
Toward Autonomous Mobile Robot Navigation in Early-Stage Crop
Growth
Luis Emmi
a
, Jesus Herrera-Diaz
b
and Pablo Gonzalez-de-Santos
c
Centre for Automation and Robotics (UPM-CSIC), Arganda del Rey, Madrid 28500, Spain
Keywords: Early-stage Crop-growth, Autonomous Navigation, Row following, Time-of-Flight Camera, Deep Learning.
Abstract: This paper presents a general procedure for enabling autonomous row following in crops during early-stage
growth, without relying on absolute localization systems. A model based on deep learning techniques (object
detection for wide-row crops and segmentation for narrow-row crops) was applied to accurately detect both
types of crops. Tests were performed using a manually operated mobile platform equipped with an RGB and
a time-of-flight (ToF) cameras. Data were acquired during different time periods and weather conditions, in
maize and wheat fields. The results showed the success on crop detection and enables the future development
of a fully autonomous navigation system in cultivated fields during early stage of crop growth.
1 INTRODUCTION
Autonomous vehicles for agriculture have drawn the
attention of farmers in recent decades and the activity
for developing robust, safe and eco-friendly
autonomous vehicles has increased significantly
(Gonzalez-de-Santos et al., 2020). However,
navigation is still a current challenge for autonomous
robotic systems (Sarmento et al., 2021) because
agricultural fields are unstructured, dynamic and
diverse environments where weather conditions,
luminosity, and stages of crop growth change
continuously.
Conventional localization and perception
technologies, such as the Global Navigation Satellite
System (GNSS), 2D and 3D LIDAR, and stereo
cameras, have proven their usefulness in ensuring
autonomous navigation in fields (Shalal et al., 2013).
Although they rely heavily on user intervention to
ensure accurate mapping and conditioning of the
working environment, they are not able, by
themselves, to develop a robust navigation system
capable of ensuring full autonomy in these
demanding environments. Precise mapping
(including crop location), setting up the working area,
luminosity variability, GNSS correction signal
a
https://orcid.org/0000-0003-4030-1038
b
https://orcid.org/0000-0002-8516-0550
c
https://orcid.org/0000-0002-0219-3155
failure, communications latency, and GNSS-denied
zones are currently some of the major challenges in
autonomous navigation.
Weed management is one of the operations that
has generated the most solutions in agriculture
(Oliveira et al., 2021). Machine vision and GNSS-
based mapping have been the preferred technologies
to distinguish weeds from crops and deliver precision
treatment (Mavridou et al., 2019). Site-specific weed
management techniques have gained considerable
popularity in the last few years, particularly those
based on high-power laser sources, which offer a
more sustainable and eco-friendlier alternative than
the other techniques (Rakhmatulin & Andreasen,
2020). These technologies have been shown to be
successful when weeds (and therefore crops) are in an
early stage of growth. Crop row following has been a
widely discussed topic in the literature (Bonadies &
Gadsden, 2019). However, most of the studies and
applications solve the problem when the crop is
already in a mature growth stage or in crop types with
an appropriate morphology for LIDAR-based
methods, such as vineyards (Emmi et al., 2021). The
early plant stage growth, together with the
unevenness in ground height and the presence of
weeds, make conventional perception systems unable
Emmi, L., Herrera-Diaz, J. and Gonzalez-de-Santos, P.
Toward Autonomous Mobile Robot Navigation in Early-Stage Crop Growth.
DOI: 10.5220/0011265600003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 411-418
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
411

to identify the crop properly, thus preventing its
further use for autonomous row guidance.
This paper presents an approach for developing
smart perception systems to enable autonomous
robots to navigate in cultivated fields in an early stage
of crop growth without relying on absolute
localization systems, such as GNSS.
2 RELATED WORK
Autonomous navigation in crop field is mainly
composed by following the crop lines, and at the end
of each pass, making a U-turn to return to the field.
The identification and following of crop rows are
subjects that still attract considerable interest. Diverse
strategies are found in the literature to solve these
problems that follows a quite general procedure: (i)
single crops or crop rows are detected; (ii) the crop row
central point or the equation of the line is extracted; and
(iii) the path to be followed by the mobile system is
planned and executed. The techniques commonly used
for identifying the crop rows are mainly based on a
combination of binary segmentation, greenness
identification (Woebbecke et al., 1995), morphological
operations, Otsu’s method (Otsu, 1979), and edge
detection techniques, such as the Hough transform
(Hough, 1962). Many studies have made use of these
techniques across different types of crops. For
example, Jiang & Zhao, (2010) applied these
techniques to identify the crop lines in a soybean field.
Romeo et al., (2012) developed an algorithm based on
green pixel accumulation for extracting crop lines in a
maize field that outperformed the Hough
transformation methods.
