined as placing the garment com-
pletely inside the drum
• 11 partially successfully attempts. Partial success
is defined as placing the garment inside the drum
while part of it is partially outside the drum.
• 5 failed attempts. Failed attempt corresponds to
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
448
the cases when garments fall on the floor.
The partially successfully and failed attempts
cases were mostly related to the large items like
trousers or big towels. However, with the two mod-
ules for checking the drum and the floor, the garments
could be placed inside the drum.
We created two ROS packages; one for the per-
ception and the other for planning and executing the
movements. The perception package included the fol-
lowing nodes:
• ROI-Creation Nodes: extracting the clothes in-
side laundry basket and the drum opening. These
nodes published the cropped images.
• Inspection Nodes: checking the drum if an item
is out and another for checking the floor. These
nodes publish a boolean message (there is an item
to grasp or not).
• Grasping-Points Nodes: finding a grasping point
in the laundry basket, on the drum edge and on
the floor (if items were detected). These nodes
publish a 3D point in the end-effector frame.
The planning package included the following nodes:
• Loading Node: it subscribes to the grasping point
message and creates a motion plan for grasping
clothes, moving upwards above the basket and
then into the drum passing by the pre-entry point.
• Corrections Nodes: they subscribe to the inspec-
tion nodes boolean messages. If a correction is
needed, they move the robot to a grasping point
and either puts the partially-out item back into
drum or the fallen item on the floor into the wash-
ing machine.
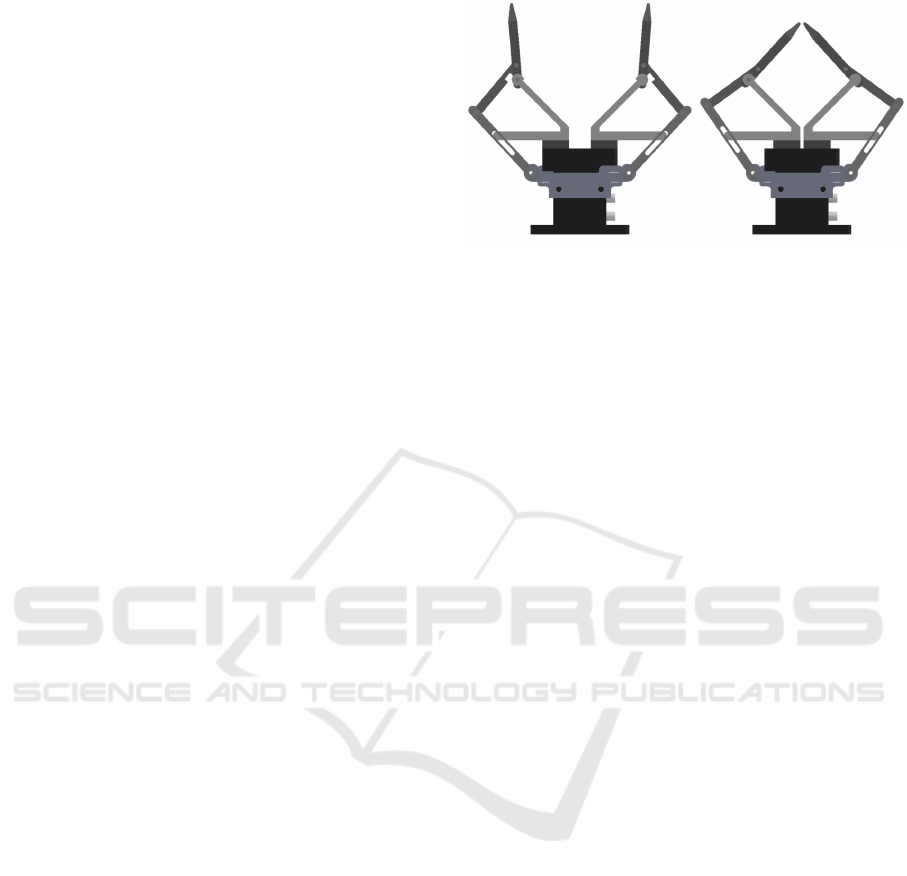
We use the Camozzi CGPS pneumatic gripper for
grasping the clothes. However, the maximum aper-
ture is very small (2 cm) does not give satisfactory re-
sults as it only works with clothes of small sizes and
rough surfaces when there is enough friction force.
