
Control-relevant Model Selection for Multiple-mass Systems
∗
Mathias Tantau
1 a
, Torben Jonsky
2 b
, Zygimantas Ziaukas
1 c
and Hans-Georg Jacob
1 d
1
Institute of Mechatronic Systems, Leibniz University Hannover, An der Universit
¨
at 1, 30823 Garbsen, Germany
2
Lenze SE, Hans-Lenze-Str. 1, 31855 Aerzen, Germany
Keywords:
Control-relevant Model Selection, Model-based Control, Multiple-mass Systems, Non-parametric Models,
Modelless Simulation.
Abstract:
Physically motivated parametric models are the basis of several techniques related to control design. Industrial
model-based controller tuning methods include pole placement, symmetric optimum and damping optimum.
The challenge is that the resulting model-based controller is satisfactory only if the underlying model is ap-
propriate. Typically, a set of potential models is known a priori, but it is not known, which model should be
used. So, the critical question in model-based controller tuning is that of model selection. Existing approaches
for model selection are mostly based on maximizing accuracy, but there is no reason why the most accurate
model should also be the optimal model for control design. Given the overall aim to design a high-performance
controller, in this paper the best model is considered as the one that has the potential to give a model-based
controller the highest performance. The proposed method identifies parametric candidate models for control
design. Then, a nonparametric model is used to predict the actual performance of the various controllers on
the real system. A validation with two industry-like testbeds shows success of the method.
1 INTRODUCTION
Physically motivated parametric models with inter-
pretable inner structure combine prior knowledge
with identification measurements. These bright-grey
box models are the basis of several techniques related
to control design (Sch
¨
utte, 2003), observers, feed-
forward and model-based fault diagnosis (Witczak
et al., 2002).
The advantages of defining control parameters on
the basis of physically motivated models as opposed
to black-box models or completely model-free de-
signs include:
1. simplicity, transparency,
2. online adaptability to changing parameters and
model reference adaptive control (Khan et al.,
2013; Riva et al., 2016),
a
https://orcid.org/0000-0003-1195-7329
b
https://orcid.org/0000-0002-0512-1253
c
https://orcid.org/0000-0001-9161-0709
d
https://orcid.org/0000-0001-5605-9704
∗
This work was carried out as part of the research
project ”Automated Control Design based on (partly) au-
tomatically generated, Control-optimal Models” (FVA 665
IV), sponsored by the German Forschungsvereinigung
Antriebstechnik e.V. (FVA)
3. optimality, e.g. pole placement, settling time,
4. predictability of robustness to changing system
parameters,
5. low number of hyperparameters in the design, as
opposed to modern H
∞
control (Toscano and Ly-
onnet, 2009).
In the industrial field of servo system control sev-
eral model-based methods are widely known, but nev-
ertheless model-less methods such as Ziegler-Nichols
are still used to set the control parameters in most
cases. A reason is that the selection of an appropri-
ate model among a set of known candidates is a major
difficulty and performance of model-based controllers
hinges critically on the suitabiliy of their models. For
example, it may not be known a priori if elasticities
in the structure should be considered or if they can be
neglected. An attempt to perform a model selection
including mulitple-mass systems, backlash and fric-
tion is delineated in (Sch
¨
utte et al., 1997), but it is
not fully automatic. Models for control design tend
to be rather simple, including only a few parameters.
It is therefore important that the most dominant char-
acteristics are identified as such which would require
considerable effort and expert knowledge in practice
if this task was performed manually. Especially when
specialized systems such as stacker cranes, position-
Tantau, M., Jonsky, T., Ziaukas, Z. and Jacob, H.
Control-relevant Model Selection for Multiple-mass Systems.
DOI: 10.5220/0011231200003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 605-615
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
605

ing systems and individual machine tools are commis-
sioned in small quantities, model development comes
at a comparatively high cost.
Methods for automatic model selection have been
described (Aguilar et al., 2001; Tantau et al., 2020;
Brun et al., 2001), which are mostly based on pre-
diction accuracy as a sole criterion for goodness of
the model, possibly in combination with parsimony
requirements. Commonly, several models are identi-
fied and the one with the best fit on a separate vali-
dation dataset is nominated as the optimal model. In-
stead of separate validation data information criteria
can be used (Chatfield, 1995). For servo systems with
high quality actuators and sensors it can be expected
that these stochastic criteria result in overly complex
models, unlike the simple models known from control
design. This suggests that accuracy is not a suitable
model selection criterion in view of control design.
A control-relevant criterion for model selection
is required. In the field of parameter identifica-
tion control-relevant cost functions have been de-
fined (identification for control) (Van Den Hof and
Schrama, 1994; Hjalmarsson et al., 1996; Van den
Hof, 1997; Gevers, 2004; Jansson, 2004; Codrons,
2005; Saha et al., 2021). Mostly, the overall aim is
seen as to design a model-based controller with high
performance on the real system and accordingly the
optimal model is defined as the one with lowest per-
formance degradation from model to real system or
good worst-case performance (among other require-
ments). The cost function considers a given controller
transfer function (Oomen et al., 2013) or if the con-
troller transfer function is not known yet at the stage
of identification, not even approximately, the ν-gap
metric is used for identification which allows to re-
place this knowledge by worst-case statements (Date
and Vinnicombe, 2004; Geng et al., 2015; Yang et al.,
2018).
One way to extend identification for control to
model selection would be to use these control-relevant
cost functions also for selection of the best model.
This has been done in a few cases, see for example
(van Herpen et al., 2010; van Herpen et al., 2011;
Tacx et al., 2021; Tantau et al., 2022). This would
favour again the most accurate models, where accu-
racy is measured in a special, control-relevant way.
A slightly different approach is to also evaluate the
nominal performance that can be achieved with each
model, not only the performance degradation. This
has already been considered in these references. In
this sense the best model is the one with the poten-
tial to give a model-based controller the best perfor-
mance on the real system. With this reasoning, the
best model is not necessarily the most accurate one.
In this paper the idea of selecting the model that
gives a model-based controller the highest perfor-
mance is adopted, but the solution approach is very
different, adopted to physically motivated models and
common, industrial control design rules rather than
H
∞
-control. We propose to perform parameter identi-
fication for a couple of parametric models in a first ex-
periment. Then, several commonly known controllers
are parametrized for each model. Finally, the differ-
ent resulting controller settings are validated on a non-
parametric model in order to predict their stability and
performance on the real system without actually car-
rying out hardware experiments, see below. The con-
troller with the best performance defines the optimal
model as the one that it is based on. Assuming that for
each model the most promising controllers are tested,
this procedure should output the model with potential
to give a model-based controller the highest perfor-
mance. What should facilitate applying this approach
in industry, is that it is close to well known and es-
tablished control design methods. The model selec-
tion strategy is similar to a manual model selection
but more systematic and it requires less hardware ex-
periments.
