
Preprocessing of Terrain Data in the Cloud using a Workflow
Management System
Marvin Kaster
1,2 a
and Hendrik M. W
¨
urz
1,2 b
1
Fraunhofer Institute for Computer Graphics Research IGD, Fraunhoferstraße 5, Darmstadt, Germany
2
Technical University of Darmstadt, Karolinenplatz 5, Darmstadt, Germany
Keywords:
Cloud Computing, Geospatial Data, Workflow Management, Computational Models for Big Data.
Abstract:
The preparation of terrain data for web visualization is time-consuming. We model the problem as a scientific
workflow that can be executed by a workflow management system (WMS) in a cloud-based environment. Such
a workflow management system provides easy access to the almost unlimited resources of cloud infrastructure
and still allows a lot of freedom in the implementation of tasks. We take advantage of this and optimize the
computation of individual tiles in the created level of detail (LOD) structure, as well as the scheduling of
tasks in the scientific workflow. This enables us to utilize allocated resources very efficiently and improve
computation time. In the evaluation, we analyze the impact of different storage endpoints, the number of
threads, and the number of tasks on the run time. We show that our approach scales well and outperforms our
previous work based on the framework GeoTrellis considerably (Kr
¨
amer et al., 2020).
1 INTRODUCTION
In recent years, workflow management systems
(WMS) have gained popularity. In the past, tasks
were simple enough to be solved by a single appli-
cation on a desktop computer. This is no longer pos-
sible. The amount of data is growing too fast, more
and more computing power is needed and updates
based on new input data have to be delivered more
frequently. At the same time, results should be repro-
ducible and calculated as fast as possible.
WMS provide a solution for this. They are based
on splitting the overall problem into subtasks. Each
subtask solves a small part of the problem and might
depend on other subtasks. The WMS recognizes these
dependencies and ensures a correct execution order.
Once all the steps are completed, it returns the final
result to the user.
WMS are already used in many areas of science:
The Montage workflow computes images of the night
sky (Berriman et al., 2004) and LODSEQ analyzes
genetic linkage (Larsonneur et al., 2018). Other ex-
amples can be found in the area of wildfire prediction
(Crawl et al., 2017), life science (Oinn et al., 2006)
and chemistry (Beisken et al., 2013).
a
https://orcid.org/0000-0002-6468-2122
b
https://orcid.org/0000-0002-4664-953X
When WMS are executed in the cloud, calcula-
tions can be highly parallelized. The WMS executes
the sub-tasks in a distributed way and delivers results
much faster compared to single instances.
In this paper, we present a workflow to prepare
terrain data for web visualization in Cesium (Cesium
GS, Inc., 2022). Our input data are images that en-
code height information in each pixel. Our output
data are triangle meshes in different resolutions that
can be visualized in Cesium. If the viewer looks at
the terrain from far away, a coarse triangle mesh is
loaded. The closer he gets, the more details are dis-
played.
Our goal is to compute the required level of de-
tail (LOD) structure as fast as possible. To do this, we
implement two ideas: 1) We reduce the computational
effort of the coarser levels by reusing previous results.
2) We decompose the calculation into subtasks and
execute them using a WMS. There are several possi-
bilities for modeling the workflow. We describe how
the subtasks should be selected and investigate how
well our approach scales in the cloud.
Finally, we compare our results with our previous
work. In the past, we solved the problem of terrain
preparation with the framework GeoTrellis (Azavea
Inc., 2021). We describe why our new approach leads
to considerably faster results and present ideas for fu-
ture work.
40
Kaster, M. and Würz, H.
Preprocessing of Terrain Data in the Cloud using a Workflow Management System.
DOI: 10.5220/0011145000003269
In Proceedings of the 11th International Conference on Data Science, Technology and Applications (DATA 2022), pages 40-49
ISBN: 978-989-758-583-8; ISSN: 2184-285X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2 RELATED WORK
An early approach to task parallelization of geospa-
tial data in the cloud was presented by Cui et al. They
described an abstract approach how remote-sensing
data should be processed. For this, they identified the
three subtasks pre-processing, processing and post-
processing. Cui et al. parallelized the subtasks across
multiple workstations and connected them via shared
storage. This led to an improvement compared to the
serial processing (Cui et al., 2010).
Nowadays, computation takes place in the cloud.
Several frameworks such as Apache Hadoop (Apache
Software Foundation, 2021) and Apache Spark (Za-
haria et al., 2010) support users in parallelizing their
applications across multiple VMs. GeoTrellis (Aza-
vea Inc., 2021) is a framework based on Apache Spark
and provides capabilities to read, write and manip-
ulate geospatial raster data. Jacobsen et al. used it
to detect harvests based on landscape changes. For
this, they built a system with several components. On
the one hand, a storage loads and caches data on de-
mand. On the other hand, a processing component
evaluates provided data. Both are controlled by a job
manager. It processes a job graph and distributes tasks
to the appropriate components. In this way, Jacobsen
et al. transferred the scalability of Apache Spark to
their problem. When computation capacity is needed,
GeoTrellis respectively Apache Spark takes care of
providing it. This is similar to our approach, where
we exploit the scalability of a workflow management
system to process terrain data.
As an alternative to GeoTrellis there is Geo-
Mesa (Hughes et al., 2015). While GeoTrellis is lim-
ited to raster data, GeoMesa can also handle vec-
tor data. Instead of Apache Spark it uses Apache
Hadoop, an open-source implementation of Map-
Reduce (Dean and Ghemawat, 2008).
MapReduce is based on the idea of splitting an al-
gorithm in two steps. The first one is called mapping.
The algorithm gets a list of key-value pairs as input
and produces a new list of pairs for each single pair.
