
Feature Extraction and Failure Detection Pipeline Applied to Log-based
and Production Data
Rosaria Rossini
1 a
, Nicol
`
o Bertozzi
1 b
, Eliseu Pereira
2 c
, Claudio Pastrone
1 d
and Gil Gonc¸alves
2 e
1
LINKS Foundation, Turin, Italy
2
SYSTEC, Research Center for Systems and Technologies, Faculty of Engineering, University of Porto, Porto, Portugal
Keywords:
Predictive Maintenance, Machine Learning, Feature Engineering, Manufacturing, Log Data, Drilling.
Abstract:
Machines can generate an enormous amount of data, complemented with production, alerts, failures, and
maintenance data, enabling through a feature engineering process the generation of solid datasets. Modern
machines incorporate sensors and data processing modules from factories, but in older equipment, these de-
vices must be installed with the machine already in production, or in some cases, it is not possible to install
all required sensors. In order to overcome this issue, and quickly start to analyze the machine behavior, in
this paper, a two-step log & production-based approach is described and applied to log and production data
with the aim of exploiting feature engineering applied to an industrial dataset. In particular, by aggregating
production and log data, the proposed two-steps analysis can be applied to predict if, in the near future, I) an
error will occur in such machine, and II) the gravity of such error, i.e. have a general evaluation if such issue
is a candidate failure or a scheduled stop. The proposed approach has been tested on a real scenario with data
collected from a woodworking drilling machine.
1 INTRODUCTION
Industry 4.0 paradigm aims to improve the plant level
of a factory by the means of different technology as-
sets, such as Internet of Things (IoT) sensors, Arti-
ficial Intelligence (AI), data integration and aggrega-
tion, and so on and so forth. Industry 4.0 brings the
advantage of knowing better and in detail both pro-
cesses and machines involved in the production. This
advantage creates the possibility to not only know-
ing and monitoring the plant but also to improve the
process as well as the life and the work of the ma-
chine. In this context, RECLAIM
1
positions itself as
a project that has the goal to increase productivity, ex-
tending the lifetime of the machines and reducing the
time and cost of machinery refurbishment and/or re-
manufacturing. This objective will be achieved de-
signing and developing a set of tools supporting sev-
a
https://orcid.org/0000-0003-2029-7086
b
https://orcid.org/0000-0003-2049-9876
c
https://orcid.org/0000-0003-3893-3845
d
https://orcid.org/0000-0003-0471-8434
e
https://orcid.org/0000-0001-7757-7308
1
https://www.reclaim-project.eu/
eral activities: from the monitor of machines’ health
status, to the implementation of adequate recovery
strategy (e.g., refurbishment, re-manufacturing, up-
grade, maintenance, repair, recycle, and so on and so
forth). As RECLAIM shows, most of the time, it is
possible to improve the life of the machine and its
performance by improving the maintenance schedule
and/or manage the working time.
In order to do that, the authors present a two-steps
approach for machine diagnostics, based on log and
production data, that can predict and analyze the fail-
ures of the monitored machine. The goal is to apply
a pipeline with steps that include data cleaning, fea-
ture extraction, and predictive tasks to an industrial
dataset without using sensors data. After a prepro-
cessing step used to prepare the data and create the
input features, the classification algorithm predicts is
a failure will happen in the next prediction windows
(PW), using the features present in the observation
windows (OW). The next component of the pipeline
is a severity estimation model that computes the level
of gravity of the predicted failure.
The strength, novel, innovative and convenient
aspect of this work is the possibility to do not in-
stall sensor data for the failure prediction, but using
320
Rossini, R., Bertozzi, N., Pereira, E., Pastrone, C. and Gonçalves, G.
Feature Extraction and Failure Detection Pipeline Applied to Log-based and Production Data.
DOI: 10.5220/0011268700003269
In Proceedings of the 11th International Conference on Data Science, Technology and Applications (DATA 2022), pages 320-327
ISBN: 978-989-758-583-8; ISSN: 2184-285X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

only historical machine logs and production indica-
tors. In particular, the approach enables health mon-
itoring and the prediction of failures on older equip-
ment without the need of install new sensors. Those
attributes permit companies to reduce costs buying
new monitoring components and speeds the process
of analyzing the machine behavior and deploying the
predictive solution, because the monitoring system
(of log and production data) was on the machine since
the beginning of its operation generating historical
data.
The paper is organized as follows: in Section 2,
the authors introduce a literature review about predic-
tive maintenance and fault diagnosis. Section 3 de-
scribes briefly the scenario in which the application
is described as well as the data available for it. Sec-
tion 4 presents the core solution presented in this pa-
per. Finally, Section 5 shows the results and Section 6
concludes the paper by summarizing and discussing
the work.
2 BACKGROUND
Nowadays modern machines are able to monitor a
large set of parameters, variables or indicators. The
production data is useful to build analytical solutions,
such as decision support systems or predictive main-
tenance solutions (Rosaria et al., 2021).
Among the operational data, machine failures and
alarms are some of the data sources most common in
the shop-floor. In fact, the PLCs continuously pro-
duce this log information about the machine, includ-
ing also internal events, warnings, alarms, errors, ma-
chine or components status or cycles. Logs are gen-
erated automatically at a very high rate, daily, hourly,
and contains timestamps about the information that is
reported. These log data can be stored into databases
or files, providing valuable information for machine
diagnostics (Xiang et al., 2018). Those diagnostics
algorithms can include degradation models or log-
based predictive maintenance (Gutschi et al., 2019),
(Wang et al., 2017). Despite of the structure of the
log file, managing these information can be an impor-
tant for extracting information about different aspect
of the machine production. As it is possible to see
in Section 3 log files can be also be involved in the
failure prediction.