2 SET OF MODEL-BASED
CONTROLLERS
In this section several commonly used model-based
PI-controllers for speed control of electric motors
with coupled mechanics are introduced briefly. They
will be considered in the model selection of Sec. 4.
Further details and derivations can be found in the
cited references. Nonlinear characteristics are left out
because the proposed method for model selection, see
Sec. 3, can only handle transfer function models. The
underlying transfer function models are identified in
a first experiment as candidate models.
2.1 Symmetric Optimum for Systems
with Delay Time
If elasticities in the mechanics can be neglected and
the overall inertia of motor and load J
sum
is the only
parameter that describes the mechanics, a valid plant
model is given by:
G(s) =
1
sJ
sum
(1 + T
1
s)
. (1)
T
1
accounts for the limited sampling frequency in the
current controller and the velocity measurement filter.
In this case the PI-speed controller can be tuned ac-
cording to the symmetric optimum in a way that the
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
606
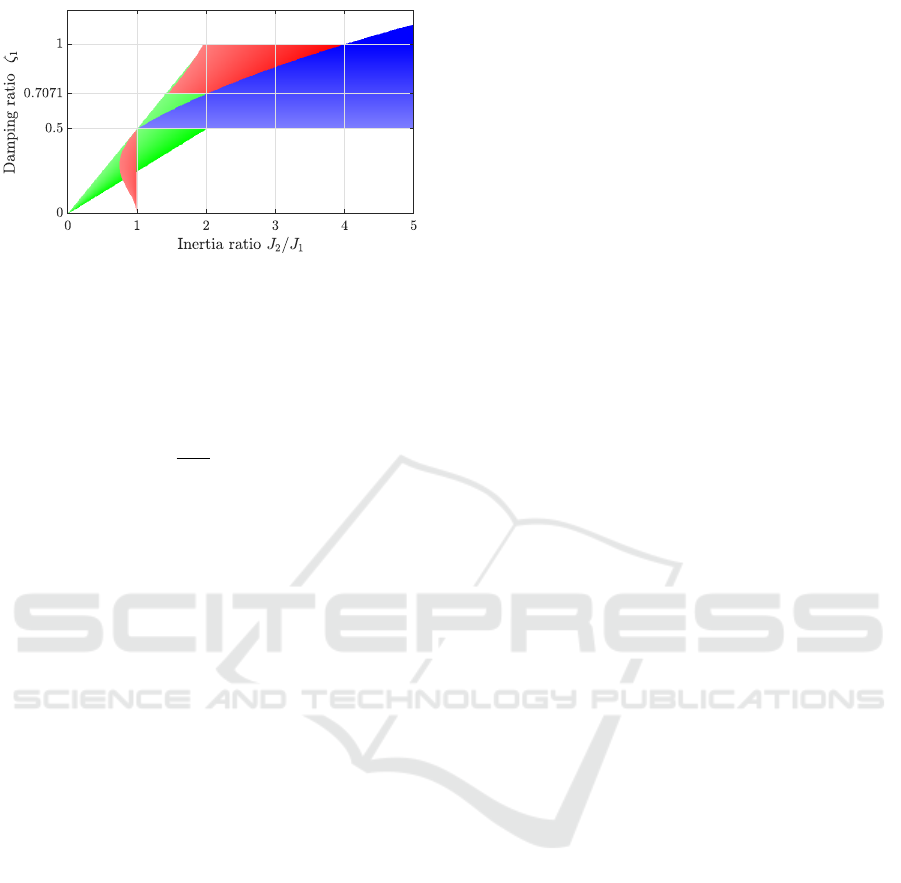
Figure 1: Chosen pole placement principles for 2-mass-
systems. Blue: identical damping, red: identical real part,
green: identical radius. When more than one principle is
possible, identical damping is preferred over identical real
part over identical radius.
zero-crossing frequency coincides with the maximum
phase (Tripathi et al., 2015):
K
P
=
J
sum
aT
1
, T
I
= a
2
T
1
. (2)
a is a free parameter with the relation to the Lehr’
damping ratio D of the closed-loop poles a = 2D + 1.
a = 2 corresponds to optimal performance but a =
3 is more robust (Schr
¨
oder, 2015). In the following
experiments a = 3 is chosen.
Alternatively, the symmetric optimum can be de-
signed for the first mass only of an elastically cou-
pled system as a simple way to account for elasticity
and transition elements with unknown properties such
as belt drives and gear boxes. More advanced meth-
ods for mulitple mass system control design are given
next.
2.2 Pole Placement for 2-mass-systems
Zhang (Zhang and Furusho, 2000) argues that for the
two pole pairs of a controlled 2-mass-system there are
three reasonable pole placement objectives: identical
damping, identical real part and identical radius. De-
pending on the ratio of load inertia divided by motor
inertia R = J
2
/J
1
and the damping specified for the
first pole pair ζ
1
these objectives may be achievable
or not, see Fig. 1. In the figure a certain objective
is considered achievable only if the damping ratio re-
sulting for the second pole pair is 0.5 or more. For
details see (Zhang and Furusho, 2000).
2.3 Optimal Damping Design for 2- or
3-mass-systems
Another popular controller design method, that has
been used with 2-mass-systems, is the optimal damp-
ing design (Wertz and Schutte, 2000). It is based on
specifying double ratios. To obtain these the denomi-
nator polynomial of the closed control loop is written
in the form
P(s) = a
n
s
n
+ ··· + a
1
s + a
0
. (3)
Adjacent coefficients have the ratios V
i
=
a
i
/(a
i−1
),i = 1 . ..n. The double ratios are de-
fined as V
i
/V
i−1
= a
i
a
i−2
/a
2
i−1
,i = 2 . ..n, while
the reciprocal values are sometimes called stability
indices (Manabe, 1998). In (Manabe, 1998) it is
recommended to aim for D
n−1
= · ·· = D
2
= 0.5 and
D
1
= 0.4, as this gives the controlled system the
properties of low overshooting, short settling time
and a pole arrangement combining identical damping
and identical real part. The control parameters can be
chosen in fulfilment of these equations. If required,
another defining equation can be generated by also
specifying the system time V
n
= a
n
/a
n−1
(Schr
¨
oder,
2015).
In the case of 2-mass-system speed control with
PI-controller the denominator polynomial has five co-
efficients and three double ratios. Only the first two
double ratios are specified to determine the two con-
trol parameters, because they are known to be more
important than the last double ratios (Sch
¨
utte, 2003).