Each input pair can be processed by a mapper inde-
pendent of the other ones. Therefore these mappers
can be parallelized. Afterwards the lists are reduced.
All values of a certain key in the former produced key-
value pair lists are processed together as a task. This
task produces a new list of key-value pairs. Again
all value lists can be processed independently of the
value list of other keys and enable parallelization of
the mappers. Wang et al. adapted MapReduce for
their own algorithm with an additional grid index to
reduce the number of computations of intersections
on GIS overlays (Wang et al., 2015). They demon-
strated their algorithm on a land change analysis by
analyzing polygon overlays. Their first MapReduce
task determines which polygons are in which grid.
The mapping tasks outputs grid-polygon pairs of each
grid based on the minimum bounding rectangle. In
the following reduce tasks, each grid has an assigned
list of possible polygons based on the mapping task
pairs. Now it is checked if a polygon is actually in
the grid. The second MapReduce task is to calculate
the overlap between the two polygon overlays. In the
mapping task, for each grid, all polygons are approx-
imately pair-wise checked for overlaps based on their
minimum bounding rectangle. The outputs are pairs
of intersecting polygons. Their intersection points are
calculated in the reducing task. In both MapReduce
tasks, the mapping task is an approximation of the ac-
tual task to reduce the amount of computations. The
resulting candidates are then checked in the reducing
task accurately.
Zhong et al. developed an architecture based on
Apache Hadoop for storing and processing geospatial
data for WebGIS applications (Zhong et al., 2012).
Their data is stored as key-value pairs across differ-
ent nodes. Each node processes its own data and ex-
changes only the results with a master node. They
call this processing model MapReduce-based Local-
ized Geospatial Computing Model.
Giachetta et al. developed a framework called
AEGIS based on Hadoop’s MapReduce (Giachetta,
2015). It processes high amounts of remote sensing
data in a distributed environment. The abstraction of
the framework enables adaption to different tasks but
makes the usage complex and still requires adaption
of algorithms to the MapReduce architecture.
Crayons is a system for parallel processing of GIS
data in the Microsoft Azure cloud (Agarwal, 2012). It
performs spatial polygon overlay operations between
two GIS layers of vector-based GML files. The com-
putation is parallelized by partitioning the data based
on the intersections of the polygons of the two in-
put layers. The partitioned data is then processed by
multiple workers using a queue for the partition ids.
In contrast to our approach, Crayons supports vector-
based data instead of raster data.
Hegeman et al. processed LiDAR data in the
cloud to generate an elevation model (Hegeman et al.,
2014). They read the whole data into the memory to
avoid slow I/O operations. This is a strong limitation
as it requires a lot of memory. However, this enables
fast operations. The data is reduced by averaging
neighbouring points and storing them with hashing.
Afterwards, the data set is divided into clusters which
are assigned to different nodes in the cloud. The
nodes divide their cluster further into cells to make
Preprocessing of Terrain Data in the Cloud using a Workflow Management System
41

use of multiple threads. They triangulate each cell
independently and combine them later. In contrast
to this approach, we do not read the whole data into
memory. However, we also split our data depending
on the number of computing units to ensure a good
utilization.
We use a workflow management system (WMS)
to manage calculation. Since WMS are an important
topic in the processing of big data, there are many
different systems. LWGeoWfMS is a WMS special-
ized on geospatial data (Du and Cheng, 2017). It en-
ables the sharing and management of resources across
different tasks. This includes the registration and
scheduling of available resources. Another WMS for
geographic data processing is GEO-WASA (Medeiros
et al., 1996). The WASA workflow environment is ex-
tended with functions for geo-processing. It enables
complex pipelines with a focus on geospatial data.
Similar to GEO-WASA, Geo-Opera (Alonso and Ha-
gen, 1997) also unites different geo-data processes
in one environment by extending the process engine
OPERA. The tasks are modeled as geo-processes,
running different software on heterogeneous hard-
ware.
These are WMS specialized for processing geo-
data. On the one hand, they provide a lot of functions
out of the box, but on the other hand, they also limit
the user. Custom ideas cannot be implemented easily
if they differ from the concepts of the systems. For
this reason, we use a general purpose WMS, namely
Steep (Kr
¨
amer, 2021). It enables us to scale our ap-
plication in the cloud and distributes tasks to differ-
ent VMs. At the same time, we retain full control
over the developed application logic and can imple-
ment problem-specific accelerations. Steep itself has
many features like a powerful scheduler that supports
hardware requirements for tasks, or different runtime
environments. The most important feature for our ap-
proach is the flexibility of the workflow definition.
The tasks are only defined at runtime. This is a pre-
requisite for our workflow presented in Section 3.2.
In our earlier work (Kr
¨
amer et al., 2020), we per-
formed the same task of terrain preprocessing with
GeoTrellis an top of Apache Spark instead of a WMS.
The frameworks made it possible to set up the pro-
cessing very easily. However, they also came with
some limitations that we want to address in this work.
GeoTrellis is only capable of handling raster data.
This is a huge drawback because it requires a com-
putationally expensive resampling of input data. Our
new approach circumvents this limitation and works
directly on the raw data. This prevents resampling
errors and speeds up processing. In addition, Spark
generates a lot of shuffle data during processing. This
data has to be written and read again, which slows
down the processing even more. In this work, we
avoid shuffle data and store only the final results. By
using a WMS, we can still run our computations in
the cloud, but are no longer restricted by a frame-
work. These advantages lead to a huge performance
improvement, which we present in this paper.