3 DATASET
The data used for this work is from a woodworking
drilling machine described in detail in the subsection
3.1. That machine generates two different types of
data, 1) event log data, and 2) production data, which
are described in the subsection 3.2.
3.1 Scenario
The machine of interest is a woodworking drilling
machine (Brema VEKTOR15), composed of a set of
drill bits, divided into two spindles. The total number
of different drills is about 40/50. The life, in hours,
of a drill bit depends on multiple factors, such as the
hardness and wood quality. The quality of the mate-
rial depends on the suppliers and on what is indicated
in the specifications of the purchased wood. For in-
stance, the percentage of presence of metal residues
in the chipboards.
The shape of the drilled hole and the noise emit-
ted by the saw in case of cutting are good indicators
about the health of these tools. Due to the difficulty in
getting these measurements from the machinery, nor-
mally the drill bits are substituted or at regular inter-
vals or thanks to the operator’s experience.
3.2 Exploratory Data Analysis
The dataset used to design the pipeline is composed
of two parts: 1) the production data and 2) the log
data. The first one contains all the articles produced,
and the second one all the events occurred in the ma-
chine. The extensions of those documents are .ter
and .btk, which are a particular type of text files, ex-
ported/generated by the machine.
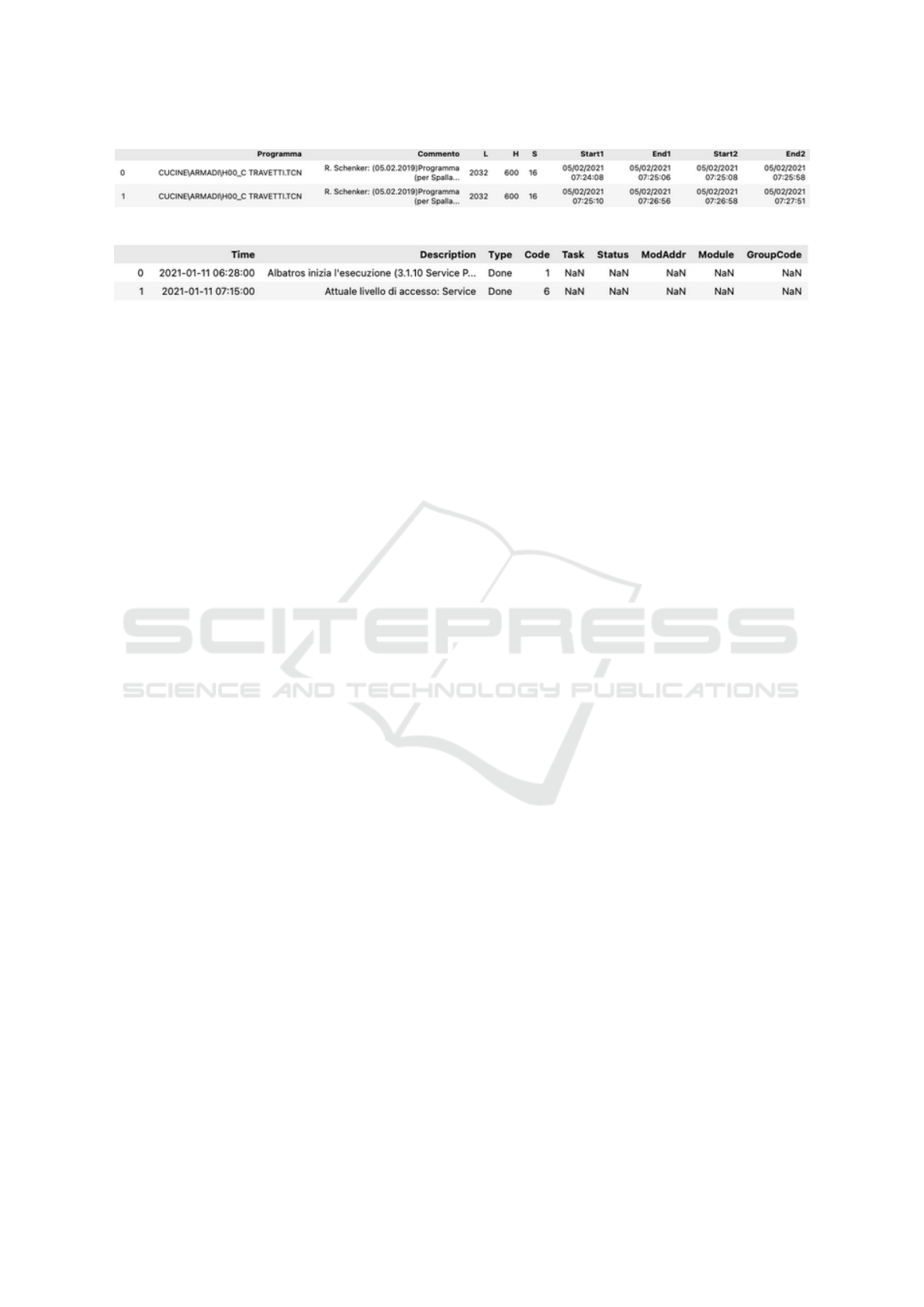
3.2.1 Production Data
The production dataset, in Figure 1a, contains all the
pieces of wood worked in a particular time interval.