Out of the solutions one with positive real values is
chosen which may not always exist.
For 3-mass-systems five double ratios exist and
only two control parameters. Only the first two damp-
ing ratios are defined directly while the last three can
assume arbitrary values.
3 MODEL SELECTION
PROCEDURE
Having defined the candidate models and controllers
in the preceding section this section explains the
model selection procedure, starting with an overview
followed by a more detailed description of certain
points.
3.1 Description of the Model Selection
Method
The procedure can be outlined as follows:
1. Parameter identification for a set of physically
motivated candidate models based on a measured
frequency response function (FRF) of the system
2. Model-based control design / parametrization, as
described in Sec. 2. For each model all potential
controllers are parametrized.
Control-relevant Model Selection for Multiple-mass Systems
607

3. Verification of all controllers via nonparametric
models, as described in this section. The model
corresponding to the best controller will be the
best model.
4. Hardware tests of the resulting controller settings.
The parameter identification minimizes the sum of
squared errors between model and plant FRF over all
measured frequencies in the simplest case. The plant
FRF, which is needed for this step, should be mea-
sured in a way that artefacts from the closed control
loop are kept low, for example by inserting the excita-
tion at r
1
in Fig. 2, while the controller is disabled. In
the second step, if a certain controller cannot be pa-
rameterized for the given model parameters, e.g. be-
cause the control parameters would be complex, it is
left out.
In the third step the various controllers are tested
on a nonparametric model in order to predict their
stability and performance on the real system without
actually carrying out hardware experiments. It is as-
sumed that for each model the most promising con-
trollers are considered. Then, the best controller de-
fines its model as the one that can give a model-based
controller the highest performance.
Performance should not be measured in combina-
tion with the model that a certain controller is opti-
mized for, because this would be a trivial test; the
performance would be ideal mostly. Instead, condi-
tions should be close to performing verification ex-
periments on the real hardware. This leads to the ap-
plication of complex, nonparametric models. Exam-
ples of nonparametric models are the impulse or step
response or the frequency response function (FRF).
Stability is checked by evaluating the Nyquist cri-
terion for the open loop consisting of plant FRF and
controller transfer function.
Furthermore it would be desirable to know the
step response so as to evaluate settling time, over-
shooting and integral criteria as performance mea-
sures. Time-domain signals are more intuitive for
many operators. The step response can be calcu-
lated from the system’s FRF, as explained in the next
section, so that a nonparametric model is available
for this kind of validation, too. Alternatively, time-
domain signals could be obtained from the convolu-
tion of the system’s impulse response (Risuleo, 2016).
Because of the linear nature of the transfer func-
tion nonlinear plant characteristics, e.g. friction,
backlash, and saturation cannot be considered explic-
itly and it is expectable that the methods fail if they
are dominant. Extensions to nonlinear models such
as long short-term memory networks would be con-
ceivable but the experimental effort for training seems
inappropriate for simple PI control design.
3.2 Step Response from
Frequency-domain Measurements
As an evaluation of the model-based controllers with
a nonparametric model step responses are calculated
numerically. Using the measured FRF of the sys-
tem together with the calculated transfer function
(tf) of the controller this is a question of converting
frequency-domain responses into a time-domain sig-
nals.
This could be done via inverse Laplace trans-
form by calculating the Bromwich inversion integral
(Grassmann, 2013):
f (t) = −
1
2πi
Z
c+i∞
c−i∞
F(s)e
st
ds, (4)
in which c is a constant larger than the maximum real
part of the poles of the Laplace transform F(s). Meth-
ods for the numerical approximation of the integral
can be found for example in (Hosono, 1981; Abate
and Whitt, 2006; G
´
omez et al., 2007).
However, from the FRF the transfer function is
only known for c = 0. Setting c = 0 the Fourier trans-
form results (Grassmann, 2013):
f (t) =
1
2π
Z
∞
−∞
F(iω)e
iωt
dω. (5)
Practically, it must be approximated via sum or trape-
zoidal integration method and only a finite maximal
frequency can be considered. Further simplifications
can be made if the time signal at negative times is not
of interest, which is usually the case for causal sys-
tems (Tan et al., 2017).
The restriction to c = 0 forbids to calculate the
time signal of transfer functions with nonnegative
poles, for example undamped resonating systems or
the s in the denominator introduced by the step excita-
tion. Put differently, the signal in time must decay. It
is therefore usually easiest to reconstruct the impulse
response at first and to integrate it afterwards.
Another approach is to replace the step excitation
by a periodic, mean-free square wave, e.g. periodic
steps from −1 to 1 and from 1 to −1 and to assume
that the system has been exposed to this excitation for
a long time already. Now the system response h(t)
is periodic and can be calculated by means of Fourier
series expansion, see derivation in (Tan et al., 2017):
h(t) =
4
π
∞
∑
k=1(2)
1
k
Re
{
F(ikω
s
)
}
sin(kω
s
t). ..
+
1
k
Im{F(ikω
s
)}cos(kω
s
t).
(6)
F(ikω
s
) refers to the system for which the step re-
sponses are of interest. In the context of controller
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
608

validation F(ikω
s
) is a spectral line of the closed feed-
back loop of plant and controller. The 2 in brack-
ets means that every second frequency component is
skipped. Note that the frequency component 0 is not
evaluated, which in contrast to some other methods
also allows to calculate the system response of sys-
tems with one pole in the origin, but the calculated
system response is not quite correct in this case be-
cause initial conditions are neglected. These could
lead to an arbitrary offset on the output which is not
considered, instead h(t) is always centred around 0.
Apart from that the system should be stable.
Out of the step responses from −1 to 1 the step
responses from 0 to 1 or between two other con-
stants can be calculated by scaling the obtained re-
sults, as long as the (controlled) system has a limited
and known static gain: The output offset will be the
input offset times the static gain and the output ampli-
tude will be the input amplitude times the static gain.
This is related to the linearity of the considered sys-
tems, so an offset in the input will lead to a constant
offset of known height in the output after settling mo-
tions have decayed. For an integrator the condition of
a static gain is violated as the static gain is infinite.
This method can be implemented efficiently with
the Matlab function ifft leading to short calculation
times.
Because in first experiments the integration of the
impulse response showed to be inaccurate, in the fol-
lowing only the Fourier series method with square
wave excitation is used, the accuracy of which will be
demonstrated in Sec. 4. It is known that the conver-
sion from frequency-domain measurements to time-
domain signals is generally unstable and especially
high-frequency oscillations can be introduced by mi-
nor errors in the measured transfer function (Doetsch,
1985). So the accuracy of the step response recon-
struction will be pivotal in the remainder of the paper.
