
Highly Automated Corner Cases Extraction: Using Gradient Boost
Quantile Regression for AI Quality Assurance
Niels Heller and Namrata Gurung
QualityMinds GmbH, N
¨
urnberg, Germany
Keywords:
Artificial Intelligence, Quality Assurance, AI Quality, Data Quality, Corner Cases, Autonomous Driving.
Abstract:
This work introduces a method for Quality Assurance of Artificial Intelligence (AI) Systems, which identifies
and characterizes “corner cases”. Here, corner cases are intuitively defined as “inputs yielding an unexpectedly
bad AI performance”. While relying on automated methods for corner case selection, the method relies also
on human work. Specifically, the method structures the work of data scientists in an iterative process which
formalizes the expectations towards an AI under test. The method is applied in a use case in Autonomous
Driving, and validation experiments, which point at a general effectiveness of the method, are reported on.
Besides allowing insights on the AI under test, the method seems to be particularly suited to structure a
constructive critique of the quality of a test dataset. As this work reports on a first application of the method,
a special focus lies on limitations and possible extensions of the method.
1 INTRODUCTION
Artificial Intelligence (AI) applications, especially
applications of deep neural networks, have found a
variety of application domains in the recent years. Of
special concern are safety relevant AI applications,
where automatically taken decisions may cause dam-
age in case of failure, or prevent that damage in case
of success. Most prominent examples of such do-
mains are Autonomous Driving and medical applica-
tions. Especially in these domains calls for quality
assurance measures for AI applications were recently
expressed (Tian et al., 2018; Hamada et al., 2020;
Challen et al., 2019).
Obviously, arguments for the safety of an AI ap-
plication must involve more than simply reporting
performance readings on a test dataset. A prominent
incident which illustrates the dangers of malfunction-
ing AIs in Autonomous Driving happened in 2016,
when an AI misclassified a truck as an underpass
which caused an accident (referenced for instance in
(Tian et al., 2018)). Nobody wants to be surprised by
such an error of an AI that is already in use. More
specifically, a safety argumentation for an AI needs to
encompass a consideration of what is difficult for the
AI and why this does or does not impede its use.
Several examples of such “difficult inputs” are
canon for specific fields of application: Image recog-
nition for Autonomous Driving is often concerned
with AI brittleness and adversarial attacks (Tian et al.,
2018; Huang et al., 2017), while medical applica-
tions often struggle with unbiased training datasets
(Challen et al., 2019) and domain gaps (Reinke et al.,
2021) where inputs from different data sources cause
erroneous behaviours. The automated search for
such difficult inputs is addressed in the literature:
Hendrycks et al. impressively demonstrated that a
dataset containing “naturally occuring” adversarial
examples can be curated from a dataset for a vari-
ety of computer vision AIs (Hendrycks et al., 2021),
other approaches use heuristic methods for specific
AIs (Kwiatkowska, 2019).
Such difficult inputs are sometimes referred to as
“corner cases” (albeit the term “corner case” being
subject to conflicting definitions which are discussed
in Section 2). Arguably, the identification and char-
acterization of such corner cases plays a major role
for AI quality assurance. The authors propose the fol-
lowing intuition for corner cases: Before evaluation,
it cannot be known what poses a problem for a trained
AI. Yet, while there are “intuitive” inhibitors, which
are more or less aligned with what humans perform-
ing the same task might find difficult, there are also
“non-intuitive” ones which are specific to the AI sys-
tem under test. For instance, an image classification
AI might be distracted by dark or low contrasted im-
ages just as a human might be (which is an intuitive
inhibitor), but it might also react heavily to adversar-
62
Heller, N. and Gurung, N.
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance.
DOI: 10.5220/0011152200003269
In Proceedings of the 11th International Conference on Data Science, Technology and Applications (DATA 2022), pages 62-73
ISBN: 978-989-758-583-8; ISSN: 2184-285X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ial attacks or uncommon surface structures. Cases
of non-intuitive inhibitions can be considered corner
cases (because no one thought of them before) and
it is in the best interest of an AI vendor to know as
many non-intuitive inhibitors as possible before tak-
ing an AI into production.
Painted with a broad brush we can define a corner
case as an input yielding an “unexpectedly poor AI
performance”. Finding a new performance inhibitor
means updating one’s expectation towards an AI, and
this can yield corner cases: Bad performances which
are not explained by the current expectation. Such
inhibitors may be not initially recognizable in a test
dataset, and might require extensive feature engineer-
ing in order to be defined. For instance, image recog-
nition AIs may be disturbed by subtle texture patterns,
but rarely does a dataset contain the respective labels.
It is hence the work of a data scientist in the role of
a “feature engineer” to find, model, and test possible
performance-inhibiting features.
Feature engineering typically aims at improving
AI-performances by providing a model with features
it cannot infer on its own (Heaton, 2016). This is
explicitly not the aim of the approach introduced in
this report. Instead, we aim at guiding a feature en-
gineering and testing process which, as a final out-
come, produces formal performance expectations to-
wards an AI and corner cases (i.e. inputs which fall
below these expectations). In that, the following work
pertains not only to the field of AI quality, but also to
dataset quality. Further it aims at producing a human-
understandable descriptions of what the AI under test
struggles with.
Contribution. This work introduces a method for
analysing AI-models aiming at the detection and ex-
traction of corner cases from a test dataset. The appli-
cation of this method is highly (but not completely)
autonomous and relies on human work in the form of
feature engineering.
This report is structured as follows: Section 2 dis-
cusses related work, Section 3 describes the proposed
method in detail, Section 4 illustrates the results of
applying the method in a concrete use case in Au-
tonomous Driving, and these results are discussed in
Section 5. Section 6 concludes this report.
2 RELATED WORK
Corner Cases. Ensuring the robustness and pre-
dictable performance of an AI, even when faced with
rare, unexpected, situations is an important concern
especially in Autonomous Driving. A broad defini-
tion of corner case in Autonomous Driving can be
found in (Bolte et al., 2019) “A corner case is given,
if there is a non-predictable relevant object/class in
relevant location”. There are several methods devel-
oped for automatic corner case detection, especially
for Deep Neural Networks (DNNs), which will be
elaborated on below.
One approach to detect corner cases is based on
transforming the input data. When a transformed in-
put results in a different class label prediction of a
DNN, the input is considered a corner case. Glob-
ally effective transformations such as changes in con-
trast, brightness and saturation are presented in (Hos-
seini and Poovendran, 2018). Additionally, locally
restricted interventions, such as blur or the insertion
of lens flares representing sensor damage can be also
be used to detect corner cases (Secci and Ceccarelli,
2020).
Apart from transformation of inputs, metamorphic
relations (Xie et al., 2011) such as effect of an input
on steering angle output is described in the DeepTest
framework (Tian et al., 2018). For example, a slight
change in contrast of an input frame should not affect
the steering angle of a car (while Tian et al. report
on such cases). Thus, input-output pairs that violate
those metamorphic relations can be considered corner
cases.
Further, a white-box testing framework, DeepX-
plore (Pei et al., 2017) presents a method to solve
the joint optimization problem that maximizes both
differential behaviors and neuron coverage of DNNs
by using gradient ascent to find corner cases. Start-
ing from a seed input, DeepXplore performs a guided
search following the gradient in the input space of
two similar DNNs supposed to perform the same task
such that it finally uncovers the test inputs that lie be-
tween the decision boundaries of these DNNs. Such
test inputs that are classified differently by the two
DNNs are then labelled as corner cases. Additionally,
custom domain specific constraints can also be prede-
fined in DeepXplore.
Corner cases can also arise depending on scene
constellations. In particular, with increasing degree
of occlusion of relevant objects such as pedestrians, it
can become increasingly difficult for the DNN to rec-
ognize relevant objects. Wu et al. present a method
to overcome this by combining occlusion modelling
with multiple view representation in a complex dy-
namic Bayesian network (Wu et al., 2003). Isele et
al. look at occlusions occurring at lane intersections
and its effect on autonomous vehicles’ navigation us-
ing deep reinforcement learning (Isele et al., 2018).