To increase the accuracy and robustness of these
techniques, Jiang et al., (2015) proposed a method
based on least squares and multiple regions of interest
(ROIs), where the data were split into horizontal
strips. They compared their proposal with the
standard Hough transform on soybean, wheat and
maize crops. Following the same strategy, Zhang et
al., (2018) applied a multi-ROI approach in a maize
field. As a novelty, they employed double
thresholding approach, using the Otsu method in
combination with particle swarm optimization to
improve the differentiate between weeds and crops.
There are also several studies that combined the
absolute navigation systems and computer vision
techniques previously mentioned. For example,
Bakker et al., (2011) employed an RTK-DGPS
system to navigate in a sugar beet field, and
Kanagasingham et al., (2020) proposed a combined
navigation strategy for a rice field weeding robot.
For vineyards and orchards in general, it is quite
common to use LIDAR-based systems in
combination with IMU data and odometers (Lan et
al., 2018) or color cameras (Benet et al., 2017) for
crop row following. The latest technological
advances have made it possible to incorporate other
technologies to obtain 3D information from the
environment, as is the case with infrared-based
cameras. Among these cameras, there is a growing
interest in the time-of-flight (ToF) cameras, that
provides a point cloud of the environment in a manner
that is similar to the way that LIDAR does. Gai et al.,
(2021) used this type of camera for navigation under
a canopy, where the GNSS signal may be denied.
Currently, as the above work stated, ToF cameras are
beginning to be used with great interest in outdoor
environments due to improvements in their light
sensors and wider vertical field-of-view (FoV)
capability than what is available with LIDAR sensors.
There are many research studies that use classical
techniques for in-field navigation, but these
techniques usually need to adjust certain system
parameters for navigating in new environments and
situations, which limits their generalizability. In
addition, for methods based on green detection, the
presence of weeds may be a major problem.
In recent years, techniques based on artificial
intelligence (AI) have gained much interest. Two
different techniques can be distinguished: (i) object
detection, which uses bounding boxes to identify the
classes, and (ii) segmentation, which is based on pixel
classification. Their selection depends on the type of
crop to be identified: (i) wide row crops (maize, sugar
beet) where the object detection is preferred and (ii)
narrow row crops (wheat, rice) where segmentation-
based classification is more suitable. Normally,
artificial intelligence-based techniques are used to
identify the crop, and then, some combination of the
aforementioned techniques, such as the Hough
transform or RANSAC (Fischler & Bolles, 1981), are
used to extract the crop lines. Ponnambalam et al.,
(2020) used a SegNet (Badrinarayanan et al., 2017)
with ResNet50 (He et al., 2015) convolution neural
network (CNN) in combination with a multi-ROI
strategy to segment and extract the row crops in
strawberry fields. Simon & Min, (2020) compared the
results of a method based on a neural network with
the classical method based on the Hough transform in
a maize field. The deep learning method obtained
higher accuracy and more robustness. Emmi et al.,
(2021) used a YOLOv3 (Redmon & Farhadi, 2018)
network for object detection in broccoli, cabbage and
vineyard trunks. de Silva et al., (2021) tested the
performance of a deep learning model based on U-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
412
Net (Ronneberger et al., 2015) in a sugar beet field
under different scenarios, such as shadows, presence
of weeds, gaps in the crop row, intense sunlight
conditions, and different stages of crop growth. There
is also a special interest in AI on the edge, i.e., on
users' devices. For this purpose, MobileNet (Howard
et al., 2017) networks are the most suitable due to
their efficiency and speed, with the counterpart
having generally poorer accuracy.
In the search for new alternatives to weed
management, strategies based on high-power lasers
have emerged. This type of solution has been shown
to be subtle when plants are small (Rakhmatulin &
Andreasen, 2020). These types of strategies have
given way to alternatives for row following, where
the abovementioned examples may not achieve
accurate results and the robustness of the models may
be inadequate. To generalize the problem, it is
necessary define what an early-stage crop is. There
are different nomenclatures to define the different
growth stages of different crops, but these definitions
are normally specific to each type of crop. For the
sake of this development, maize and wheat are
selected as examples of crops sown in wide rows and
narrow rows, respectively, which coincide with this
case study. The growth stage in maize will be
identified using the classification made by (Zhao et
al., 2012), while the classification made by (Zadoks
et al., 1974) will be used for wheat. In this paper,
early growth stage crops will be considered as those
from the moment the perception system is able to
detect them until the moment of growth when the
weeding system based on high-power laser sources is
no longer efficient for the elimination of weeds,
assuming that crops and weeds grow at the same rate.
This stage corresponds to approximately the V2 stage
for maize (Zhao et al., 2012) and approximately the
12-seedling stage for wheat (Zadoks et al., 1974).