3 APPROACH
Our system generates a digital terrain model for
visualization based on height data from GeoTiff
files (Maptools.org, 2020). Our approach consists of
two parts: First, we present an efficient way to pro-
cess the data. For this we use results from the first
steps to speed up the later ones. Our second contribu-
tion is a representation of the problem as a scientific
workflow. In this way, jobs can be distributed across
many VMs in the cloud and computation is faster.
3.1 Level of Detail Generation
Large models are often visualized using a level of de-
tail structure. If the viewer is far away, a coarser res-
olution is loaded than if he is close. A data format for
terrain visualization is quantized mesh (CesiumGS,
2020). The LODs are based on a quadtree, starting
on the coarsest LOD 0 with two quadratic tiles. The
first tile covers the world west of the prime merid-
ian, the second everything east. In each level, the tiles
are divided into four sub-tiles to increase the overall
resolution. This means that the second coarsest level
(LOD 1) consists of eight tiles, and the LOD 2 has
32 tiles. This schema is specified by the Tile Map
Service (TMS) (Open Source Geospatial Foundation,
2012) in the global-geodetic profile.
Our system generates the tiles for each requested
LOD. The input data are GeoTiff files that encode a
height value in each pixel. However, this informa-
tion cannot be used directly since the quantized mesh
format requires no raster data, but a triangle mesh
for each tile. To generate it, the appropriate pixels
have to be extracted from the GeoTiff and then trian-
gulated. For this, we use a variant of the Delaunay
triangulation (Delaunay et al., 1934; De Berg et al.,
2008). In contrast to the original algorithm, we define
four corner points for each tile to obtain a closed sur-
face across tile boundaries. Furthermore, we only add
points to the triangle mesh until a certain accuracy is
reached. This results in a very coarse resolution of
LOD 0, while increasing LODs are more and more
accurate. For a more detailed explanation, we refer to
our earlier work (Kr
¨
amer et al., 2020).
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
42
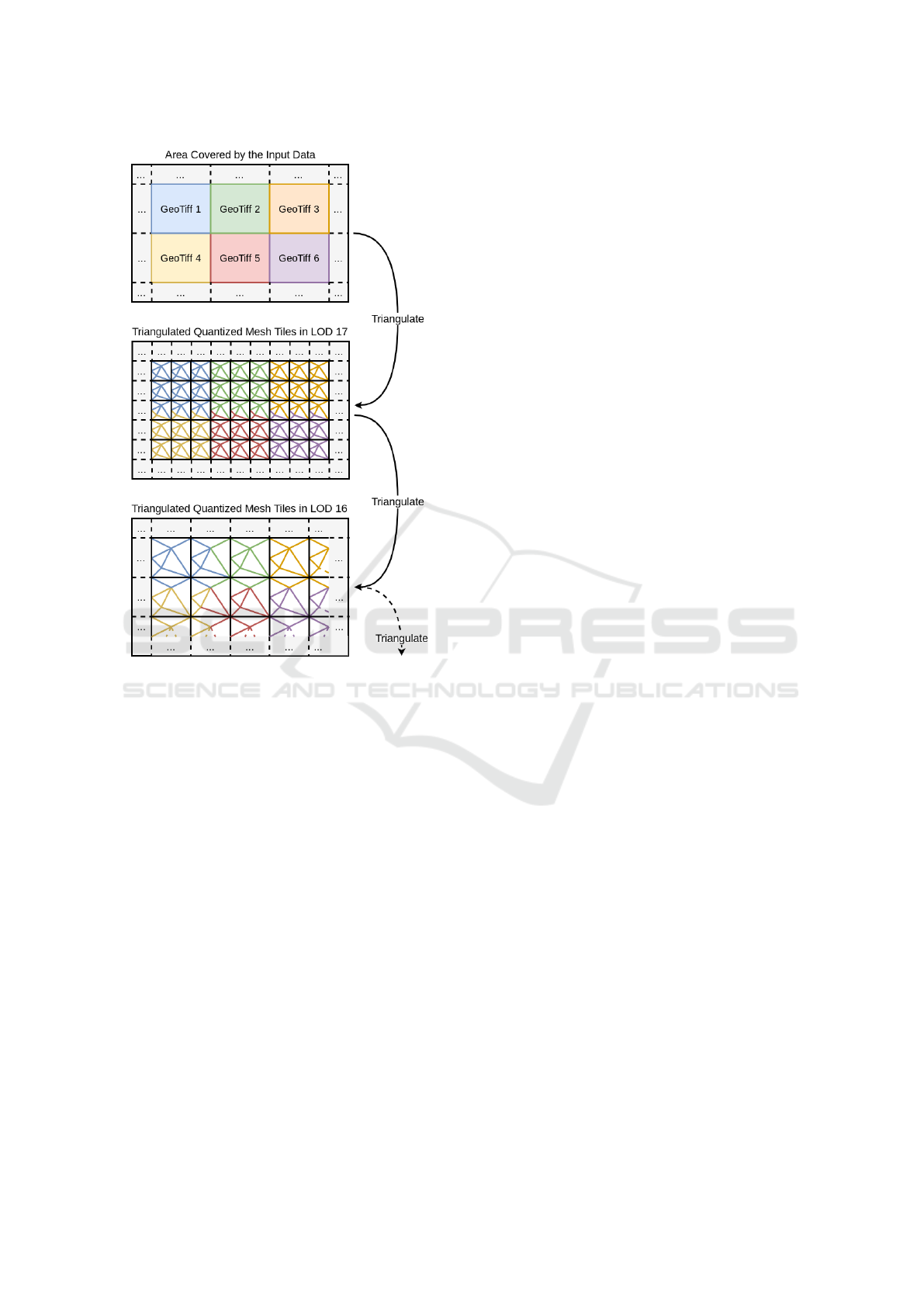
Figure 1: For each tile in the most accurate level (LOD 17
in this example), the required pixels are read from the input
GeoTiffs and triangulated. The resulting triangle meshes
are saved as quantized mesh files for each tile. These files
are ready for visualization. For a tile in LOD 16, we identify
the four tiles from LOD 17 on which it is based. We read
their vertices from the quantized mesh files and triangulate
them again with a coarser resolution. This is repeated until
we reach LOD 0 at the latest.