By synthetically generating such occluded data, cor-
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance
63

ner case scenarios can be identified.
Another method to detect corner cases presented
by Hanhirova et al. is based on using a simulated
environment using the CARLA software (Dosovit-
skiy et al., 2017), which was connected to a Machine
Learning framework. Herein, a client drives a vehi-
cle with AI-subsystem within a simulated environ-
ment. The vehicle-state information about the sim-
ulated world (ground truth) and the perception of the
AI agent within the same-defined simulated condition
are recorded and compared. The scenarios that yield
in conflicting states are marked as corner cases (Han-
hirova et al., 2020).
Bolte et al. present a framework for a detection
system that is based on the ability of DNNs to predict
the next frame when given a certain sequence of input
frames. The difference between the actual frame and
the predicted frame gives a corner case score (Bolte
et al., 2019). Through this method it is possible to
identify scenarios which could lead to high corner
case probability.
As mentioned, there are several ways of automati-
cally generating and detecting corner cases. However,
depending on the operational domain, the variability
of possible inputs can be very large. Also, certain
types of corner cases can be specific to the type of
DNN used. For the work in this report, an AI model
trained on synthetically generated dataset is used. For
testing, DeepLabV3+ (Chen et al., 2018) with pre-
trained weights on a test dataset was used. Corner
cases arising due quantitative, perceptual and situa-
tional inhibitors in the test dataset will be discussed
in the next sections. Further, ability of augmented im-
ages to produce corner cases will also be explored.
Anomaly Detection. Anomalies (also referred to as
outliers) can be defined as “observations which de-
viate so much from other observations as to arouse
suspicions that it was generated by a different mech-
anism” (Hawkins, 1980). Note that this definition
relates well to the introductory definition of cor-
ner cases as “unexpectedly bad performances” as it
stresses the surprise an expert might experience to-
wards an observation. The detection of such anoma-
lies is a very important, and extensively studied, as-
pect of statistical analysis, which has found numerous
application domains (Chandola et al., 2009; Hawkins,
1980). While the abstract method proposed in Section
3 does not specify how “expectations towards an AI”
are to be formulated, the concrete application of that
method reported in Section 4 relies heavily anomaly
detection in the statistical sense.
An extensive literature review on anomaly detec-
tion can be found in (Chandola et al., 2009), which
provides a well-structured classification framework
for different approaches. According to that frame-
work, the approach used in Section 4 uses unsuper-
vised anomaly detection (without a training set of ex-
amples of anomalies) and finds contextual anomalies
(values are only anomalies because their divergence
from their context). Specifically, the method could
be seen as “regression model based” where a regres-
sion model is fitted to define the contextual normal-
ity of a value, and residuals from that normality are
interpreted as their anomaly score (Chandola et al.,
2009). The regression models used in Section 4 are
Quantile Regression models, which try to predict val-
ues splitting all values according to a fixed ratio (for
instance, fitting a curve such that 10% of the obser-
vations lie below a curve). A pleasant introduction
to this technique and some applications can be found
in (Waldmann, 2018). Unsurprisingly, Quantile Re-
gression has found applications in anomaly detection
such as finding anomalies in health insurance claims
(Nortey et al., 2021) and mechanical fault detection
(Xu et al., 2019).
As mentioned in the introduction, the method in-
troduced in this report relies on human work, which
is not uncommon for anomaly detection approaches.
Several approaches, for instance, incorporate human
judgement on automatically selected examples to im-
prove (Chai et al., 2020; Islam et al., 2018) or even to
choose (Freeman and Beaver, 2019) anomaly detec-
tion mechanisms.
AI Quality Assurance and AI Safety. The process
of quality assurance for AI directly translates from
Quality Assurance (QA) processes used in software
development. Poth et al. focus in (Poth et al., 2020) on
a systematic methodical approach (the evAIa method:
evaluate AI approaches) that evaluate risks of the ma-
chine learning model using a questionnaire specifi-
cally for AI products and services and outputs rele-
vant QA recommendations. Lenarduzzi et al. focus
their consideration on AI Software Development i.e.
the software-driven definition, training, testing, and
deployment of AI systems (Lenarduzzi et al., 2021).
Hamada et al. provide general guidelines for AI QA
for different application domains, one of which being
Autonomous Driving (Hamada et al., 2020). Similar
to the method proposed in this report, the method pro-
posed by Hamada et al. “helps to create test cases”,
which, in their description, appear similar to exam-
ples shown in Section 4.
Besides general guidelines for AI QA, the notion
of “AI robustness” is of special interest in the Au-
tonomous Driving domain. Several approaches as-
sess the robustness of the DNNs to adversarial per-
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
64
turbations (Kwiatkowska, 2019) exist. One of the ap-
proaches is heuristic search for adversarial examples,
which is done by searching for images created by
changing the important pixels of an image in the clas-
sification decision (Wicker et al., 2018). Another ap-
proach is based on automated verification approaches
which aim to provide formal guarantees on the ro-
bustness of DNNs (Tjeng et al., 2017). Herein, the
maximal safe radius is defined as the maximum size
of the perturbation that will not cause a misclassifi-
cation. With this approach, one can encode the set
of necessary constraints for AI safety. Lastly, since
neural networks are based on probabilistic interpre-
tation, this leads to defining probabilistic guarantees
on their robustness and is presented in (Cardelli et al.,
2019) wherein Bayesian neural networks (BNNs) can
capture the uncertainty within the learning model.
Thus, probabilistic verification for DNNs is another
approach to ensure AI safety.
Note that the method introduced in this report po-
sitions itself somewhat in between existing AI QA
approaches: It is more specific than general guide-
lines on AI Software and dataset quality, while also
being more general than analyses of specific Machine
Learning models (such as DNNs).
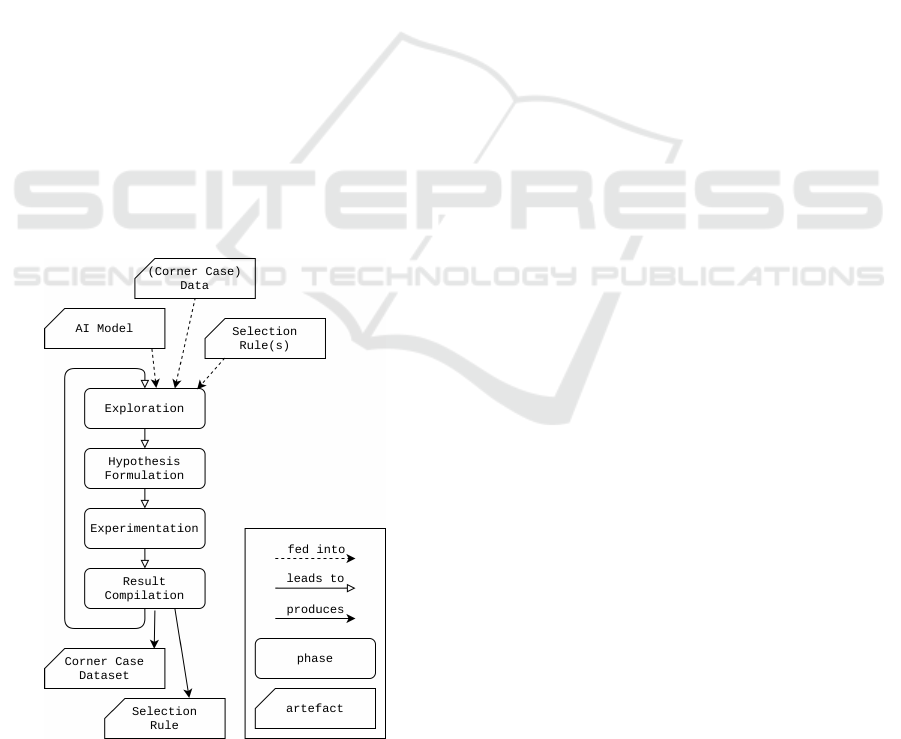
3 METHOD
Figure 1: The phase iteration model.