The literature on autonomous navigation in the
early growth stage crops is rather scarce, although
there are some significant studies. For maize, Wei et
al., (2022) built what they defined as the dataset row
anchor selection classification method (RASCM) for
tracking crop rows. García-Santillán et al., (2018)
developed a method for extracting curved and straight
crop rows based on greenness identification, double
thresholding and morphological operations that was
also tested in what one can consider early-stage maize
crops. Winterhalter et al., (2018), assuming that crop
rows are parallel and equidistant, proposed a method
based on an adaptation of the Hough transform that
was able to detect crop rows in early-stage sugar beet
crops. Finally, Ahmadi et al., (2021) developed a
method based on greenness identification and Otsu’s
method for multicrop row detection relying only on
on-board cameras. This proposal was tested in early-
stage sugar beet.
Therefore, this paper presents a strategy that
integrates several of the technologies mentioned
above, such as artificial intelligence for crop
detection, in conjunction with emerging perception
systems such as ToF cameras, to obtain a highly
accurate depth map and locate the detected crop with
respect to the mobile platform. The present work aims
to pave the way for the development of a system able
to autonomously navigate in cultivated fields in an
early stage of crop growth in a robust and efficient
way, with the capability to scale the system to
incorporate new crops or to be able to operate in
unforeseen environments.
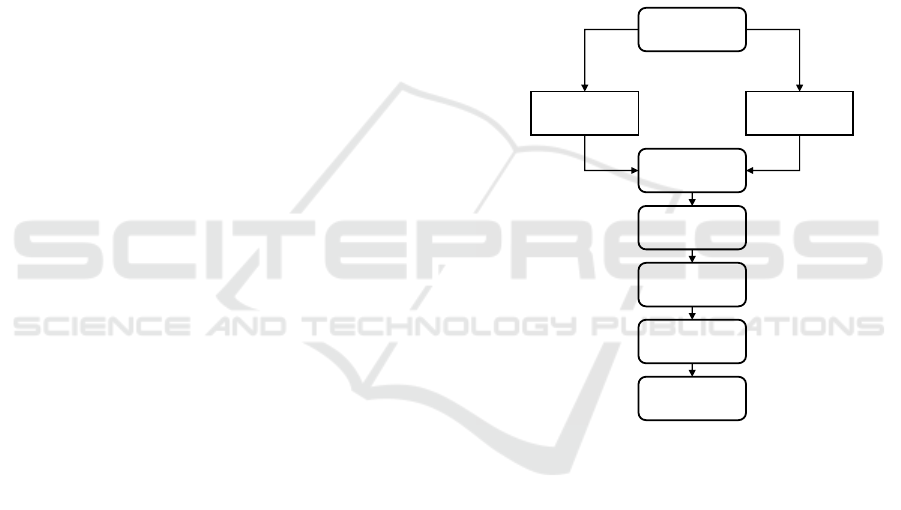
Figure 1: Diagram of the presented methodology.
3 MATERIALS AND METHODS
Figure 1 presents a general procedure for enabling
autonomous navigation in crops in an early growth
stage. First, data are acquired by the perception
systems, which consist of RGB and ToF cameras.
Then, depending on the type of crop, a different
approach is followed. For wide-row crops, object
detection is used, and for narrow-row crops,
segmentation is applied to identify the crops in the
RGB images, making use, in both cases, of deep
learning models. Once a crop is identified, a match
between the ToF point cloud and the output of the
respective deep learning model is made, obtaining the
relative distance between the detected crops and the
autonomous vehicle. Next, a filtering process is
Data
acquisition
Object detection
Path following
Lines extraction
Clustering
Matching with
ToF point cloud
Filtering
Segmentation
Wide-row crops
Narrow-row crops
Toward Autonomous Mobile Robot Navigation in Early-Stage Crop Growth
413

utilized to remove the outliers and the noise of the
matched point cloud, mostly produced by the
sunlight. Next, RANSAC is applied to obtain the
ground plane, the background points are removed,
and the points that correspond to the crops are
projected onto the plane. Later, a clustering algorithm
based on DBSCAN (Ester et al., 1996), using the
present and past points, is employed to obtain the crop
rows. Finally, the RANSAC algorithm is again
applied to compute the directions of each cluster, and
the final path that the mobile platform must follow is
calculated.
For crop identification, depending on the type of
crop, a different deep learning architecture was used.
In the case of maize, the YOLOv4 (Bochkovskiy et
al., 2020) model was employed to detect the plants.
For wheat, several combinations between the
segmentation models PSPNet (Zhao et al., 2017), U-
Net (Ronneberger et al., 2015), and SegNet
(Badrinarayanan et al., 2017) and the base models
ResNet50 (He et al., 2015), VGG16, MobileNet
(Howard et al., 2017) and CNN were tested (see Table
1). Their performance characteristics and
comparisons of the results of the different models will
be discussed in the results section.