The description of the columns is the following: 1)
”Programma”, file that contains all the drilling opera-
tions that must be made on the piece, 2) ”Commento”,
details about the drilling, 3) dimensions of the board,
L for length, H for height, and S for width, and 4)
starting and ending time of the two working phases
(Start1, End1, Start2, End2).
One of the goals of this preliminary statistical
analysis is to evaluate to what degree of the working
time is influenced by the material (type of wood such
as poplar, ebony, walnut, etc.), the dimensions of the
board and the number of drills. A plausible starting
point is represented by the computation of derivative
variables like the volume, which integrates together
the length, the height and the width, and the time in-
tervals T1, T2 and INT. Instead, the value of T1 is the
difference, in seconds, between End1 and Start1, T2
Feature Extraction and Failure Detection Pipeline Applied to Log-based and Production Data
321
(a) Production data.
(b) Log data.
Figure 1: Dataset preview including machine production (a) and log data (b).
the difference between End2 and Start2 and, finally,
INT the difference between Start2 and End1.
The VEKTOR15 machine executes the drilling of
wood boards. Thus, the time required by the ma-
chine to perform those holes is linked to the number
of holes. In this view, variables T1 and T2 could be
directly connected to the number of operations per-
formed by the VEKTOR15, and consequently to the
product categories. Additionally, variables T1 are T2
are completely uncorrelated, which means that the
first production phase does not give any information
about the time required by the subsequent stage.
3.2.2 Log Data
The log dataset, in Figure 1b, contains all the errors
emitted by the machine in a particular time interval.
The description of the columns is the following: 1)
timestamp of the error (time), 2) details about the er-
ror (description), 3) type, which includes three pos-
sible categories of error (Cycle, Done and System),
and 4) additional details about the error (Code, Task,
Status, ModAddr, Module, GroupCode).
In this case, the analysis is oriented to extract the
most serious stops, to retrieve a general pattern that is
specific-independent and to design a machine learn-
ing model that can predict future possible errors. The
only type of error that causes a stop of the machine is
the “System”. Then, all other logs can be discarded.
The available information about the specifications
of the error are in the field “Description”. Summa-
rizing the description into a sentence with a reduced
number of words and without the redundant indica-
tion of the device numbers makes the analysis easier
and more interpretable. For instance, the error “XX: Il
servoazionamento YY non
`
e collegato” has a unique
error code, independently of the value of XX and YY.
After, the computation the final list of errors includes
19 types of errors.
Figure 2a shows the entire production and the en-
tire generated log during 10 months of operation. It
is possible to notice that each production block is pe-
riodic, inline with the definition of a working week.
The space between each block represents a weekend.
Inside each block there are five smaller rectangles that
indicates a working day as well as in the first two
weeks of August, due to the summer holidays, and in
some days over the year, due to the festivities. Last,
there is an absence of errors in some periods, e.g.,
February and May.
The distribution and the occurring time of the er-
ror is import and by observing the data, it is possible
to see that, multiple kind of errors (log samples with