In the following, a structured approach to be carried
out by data scientists (or teams of data scientists) is
described. It aims at operationalizing the loose intu-
ition of a corner case as a “performance below expec-
tation” in so-called selection rules which encompass
the decision whether an input is below of what was
“expected”.
The proposed method consists of four phases
which are carried out in iterations. Each iteration re-
ceives the AI-model to be examined, a (sufficiently
large) test dataset, and a set of selection rules as input.
Then, an additional selection rule and a corner case
dataset are produced, where the corner case dataset is
a subset of the input test dataset. The next iteration
then receives the output of the current iteration as in-
put and so forth. Obviously, the test dataset should
not be used for training of the AI as this might lead to
over-fitted selection rules.
Formally, a selection rule S is a binary func-
tion which maps an input i to a decision: S : i 7→
{true, false}. Selection rules rely on an “expectation
of performance” as well as the actual performance
recorded for the input. Performance expectations can
be expressed as simple value cut-offs such as “this
natural language processor cannot comprehend sen-
tences longer than n items” or as general functional
relationships such as “an image with brightness x
should at least yield an AI performance of f (x)”. The
performance expectations defined Section 4 are ex-
pressed as Gradient Boost Quantile Regression mod-
els. For the image brightness example, input images
are chosen for which the performance is below the
10th percentile for its brightness.
The corner case dataset is produced by applying
all current selection rules to the test dataset and fil-
tering for observations which are selected by all cur-
rent rules. The iteration is stopped when one does not
find a new rule which provides more insights into the
performance inhibitors of the AI. While this stopping
criterion seems quite imprecise, its concrete imple-
mentation depends on the use case (the AI under test,
the test dataset, etc.). In Section 4, the stopping point
is chosen by quantifying how much new information
a new selection rule provides.
Note that the approach as a whole follows a simple
intuition data scientists might have when looking for
performance inhibitors: If a large portion of the input
data consists of images which are to dark for the AI to
cope with, it might be wise to “filter out these cases”,
in order to focus any further analyses: Other effects
might have smaller influences while still being of im-
portance. This explicitly does not mean that the per-
formance inhibitor “darkness” is not important for a
safety argumentation, rather that a dark image is not a
corner case (because bad performance was expected).
The main “human” work the data scientists carry
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance
65

out in this approach can be seen as feature engi-
neering, defined as “the act extracting features from
raw data and transforming them into formats suitable
for the machine learning model” (Zheng and Casari,
2018). While, as mentioned above, the purpose of this
process is to find human-understandable descriptions
of performance inhibitors, not necessarily to fuel bet-
ter ML-models.
Phases. The phases in the method are inspired by
what is colloquially known as “the scientific method”
(an extensive summary on the term and applications
are provide e.g. in (Gauch Jr et al., 2003)) which typ-
ically consists in making an observation, formulating
a hypothesis on the explanation of the phenomenon,
and conducting experiments testing the hypothesis.
The observations in this case are behaviours or de-
cisions made by an AI and their comparison against
what the AI was expected to provide.
In the Exploration phase, the data scientists ex-
plore the dataset using the methods typical for their
domain, such as plotting data, and evaluating specific
observations which yielded a bad AI-performance. In
the Hypothesis Formulation phase, a concrete perfor-
mance inhibitor is hypothesised (sentence length, im-
age brightness, ...), and measurements of these fea-
tures are implemented. Note that there might com-
peting measures of the same inhibitor: While deter-
mining the length of a sentence might be straight for-
ward, there are numerous ways of measuring the (per-
ceived) brightness of an image. The experimentation
phase aims at choosing a concrete inhibitor feature
and evaluating whether this feature is both new (i.e.
it is not already modelled by previous inhibitors) and
important (i.e. it actually has an influence on perfor-
mance). When the experimentation phase fails for in-
stance due to the inhibitor not being significant, the
process is reset to the experimentation phase. Finally,
the Result Compilation phase consists in applying the
newly found selection rule along with all old rules to
produce a new corner case dataset.
Considerations. Arguably, applying the method to
a concrete AI and a test dataset requires making nu-
merous decisions. How is novelty and importance
of an inhibitor determined? For quantile regression
models, suitable quantile thresholds must be chosen.
Also, there are often a number of AI-performance
metrics to choose from. All these considerations de-
pend heavily on the AI under test and the available test
dataset. In Section 4, the method is applied to a use
case from Autonomous Driving, and the rationales for
the regarding choices were are presented there.
The data scientists play a major role in the process,
which would not motivate the method’s name “Highly
Autonomous Corner Case Extraction”. Yet, the pro-
cess of applying new selection rules, testing their nov-
elty and importance can be automated. Also, it can be
expected that selection rules found with this method
require more and more intricate feature engineering
the later they are found. Indeed, in the application
presented in Section 4, the first rules relied on features
already present in the dataset and the regarding selec-
tion rules could have been applied completely auto-
matically. In this way, the goal of the method is to
provide the data scientist with the problems which re-
quire human intervention as fast as possible.
It has to be noted that, by applying the method,
one may find not only performance inhibitors and re-
garding corner cases, but also bugs in the data, and
one may learn about the shortcomings of the applied
performance metric. In the greater context of AI-
quality assurance, all of this is valuable information,
and a discussion of how such secondary findings can
be used, are given in Section 5. Extending on this
thought, an aspect crucial for the successful applica-
tion of this method, which will remain untouched in
this report, is the provision of adequate tooling espe-
cially when large datasets are evaluated.
4 APPLICATION RESULTS
The method described in the previous section was ap-
plied to an autonomous driving scenario: The AI un-
der test performs semantic group segmentation (La-
teef and Ruichek, 2019) of traffic images taken from
a vehicle camera. The AI performs a perceptual
interpretation of the scenario recorded by the cam-
era: Identifying cars, roads, street signs, pedestri-
ans, and so forth. Obviously, such an AI is safety-
critical as failing to detect vulnerable road users, for
instance, can easily lead to serious accidents. There-
fore the evaluation presented in the following focuses
on pedestrian detection specifically.
The AI under test is a DeepLabV3+ model (Chen
et al., 2018) with a ResNet (He et al., 2016) backbone
(here, the backbone of a model is a feature extracting
neural network within the larger DeepLabV3+ archi-
tecture). It was trained with a batch size of 6 over 50
epochs on a synthetically generated dataset contain-
ing 21884 frames of inner-city traffic scenarios. Each
frame was rendered in an 1920 by 1280 pixel image.
An additional set of 5173 frames were used for vali-
dation during training, and an additional set of 9897
frames were held back for testing. These test frames
were used to carry out the method.
The test frames contained in total 206767 pedes-
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
66

trians, which are denoted as instances in the follow-
ing. This number of instances (in average 20.9 per
frame) is obviously very high for “real world” traf-
fic scenarios. Yet, the test dataset was specifically
produced to test pedestrian detection performances,
and the synthetic nature of the production lead to a
very generous ground truth data which contained in-
stances which were barely visible. This made two fil-
ter steps necessary: Firstly, all instances which were
to far from the camera to be safety relevant were
dropped from the dataset. Secondly, data bugs (mis-
labeled data, instances being completely occluded be-
hind walls etc.) were removed. In a way this second
filter step already constituted the application of a se-
lection rule as described by the method. One does not
expect any performance (of this model) for instances
that are not visible.
1
After these primary filter steps,
a set of 58809 instances were left for the method ap-
plication.
The AI performance was measured using the Jac-
card Index (also known as “Intersection over Union”
or simply IoU in the following) of the ground truth
segmentation, which contained a pixel-exact labelling
of all instances, and the inferred segmentation by the
AI.
Figure 2 shows two frame sections containing in-
stances which were not sufficiently detected by the AI
(both yielding an IoU of 0.084). Yet, while the rea-
son for this bad recognition of the left instance seems
to be obvious (the image being quite dark and low
contrasted), such simple reasons can not be found for
the instance on the right: Is it the person’s clothing?
The contrast to their background being to high? Their
posture? The method proposed in this report tries to
find such surprising instances as the one on the right,
which was indeed a selected corner case, while disre-
garding instances as given on the left.