3.3 Calculation of the Closed-loop
System Response in
Frequency-domain
The Fourier transform of the closed-loop control sys-
tem, which is needed in (6), could be calculated from
the plant FRF P(iω) identified in open loop and the
known controller TF C
dest
(s) (SISO case):
G
cl,dest
(iω) =
P(iω)C
dest
(iω)
1 + P(iω)C
dest
(iω)
. (7)
For the setup in Fig. 2 this means that r
1
is used to
inject the excitation while C(iω) is set to zero.
However, calculating the closed loop in this way
would be inaccurate because the exact behaviour of
Figure 2: Control loop after (Van Den Hof and Schrama,
1994) with controller C(iω), plant P
0
(iω), output y, mea-
surement noise v and two possible excitations r
1
and r
2
.
the industrial drive C
dest
is not known in detail (filters,
resampling, time delay, etc.).
Instead, the closed loop is measured directly
with excitation at r
2
for a given, working controller
C
origin
(iω), which is ideally close to the controller
to be designed, for example the default setting pro-
vided by the manufacturer. Calling this measured
FRF G
cl,origin
(iω) the system’s FRF is extracted via:
P(iω) =
G
cl,origin
(iω)
C
origin
(iω)(1 − G
cl,origin
(iω))
. (8)
Then the closed loop FRF is calculated for the to be
designed controller via (7), using P(iω) from (8). In
this way the closed-loop FRF is still relatively accu-
rate, even if the true controller transfer functions are
not known exactly, at least when C
origin
and C
dest
are
close. If they are even identical, insufficient knowl-
edge about filters, resampling, time delay, etc will not
lead to any errors. P(iω) contains some of these dis-
tortions and is therefore not useful if one is interested
in the FRF of the system alone.
This approach is in agreement with the claim of
’identification for control’, which dictate to measure
a system or to identify a model in a way that is close
to the intended use of the model, resp. measurement.
For example, if a model is needed for closed-loop
predictions it should also be measured in closed loop
(Gevers and Ljung, 1986; Van Den Hof and Schrama,
1994; Hjalmarsson et al., 1996; Van den Hof, 1997;
Vinnicombe, 2001).
If at low frequencies G
cl,origin
(iω) is close to one
or exactly one, then (8) cannot be calculated directly.
In this case it is sufficient to note that P(iω) is a very
high number.
4 EXPERIMENTAL RESULTS
This section is intended to demonstrate the model
selection procedure and the calculation of step re-
sponses from controller transfer function and non-
parametric system model.
Control-relevant Model Selection for Multiple-mass Systems
609

(a) Positioning stage with load on leaf springs
(b) Stacker crane
Figure 3: Experimental testbeds.
4.1 Testbeds
Validation experiments are carried out on the two
testbeds shown in Fig. 3. In the positioning stage a
synchronous motor is connected to a toothed belt in
direct drive moving a gantry with adjustable load. In
addition, an extra load is mounted on leaf springs.
The stacker crane has a mast height of 5.6 m and
the x-axis is 5 m long. All three axes are driven
by synchronous motors with gearboxes and toothed
belts. Experiments are carried out on the x-axis be-
cause due to mast oscillations and the elastic belt this
is the most challenging control design task. The y-
axis is positioned constantly at 2000 mm, 0 being the
bottom end.
In both setups the motors are equipped with re-
solvers on the motor axis for position and veloc-
ity measurement. All motors, sensors and drives
are of-the-shelf products from the company Lenze,
which brings about a cascaded control structure (cur-
rent, velocity, position). Position control is disabled,
while the speed controller’s TF is given by C(s) =
K
P
(1 + 1/(T
I
s)). Its output is a torque, which is cal-
culated into a current with the motor constant. Addi-
tional notch filters could be tuned for the commanded
current but this possibility is not utilized here. The
current controller is parametrized as recommended by
the manufacturer.
4.2 Reconstruction of the Step Response
from Frequency-domain
Measurements
Before the results of the model selection are shown,
the reconstruction of step responses for different con-
troller settings is verified along measurements on the
positioning stage testbed. The results for the stacker
crane look similar, but they are not shown for the sake
of brevity.
Following Sec. 3.3 and (8) the closed-loop FRF
from desired velocity r
2
to actual velocity has been
measured for K
P
= 0.0186 Nm, T
I
→ ∞ one time with
stepped sine, stepping from 0.5Hz to 500Hz. On
this basis step responses have been reconstructed as
described in Sec. 3.2 and Sec. 3.3 for different con-
troller settings with the square wave method and al-
ternating steps between −1 and 1. The base fre-
quency is 0.5 Hz, so steps in either direction occur at
1Hz. Fig. 4, 5, and 6 show the resulting calculated
step responses along with actually measured step re-
sponses for the respective controller settings. In or-
der to qualitatively demonstrate the effect of nonlin-
earities and disturbances, two different step heights
are shown each. For better comparison the calculated
step responses are scaled to the same speed range as
the measurements. Scaling is possible here because
the static gain is known to be 1.
It can be seen that the calculated step responses
resemble the measurements (overshooting, settling
time, frequency of vibration) quite well. A notewor-
thy difference is the remaining oscillation in the mea-
surement. This oscillation is synchronous with the
motor angle (four peaks per revolution) and is there-
fore not part of the settling motion but rather a cause
of a slight commutation misalignment of the current
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
610
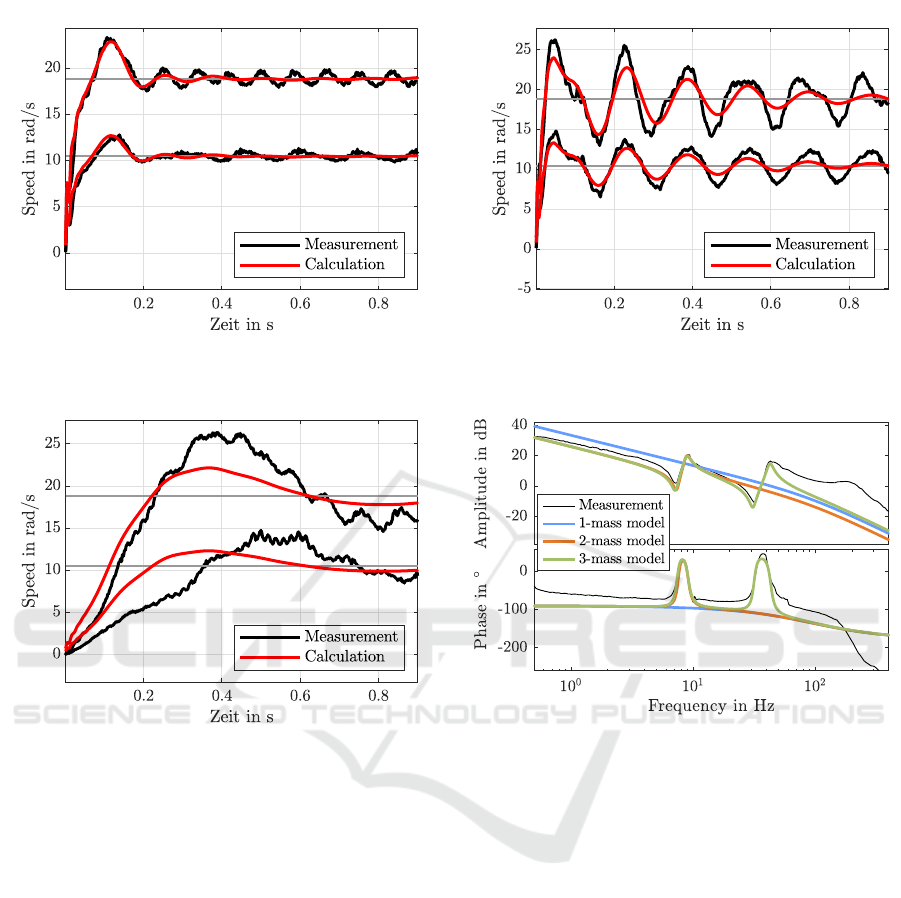
Figure 4: Measured and calculated step responses for two
different step heights, K
P
= 0.0186 Nm/rpm, T
I
→ ∞.