different description/code) occur at the same time.
For our purpose, it is more important the chance of the
error to occur more than the type of error and, in a sec-
ond instance, the severity of it, i.e., its duration. The
machine learning models that will reach this goal will
be based on a set of production and error indicators,
trying to find a causality between the time-production
and the insurgence of errors.
4 APPROACH
The analytical pipeline presented in this work, pre-
processes the data, extracting essential features from
both data sources (log events and production data),
computes observation, and prediction windows, and
feeds a binary classification algorithm, that will pre-
dict if the class label of the current input sample is
equal to 1 (stop) or 0 (normal operation). In case of
a predicted stop, the model is triggered for the com-
putation of the severity (time to repair), that has four
levels of gravity.
4.1 Feature Extraction
Some of the features used to train the models are
the production indicators. Figure 3 shows the list of
the most produced categories in 9 months. The col-
umn “Count” indicates the number of drilled boards;
the “Ratio” reflects the percentage of production as-
signed to each category. From Figure 3, it is possible
to cover the 95% of production by summing only a
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
322
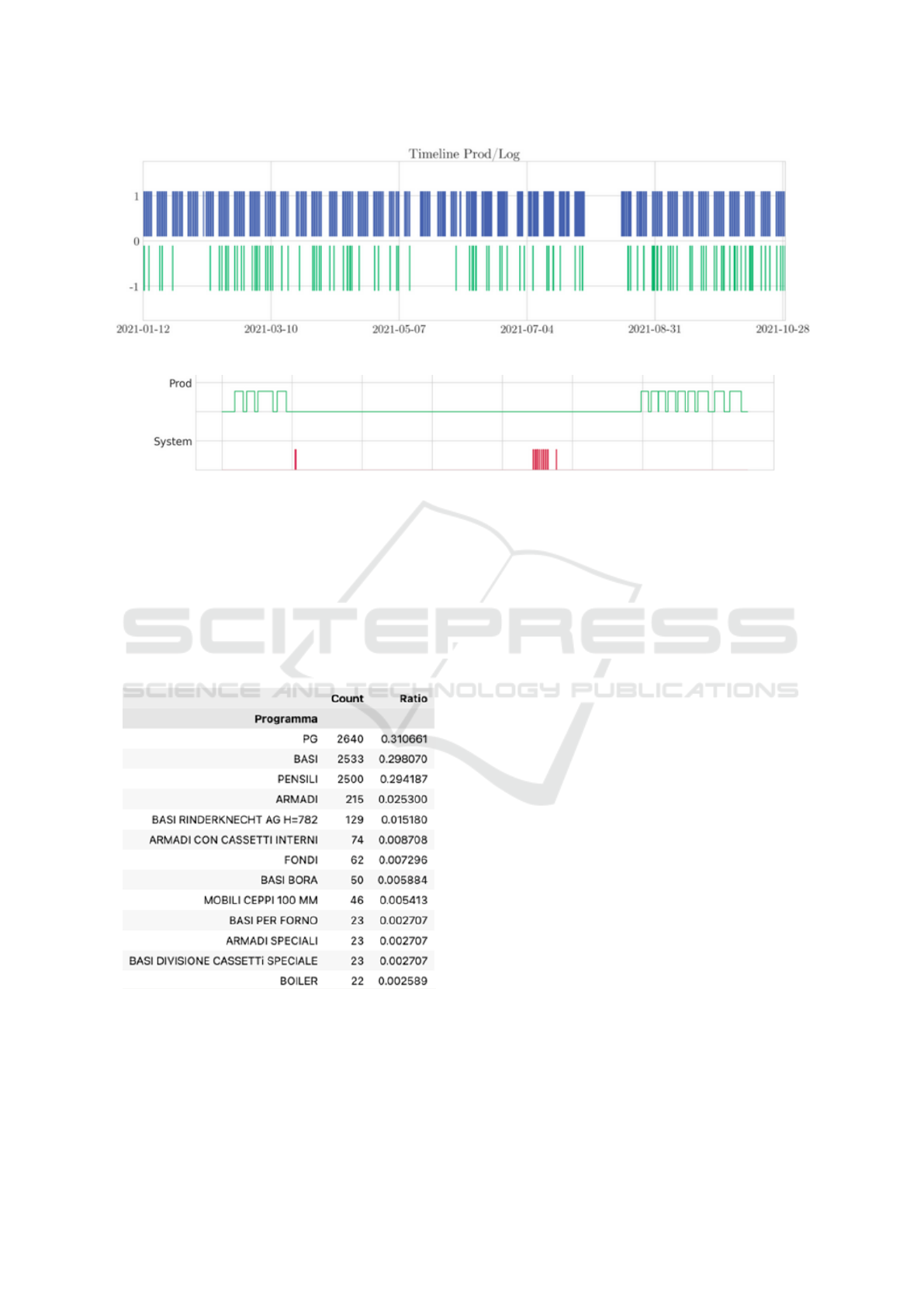
(a) Production and logs in the temporal line.
(b) Production and system errors in an extremely limited period of time, about 30 minutes.
Figure 2: Production and logs temporal line, with the entire period (a) and a period of 30 minutes (b).
small subset of categories, like “PG”, “BASI”, “PEN-
SILI”, “ARMADI”, and “BASI RINDERKNECHT
[...]”. This percentage is the threshold used to decide
which categories to include as features. After setting
these variables, the production indicators for each Ob-
servation Window (OW) include the cumulative num-
ber of drilled boards, together with the starting time
of the production.
Figure 3: Number of drilled boards for a subset of cate-
gories.
Figure 4 shows a typical subset of possible pro-
duction indicators with an OW with size 24,i.e, a tem-
poral window of 30 minutes. Each row of the produc-
tion dataset rapresents 12 working hours (the sum of
the preceding 24 row).
The log data pass through the same procedure, us-
ing a temporal region defined precisely as the produc-
tion one. Given the number of errors in each window
(30 minutes), the cumulative sum is computed to de-
termine a historical characterization of the errors over
time. This approach allows the model to predict, con-
sidering the MTTF of each log category. The error
features are appended to the production ones as part
of the input of the classification model. Those fea-
tures are essential for the classification model because
stops and failures occur periodically or after a certain
number of produced articles.
The next step is to incorporate the working hours
and days into the prediction pipeline, allowing the op-
erational interpretation of the model results. For in-
stance, if at the 17:40 of a working day, the model pre-
dicts a failure in the next three temporal windows (1.5
hours) corresponds to a failure prediction for the first
1.5 hours of production of the next day. Removing no
working hours and days is also essential to guarantee
a balancing between the classes labels in the dataset.
Usually, the working day begins at 6, included, and
ends at 18, excluded. Additionally, the intervals be-
tween 6-7, 12-13, and 17-18 are characterized by low
values of productivity and failures.