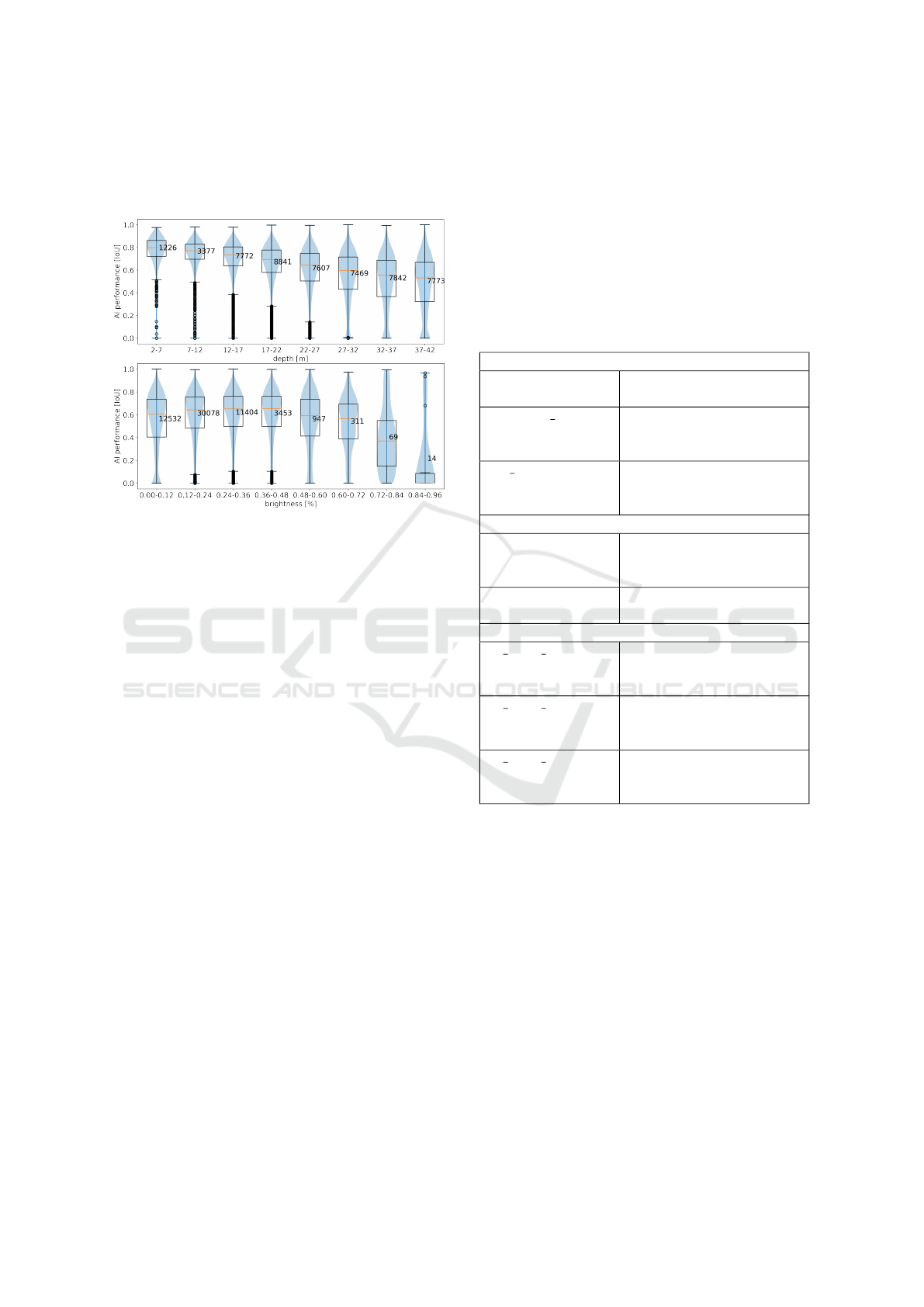
Performance Inhibitors and Selection Rules. Af-
ter applying the method described in Section 3, a to-
tal of 8 selection rules were found, which were each
based on a distinct performance-inhibiting feature. As
mentioned in Section 3, including a new rule requires
the assurance of its importance and novelty. To as-
sure an inhibitor’s importance (i.e. an influence on
AI-performance), common statistical measures where
used: Producing and evaluating scatter, box, and vio-
lin plots as well as relying on linear or polynomial re-
gression and associated fitness values. Figure 3 shows
two examples of such inhibitors: depth (the distance
of an instance to the camera) and brightness (mea-
sured by evaluating the colours proximate to the in-
1
Note that an AI capable of object permanence might
be able infer the existence of invisible instances
Figure 2: Sections of two frames with poorly detected in-
stances. Left: Low brightness (not selected as corner case),
right: selected corner case.
stance). While the influence of depth on performance
seems to be linear, the influence of brightness on per-
formance is more intricate as the evaluated AI seems
to prefer a “sweet spot” of brightness values where it
performs best.
The plots also elicit the intuition of the approach:
Outliers (instances below the 10th percentile within
their bin) are instances which are for example “well
lit” or “close enough” while still being poorly de-
tected. Hence, by relying on quantile regression mod-
els, which can be trained to predict for instance the
10th performance percentile for a given an input fea-
ture, a performance-inhibiting feature can be associ-
ated with a selection rule. Given a feature F, mod-
elled by the quantile regression model M
F
the associ-
ated selection rule is given by
S
F
: i 7→ M
F
(i) < per f ormance(i)
A combined selection rule S
F
1
,...F
n
is defined as the
selection rule which chooses instances chosen by all
S
F
1
, .. . S
F
n
.
To judge the novelty of a selection rule S
F
, the
information content of the rule I(S
F
) can be defined
as the negative logarithm of the probability of the rule
choosing an instance.
I(S
F
) := −log
2
(p(S
F
= True))
Note that the information content of a selection rule
is simply the “self-information value” (used in infor-
mation theory (Jones, 1979)) of a possitive selection.
Self-information is often described to measure the
“surprisal” of a (rare) event, which fits the intuition
of corner cases as “unexpectedly bad performances”.
The information gain of a new selection rule
S
F
n
with respect to a set of existing selection rules
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance
67
S
F
1
,...,F
n−1
can then simply be defined as this differ-
ence
I(S
F
1
,...,F
n
) − I(S
F
1
,...,F
n−1
)
Figure 3: Violin plots with overlaid box plots of the perfor-
mance inhibitors “brightness” and “depth”. The data was
sorted into bins of equal size in the inhibitor domain.
The performance inhibitors found while carrying
out the method were classified in 4 categories: Data
bugs, quantitative inhibitors, perceptual inhibitors,
and situational inhibitors. As mentioned above, data
bugs were caused in the data production, and encom-
passed mislabeled instances, completely invisible in-
stances, instances with bounding box of width 0, etc.
As this category is a bit apart from the others, it is
only mentioned but not further discussed.
Quantitative inhibitors are features relating to “the
amount of information” available for inference, such
as the distance of the instance to the car (far-away
instances are smaller), or simply the number of vis-
ible instance pixels. Perceptual inhibitors are features
which are encoded by parameters known in image
processing such as an instances brightness or its con-
trast to the background. Finally, situational inhibitors
describe an instance’s surrounding, such as whether
and how much an instance is occluded by other in-
stances, or whether there is vegetation in its back-
ground.
Note that quantitative inhibitors were readily
available in the dataset, while all other features re-
quired (in part substantial) feature engineering. Fur-
ther, it has to be noted that the inhibitor classifica-
tion is not very strict. The quantitative inhibitor “pixel
count”, for instance, is reduced by occluding objects,
yet occlusion would count as an situational inhibitor.
The most impactful “contrast” measure found, mea-
sured an instances contrast against its background,
which obviously changes with an instance’s situation.
Table 1 summarizes the definition all found in-
hibitors, ordered (in general) by the iteration they
were found in. Also, in the authors’ experience, the
discovery of earlier inhibitors eased the discovery of
later inhibitors: After filtering out all instances that
were just “too small” or provided “too few pixels” to
be correctly identified by the AI, it became very ev-
ident that brightness and contrast might be the next
candidates for exploration.