During LOD generation, we start at the most ac-
curate level. This level can be configured by the user
and should be selected depending on the resolution
of the input data. Figure 1 illustrates the process
with LOD 17 as most accurate level. We access the
GeoTiff files and compute the corresponding triangle
meshes. It is possible that a tile exceeds the bound-
aries of a GeoTiff. In this case, we read the required
pixels from multiple GeoTiff files. For example, this
applies to the tiles in the third row in Figure 1. We
store the triangulated tiles as quantized mesh files,
they are ready for visualization.
All other LODs are triangulated using the quan-
tized mesh files of the previous LOD as input. We
first identify the four sub-tiles of the tile to be com-
puted. Then we access the corresponding quantized
mesh files and read the vertices from their triangle
meshes. These vertices are triangulated again, with
a higher allowed error. In this way, not all points are
used and the resolution of the new tile is lower. Fi-
nally, we save the new tile as a quantized mesh file
to make it available for the next coarser LOD and for
later visualization.
This approach has two major advantages: First,
the triangulation of the coarser levels is much faster,
since fewer points have to be considered. If we would
work on the original GeoTiff files instead, the coars-
est level would require reading the entire dataset. This
would take a lot of time and is not a practical solution.
Second, no separate data structure has to be stored be-
tween the LODs, because the quantized mesh files are
used directly. This saves I/O operations and speeds up
calculation.
3.2 Representation as a Scientific
Workflow
A scientific workflow consists of multiple tasks. They
may depend on each other if the outputs of one task
are needed as inputs for the other. In this case a se-
quential execution is necessary, otherwise the execu-
tion can be parallelized. The workflow management
system detects these dependencies and schedules the
execution in the cloud. We translated the terrain gen-
eration problem into the workflow illustrated in Fig-
ure 2.
As described above, the terrain data we generate
should be visualized in Cesium. For this, Cesium
needs a metadata file to know which tiles it can re-
quest. The file is created by our first task called Cre-
ate Layers File. It takes the extent of the area to be
calculated, as well as the requested LODs and writes
the tiles to a JSON file. In addition, the task creates a
file in which the number of the highest, i.e. the most
accurate LOD is stored. This file is read by the second
task Generate Keys.
A naive approach for tile generation would be to
call the triangulation task for each tile in a LOD. In
theory, this approach enables maximum parallelism
since each tile could be generated simultaneously. In
practice, however, this parallelism would never be ex-
ploited. Even moderately large data sets lead to sev-
eral thousand tiles in the highest LOD. It is very un-
likely that so many VMs should be used and there-
fore, most of the tiles would be created one after the
other. Nevertheless, the workflow management sys-
tem would have to send a job to the VM for each tile
and receive the result. This adds unnecessary com-
munication overhead, which is why we introduced
batches.
Preprocessing of Terrain Data in the Cloud using a Workflow Management System
43
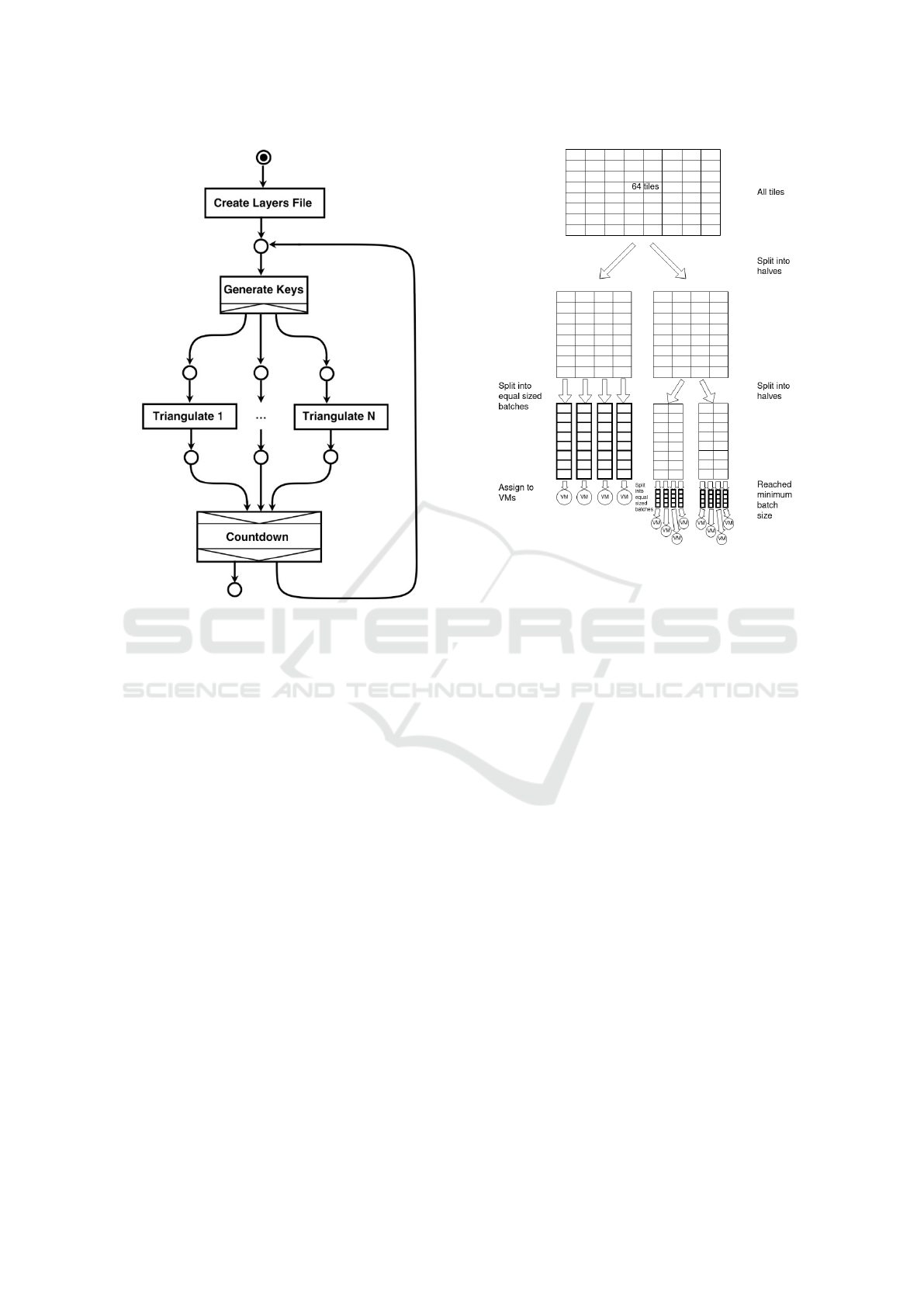
Figure 2: Workflow to generate a digital terrain model. Cre-
ate Layers File produces a metadata file for visualization,
Generate Keys groups multiple tiles into batches for a faster
processing and Triangulate calculates a triangle mesh for
each tile in a batch. Countdown iterates through all re-
quested level of detail and terminates the workflow when
completed.
The Generate Keys task groups the tiles of one
LOD into batches. As a result, the workflow man-
agement system will only distribute batches to the
VMs and not tiles. The batches should neither be too
large nor too small. If too few tiles are grouped, the
communication overhead will not be reduced. On the
other hand, the batches should not be too large ei-
ther. When a VM has finished processing its batch,