The number of errors and produced items allows
the computation of two metrics, that are essential to
evaluate the importance of each time interval: 1) the
sum of produced items and errors (PE indicator), and
2) the ratio of errors in the production (the number of
errors divided by the sum of errors and production)
(ER indicator). A low value of both indicators is a
Feature Extraction and Failure Detection Pipeline Applied to Log-based and Production Data
323
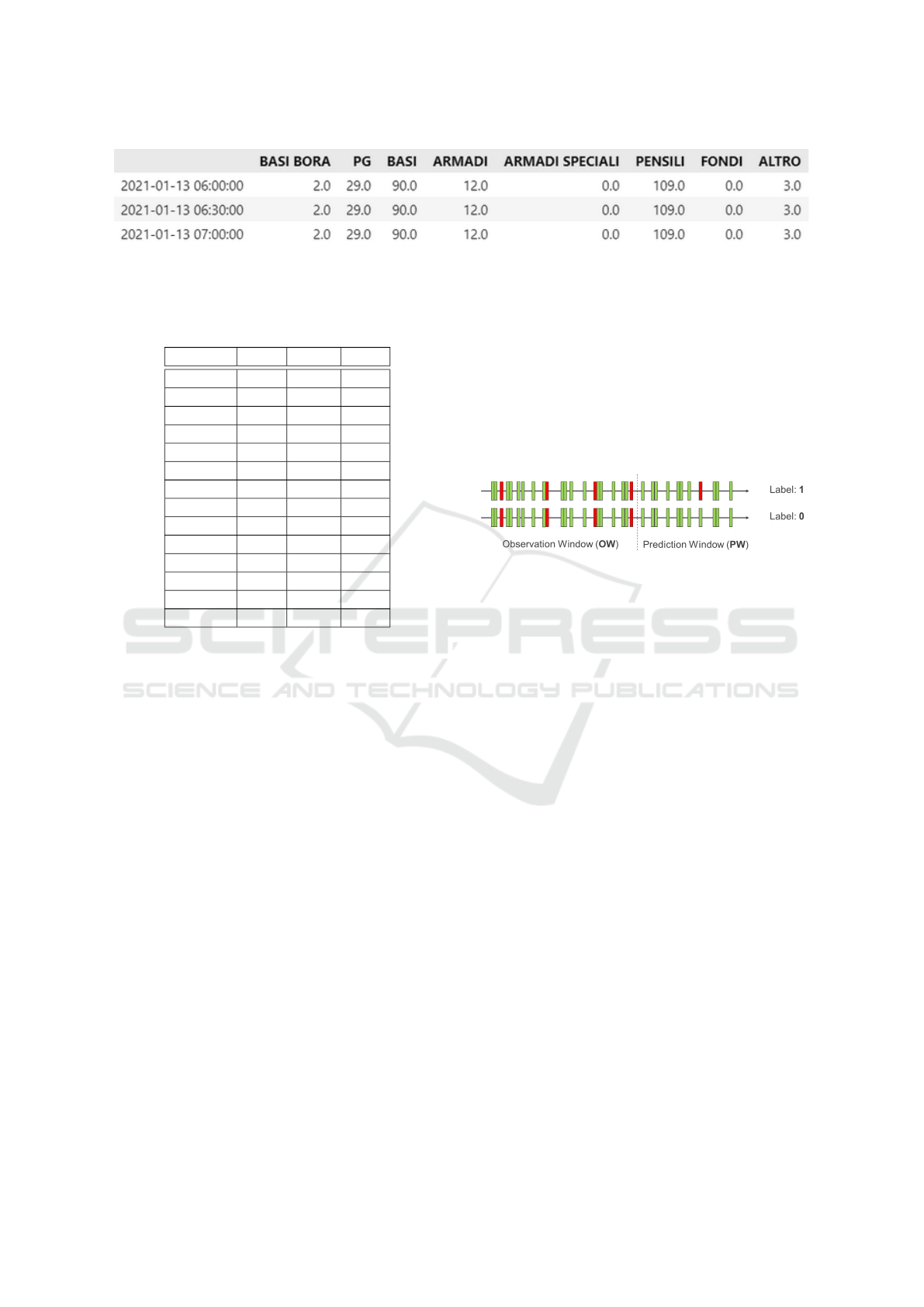
Figure 4: Example of some production indicators.
synonym of low interest in such time intervals.
Table 1: List of the working indicators for each hour.
Interval PE ER Risk
5-6 0 0 No
6-7 461 4.77 Yes
7-8 8308 32.64 Yes
8-9 8045 35.11 No
9-10 6401 37.45 No
10-11 9737 37.99 No
11-12 7912 32.42 No
12-13 276 0 Yes
13-14 6543 30.92 No
14-15 9519 47.31 No
15-16 8252 40.52 No
16-17 6608 44.87 No
17-18 816 57.72 Yes
18-19 0 0 No
Table 1 presents the values of the PE and ER in-
dicators. From the table, it’s possible to infer to 1)
drop the interval 12-13 due to the low value of PE and
ER, 2) maintain the interval 17-18 due to an extremely
high value of ER, and 3) consider if it is more conve-
nient to use also the samples contained in the interval
6-7, because of the lower value of PE and ER. The re-
moval of the interval 6-7 causes a drop in the model’s
precision mainly because the samples present in that
interval represent the initial base in predicting the fail-
ures of the next time intervals. The low values in the
interval 12-13 are due to the lunch break, which is not
zero because there are multiple lunch shifts; this also
supports the lower value of production in the interval
13-14.
The filtering process also contemplates the not
working days. Those days include the summer hol-
idays and some festivities that cause the closure of
the plant and the consequent stop of production. In
addition, if some of these days fall on Tuesday or
Thursday, for instance, usually also the working days
near to the weekend, respectively Monday and Friday,
could be candidates for closure. Additionally, this fil-
tering process permits lightening the unbalance of the
dataset.
4.2 Binary Classification Model
The binary classification model must predict if there
will be an error in the future time frame, given the
production, the actual time, and the historical list of
errors. The prediction model will implement a clas-
sification algorithm, where the class label equal to 1
corresponds to the prediction of failure in the future
time frame, and a class label of 0 to the normal oper-
ation of the machine (no failure).
Figure 5: Observation and prediction windows, with differ-
ent values of class label.
The prediction refers to a limited time slot, which
introduces the concepts of observation window and
prediction window. Figure 5 represents the two differ-
ent typical scenarios (prediction of failure or normal
behavior), where a temporal window is a fixed-sized
period. The set of windows used to make a prediction
are the observation window (OW); the ones associ-
ated with the prediction form are the prediction win-
dow (PW). Then, given a series of OWs, the model
predicts if an error will occur between the actual time
and the end of the PW. The optimal configuration is
characterized by a low value of PW because gives a
final precision very confined in time. However, this
introduces a trade-off between the precision (num-
ber of prediction windows) and the model’s perfor-
mance. So, to reach high performance, it is necessary
to forecast the error with low precision. The model re-
sults show that trade-off and compare different mod-
els with different values of OW and PW.