Table 1: Description of all Evaluated Inhibitors.
Quantitive Inhibitors
depth distance of ego car to in-
stance measured in meters
contained human the fraction of a bounding
box occupied by the in-
stance.
log pixels the logarithm of the number
of image pixels making up
the instance
Perceptual Inhibitors
contrast the contrast of the instance
measured against its back-
ground
brightness the average luminance
within a bounding box
situational Inhibitors
fg share person the fraction of the in-
stance’s contour occupied
by another person
fg share vegetation the fraction of the in-
stance’s contour occupied
by vegetation
fg share car the fraction of the in-
stance’s contour occupied
by a vehicle
Gradient Boosting Quantile Regression. Deci-
sion rules were derived using Gradient Boosting
Models for Quantile Regression. Gradient Boosting
is a tree-based ensemble learning technique first de-
scribed in (Friedman, 2001), which has found various
applications, such as travel time prediction (Zhang
and Haghani, 2015) and energy consumption predic-
tion (Touzani et al., 2018). Quantile regression is a
statistical analysis aiming at the prediction of a vari-
able’s quantiles (i.e. values such that a fixed portion
of the observations lies below these values). Gradient
Boosting can be used for quantile regression when an
appropriate asymmetric loss function is chosen.
The 0.1-quantile was chosen for this analysis:
each selection rule was trained to select 10% of the
data. To train the Gradient Boosting Models, the input
dataset was split into 12597 training and 46212 test
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
68
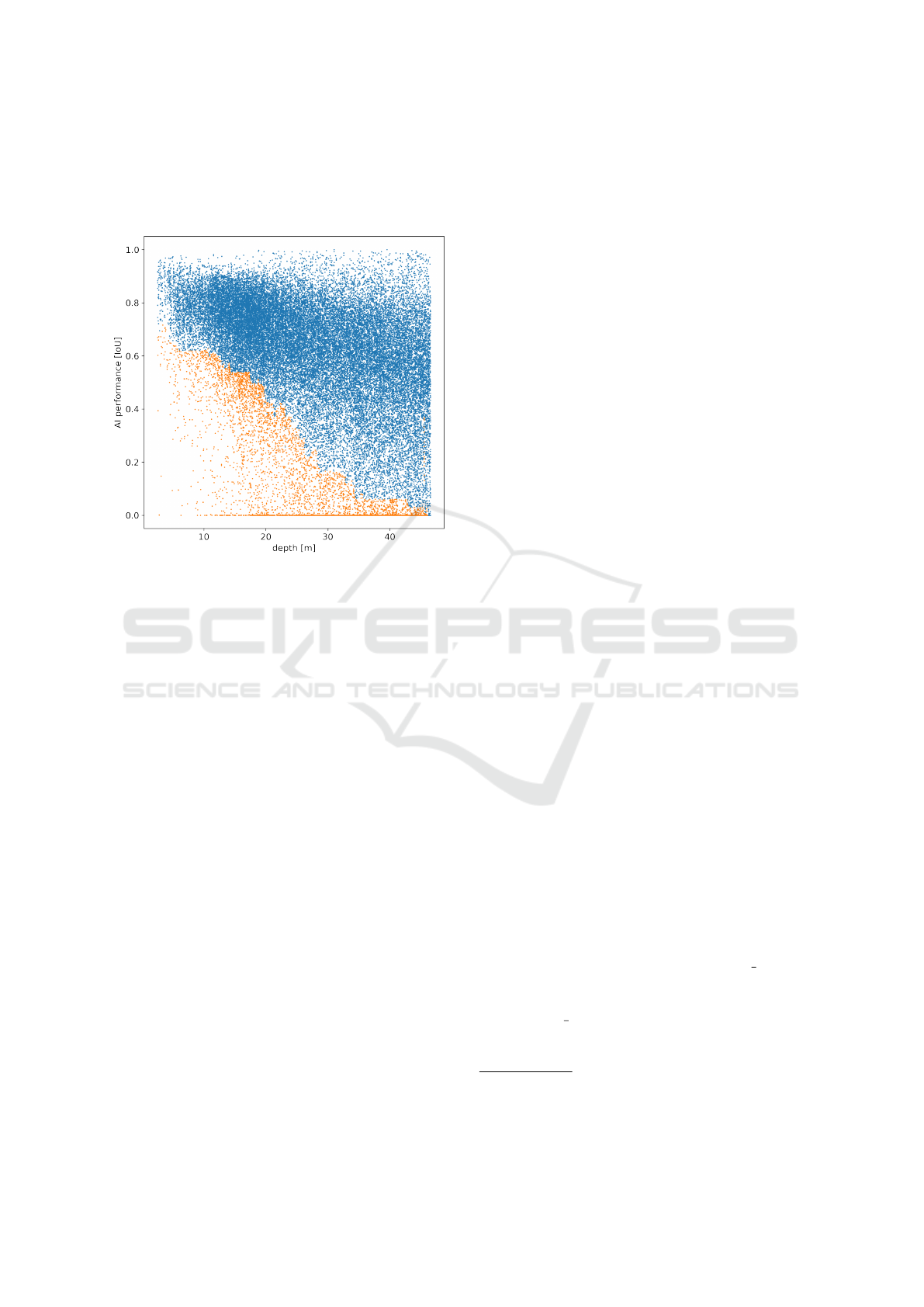
instances. Evaluated on the test instances, the trained
selection rules showed a good fit of to the data, select-
ing between 9.1% and 10.2% of the instances. Figure
4 shows the instance selection performed by S
depth
.
Figure 4: Scatter plot of AI-performance over instance
depth. Dots represent instances, orange dots are labelled
as corner case with respect to depth.
Selector Novelty and Method Termination. Each
additionally applied selection rule reduces the num-
ber of selected instances, and a selection rule based
on a 0.1-Quantile Regression Model would have, if
perfectly fit to the data, an information content of
3.21 ≈ −log
2
(0.1). In the following, an empirical in-
formation content value is used by replacing the prob-
ability of choosing an instance by its observed relative
frequency. In this way, a set of fitted selection rules
can be associated with their combined information
content value, and a new inhibitor candidate, found
in the hypothesis formulation phase, can be evaluated
by the extends it adds to this value.
Note that one could also use relative changes in
the size of the selected dataset to make this analysis
(halving the size of the current dataset increases the
information content value by exactly one), but the no-
tion of “adding n bits of information” instead of “de-
creasing a fraction by n percent” proved just to be the
more intelligible way of displaying this information.
Another way to describe the novelty a new in-
hibitor presents, is to use correlation measures be-
tween inhibitors (such as that brightness naturally cor-
relates with contrast), or set similarity measures be-
tween the regarding corner case datasets (a “bright-
ness corner case” might also be a “contrast corner
case”, etc.). Yet, all corner case are datasets are, to
some degree, expected to be similar, because they all
filter for the common property of relatively low AI-
performance.
As motivated in Section 3, the (empirical) infor-
mation gain of a new selection rule encodes “how
much more surprising a corner case is” when includ-
ing the new selection rule. This can be used to set
a threshold for the termination: If no new selection
rules with a information gain above a fixed threshold
can be found, the method terminates with the produc-
tion of a final corner case dataset (which contain up
to date unexplained corner cases).
Figure 5 (left) shows the growth of information
content provided by increasing the number of selec-
tion rules. The “later” rules seem to contribute less
information, which might be in part due to the fact
that these rules have less observations cut away from:
The order of rule application might influence their in-
formation gain. To explore this effect, Figure 5 (right)
shows the mean information gain added by each se-
lection rule, when compared to a fixed number of pre-
viously applied selection rules. The figure suggests
that firstly, selection rules provide less information if
they are introduced later, and secondly that the situa-
tional inhibitors yield in general less informative se-
lection rules.