Figure 5: Measured and calculated step responses,
K
P
= 0.00186 Nm/rpm, T
I
→ ∞.
measurement. It shows the disturbance rejection /
amplification property, not the settling motion. Dif-
ferences between the measurements for different step
heights caused by nonlinearity can clearly be seen, es-
pecially for t > 1 s in Fig. 6. Deviations of this size
should therefore also be expected between calculation
and measurement. In Fig. 5 the overshooting is not
captured precisely. This shows the lack of accuracy if
C
origin
and C
dest
differ significantly in their controller
settings (here factor 10).
4.3 Model Selection for the Positioning
Stage Testbed
The identification of multiple mass models is carried
out by inserting an excitation at r
1
, see Fig. 2, while
position control is disabled and the speed control is
kept at a low bandwidth (proportional gain set to a
factor 100 below the usual value). Because of the low
bandwidth it can be ensured that every frequency line
Figure 6: Measured and calculated step responses,
K
P
= 0.0186 Nm/rpm, T
I
= 14 ms.
Figure 7: Plant FRF and identified models for the position-
ing stage.
is excited sufficiently and the experiment is close to an
open-loop experiment, leading to a smooth FRF mea-
surement without significant closed-loop bias. The
speed controller still prevents drifting of the integrat-
ing system.
A known PT1 element is included in all TF mod-
els with time constant T
1
to account for the known
sensor low-pass filter and current control, although a
PT2 model would be more accurate. The known time
constant is T
1
= 1.7ms, 1.2ms as sensor filter time
constant and 0.5ms for the current control.
Plant input and output (current and velocity) are
evaluated with the G
¨
ortzel algorithm (Sysel and Ra-
jmic, 2012) over several periods to average out mea-
surement noise. The three different models shown
in Fig. 7 have been identified by minimizing the
mean squared distance in the complex plane over all
recorded frequencies via particle swarm optimization.
It can be seen that the 3-mass model fits best but at
high frequencies a bias occurs in all models.
Based on these models the various controllers are
Control-relevant Model Selection for Multiple-mass Systems
611
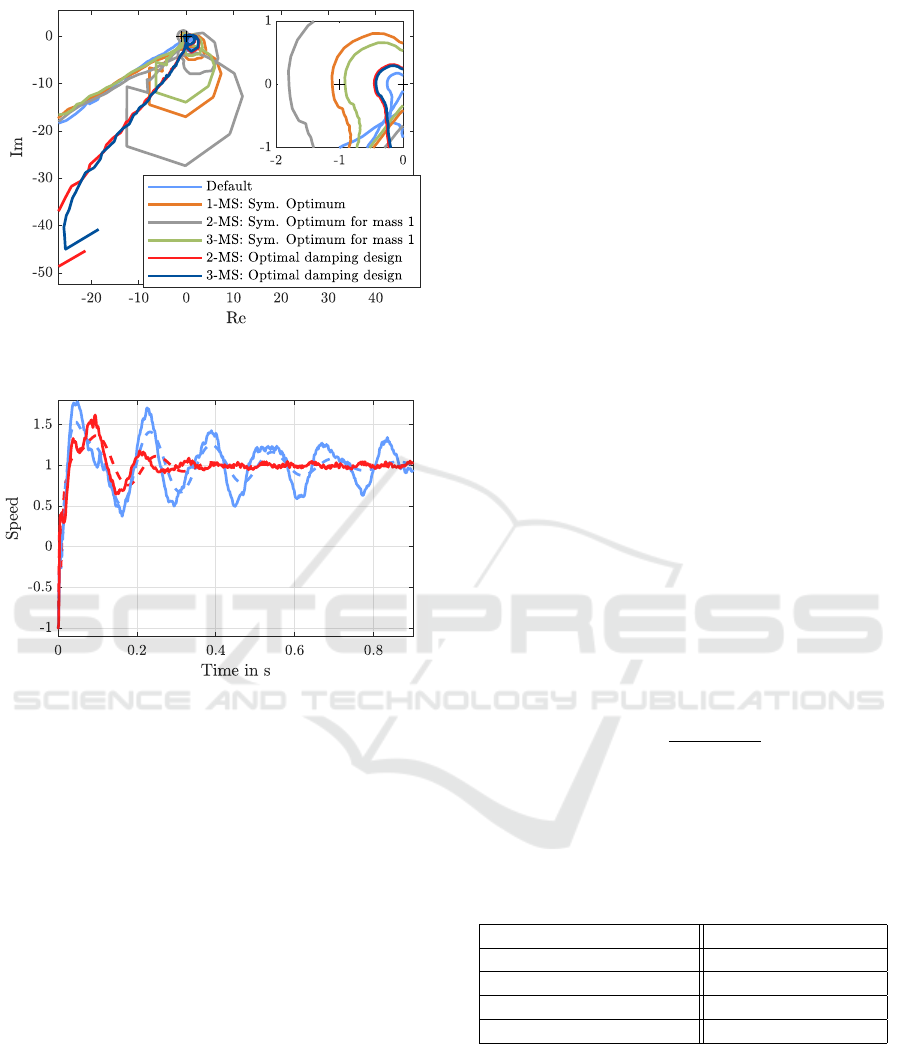
Figure 8: Nyquist plot for the considered set of model-based
controllers, positioning stage testbed.