The classification algorithms tested are the Ran-
dom Forest (RF) and the k-Nearest Neighbour (k-
NN). The RF has a good performance in classifica-
tion problems. The k-NN performs well in clustered
samples, where the distance metric easily separates
the data samples. Looking at the samples distribu-
tion, considering the high level of isolation of label
items equal to 1, the suitable algorithm is the k-NN.
The hyperparameters are tuned for the entire pipeline,
including the preprocessing and the algorithm compo-
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
324

nents. Regarding the preprocessing, the hyperparam-
eters to tune are the number of observing and predic-
tion windows, OW and PW, and the test size. For the
classification model, the hyperparameters tested are
the number of estimators of the RF and the number of
neighbors of the k-NN. The approach used to the hy-
perparameter tuning was the k-fold cross-validation.
In datasets unbalanced, like this one, the adoption of
the accuracy as the evaluation metric is not ideal due
to the weight of the majority class. In this manner, due
to the high number of 0-labeled samples, the accuracy
can reach the same percentage of these samples con-
cerning the total number of rows of the dataset.
4.3 Stop Severity Estimation
The prediction of the error severity consists of esti-
mating the gravity of the VEKTOR15 stops and fail-
ures. The model presented provide information about
the gravity of the failure. The computed information
is useful to understand if the predicted stop will be a
short stop or a failure that causes the stoppage of the
machine for several days. Figure 6 illustrates a typi-
cal log cluster of a drilling machine. The production
samples have both the starting and the ending times-
tamp, while the log samples reported only the indica-
tion of the timestamp when the error occurred. For
this reason, it is not directly extracted from each clus-
ter of events an accurate value of duration or time to
repair (TTR) in case of failure. The log cluster in-
cludes the events (second row) between the produc-
tion interruption and its restart. The computation of
each cluster duration considers the first event as start-
ing timestamp and the last one (restart of machine) as
the ending timestamp. In this way, it’s possible to ap-
proximate the stop duration and associate a severity
to each stop. There are four levels of failure severity,
1) no failure (label 0), and 2) three incremental values
of failure severity (labels 1, 2, and 3). The associa-
tion between the failure severity and the event clus-
ter duration is performed using different thresholds.
Those thresholds come from the 25th, 50th, and 75th
percentiles of the cluster duration distribution. The
subdivision in the percentage of labels is 30% label 1,
45% label 2, and 25% label 3, presenting all labels a
good value of balancing (close to 33%).
Figure 6: Definition of cluster duration. The faded orange
box indicates the uncertainty generated by the process.
Once each cluster has associated one severity
class, each temporal window has to be labeled de-
pending on the severity of the clusters it contains.
Windows containing more than one cluster, the label
associated is the one of the cluster with higher sever-
ity. After the computation of the new labels, the clas-
sification model passes through the same procedure
as the one done in binary classification, being fed by
a series of OW and predicting the severity label of the
PW. The algorithms tested were the RF and the k-NN.
The binary classification model and the stop severity
failure are complementary because they provide dif-
ferent indicators and are specialized in different tasks,
as show the results further ahead.
5 EXPERIMENTS & RESULTS
As mentioned before, the entire pipeline is tested
using the k-fold cross-validation. Different hyper-
parameters are experimented for both classification
models and OW and PW.
5.1 Stop Detection Results
The f1-score is the used metric because it is the har-
monic mean of precision and recall and can be used
as a general indicator.
Figure 7 reports the results obtained with the Ran-
dom Forest and the k-Nearest Neighbour classifier
with different observation and prediction windows.
The optimal classification model will be the one that
reaches the best performance in terms of f1-score, re-
call, and with the lowest number of prediction win-
dows. Besides the number of PW, the decision crite-
ria between the different models instances will be the
arithmetic mean between the f1-score and the recall
of class 1. After analyzing Figure 7, it’s noticeable
that the pairs of (OW, PW) which satisfy the previous
objective function are (24, 4) for the RF and (62, 3)
for the k-NN.
Table 2 compares the two classifiers’ best results,
allowing the selection of the best one to be used in
production and on-site. Due to the high level of un-
balance, the indicators related to class 0 are not sig-
nificant for that analysis. On the other hand, the re-
call, precision, and the f1-score of class 1 are more
meaningful. As mentioned before, the usage of those
metrics reduce false positives (FP) and false negatives
(FN).