But for the general case, wrinkles have to be formed
inside the gripper to get a reliable grasping. To do
this, we designed the gripper shown in Figure 11 that
uses linkages for converting linear motion to rotary
one and thus extends the maximum aperture.
A demonstration for the loading sequence
and recovery modules can be viewed here:
https://www.youtube.com/watch?v=rK4GwbaqT8Q
4 CONCLUSIONS
Using our proposed framework it was possible to
autonomously load a washing machine with clothes
placed inside a basket. Our framework is modular
Fingers attached to the pneumatic gripper with this mechanism
created better grasping and grip .
Figure 11: Gripper in open/close positions.
in its design to allow for the recovery of failures,
when needed. Active Contours showed robust clus-
tering of the image without prior knowledge of the
number or colors of items in the basket or even an
estimate number of it. Despite the incomplete clus-
tering of the image in some cases, clusters were cre-
ated and a grasping point was found. More complete
clustering could be achieved by adding more points
for the initial curve. However this would add to the
runtime and complexity of the work and such a com-
plete clustering of the image is not needed as the main
objective is to find at least one continuous area to
consider for grasping which could be achieved using
fewer number of points. The grasped item(s) could be
placed inside the drum and when this failed, the re-
covery modules for drum and floor checking ensured
the completion of the loading. Most of the failures
were associated with big or heavy items that either
slipped from the robot or were not completely placed
inside the drum. A deeper grasp could be achieved by
shifting the grasping point downwards by a few cen-
timeters. This resulted in more success by having a
firm grip but also increased the probability of grasp-
ing other item(s) that could be below it which could
result in falling the items on the ground. Again, this
kind of failure could be recovered by our floor inspec-
tion module.
Possible extensions for this work can rely on ma-
chine learning to detect a grasping point and use Dy-
namical Movement Primitives (DMP) to learn a tra-
jectory for the loading process. Multi-fingers gripper
can also be utilized for more robust and firm grasping.
REFERENCES
Caselles, V., Kimmel, R., and Sapiro, G. (1995). Geodesic
active contours. In IEEE International Conference on
Computer Vision, pages 694—-699.
Autonomous Loading of a Washing Machine with a Single-arm Robot
449

Chan, T. and Vese, L. (2001). Active contours with-
out edges. IEEE Transactions on Image Processing,
10(2), pages 266—-277.
Clegg, A., Yu, W., Erickson, Z., Tan, J., Liu, C., and Turk,
G. (2017). Learning to navigate cloth using haptics. In
IEEE International Conference on Intelligent Robots
and Systems, pages 2799–2805. Institute of Electrical
and Electronics Engineers Inc.
Cohen, L. D. (1991). On active contour models and bal-
loons. CVGIP: Image Understanding, vol. 53, no. 2,
pages 211–218.
Coleman, D., Sucan, I., Chitta, S., and Correll, N. (2014).
Reducing the barrier to entry of complex robotic soft-
ware: a moveit! case study. pages 1–14.
Ganesan, P., Rajini, V., and Rajkumar, R. (2010). Segmen-
tation and edge detection of color images using cielab
color space and edge detectors. In International Con-
ference on ”Emerging Trends in Robotics and Com-
munication Technologies”, INTERACT-2010. IEEE.
Gil, P., Mateo, C. M., Delgado,
´
A., and Torres, F. (2016).
Visual/Tactile sensing to monitor grasps with robot-
hand for planar elastic objects. 47th International
Symposium on Robotics, ISR 2016, 2016:439–445.
Kampouris, C., Mariolis, I., Peleka, G., E. Skartados, E.,
Kargakos, A., Triantafyllou, D., and Malassiotis, S.
(2016). Multi-sensorial and explorative recognition
of garments and their material properties in uncon-
strained environment. In IEEE International Con-
ference on Robotics and Automation (ICRA), pages
1656–1663. IEEE.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1(4), pages 321—-331.
Marquez-Neila, P., Baumela, L., and Alvarez, L. (2014). A
morphological approach to curvature-based evolution
of curves and surfaces. In IEEE Transactions on Pat-
tern Analysis and Machine Intelligence, 36(1), pages
2—-17.