the workflow management system assigns a new one
to it. At some point all the batches of a LOD have
been distributed and it is necessary to wait for their
completion. The larger the batches, the more likely
it is that some VMs will finish considerably before
others. This reduces parallelism and slows down the
overall processing time.
An optimal batch size depends on the overhead for
executing a task, the number of VMs and the run time
of a process. These factors vary depending on the
used hardware and data. While it is possible to find a
good batch size by trying different sizes, an automa-
tism would be favorable. We developed an algorithm
Figure 3: Grouping of tiles into batches. Each cell repre-
sents a tile. This example illustrates the grouping of 64 tiles
with 4 VMs and a minimum batch size of 4.
to define the batches automatically. It avoids a fixed
batch size and instead varies the batch size during the
triangulation process. We start with large batches to
keep the VMs busy for a long time. Towards the end,
we use smaller batches. This enables us to react to
faster VMs and distribute remaining work more flexi-
ble.
Figure 3 illustrates our grouping of tiles into
batches and their assignment to VMs. Generate Keys
splits the amount of tiles in two halves. The first half
is distributed equally to all available VMs. This leads
to large batches so that many tiles can be calculated
with low communication overhead. The remaining
half of tiles is cut into halves again. Each new half
contains now a quarter of all tiles. The first one is used
to generate as many batches as there are VMs again.
These new batches are smaller and enable the WMS
to react to different processing speeds of the VMs. To-
wards the end of the computation, this becomes more
important, which is why our batches are also getting
smaller. We continue halving and distributing the re-
maining tiles until the batch size is smaller than a se-
lected minimum. This minimum is the only configu-
ration the user has to provide. It can be set depending
on the performance of the VMs and the complexity of
the triangulation.
With our adaptive batch size, we can minimize the
communication overhead with the VMs and still as-
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
44

sign new batches until the end. However, this flexi-
bility must be supported by the WMS. In the imple-
mentation, a WMS has to be chosen that allows the
definition of tasks during run time.
When all batches for a LOD are processed, the
Countdown task reduces the LOD by one. Like Cre-
ate Layers File it creates a file in which the next LOD
is written down. This triggers the Generate Keys that
will group the tiles of this LOD to batches again.
When we reach the desired smallest LOD, Count-
down will not produce an output file and the workflow
terminates. The smallest LOD is at least 0 but can be
chosen higher if it makes sense for the input data.
4 EVALUATION
We evaluated our approach with the workflow man-
agement system Steep (Kr
¨
amer, 2021). It supports
new tasks during run time and can be installed in a
cloud-based environment (Kr
¨
amer et al., 2021).
As input data we used GeoTiff files, covering the
federal state of Hesse, Germany. Hesse has a total
area of approximately 20 thousand km
2
and our input
data consists of 973 files with a total size of 84 GB.
Each file has 5000 × 5000 pixels and a resolution of
one pixel per square meter. The data set is owned by
Hessian State Office for Land Management and Geo-
Information (HVBG), a version with XYZ files in-
stead of GeoTiff is available as open data (Hessisches
Landesamt f
¨
ur Bodenmanagement und Geoinforma-
tion, 2021).
In our evaluation we generate LOD 6 to 17.
LOD 17 is sufficient to represent our highest resolu-
tion of one square meter. A coarser resolution than
LOD 6 does not make sense, because Hesse will be
too small in relation to the whole world. We calcu-
lated the LODs in a cloud-based environment (Sec-
tion 4.1) and examined the influence of various factors
on processing speed including parallelization (Section
4.2), the size of the batches (Section 4.3) and the in-
fluence of the storage backend (Section 4.4).