Table 1: Segmentation models.
Base Model Segmentation Model
1 CNN PSPNet
2 VGG16 PSPNet
3 ResNet50 PSPNet
4 CNN U-Net
5 VGG16 U-Net
6 ResNet50 U-Net
7 MobileNet U-Net
8 CNN SegNet
9 VGG16 SegNet
10 ResNet50 SegNet
11 MobileNet SegNet
Figure 2: Example of the maize experimental fields.
Figure 3: Example of the wheat experimental fields.
The presented methodology was validated under
the European project named Sustainable Weed
Management in Agriculture with Laser-Based
Autonomous Tools (WeLASER). The WeLASER
project is a consortium of ten partners from Spain,
Germany, Denmark, France, Poland, Belgium, Italy
and the Netherlands. WeLASER aims to develop
precision weeding equipment based on applying
lethal doses of energy to weed meristems using a
high-power laser source with the main objective of
eliminating the use of herbicides while improving
productivity. The prototype consists of an
autonomous robot with an artificial intelligent vision
system that will differentiate between weeds and
crops. It will then detect the meristems of the weeds
and apply the laser to kill the plants. All the systems
will be coordinated by a smart controller based on the
Internet of Things (IoT) and cloud computing
techniques. The target crops will be wheat, maize, and
sugar beet (WeLASER, 2022).
Figure 4: CAROB robotic platform and perception system.
RGB
ToF
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
414

To validate the presented algorithm, data were
acquired in experimental fields of maize (see Fig. 2)
and wheat (see Fig. 3). The dimensions of each field
were 20 m × 60 m.
The CAROB robotic platform that was developed
by AgreenCulture (2022) was used for data
acquisition, where the perception system was
installed (see Fig. 4). The perception system consisted
of an RGB camera TRI016S-CC RGB equipped with
the SV-0614V lens (resolution: 1.6 MP; FoV: 54.6° ×
42.3°), and a ToF camera HLT003S-001 (resolution:
0.3 MP; FoV: 69° × 51°), of which both were
acquired from Lucid Vision Labs (2022).
The data were acquired by manually operating the
mobile platform during different time periods and
weather conditions in the same season. To build the
maize and wheat datasets 450 and 125 images were
labeled, respectively, using data augmentation
techniques, such as rotating, image cropping, blurring
and brightness changes, among others, were used to
increase the size of the dataset. In both cases, 80% of
the data was destined for the training group, 10% for
the validation group and 10% for the test group. Part
of the dataset used in this work has been published in
an open-access repository, for both maize
(https://doi.org/10.20350/digitalCSIC/14566) and
wheat (https://doi.org/10.20350/digitalCSIC/14567).
As shown in Fig. 5, depending on how the labeling
process is performed, this can lead to misleading
errors. In the dataset images, the crops that are located
in more distant regions or that are not clearly
recognizable have not been labeled. Consequently,
when the model was validated, in these regions false-
positives were detected, although they were unlabeled
crops, but because they had not been previously
labeled, the model would consider them as false
positives, decreasing the real performance of the
model. An alternative to mitigate this common
problem, ignoring masks, was used by specifying that
the model not consider these parts of the images
where the differences between crops and the
background may be ambiguous.
Figure 5: Example of a labeled wheat image.
The segmentation models were implemented with
Keras (https://github.com/fchollet/keras) using
TensorFlow (Abadi et al., 2016) as the backend
software tool, while the YOLOv4 model used
Darknet (Redmon, 2013) version. The training
process was performed on a Quadro RTX 6000
graphics card with 24 GB GDDR6 of RAM memory,
while the inference process was evaluated using
GeForce GTX 1650.
Table 2: Performance of the segmentation models.
Model IoU
Training time
[s] per epoch
MobileNet SegNet 0.6815 124
MobileNet U-Net 0.7347 124
ResNet50 PSPNet 0.7370 180
ResNet50 SegNet 0.7578 164
ResNet50 U-Net 0.7406 183
VGG16 PSPNet 0.7343 227
VGG16 SegNet 0.7461 196
VGG16 U-Net 0.6982 208
CNN PSPNet 0.7321 171
CNN SegNet 0.7364 156
CNN U-Net 0.7339 155
4 RESULTS
To assess the overall performance of the presented
methodology, it is first necessary to evaluate the crop
identification models. For the wheat crop, the
different models listed in Table 1 have been
compared. All models were trained for the same
initial number of epochs, although an early stopping
technique based on validation loss was applied to
avoid overfitting. The comparison between the
different segmentation models is summarized in
Table 2. As the dataset was imbalanced, the metric
chosen to evaluate the performance of the models was
a frequency weighted intersection over union (IoU)
determination. The model with the best performance
was ResNet50-SegNet. However, in these types of
applications in which the models are going to be used
in real time, apart from evaluating the performance of
the model, it is necessary to consider their inference
time. In this case, the differences between the
inference times of the considered models were not
notable, taking as a basis that, in general, the
inference time is smaller than the training time.