Validation Experiments. The introductory exam-
ple shown in Figure 2 suggests that the corner cases
selected after the final iteration are indeed “interest-
ing or “surprising”, yet such a claim needs substanti-
ation. If the selection rules worked as intended, then
distorting an input image in a way that distracts the
AI, while using measures that the selection rule does
not account for (i.e. without changing any of the in-
hibiting features), should lead to higher corner case
selection rates. Similarly, if one distracts the AI with
measures that are accounted for (for instance by dark-
ening the image; brightness is an inhibitor), no further
corner cases should be selected.
To test this hypothesis, 6 frame augmentation
techniques were implemented, and hypotheses on
the effects on corner case rates were made. Fig-
ure 6 gives examples for each of the applied aug-
mentations. The augmentations were chosen such
that AI-performance could be reduced by manipu-
lating a single augmentation property. Fog augment
adds a blur effect of adjustable strength to the frame,
which is implemented by the python automold li-
brary
2
. Noise augment adds normally distributed ran-
dom values to the frame’s color values, the variance
2
https://towardsdatascience.com/automold-specialize
d-augmentation-library-for-autonomous-vehicles-1d085ed
1f578
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance
69
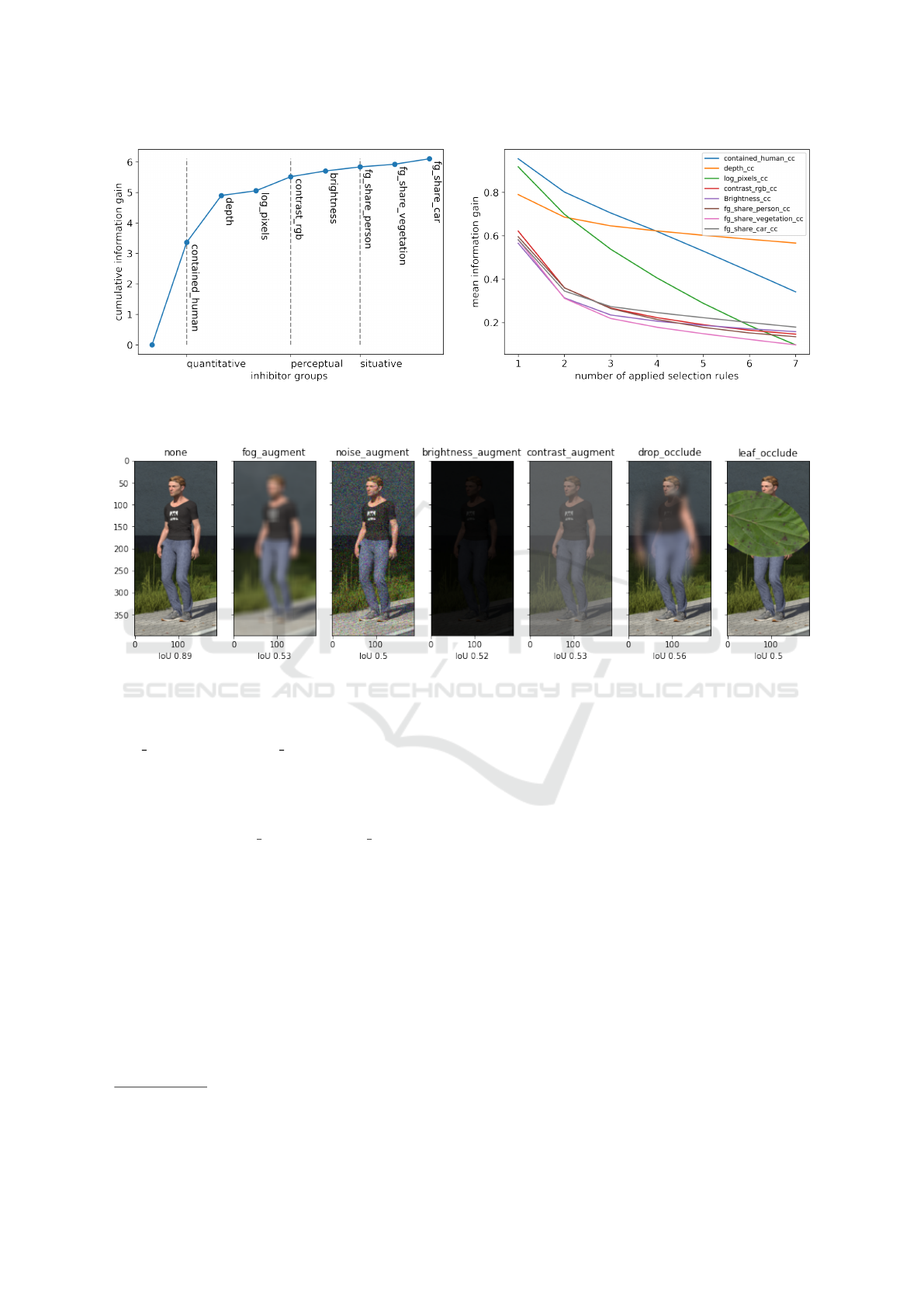
Figure 5: Information gain for different selection rules. Left: Cumulative information gain in order of discovery. Right: Mean
information gain for a varying number of previously applied rules.
Figure 6: Examples of augmented images, using different augmentation algorithms. Left-most: The original image. All
augmenters were calibrated to inhibit the AI to a similar degree.
of which can be varied to control effect size. Bright-
ness augment and contrast augment are implemented
using the python PIL ImageEnhance module
3
, each
allowing to adjust target values (0 brightness result-
ing in a perfectly black image, and 0 contrast result-
ing in a single-color image of the average brightness
of the original). Drop occlude and leaf occlude are
original implementations adding drop effects or over-
laying the image with images of leafs. In both cases,
effect placements and sizes can be adjusted, while ef-
fect size had the most predictable effect on AI perfor-
mance.
The examples in Figure 6 show applied augmen-
tations which were calibrated to reduce the AI perfor-
mance by about 0.35% (note that due to the random
nature of some of the augmentations, perfect values
were not striven for). It was quickly found that, by
sampling over a sufficiently large dataset, AI inhibi-
tion was a sufficiently continuous and monotone func-
tion over the augmenter-specific arguments: Altering
3
https://pillow.readthedocs.io/en/stable/reference/Imag
eEnhance.html
the augmenter little resulted in little performance dif-
ference, and increasing suited arguments (leaf size,
noise level, etc) resulted consistently in reduced per-
formance.
As for hypotheses, it could be expected that leaf
occlusion (which reduces the number of visible pix-
els) and reducing brightness would result in few se-
lected corner cases. Further, as the net seems to be
very brittle against added noise, and because such
noise should not largely influence features the cor-
ner case selector accounts for, added noise should re-
sult in many corner cases. It was also expected that
adding fog, adding droplet effects, and reducing con-
trast, should result in similar corner case rates because
the results are very similar in nature.