It is observable that the k-NN results are slightly
better than the ones obtained by the RF because the re-
call is higher for the minority class (1-labelled), which
reduces the number of unpredicted failures (type II er-
ror). The level of f1-score is slightly lower in the k-
Feature Extraction and Failure Detection Pipeline Applied to Log-based and Production Data
325
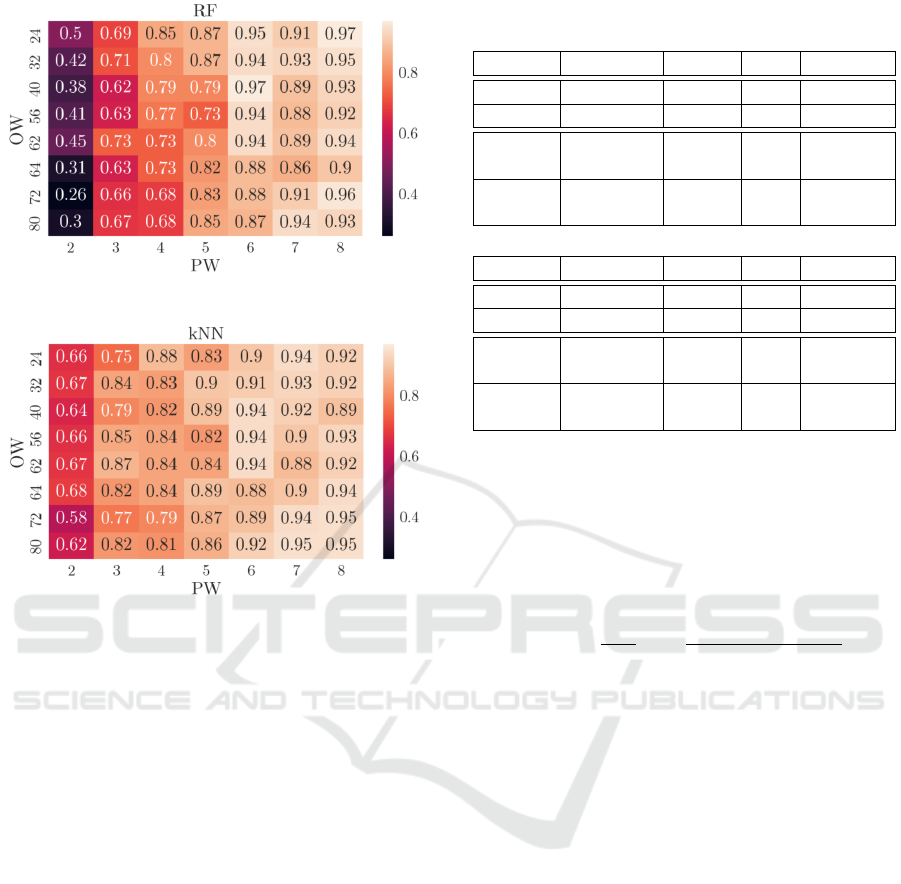
(a) Results for the Random Forest (RF).
(b) Results for the k-Nearest Neighbour (k-NN).
Figure 7: F1-score results obtained by the Random Forest
(a) and k-Nearest Neighbour (b) in the binary case.
NN when compared to the RF; however, this decrease
is due to the higher precision of the RF. Since the type
I errors (false alarms) have less influence on the shop-
floor than the type II errors, the selected algorithm
should be the one with higher recall; even with a slight
decrease of f1-score. Additionally, using a higher ob-
servation window (OW) allows the model to consider
more historical information, including more failure
patterns. Those considerations imply that the k-NN
should be the selected classification model to execute
on production because of the performance metrics and
the selected OW and PW.
5.2 Severity Prediction Evaluation
As in the binary task, the accuracy is not the ideal
performance metric for evaluating the severity model
due to the dataset imbalance. For this reason, the cor-
rective coefficient used is the goodness (g) defined in
Equation 1, where ˆy is the predicted class label, y the
real class label, and w the weights assigned to each
class. The goodness is adopted as corrective coef-
ficient because the difference between the predicted
severity labels is crucial, i.e., it is not the equivalent
Table 2: Classification reports obtained with the Random
Forest (a) and with the k-Nearest Neighbour (b).
Class Precision Recall F1 Support
0 0.98 0.99 0.99 625
1 0.90 0.84 0.87 67
macro
avg
0.90 0.84 0.87 692
weight
avg
0.97 0.98 0.98 692
(a) Random Forest results with OW=24 and PW=4.
Class Precision Recall F1 Support
0 0.99 0.98 0.99 633
1 0.81 0.89 0.85 53
macro
avg
0.90 0.93 0.92 686
weight
avg
0.98 0.98 0.98 686
(b) k-Nearest Neighbour results with OW=62 and PW=3.
predict a 0 or a 2 when the real class is equal to 3.
This situation reflects in the staff being prepared for a
small maintenance of the machine (predicted label 2)
or not being prepared at all (predicted label 2) when a
failure of high severity will happen (real label 1.)
g(y, ˆy, w) =
1
∑
w
i
m
∑
i=1
w
i
∑
i
j=1
p( ˆy = i|y = j)
∑
n
j=1
p( ˆy = i|y = j)
(1)
A low value of goodness means a high level of
misclassifications; instead, a high value of goodness
indicates a minimal presence of critical situations like
the one described above. The classification algo-
rithms experimented for this task were the k-NN and
RF, where the k-NN obtained better results than the
RF, practically for each pair of windows. Figure 8
reports the confusion matrices for the optimal config-
urations of OW and PW after applying the goodness
as the corrective coefficient. As a correction coeffi-
cient, the goodness minimizes the distance between
the predicted severity and the real class. That effect
is noticeable in the confusion matrices, particularly
in the k-NN one, where the algorithm accurately pre-
dicted the severity of the failure almost every time.