4.1 Cloud Setup
The processing of the terrain data should be as effi-
cient as possible. For this reason, we installed Steep
(version 5.9.0) in an OpenStack (Sefraoui et al., 2012)
cloud. Steep only starts VMs when there is something
to compute, afterwards they are shut down again.
Since terrain data only needs to be processed very ir-
regularly, such a setup reduces operating costs con-
siderably compared to a classic server solution.
Our whole architecture is shown in Figure 4.
Steep itself is running on an instance with two cores
and 8 GB of RAM. When it receives a new workflow,
Steep starts new VMs to execute the tasks. These
VMs have 4 cores and 4 GB of RAM each.
Figure 4: System architecture.
The VMs have access to different storage back-
ends. The first one is a distributed file system based
on GlusterFS (Red Hat Inc., 2019) and mounted us-
ing NFS. It is installed in the same OpenStack envi-
ronment than the other VMs and consists of multiple
instances with 2 cores, 8 GB memory and a hard disk.
Since the exact number of instances varies during our
evaluation, we will specify it with the measurements.
In Section 4.4 we will replace GlusterFS by AWS S3
(Amazon Web Services, Inc., 2021) as well as with a
private object store.
4.2 Parallelization
As mentioned in Section 4.1, our VMs have 4 cores.
We want to exploit them by computing multiple tiles
of a batch at the same time. For this we start several
threads on a VM. Each thread takes one tile from the
currently processed batch and computes it. When this
is done, it takes the next one until the whole batch is
1 2 4 8 16 32
0
1,000
2,000
1,897
991
459
351
365
425
Threads
Run time in minutes
Figure 5: Run time of 1 VM and 1 GlusterFS server with
different number of threads. Red line marks linear scaling.
Until 8 threads the run time decreases, afterwards it increase
again.
Preprocessing of Terrain Data in the Cloud using a Workflow Management System
45
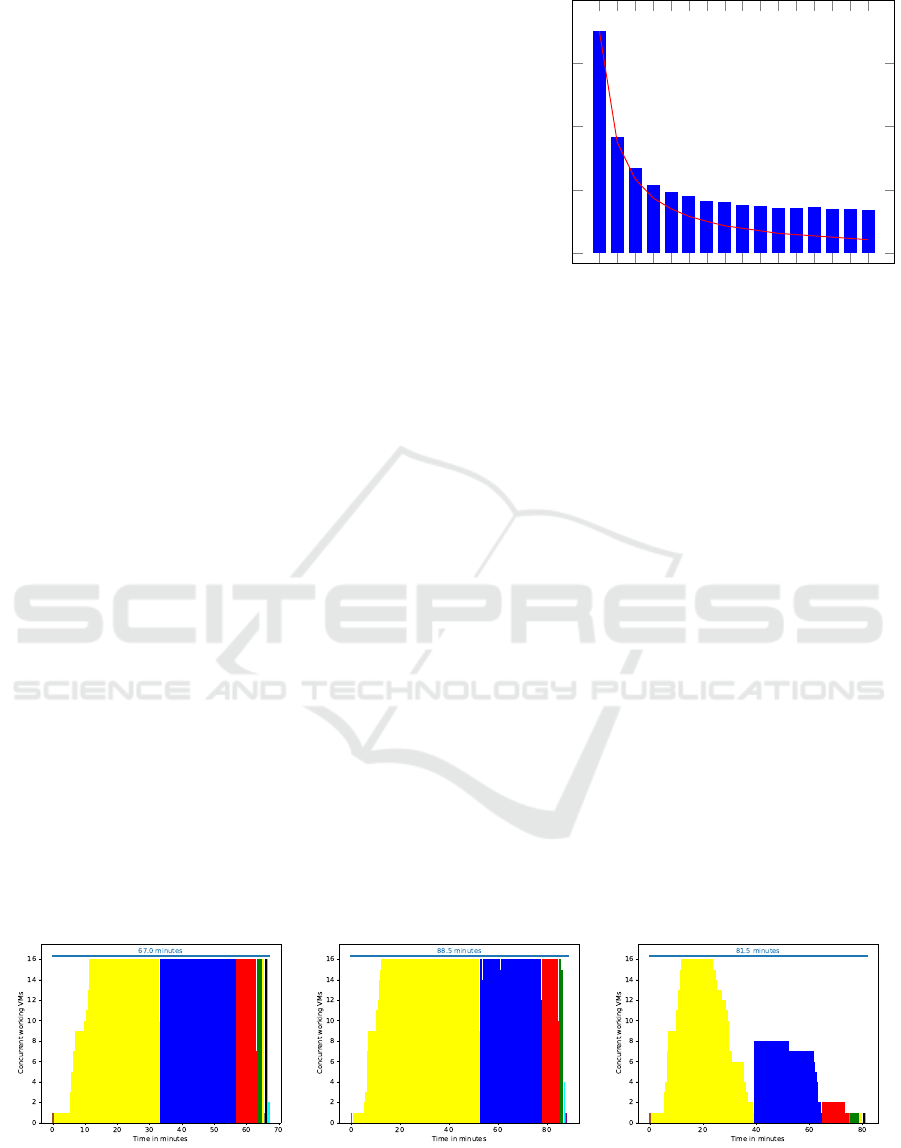
processed. Figure 5 illustrates the influence of mul-
tiple threads on the total run time. An increase from
1 to 2 threads halves the run time. The same applies
to the change from 2 to 4 threads. This was expected,
since all cores of the VM are used in this way.