Hence, the final model that has been selected was the
aforementioned model. As expected, models based on
MobileNet are considerably faster, but at the cost of a
generally poorer performance.
Toward Autonomous Mobile Robot Navigation in Early-Stage Crop Growth
415
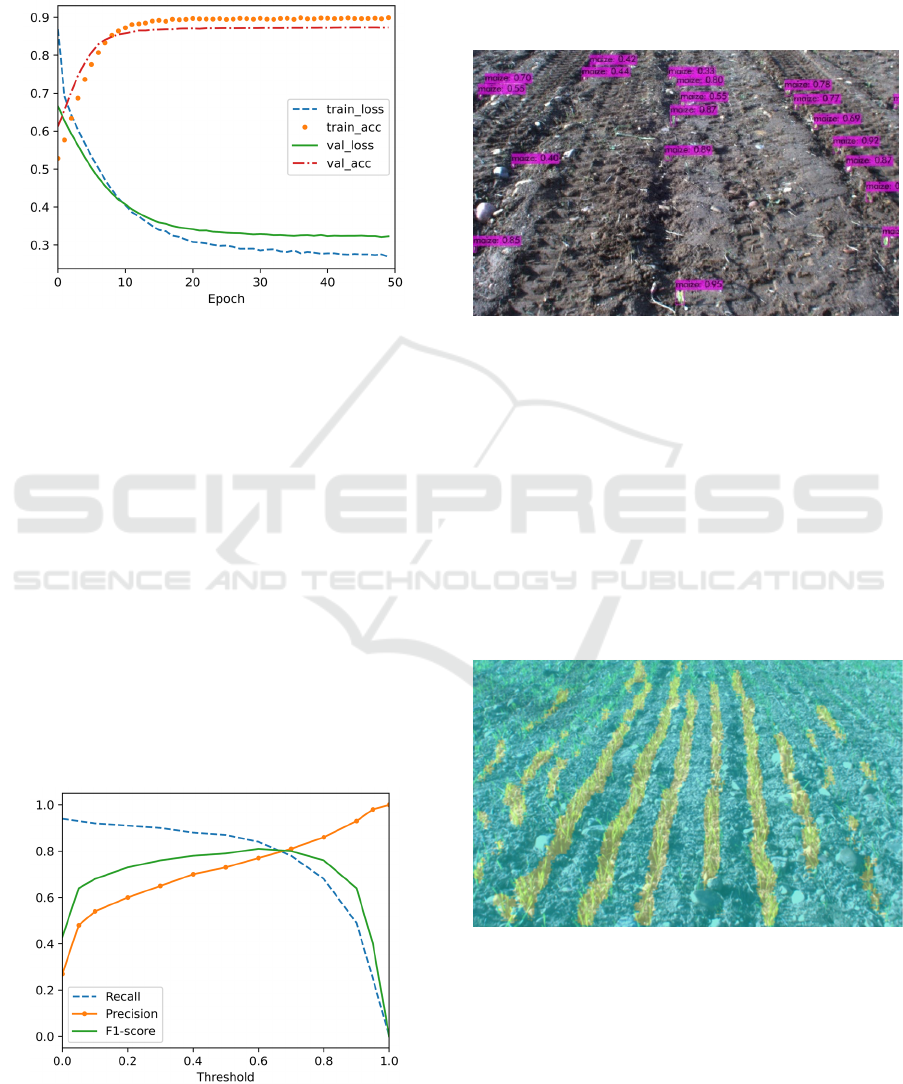
An example of the typical training curves is
presented in Fig. 6, for the training with the
ResNet50-SegNet network, where the loss curves for
both training (train_loss) and validation (val_loss) are
presented.
Figure 6: Example of training curves. Y-axis normalized to
compare loss curves and precision curves.
It can be seen in these curves that the network has
not been overfitted, the validation samples are
representative. Moreover, it can be seen that a point
is reached from which the training loss continues to
decrease, although the validation loss remains the
same. Furthermore, Fig. 6 presents also the accuracy
curves for both train (train_acc) and validation
(val_acc) which shows a proper fit of the model.
On the other hand, regarding object detection in
maize, a YOLOv4 model was selected for crop
identification. Average precision (AP) was the metric
chosen to assess the performance of the model, and
its values for IoU thresholds of 0.25, 0.5, and 0.75
were 0.9168, 0.8478 and 0.1496, respectively. In
addition, the precision and recall metrics have been
calculated for different thresholds, and the
comparative curves are presented in Fig. 7.
Figure 7: Recall, precision and F1-score for different
threshold values. Y-axis normalized.