So, the severity prediction model has an excellent per-
formance estimating the gravity of the stop; however,
it has lower performance when it comes to detecting if
it’s a failure or not (high number of FN and FP in the
label 0). That issue is addressed by using the binary
classification model to predict if there is a stop or not,
and after, execute the severity model to estimate the
gravity of the expected stop.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
326
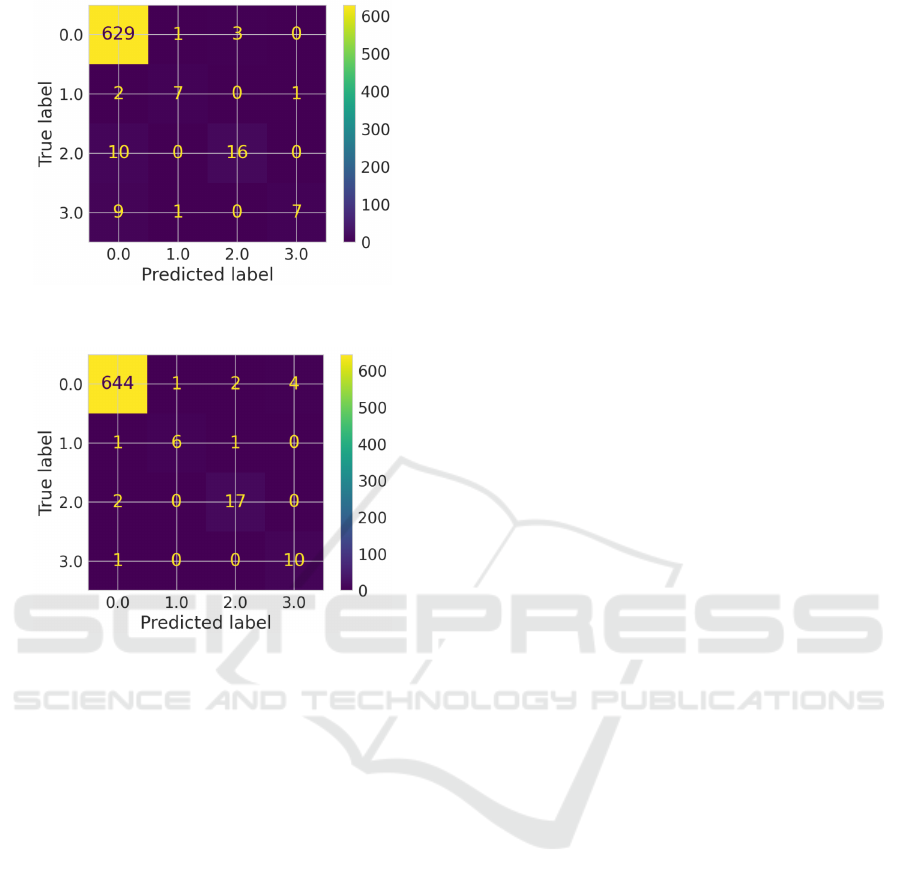
(a) Confusion matrix for the Random Forest (RF) with
OW=24 and PW=4.
(b) Confusion matrix for the k-Nearest Neighbour (k-NN)
with OW=62 and PW=3.
Figure 8: Confusion matrices obtained with the Random
Forest (a) and with the k-Nearest Neighbour (b).
6 CONCLUSIONS & FUTURE
WORK
The work in this paper developed provides a valu-
able pipeline for Prognostic and Health Management
(PHM). The pipeline was applied to a dataset gen-
erated by a woodworking drilling machine (Brema
VEKTOR15). That data includes machine log events
(alarms, stops, failures) and production data (pro-
duced pieces, including product type or working
time). The analytical pipeline preprocessed that data,
extracting essential features from both data sources,
computed observation, and prediction windows, and
feeding the binary classification algorithm, which if
predicts a stop triggers the model for the computation
of the severity (time to repair). Those indicators pro-
vide essential information for the maintenance team,
mainly operational insights about when a failure will
occur and its impact. The usage of the severity model
provides essential insights to the operators because
it informs them if the predicted stop has a higher or
lower impact, which traduces in having a short stop
or the failure that could stop the machine for days.
The evaluation of the models results in the selec-
tion of the k-NN algorithm for the binary classifier
(with OW=62 and PW=3) and severity predictor (with
OW=62 and PW=3). The excellent performance of
the k-NN for the two different tasks results from the
same input data that feeds each one of the models.
As future work, the goals pass through applying
the failure predictions (including severity) to deci-
sion support systems for the machine life and prod-
uct quality optimization. Another goal will be to val-
idate the algorithms using a simulation environment
that emulates the industrial shop floor. Finally, within
the project, it’s planned to apply this pipeline to other
industries like textile and white goods manufacturers.
ACKNOWLEDGMENT
The work presented here was part of the project
”RECLAIM- RE-manufaCturing and Refurbishment
LArge Industrial equipMent” and received funding
from the European Union’s Horizon 2020 research
and innovation programme under grant agreement No
869884. The authors thank PODIUM SWISS SA for
providing the data used in this paper and Asia Savino
for the support on data validation.
REFERENCES
Gutschi, C. et al. (2019). Log-based predictive main-
tenance in discrete parts manufacturing. Procedia
CIRP, 79:528–533. 12th CIRP Conference on Intelli-
gent Computation in Manufacturing Engineering, 18-
20 July 2018, Gulf of Naples, Italy.
Rosaria, R. et al. (2021). Ai environment for predic-
tive maintenance in a manufacturing scenario. In
2021 26th IEEE International Conference on Emerg-
ing Technologies and Factory Automation (ETFA ),
pages 1–8.
Wang, J. et al. (2017). Predictive maintenance based on
event-log analysis: A case study. IBM Journal of Re-
search and Development, 61(1):11:121–11:132.
Xiang, S., Huang, D., and Li, X. (2018). A generalized
predictive framework for data driven prognostics and
diagnostics using machine logs. In TENCON 2018 -
2018 IEEE Region 10 Conference, pages 0695–0700.
Feature Extraction and Failure Detection Pipeline Applied to Log-based and Production Data
327