Mira, D., Delgado, A., Mateo, C. M., Puente, S. T., Can-
delas, F. A., and Torres, F. (2015). Study of dexter-
ous robotic grasping for deformable objects manipu-
lation. 2015 23rd Mediterranean Conference on Con-
trol and Automation, MED 2015 - Conference Pro-
ceedings, pages 262–266.
Petr
´
ık, V., Smutn
´
y, V., Krsek, P., and Hlav
´
a
ˇ
c, V. (2017).
Single arm robotic garment folding path generation.
Advanced Robotics, 31(23-24):1325–1337.
Quigley, M., Gerkey, B., Conley, K., Faust, J., Foote, T.,
Leibs, J., Berger, E., Wheeler, R., and Ng, A. (2009).
Ros: an open-source robot operating system. In IEEE
Intl. Conf. on Robotics and Automation (ICRA) Work-
shop on Open Source Robotics.
Ramisa, A., Alenya, G., Moreno-Noguer, F., and Torras, C.
(2011). Determining where to grasp cloth using depth
information. Frontiers in Artificial Intelligence and
Applications, 232:199–207.
Rusu, R. B. and Cousins, S. (2011). 3d is here: Point cloud
library (pcl). In IEEE International Conference on
Robotics and Automation, pages 19–22.
Shehawy, H., Rocco, P., and Zanchettin, A. (2021). Estimat-
ing a garment grasping point for robot. In 20th Inter-
national Conference on Advanced Robotics (ICAR).
IEEE.
Stria, J., Prusa, D., Hlavac, V., Wagner, L., Petrik, V., Krsek,
P., and Smutny, V. (2014). Garment perception and
its folding using a dual-arm robot. IEEE Interna-
tional Conference on Intelligent Robots and Systems,
(September):61–67.
Sun, L., Aragon-Camarasa, G., Rogers, S., and Siebert,
J. P. (2018). Autonomous Clothes Manipulation Us-
ing a Hierarchical Vision Architecture. IEEE Access,
6(October):76646–76662.
Sural, S., Qian, G., and Pramanik, S. (2002). Segmentation
and histogram generation using the hsv color space for
image retrieval. In IEEE International Conference on
Image Processing, pages 589–592.
Wang, J. and Olson, E. (2016). Apriltag 2: Efficient and ro-
bust fiducial detection,. In IEEE International Confer-
ence on Intelligent Robots and Systems, pages 4193—
-4198.
Willimon, B., Birchfield, S., and Walker, I. (2011a). Clas-
sification of clothing using interactive perception. In
IEEE International Conference on Robotics and Au-
tomation, pages 1862–1868.
Willimon, B., Birchfield, S., and Walker, I. (2011b). Model
for unfolding laundry using interactive perception. In
EEE International Conference on Intelligent Robots
and Systems, pages 4871–4876. IEEE.
Yamazaki, K., Nagahama, K., and Inaba, M. (2011). Daily
clothes observation from visible surfaces based on
wrinkle and cloth-overlap detection. Proceedings of
the 12th IAPR Conference on Machine Vision Appli-
cations, MVA 2011, pages 275–278.
Yamazaki, K., Oya, R., Nagahama, K., Okada, K., and In-
aba, M. (2014). Bottom dressing by a life-sized hu-
manoid robot provided failure detection and recovery
functions. 2014 IEEE/SICE International Symposium
on System Integration, SII 2014, pages 564–570.
Yamazaki, K., Ueda, R., Nozawa, S., Mori, Y., Maki, T.,
Hatao, N., Okada, K., and Inaba, M. (2010). Sys-
tem integration of a daily assistive robot and its ap-
plication to tidying and cleaning rooms. IEEE/RSJ
2010 International Conference on Intelligent Robots
and Systems, IROS 2010 - Conference Proceedings,
pages 1365–1371.
Yuan, W., Mo, Y., Wang, S., and Adelson, E. H. (2018).
Active clothing material perception using tactile sens-
ing and deep learning. In IEEE International Con-
ference on Robotics and Automation (ICRA), pages
4842–4849. IEEE.
Yuen, H., Princen, J., Illingworth, J., and Kittler, J.
(1990). Comparative study of hough transform meth-
ods for circle finding. Image and Vision Computing,
8(1):7177.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
450