The threshold is be chosen depending on whether
the recall or precision is desired to be higher, i.e.
whether a higher number of false positives (FP) or
false negatives (FN) is preferred. A trade-off between
precision and recall is selected based on the F1-score,
which is maximal for threshold values of
approximately 0.6.
Figure 8: Output of the object detection model (maize).
In both cases, the models are capable of properly
detecting the crops (see Fig. 8 and Fig. 9), thus
enabling crop line extraction. It is worth mentioning
that for autonomous navigation, the detection of all
crops in a single image is not an essential
requirement, given that strategies such as point
accumulation or particle filters can be applied to
reconstruct the crop line by taking information from
various epochs. In the absence of ground truth of the
row crops, a quantitative evaluation of the error
obtained by the process of crop line extraction is not
feasible.
Figure 9: Output of the segmentation model (wheat).
One could consider that the error will be similar
to the error obtained by other studies that have used a
similar procedure for line extraction, such as the work
presented by Emmi et al., (2021). Although the error
cannot be quantified (because at the time of the tests
the position of each crop was not available), it can be
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
416
clearly established that the presented methodology is
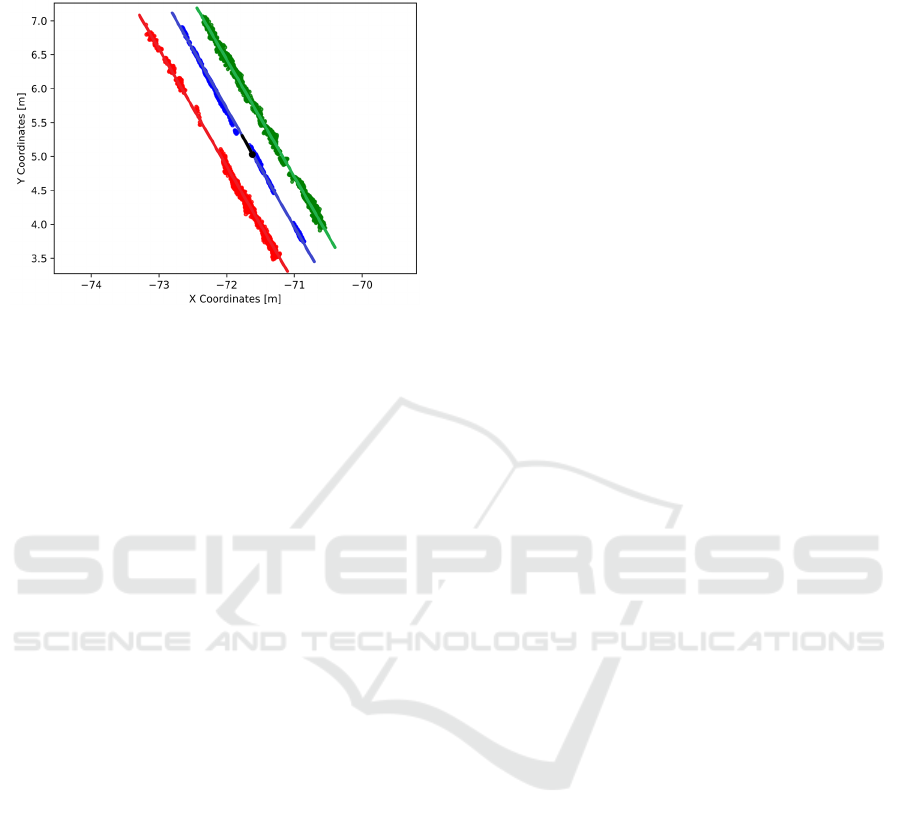
able to identify the crop lines properly (see Fig. 10).
Figure 10: Clustering and lines extraction (maize).
Figure 10 presents the result of the application of
the methodology presented in Fig. 1, and by using a
line extraction such as RANSAC, it is possible to
extract the crop lines for the maize field, where the
position and direction of the mobile platform are
represented in black color in a cartesian coordinate
frame. Finally, the results have shown the
effectiveness of the presented methodology for
autonomous navigation in early-stage crop growth.
5 CONCLUSIONS
A general procedure for crop-row identification in
early-stage growth has been presented. This
methodology seeks not to depend on global
localization systems, which will enable robust
autonomous row following in both wide-row crops and
narrow-row crops. The methodology is based on crop
identification using state-of-the-art deep learning
models, validated in maize and wheat at an early
growth stage, although the methodology can be
extended to many more crops. This approach
demonstrates that it is possible to integrate in a single
methodology the identification and classification of
diverse wide-row and narrow-row crops to estimate the
row lines for later navigation while eliminating the
outliers. The presented method has been validated
using offline data gathered by a robotic platform during
different real working conditions. The results show the
robustness and effectiveness of the methodology in
identifying the crops, and later obtaining the
characterization of the crop lines, even considering
their early stage of growth. The presented approach
will enable the future development of a fully
autonomous navigation system for weed management
using high-power laser technology. Future work will
aim to expand the identification capacity for other
crops, such as sugar beet, which is one of the target
crops of the WeLASER project, as well as to validate
the presented methodology in real time.