Figure 9: Calculated step responses for those settings that
where approved in Fig. 8 (dashed) and corresponding mea-
surements (continuous). The colours correspond to Fig. 8.
calculated. The pole placement methods for 2-mass
systems described in Sec. 2.2 could not be applied
because the inertia ratio of the identified 2-MS is
≈ 0.5 < 1.0.
In Fig. 8 the open-loop FRFs are shown as a first
validation step. In addition, the default controller set-
ting, provided by the manufacturer is shown for com-
parison. It is optimized for running the motor without
load.
It can be seen that the symmetric optimum vari-
ants have insufficient gain margin. For this rea-
son only the remaining three settings are further in-
vestigated by calculating the step response from the
closed-loop FRF, measured with default controller
settings, see Fig. 9. The colours correspond to Fig. 8.
Actually measured step responses are shown for com-
parison, normalized to steps form −1 to 1. Because
the red and the dark blue curve could hardly be dis-
tinguished, only the red curve is plotted.
Comparing the measured and calculated step re-
sponses it can be said that the frequency of oscillation
and the decay ratio are in good agreement, whereas
the overshoot is underestimated. Nevertheless, the
evaluation of calculated step responses allows a first
estimate. The exact shape of the step responses de-
pends also on the step height due to nonlinearities, as
shown in Sec. 4.2 and is therefore not captured pre-
cisely by the linear method.
Comparing the different control settings it can be
seen that the optimal damping design achieves a clear
improvement over the default setting and also the 1-
mass model would not be appropriate. However, there
is no clear answer to whether the 2-mass model or the
3-mass model should be favoured, because in this case
both optimal damping designs lead to similar control
parameters and therefore also similar performance.
4.4 Model Selection for the Stacker
Crane Testbed
Repeating the same workflow for the stacker crane
testbed Fig. 10 shows the open loop locus for a num-
ber of control settings, see legend in Fig. 11. Some
curves are not shown to keep the figure clean. The
latter figure shows the calculated step responses. Er-
ror norms for the four admissible controller settings
(sufficient gain margin in Fig. 10) are given in Tab. 1.
The error norms for discrete-time signal y
k
are defined
as follows:
L
1
=
∑
k
|y
k
− 1|, (9)
L
2
=
r
∑
k
(y
k
− 1)
2
, (10)
overshooting = max
k
(y
k
− 1). (11)
Table 1: Performance criteria for the calculated step re-
sponses in m/s, stacker crane.
L
1
L
2
overs.
Default setting 114 5.7 0.344
3-MS: Sym. Optimum 76 3.88 0.199
2-MS: Optimal damping 111 6.73 0.299
3-MS: Optimal damping 142 8.22 0.238
Which controller and accordingly which model
should be selected depends on the requirements of the
application, but in this case it can be said that the sym-
metric optimum design based on the third mass of a
3-mass system is superior in all error norms. So, the
control-optimal model for this testbed is clearly the
3-mass model.
A comparison of measured and calculated step re-
sponses is shown in Fig. 12. The overall shape is in
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
612
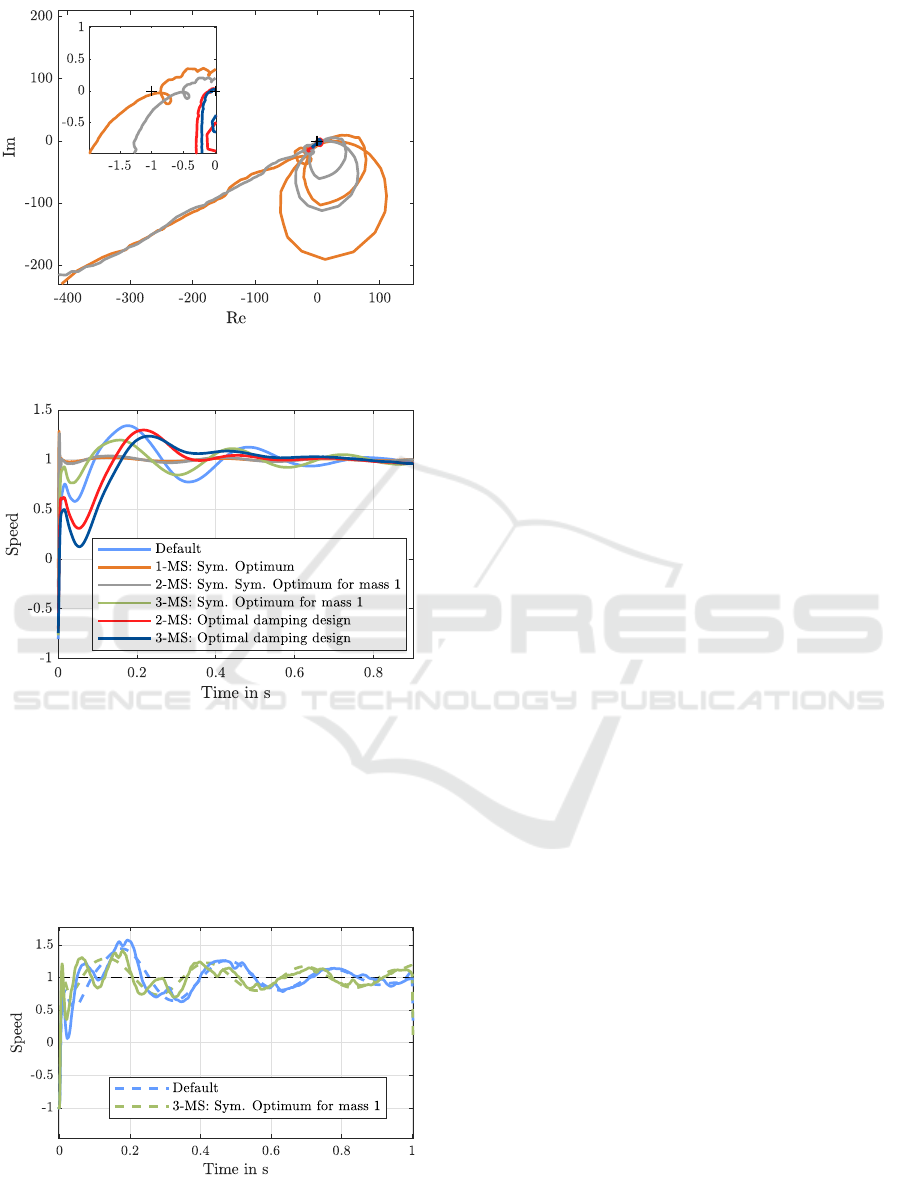
Figure 10: Nyquist plot for the considered set of model-
based controllers, stacker crane.