Figure 7 shows the mean frequency of identi-
fied corner cases over mean AI inhibition for differ-
ent augmenters which were “turned up” to increas-
ingly inhibit AI performance. Note that the mean
AI-performance on the sample is at 57.0%, limiting
mean inhibition rates to that value. Further, the cor-
ner case rate among the not augmented instances was
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
70
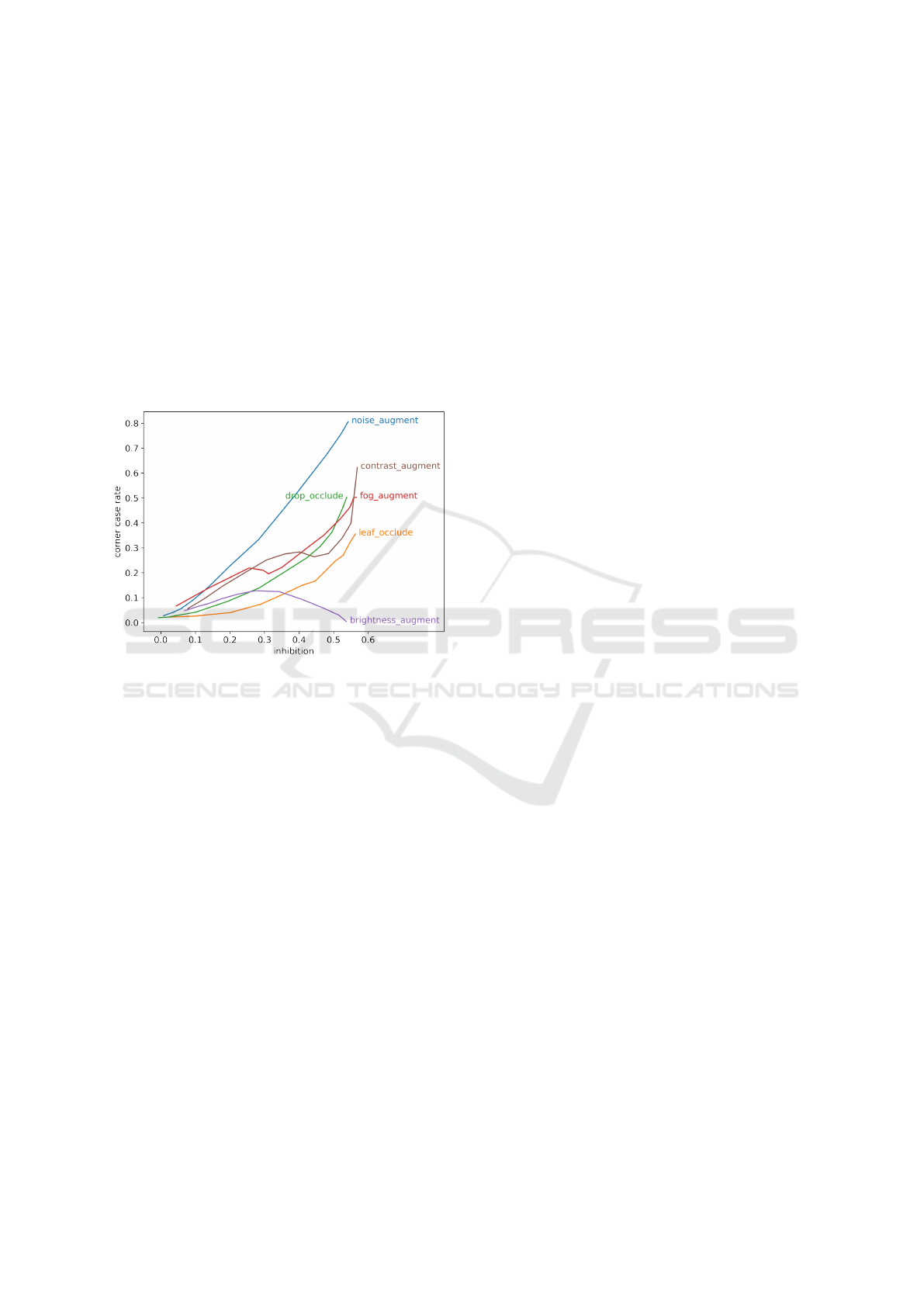
at 0.15%. In general, the hypotheses were found to be
true. Adding noise was, as expected, very effective in
producing corner cases. For high inhibitions, reduc-
ing brightness does not yield corner cases which is in
line with the intuition: It is not surprising that a very
dark image is unrecognizable to the AI. An interest-
ing effect is recorded for leaf occlusions: After start-
ing at an expectedly low slope, corner case rates rise
strongly for larger inhibitions. It can only be assumed
that at at a certain leaf size, the AI got distracted, un-
able to recognize a consistent instance behind the leaf.
Note that the inhibition recorded in the example (Fig-
ure 6) of 39% required a fairly large leaf to be added
to the frame.
Figure 7: Corner case rates for different augmentation algo-
rithms over their caused inhibition.
Interestingly, all augmenters produced many cor-
ner cases, surpassing the corner case baseline of
0.15% with relative small inhibitions. In other words:
If one of these effects had been present in the original
dataset it would have probably been discovered in one
of the exploration phases.
5 DISCUSSION
In the following, the results presented in Section 4
are discussed. By using the method, a total of 8
performance-inhibiting features were found in 8 iter-
ations, and the derived selection rules showed a rela-
tively good fit to the data which was shown by using
a train test split.
The novelty of additional selection rules was mea-
sured using their added information content (informa-
tion gain). Rules that were found in later iterations
showed a smaller information gain, even when cor-
recting for selection rule order. This suggests that
the method had more or less “exhausted” the dataset.
A ninth iteration, which tested several other inhibitor
candidates was attempted, but failed. This does not
mean that all AI inhibitors were found, but it is a
strong indicator, that the dataset does not allow fur-
ther conclusions. To illustrate this (arguably subtle)
statement, results from the final (failed) iteration are
briefly illustrated: By analysing the final corner case
dataset, it became apparent the selection was biased
for instances wearing muted colors, with the few in-
stances wearing bright colors being significantly less
often selected in the corner case dataset. A feature
measuring the mean color saturation of an instance
was defined, tested, and did indeed reflect the in-
tended purpose; yet the derived selection rule showed
only a minimal information gain, the main problem
being that there were simply very few “colorful in-
stances” in the dataset.
Validation experiments testing the sensibility of
the selection rules showed positive results: Effects de-
terring the AI, which were unaccounted for by the se-
lection rules, did indeed yield to very high corner case
selection rates. This suggests that the method would
have found these effects if they had been present in
the dataset. While this is a promising result, it would
have been interesting to find more AI inhibitors within
the original dataset. The experiments suggest that
strange clothing, optical effects, and occlusions of
specific body parts might deter the AI. Yet this would
have required more, and different, test data including
more ground truth information on the one hand, and
a bigger variety of instances on the other. It has to be
noted that the production of such data is, at time of
writing this report, still ongoing, aiming among oth-
ers specifically at these shortcomings of the data. In
general, the method seems to allow for a constructive
critique of a test dataset.
Apart from validating the method, the augmen-
tation experiments resulted in other findings. Most
surprising was the brittleness of the AI towards ran-
dom noise, and other blurring effects, while seeming
very robust against dark images. This validates, once
more, the underlying assumption that, while imple-
menting human-like perception, AI models may be-
have “non-intuitively” from a human perspective.
Method Limitations. A major critique that can be
brought up against the method is that it can only find
corner cases which are present within the dataset.
And while the method yielded suggestions on what
to include in additional datasets, for the evaluated use
case, this must not hold for any future application.
Yet, it is the authors’ impression that such evalua-
tions will most likely yield constructive critiques on
the data quality, features to be included (and bugs to
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance
71

be fixed) even if applied in other domains.
The second main limitation of the method lies in
its hunger for data. The application discussed above
relied on a very generous test dataset, which even al-
lowed further splitting. As any data scientist may tell,
this cannot be expected in any project.
Future Work. As mentioned above, the work pre-
sented in Section 4 is still ongoing, with more
data being produced and robustified AI-models being
trained. The immediate future work will include re-
running the method on that new input.
Besides these works, two additions to the method
were motivated by the current results. Firstly, vali-
dation experiments, which were initially conducted to
validate the method in general, may become a part
of any application. It was by attempting such ex-
periments, i.e. trying to manufacture specific corner
cases, that much information on the AI was gained.
Secondly, the method may reflect on the possibil-
ity to choose different performance measures. To
come back to the introductory example shown in Fig-
ure 3 one more time: The well contrasted and well
lit instance was wrongly classified as “building” and
the dark instance was misclassified as “vegetation”.
There could be general rules underlying patterns of
misclassification, but with a single performance mea-
sure (IoU in this case) these could not be found. A
next step could involve starting anew with the same
AI and dataset, yet evaluating against a different per-
formance measure. Note that these further evaluations
would be motivated by the findings of the first appli-
cation.
Finally, future work will attempt to apply the
method to new use cases so as to refine and rework
the method.
6 CONCLUSION
In this report, a novel method for AI quality assur-
ance was proposed. The method aims at finding “cor-
ner cases” which are loosely defined as “unexpect-
edly bad AI performances” in an input dataset. To
this end, an iterative approach is used where each it-
eration produces selection rules modelling the current
expectations towards the AI. Statistical measures on
how to measure a rule’s novelty were proposed, and
suggestions on defining termination rules are given
(while these will arguably depend largely on the spe-
cific use case). The method was applied to a use case
in Autonomous Driving on a synthetically generated
dataset, which generally validated the effectiveness of
the approach. Apart from showing the method’s gen-
eral effectiveness, the method’s strength seems to lie
in producing findings on the AI and the dataset as a
bi-product. The method’s limitations and future work
were discussed.