ACKNOWLEDGEMENTS
This article is part of a the WeLASER project that has
received funding from the European Union’s Horizon
2020 research and innovation programme under grant
agreement No 101000256.
REFERENCES
Abadi, M., Barham, P., Chen, J., Chen, Z., Davis, A., Dean,
J., Devin, M., Ghemawat, S., Irving, G., Isard, M., &
others. (2016). TensorFlow: A System for Large-Scale
Machine Learning. OSDI, 16, 265–283.
AgreenCulture. (2022). AgreenCulture.
https://www.agreenculture.net/
Ahmadi, A., Halstead, M., & McCool, C. (2021). Towards
Autonomous Crop-Agnostic Visual Navigation in Arable
Fields. ArXiv:2109.11936 [Cs].
Badrinarayanan, V., Kendall, A., & Cipolla, R. (2017).
SegNet: A Deep Convolutional Encoder-Decoder
Architecture for Image Segmentation. IEEE Transactions
on Pattern Analysis and Machine Intelligence, 39(12),
2481–2495.
Bakker, T., van Asselt, K., Bontsema, J., Müller, J., & van
Straten, G. (2011). Autonomous navigation using a robot
platform in a sugar beet field. Biosystems Engineering,
109(4), 357–368.
Benet, B., Lenain, R., & Rousseau, V. (2017). Development
of a sensor fusion method for crop row tracking
operations. Advances in Animal Biosciences, 8(2), 583–
589.
Bochkovskiy, A., Wang, C. Y., & Liao, H. Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detection.
arXiv preprint arXiv:2004.10934.
Bonadies, S., & Gadsden, S. A. (2019). An overview of
autonomous crop row navigation strategies for
unmanned ground vehicles. Engineering in Agriculture,
Environment and Food, 12(1), 24–31.
de Silva, R., Cielniak, G., & Gao, J. (2021). Towards
agricultural autonomy: Crop row detection under varying
field conditions using deep learning. ArXiv:2109.08247
[Cs].
Emmi, L., Le Flécher, E., Cadenat, V., & Devy, M. (2021).
A hybrid representation of the environment to improve
autonomous navigation of mobile robots in agriculture.
Precision Agriculture, 22(2), 524–549.
Ester, M., Kriegel, H.-P., Sander, J., & Xu, X. (1996). A
Density-Based Algorithm for Discovering Clusters in
Toward Autonomous Mobile Robot Navigation in Early-Stage Crop Growth
417

Large Spatial Databases with Noise. Proceedings of the
Second International Conference on Knowledge
Discovery and Data Mining, 226–231.
Fischler, M. A., & Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with
applications to image analysis and automated
cartography. Communications of the ACM, 24(6), 381–
395.
Gai, J., Xiang, L., & Tang, L. (2021). Using a depth camera
for crop row detection and mapping for under-canopy
navigation of agricultural robotic vehicle. Computers and
Electronics in Agriculture, 188, 106301.
García-Santillán, I., Guerrero, J. M., Montalvo, M., &
Pajares, G. (2018). Curved and straight crop row
detection by accumulation of green pixels from images
in maize fields. Precision Agriculture, 19(1), 18–41.
Gonzalez-de-Santos, P., Fernández, R., Sepúlveda, D.,
Navas, E., Emmi, L., & Armada, M. (2020). Field Robots
for Intelligent Farms—Inhering Features from Industry.
Agronomy, 10(11), 1638.
He, K., Zhang, X., Ren, S., & Sun, J. (2015). Deep Residual
Learning for Image Recognition. ArXiv:1512.03385
[Cs].
Hough, P. V. C. (1962). Method and means for recognizing
complex patterns. (US Patent Office Patent No.
3069654).
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D., Wang,
W., Weyand, T., Andreetto, M., & Adam, H. (2017).
MobileNets: Efficient Convolutional Neural Networks
for Mobile Vision Applications. ArXiv:1704.04861 [Cs].
Jiang, G. & Zhao, C. (2010). A vision system based crop rows
for agricultural mobile robot. 2010 International
Conference on Computer Application and System
Modeling (ICCASM 2010), V11-142-V11-145.
Jiang, G., Wang, Z., & Liu, H. (2015). Automatic detection
of crop rows based on multi-ROIs. Expert Systems with
Applications, 42(5), 2429–2441.
Kanagasingham, S., Ekpanyapong, M., & Chaihan, R.
(2020). Integrating machine vision-based row guidance
with GPS and compass-based routing to achieve
autonomous navigation for a rice field weeding robot.