However, eight threads reduce the run time even
further before it increases again with 16 or more
threads. This can be explained by slower I/O oper-
ations. To compute a tile, the input data must be re-
trieved from the storage backend and the finished tile
has to be written back. Since all storage backends are
connected via the network, these I/O operations are
slow. By starting more threads than cores, we can hide
the I/O operations. While a thread waits for data, an-
other one can use the core for computation. However,
with 16 or more threads, the management overhead
dominates the benefit, so the overall run time is nega-
tively affected. 8 threads are a good trade off between
management overhead and hiding I/O latency. We
will use this number for the following experiments.
Besides parallelization through multiple threads,
we also use multiple VMs simultaneously. Figure 6
visualizes the run time for different numbers of VMs.
While one VM requires 351 minutes (this is the opti-
mum in Figure 5), additional VMs can further reduce
the run time. The process scales almost linearly with
up to 3 VMs but then starts to get slower the more
VMs are added. From about 10 VMs on, no consider-
able improvement can be observed.
Until now, all experiments used a single GlusterFS
server as storage backend. It is reasonable that this
storage becomes a bottleneck and increasing the num-
ber of VMs will not add any value. In Section 4.4, we
will therefore examine the storage backend in more
detail.
4.3 Batch Size
Our approach of an automatic varying of the batch
size aims to maximize the number of parallel working
1 2 3 4
5 6
7 8 9 10 11 12 13 14
15 16
0
100
200
300
400
351
183
134
107
96
89
81
80
75
74
71 71
72
69 69
67
VMs
Run time in minutes
Figure 6: Run time with one GlusterFS server and 8 threads.
Red line marks linear scaling.
VMs. The VMs are created at run time. After a VM
is created, idling should be avoided and the communi-
cation overhead for batch distribution should be mini-
mized. Figure 7a visualizes how many of the 16 avail-
able VMs are created and running through the entire
triangulation process. Each color encodes a level of
detail, starting with the finest one in yellow.
The workflow starts with a single VM for the Cre-
ate Layers File and Generate Keys task. When the
triangulation of the batches starts, more VMs are cre-
ated. It takes about 13 minutes to start all 16 VMs.
When calculating LOD 17 (yellow), 16 (blue) and
15 (red) all VMs are working almost continuously.
In the coarser LODs the number of parallel work-
ing VMs is lower. In these levels, fewer tiles have to
be computed and it is no longer possible to generate
many long-running batches like in the first LODs. As
mentioned in Section 3.2 the minimum batch size is a
trade off. If it is too small, the communication over-
head increases due to more scheduling effort. If it is
too large, there are not enough batches for all VMs.
In the last levels one of the problems always exists.
However, this applies only to a fraction of the total
(a) Our adaptive batch size. (b) Batch size 1 000. (c) Batch size 100 000.
Figure 7: Parallel running, i.e. non-idling VMs with 1 GlusterFS server, 8 threads and a maximum of 16 VMs. Color encodes
level of detail. (LOD 17 in yellow, LOD 16 in blue etc.) Brown bars encode another service than triangulate.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
46
processing time. Most of the time is needed for the
first levels, that can be efficiently calculated by the
adaptive batch size.
We compared our approach to a fixed batch size
of one thousand (Figure 7b) and 100 000 (Figure 7c).
One thousand tiles in a batch are too few. The VMs
are almost continuously utilized (similar to our ap-
proach), but the total run time is considerably higher
because of increased communication overhead. A
batch size of 100 000, on the other hand, is too large.
At the end of LOD 17 (yellow) there are not enough
batches left to keep all VMs busy. Starting with
LOD 16 (blue), some VMs are even idle from the be-
ginning. There are too few tiles to create such large
batches for all VMs. This again leads to a longer total
run time.
4.4 I/O Overhead
The GeoTiffs as well as the generated quantized mesh
files have to be stored somewhere. In the previous
sections, a single GlusterFS server was used for this
purpose. In Section 4.2, we assumed that increasing
the number of VMs does not improve performance
because the storage backend is the bottleneck. This
assumption is supported when looking at the CPU
load of the GlusterFS instance (Figure 8). It reaches
an upper bound of almost 90% for more than 10 VMs.
This indicates that the one GlusterFS server is not able
to provide more than 10 VMs with data.
In this section, we examine the impact of addi-
tional GluserFS servers on the overall run time. To
provide better comparability of our work, we also re-
placed GlusterFS with AWS S3, as well as with a pri-
vate object storage.
1 2 3 4
5 6
7 8 9 10 11 12 13 14
15 16
40
60
80
100
VMs
Average CPU utilization
Figure 8: Average CPU utilization of the single GlusterFS
server during triangulation with varying number of VMs
and 8 threads each.