ACKNOWLEDGEMENTS
The research leading to these results is funded by the
German Federal Ministry for Economic Affairs and
Energy within the project “KI Absicherung – Safe AI
for Automated Driving”. The authors would like to
thank the consortium for the successful cooperation,
specifically partners from the Robert Bosch GmbH
for providing the constrast measures, and the Intel
Coorperation for providing the trained AI for evalu-
ation.
REFERENCES
Bolte, J.-A., Bar, A., Lipinski, D., and Fingscheidt, T.
(2019). Towards corner case detection for autonomous
driving. In 2019 IEEE Intelligent vehicles symposium
(IV), pages 438–445. IEEE.
Cardelli, L., Kwiatkowska, M., Laurenti, L., and Patane,
A. (2019). Robustness guarantees for bayesian in-
ference with gaussian processes. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 33, pages 7759–7768.
Chai, C., Cao, L., Li, G., Li, J., Luo, Y., and Madden,
S. (2020). Human-in-the-loop outlier detection. In
Proceedings of the 2020 ACM SIGMOD International
Conference on Management of Data, pages 19–33.
Challen, R., Denny, J., Pitt, M., Gompels, L., Edwards, T.,
and Tsaneva-Atanasova, K. (2019). Artificial intelli-
gence, bias and clinical safety. BMJ Quality & Safety,
28(3):231–237.
Chandola, V., Banerjee, A., and Kumar, V. (2009).
Anomaly detection: A survey. ACM computing sur-
veys (CSUR), 41(3):1–58.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). Carla: An open urban driving sim-
ulator. In Conference on robot learning, pages 1–16.
PMLR.
Freeman, C. and Beaver, I. (2019). Human-in-the-loop se-
lection of optimal time series anomaly detection meth-
ods.
Friedman, J. H. (2001). Greedy function approximation: a
gradient boosting machine. Annals of statistics, pages
1189–1232.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
72

Gauch Jr, H. G., Gauch Jr, H. G., and Gauch, H. G. (2003).
Scientific method in practice. Cambridge University
Press.
Hamada, K., Ishikawa, F., Masuda, S., Myojin, T., Nishi,
Y., Ogawa, H., Toku, T., Tokumoto, S., Tsuchiya, K.,
Ujita, Y., et al. (2020). Guidelines for quality assur-
ance of machine learning-based artificial intelligence.
In SEKE, pages 335–341.
Hanhirova, J., Debner, A., Hyypp
¨
a, M., and Hirvisalo, V.
(2020). A machine learning environment for eval-
uating autonomous driving software. arXiv preprint
arXiv:2003.03576.
Hawkins, D. M. (1980). Identification of outliers, vol-
ume 11. Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Heaton, J. (2016). An empirical analysis of feature en-
gineering for predictive modeling. In SoutheastCon
2016, pages 1–6. IEEE.
Hendrycks, D., Zhao, K., Basart, S., Steinhardt, J., and
Song, D. (2021). Natural adversarial examples. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 15262–
15271.
Hosseini, H. and Poovendran, R. (2018). Semantic adver-
sarial examples. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 1614–1619.
Huang, X., Kwiatkowska, M., Wang, S., and Wu, M.
(2017). Safety verification of deep neural networks.
In International conference on computer aided verifi-
cation, pages 3–29. Springer.
Isele, D., Rahimi, R., Cosgun, A., Subramanian, K., and Fu-
jimura, K. (2018). Navigating occluded intersections
with autonomous vehicles using deep reinforcement
learning. In 2018 IEEE International Conference on
Robotics and Automation (ICRA), pages 2034–2039.
IEEE.
Islam, M. R., Das, S., Doppa, J. R., and Natara-
jan, S. (2018). Glad: Glocalized anomaly detec-
tion via human-in-the-loop learning. arXiv preprint
arXiv:1810.01403.
Jones, D. S. (1979). Elementary information theory. Oxford
University Press, USA.
Kwiatkowska, M. Z. (2019). Safety verification for deep
neural networks with provable guarantees. In 30th
International Conference on Concurrency Theory
(CONCUR 2019). Schloss Dagstuhl-Leibniz-Zentrum
fuer Informatik.
Lateef, F. and Ruichek, Y. (2019). Survey on semantic seg-
mentation using deep learning techniques. Neurocom-
puting, 338:321–348.
Lenarduzzi, V., Lomio, F., Moreschini, S., Taibi, D., and
Tamburri, D. A. (2021). Software quality for ai:
Where we are now? In International Conference on
Software Quality, pages 43–53. Springer.
Nortey, E. N., Pometsey, R., Asiedu, L., Iddi, S., and Mettle,
F. O. (2021). Anomaly detection in health insurance
claims using bayesian quantile regression. Interna-
tional Journal of Mathematics and Mathematical Sci-
ences, 2021.
Pei, K., Cao, Y., Yang, J., and Jana, S. (2017). Deepxplore:
Automated whitebox testing of deep learning systems.
In proceedings of the 26th Symposium on Operating
Systems Principles, pages 1–18.
Poth, A., Meyer, B., Schlicht, P., and Riel, A. (2020). Qual-
ity assurance for machine learning–an approach to
function and system safeguarding. In 2020 IEEE 20th
International Conference on Software Quality, Relia-
bility and Security (QRS), pages 22–29. IEEE.
Reinke, A., Tizabi, M. D., Eisenmann, M., and Maier-Hein,
L. (2021). Common pitfalls and recommendations for
grand challenges in medical artificial intelligence. Eu-
ropean Urology Focus, 7(4):710–712.
Secci, F. and Ceccarelli, A. (2020). Rgb cameras failures
and their effects in autonomous driving applications.
arXiv preprint arXiv:2008.05938.
Tian, Y., Pei, K., Jana, S., and Ray, B. (2018). Deeptest:
Automated testing of deep-neural-network-driven au-
tonomous cars. In Proceedings of the 40th inter-
national conference on software engineering, pages
303–314.
Tjeng, V., Xiao, K., and Tedrake, R. (2017). Evaluating
robustness of neural networks with mixed integer pro-
gramming. arXiv preprint arXiv:1711.07356.
Touzani, S., Granderson, J., and Fernandes, S. (2018). Gra-
dient boosting machine for modeling the energy con-
sumption of commercial buildings. Energy and Build-
ings, 158:1533–1543.
Waldmann, E. (2018). Quantile regression: a short story on
how and why. Statistical Modelling, 18(3-4):203–218.
Wicker, M., Huang, X., and Kwiatkowska, M. (2018).
Feature-guided black-box safety testing of deep neu-
ral networks. In International Conference on Tools
and Algorithms for the Construction and Analysis of
Systems, pages 408–426. Springer.
Wu, Y., Yu, T., and Hua, G. (2003). Tracking appearances
with occlusions. In 2003 IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion, 2003. Proceedings., volume 1, pages I–I. IEEE.
Xie, X., Ho, J. W., Murphy, C., Kaiser, G., Xu, B., and
Chen, T. Y. (2011). Testing and validating machine
learning classifiers by metamorphic testing. Journal
of Systems and Software, 84(4):544–558.
Xu, Q., Fan, Z., Jia, W., and Jiang, C. (2019). Quantile re-
gression neural network-based fault detection scheme
for wind turbines with application to monitoring a
bearing. Wind Energy, 22(10):1390–1401.
Zhang, Y. and Haghani, A. (2015). A gradient boosting
method to improve travel time prediction. Trans-
portation Research Part C: Emerging Technologies,
58:308–324.
Zheng, A. and Casari, A. (2018). Feature engineering for
machine learning: principles and techniques for data
scientists. ” O’Reilly Media, Inc.”.
Highly Automated Corner Cases Extraction: Using Gradient Boost Quantile Regression for AI Quality Assurance
73