Precision Agriculture, 21(4), 831–855.
Lan, Y., Geng, L., Li, W., Ran, W., Yin, X., & Yi, L. (2018).
Development of a robot with 3D perception for accurate
row following in vineyard. International Journal of
Precision Agricultural Aviation, 1(1), 14–21.
Lucid Vision Labs. (2022). Lucid Vision Labs.
https://thinklucid.com/
Mavridou, E., Vrochidou, E., Papakostas, G. A., Pachidis, T.,
& Kaburlasos, V. G. (2019). Machine Vision Systems in
Precision Agriculture for Crop Farming. Journal of
Imaging, 5(12), 89.
Oliveira, L. F. P., Moreira, A. P., & Silva, M. F. (2021).
Advances in Agriculture Robotics: A State-of-the-Art
Review and Challenges Ahead. Robotics, 10(2), 52.
Otsu, N. (1979). A Threshold Selection Method from Gray-
Level Histograms. IEEE Transactions on Systems, Man,
and Cybernetics, 9(1), 62–66.
Ponnambalam, V. R., Bakken, M., Moore, R. J. D., Glenn
Omholt Gjevestad, J., & Johan From, P. (2020).
Autonomous Crop Row Guidance Using Adaptive
Multi-ROI in Strawberry Fields. Sensors, 20(18), 5249.
Rakhmatulin, I., & Andreasen, C. (2020). A Concept of a
Compact and Inexpensive Device for Controlling Weeds
with Laser Beams. Agronomy, 10(10), 1616.
Redmon, J. (2013). Darknet: Open Source Neural Networks
in C. http://pjreddie.com/darknet/
Redmon, J., & Farhadi, A. (2018). YOLOv3: An Incremental
Improvement. ArXiv:1804.02767 [Cs].
Romeo, J., Pajares, G., Montalvo, M., Guerrero, J. M.,
Guijarro, M., & Ribeiro, A. (2012). Crop Row Detection
in Maize Fields Inspired on the Human Visual
Perception. The Scientific World Journal, 2012, 1–10.
Ronneberger, O., Fischer, P., & Brox, T. (2015). U-Net:
Convolutional Networks for Biomedical Image
Segmentation. ArXiv:1505.04597 [Cs].
Sarmento, J., Silva Aguiar, A., Neves dos Santos, F., &
Sousa, A. J. (2021). Autonomous Robot Visual-Only
Guidance in Agriculture Using Vanishing Point
Estimation. In G. Marreiros, F. S. Melo, N. Lau, H. Lopes
Cardoso, & L. P. Reis (Eds.), Progress in Artificial
Intelligence (Vol. 12981, pp. 3–15). Springer
International Publishing.
Shalal, N., Low, T., McCarthy, C., & Hancock, N. (2013). A
review of autonomous navigation systems in agricultural
environments.
Wei, C., Li, H., Shi, J., Zhao, G., Feng, H., & Quan, L.
(2022). Row anchor selection classification method for
early-stage crop row-following. Computers and
Electronics in Agriculture, 192, 106577.
Simon, N. A., & Min, C. H. (2020). Neural Network Based
Corn Field Furrow Detection for Autonomous
Navigation in Agriculture Vehicles. 2020 IEEE
International IOT, Electronics and Mechatronics
Conference (IEMTRONICS), 1–6.
WeLASER. (2022). WeLASER Project: Eco-Innovative
weeding with laser. https://welaser-project.eu/
Winterhalter, W., Fleckenstein, F. V., Dornhege, C., &
Burgard, W. (2018). Crop Row Detection on Tiny Plants
With the Pattern Hough Transform. IEEE Robotics and
Automation Letters, 3(4), 3394–3401.
Woebbecke, D. M., G. E. Meyer, K. Von Bargen, & D. A.
Mortensen. (1995). Color Indices for Weed Identification
Under Various Soil, Residue, and Lighting Conditions.
Transactions of the ASAE, 38(1), 259–269.
Zadoks, J. C., Chang, T. T., & Konzak, C. F. (1974). A
decimal code for the growth stages of cereals. Weed
Research, 14(6), 415–421.
Zhang, X., Li, X., Zhang, B., Zhou, J., Tian, G., Xiong, Y., &
Gu, B. (2018). Automated robust crop-row detection in
maize fields based on position clustering algorithm and
shortest path method. Computers and Electronics in
Agriculture, 154, 165–175.
Zhao, H., Shi, J., Qi, X., Wang, X., & Jia, J. (2017). Pyramid
Scene Parsing Network. ArXiv:1612.01105 [Cs].
Zhao, X., Tong, C., Pang, X., Wang, Z., Guo, Y., Du, F., &
Wu, R. (2012). Functional mapping of ontogeny in
flowering plants. Briefings in Bioinformatics, 13(3),
317–328.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
418