Figure 11: Calculated step responses for different model-
based controllers, stacker crane.
good agreement, except for additional scattering in
the measurement which is assumed to be caused by
backlash. So, although nonlinearity has a significant
influence on the step response, the linear method does
not fail. Merely the nonlinear artefacts are not pre-
dicted correctly.
Figure 12: Calculated (continuous) vs. measured and scaled
(dashed) step responses for two controller settings, stacker
crane.
5 DISCUSSION
This paper is intended to give a possible answer to
the often asked question: Given a frequency-domain
measurement of a system and several candidate mod-
els obtained from parameter identification, which
model is the one to choose for control design? The
proposed decision making comes at little expense as
only one more experiment is required rather than sev-
eral experiments (one for each controller-model com-
bination). The reason why this second experiment is
necessary at all is twofold: Firstly, a higher accuracy
of the verification with calculated step responses can
be achieved by the special experiment in closed loop,
as explained in Sec. 3.3, which is also expectable from
the cited literature about identification for control.
This theory says that a model should always be mea-
sured in a way that is close to its intended purpose.
Secondly, model selection requires a separation into
training and validation dataset. The second experi-
ment constitutes the validation dataset and is therefore
indispensable for a precise and unbiased performance
scoring. A third dataset (test data) comprises of the
measured step responses, which are not really part of
the model selection method but serve as a validation
of the method as a whole.
The results of the preceding section have demon-
strated a fairly good accuracy of the step response
calculation in spite of parasitic nonlinearities for two
testbeds. These nonlinearities result from the fact that
no ideal mass-spring-damper systems where tested
but realsitic, application-oriented setups with indus-
trial hardware. This is especially true for the stacker
crane.
Model selection was carried out successfully, al-
though the simple PI control cannot fully utilize the
relatively complex models. This is evident from the
fact that all the step responses look relatively simi-
lar. In both examples the exact model is not as critical
as one might expect from Fig. 7, where the models
have a clearly different fit. The method cannot eas-
ily be extended to other controller transfer functions,
possibly with higher order. For example, PID con-
trol cannot readily be incorporated because the suit-
ability of the derivative feedback depends also on the
sensors’ signal quality, which cannot be taken into
account easily. This is unfortunate because some-
times PID control can be an advantage over PI con-
trol (Zhang and Furusho, 2000). It could be investi-
gated in future works if methods with more explicit
model-dependency like flatness-based control of 2/3-
mass systems (Tkany et al., 2020) show a more sig-
nificant difference between the models.
It should be highlighted that this model selection
Control-relevant Model Selection for Multiple-mass Systems
613

method is very close to existing approaches, where
several physically motivated models are identified
without any considerations about control-relevant ex-
citation or control-relevant cost functions and then a
commissioning engineer has to decide which model
is most suitable. However, better results could possi-
bly be obtained if the parameter identification of the
candidate models was already carried out with spe-
cial control-relevant cost functions, see for example
(Codrons, 2005), not only the model selection. It can
be seen in Fig. 7 that the parameter identification, as
carried out in this paper, leads to bias errors in am-
plitude at high frequencies, where the phase is around
−180
◦
in Fig. 8. As a consequence of the inaccuracy
some of the designed controllers are rendered inap-
propriate although they could possibly work well with
a more accurate model. It is possible that a more spe-
cialized identification criterion could avoid this bias
and instead introduce bias at less important frequen-
cies. Considering control-relevant identification cri-
teria could be future work.
Another problem is that the best controller for a
certain model may not have been tested, because only
a limited number of controllers is considered. Also,
the parametrization of hyperparameters is sometimes
arbitrary, for example the damping ratio. The possi-
bility exists that for a different damping ratio a better
performance could have been obtained. On the other
hand, a completely manual model selection procedure
would probably be suboptimal in the same way and
the given procedure is still more systematic.
6 CONCLUSION
In the paper at hand a procedure was proposed to
leverage state-of-the-art model-based controllers to
realize a control-oriented model selection of first prin-
ciple models for electric drives with imperfect me-
chanics. The goal is to select the model that leads to
optimal performance of a model-based controller, not
the most accurate model. A clear focus was laid on
model selection rather than parameter identification.
The model selection is based on open-loop frequency
response functions and step responses for verification
of the different model-controller combinations.
In experiments on two industrial testbeds it was
shown that the step responses calculated with the
nonparametric model predict the general shape accu-
rately, while deviations still exist due to nonlinearities
and disturbances in the real system that are arguably
not related to the settling motion. A clear improve-
ment of the controller’s performance over the default
settings was achieved for one of the two testbeds.
Limitations are the inability to consider sensor noise
explicitly and the not control-optimal bias error in
the parameter identification. The experiments have
shown that the best model is not always the most ac-
curate model, as expected. But it was found that often
there is no sharp optimum and several models are al-
most equally good.
ACKNOWLEDGEMENTS
This work was sponsored by the German Forschungs-
vereinigung Antriebstechnik e.V. (FVA).
REFERENCES
Abate, J. and Whitt, W. (2006). A unified framework for
numerically inverting laplace transforms. INFORMS
Journal on Computing, 18(4):408–421.
Aguilar, J., Cerrada, M., and Cordero, A. T. F. (2001). Ge-
netic programming-based approach for system identi-
fication. Advances in Fuzzy Systems and Evolutionary
Computation, Artificial Intelligence, pages 329–334.
Brun, R., Reichert, P., and K
¨
unsch, H. R. (2001). Practical
identifiability analysis of large environmental simula-
tion models. Water Resources Research, 37(4):1015–
1030.
Chatfield, C. (1995). Model uncertainty, data mining and
statistical inference. Journal of the Royal Statistical
Society: Series A, 158(3):419–444.
Codrons, B. (2005). Process modelling for control: a uni-
fied framework using standard black-box techniques.
Springer Science & Business Media.
Date, P. and Vinnicombe, G. (2004). Algorithms for worst
case identification in H
∞
and in the ν-gap metric. Au-
tomatica, 40(6):995–1002.
Doetsch, G. (1985). Anleitung zum praktischen Ge-
brauch der Laplace-Transformation und der Z-
Transformation. R. Oldenbourg Verlag M
¨
unchen,
fifth edition.
Geng, L.-H., Cui, S.-G., Zhao, L., and Lin, H.-Q. (2015). A
convex optimization algorithm for frequency-domain
identification in the v-gap metric. International
Journal of Adaptive Control and Signal Processing,
29:362–371.
Gevers, M. (2004). Identification for control: Achievements
and open problems. IFAC Proceedings, 37(9):401–
412.
Gevers, M. and Ljung, L. (1986). Optimal experiment de-
signs with respect to the intended model application.
Automatica, 22(5):543–554.
G
´
omez, P., Arellano, P., and Mota, R. O. (2007). Fre-
quency domain transient analysis applied to transmis-
sion system restoration studies. In Proc. of the 7th In-
ternacional Conference of Power Systems Transients
(IPST’07).
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
614

Grassmann, W. K. (2013). Computational probability, vol-
ume 24. Springer Science & Business Media.
Hjalmarsson, H., Gevers, M., and De Bruyne, F. (1996).
For model-based control design, closed-loop iden-
tification gives better performance. Automatica,
32(12):1659–1673.
Hosono, T. (1981). Numerical inversion of laplace trans-
form and some applications to wave optics. Radio
Science, 16(6):1015–1019.
Jansson, H. (2004). Experiment design with applications in
identification for control. PhD thesis, Royal Institute
of Technology (KTH), Stockholm, Sweden.
Khan, M. B., Munawar, K., and Nisar, H. (2013). Switched
hybrid position control of elastic systems with back-
lash. In 2013 IEEE International Conference on Con-
trol System, Computing and Engineering, pages 551–
556. IEEE.
Manabe, S. a. (1998). Coefficient diagram method. IFAC
Proceedings Volumes, 31(21):211–222.
Oomen, T., van Herpen, R., Quist, S., van de Wal,
M., Bosgra, O., and Steinbuch, M. (2013). Con-
necting system identification and robust control for
next-generation motion control of a wafer stage.
IEEE Transactions on Control Systems Technology,
22(1):102–118.
Risuleo, R. S. (2016). System identification with input un-
certainties: an EM kernel-based approach. PhD the-
sis, KTH Royal Institute of Technology.
Riva, M. H., Dagen, M., and Ortmaier, T. (2016). Adap-
tive unscented kalman filter for online state, parame-
ter, and process covariance estimation. In American
Control Conference (ACC), pages 4513–4519. IEEE.
Saha, P., Egerstedt, M., and Mukhopadhyay, S. (2021).
Neural identification for control. IEEE Robotics and
Automation Letters, 6(3):4648–4655.
Schr
¨
oder, D. (2015). Elektrische Antriebe-Regelung von
Antriebssystemen. Springer Vieweg, Berlin, Germany,
fourth edition.
Sch
¨
utte, F. (2003). Automatisierte Reglerinbetriebnahme
f
¨
ur elektrische Antriebe mit schwingungsf
¨
ahiger
Mechanik. Shaker.
Sch
¨
utte, F., Beineke, S., Grotstollen, H., Fr
¨
ohleke, N.,
Witkowski, U., R
¨
uckert, U., and R
¨
uping, S. (1997).
Structure-and parameter identification for a two-mass-
system with backlash and friction using a self-
organizing map. In European Conference on Power
Electronics and Applications, volume 3, pages 3–358.
Sysel, P. and Rajmic, P. (2012). Goertzel algorithm gen-
eralized to non-integer multiples of fundamental fre-
quency. Journal on Advances in Signal Processing
(EURASIP), 2012(1):1–8.
Tacx, P., de Rozario, R., and Oomen, T. (2021). Model order
selection in robust-control-relevant system identifica-
tion. In 19th IFAC Symposium on System Identifica-
tion, volume 54, pages 1–6. Elsevier.
Tan, N., Atherton, D. P., and Y
¨
uce, A. (2017). Computing
step and impulse responses of closed loop fractional
order time delay control systems using frequency re-
sponse data. International Journal of Dynamics and
Control, 5(1):30–39.
Tantau, M., Jonsky, T., Ziaukas, Z., and Jacob, H.-G.
(2022). Control-relevant model selection for servo
control systems. In International Conference on Con-
trol, Decision and Information Technologies, pages 1–
8, Istanbul, Turkey. IEEE. accepted.
Tantau, M., Popp, E., Perner, L., Wielitzka, M., and Ort-
maier, T. (2020). Model selection ensuring practi-
cal identifiability for models of electric drives with
coupled mechanics. In 21st International Federation
of Automatic Control (IFAC) World Congress, Berlin,
Germany.
Tkany, C., Grotjahn, M., and K
¨
uhn, J. (2020). Flatness-
based feedforward control of a stacker crane with
online trajectory generation. In 2020 4th Interna-
tional Conference on Automation, Control and Robots
(ICACR), pages 79–87. IEEE.
Toscano, R. and Lyonnet, P. (2009). Robust pid controller
tuning based on the heuristic kalman algorithm. Auto-
matica, 45(9):2099–2106.
Tripathi, S. M., Tiwari, A. N., and Singh, D. (2015). Op-
timum design of proportional-integral controllers in
grid-integrated pmsg-based wind energy conversion
system. International Transactions on Electrical En-
ergy Systems, 26(5):1006–1031.
Van den Hof, P. (1997). Closed-loop issues in system iden-
tification. IFAC Proceedings, 30(11):1547–1560.
Van Den Hof, P. M. J. and Schrama, R. J. P. (1994). Identifi-
cation and control-closed loop issues. IFAC Proceed-
ings, 27(8):311–323.
van Herpen, R., Oomen, T., and Bosgra, O. (2011). A
robust-control-relevant perspective on model order se-
lection. In Proceedings of the American Control Con-
ference, pages 1224–1229. IEEE.
van Herpen, R., Oomen, T., van de Wal, M., and Bosgra,
O. (2010). Experimental evaluation of robust-control-
relevance: A confrontation with a next-generation
wafer stage. In Proceedings of the American Control
Conference, pages 3493–3499. IEEE.
Vinnicombe, G. (2001). On closed-loop identification: er-
ror distributions in the ν-gap metric. In 40th IEEE
Conference on Decision and Control, volume 4, pages
3099–3103. IEEE.
Wertz, H. and Schutte, F. (2000). Self-tuning speed con-
trol for servo drives with imperfect mechanical load.
In IEEE Industry Applications Conference, volume 3,
pages 1497–1504. IEEE.
Witczak, M., Obuchowicz, A., and Korbicz, J. (2002). Ge-
netic programming based approaches to identification
and fault diagnosis of non-linear dynamic systems. In-
ternational Journal of Control, 75(13):1012–1031.
Yang, Z., Geng, L., and Yang, Y. (2018). A computation-
ally efficient eiv models identification method using
the v-gap metric. In 37th Chinese Control Conference
(CCC), pages 1729–1734. IEEE.
Zhang, G. and Furusho, J. (2000). Speed control of two-
inertia system by pi/pid control. IEEE Transactions
on industrial electronics, 47(3):603–609.
Control-relevant Model Selection for Multiple-mass Systems
615