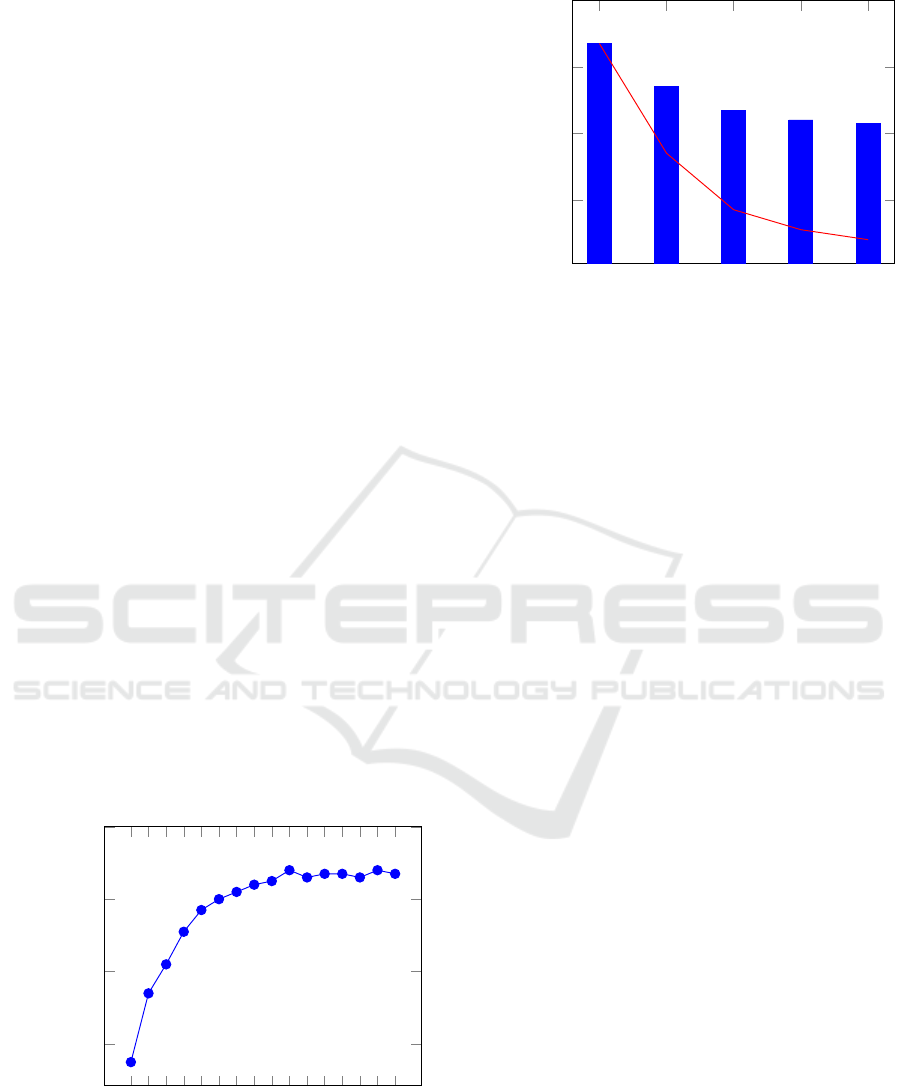
1 2 4 6 8
20
40
60
80
67
54
47
44
43
GlusterFS server
Run time in minutes
Figure 9: Run time with 16 VMs, 8 threads and a varying
amount of GlusterFS servers. Red line marks linear scaling.
GlusterFS Servers
In the previous experiments, we fixed the number of
GlusterFS servers to 1. Now we add more GlusterFS
server in the distributed volume mode. In this way
a file is stored on just one server without replication.
Due to their random distribution, each server has a
similar workload during the calculation.
We calculated the LODs again with 16 VMs and
8 threads each, but varied the number of GlusterFS
servers (Figure 9). As expected, more GlusterFS
servers reduce run time. However, the speedup is sig-
nificantly less than it was for more threads or VMs.
The difference to a linear scaling is already clearly
visible when switching from one to two GlusterFS
servers. Nevertheless, the run time can be improved
by another 35% with 8 GlusterFS servers compared
to just one.
AWS S3
To assure compatibility of our results, we run the
same experiment (16 VMs, 8 threads) with Amazon
AWS S3 instead of GlusterFS. The run time is 184
minutes and therefore much slower than with one
GlusterFS server (67 minutes). While S3 itself pro-
vides fast storage access, the latency is higher due
to the higher physical distance between the servers.
In addition, the large number of small files results in
many read and write operations. These are charged
by AWS, leading to higher operating costs.
Private Object Store
We repeat the same experiment with a private object
store. It uses the same access protocol than AWS S3
but the servers are closer to our cluster. This improves
Preprocessing of Terrain Data in the Cloud using a Workflow Management System
47

the run time from 184 minutes (AWS S3) to 108 min-
utes an confirms the great influence of I/O latency.
5 COMPARISON WITH
PREVIOUS WORK
In our previous work we performed the same task
on the same data set but used GeoTrellis on top of
Apache Spark instead of a workflow management
system (Kr
¨
amer et al., 2020). As mentioned above,
this approach had the advantage of being easy to set
up. However, the frameworks limited us and led to
undesired behavior such as resampling of input data
and many shuffle operations during processing. With
our new approach we want to circumvent this and in-
crease the performance considerably.
In our previous work we had 16 GlusterFS servers
with 2 cores and 8 GB of RAM. On these instances,
the LODs were calculated as well. This differs from
our new approach, where the instances for calculating
are separated from those for storing the data.
Our total run time with the old approach is
79 hours when using 16 instances for GlusterFS in-
cluding one for calculating the LODs. The new ap-
proach needs less than 6 hours with a single GlusterFS
instance combined with one for calculation. This is a
huge improvement of factor 13 even considering that
we now used 4 cores instead of 2. Our best run time
in the old approach used 15 calculating VMs and took
354 minutes. The new approach is 5 times faster with
67 minutes. If we add five more GlusterFS servers we
can even reduce the run time to 44 minutes.
These measurements confirm that our new ap-
proach brings significant performance improvements.
It is superior to the old approach and demonstrates
that workflow management systems are a powerful
basis for the processing of terrain data.
6 CONCLUSION
In this paper, we computed the LODs for a terrain
model using a scientific workflow. During calcula-
tion we used the results from a more accurate LOD to
speed up the computations of the next coarser LOD.
Since we used already generated data, we did not need
an additional data structure. This saved I/O operations
and sped up calculation.
However, we store each resulting tile as an indi-
vidual file. For the data set used, this is about 2.5 mil-
lion files with a few kilobytes each. In a future work
we want to combine all tiles of a batch in one large
file. This would reduce the number of I/O operations
and speed up calculation further. In addition, the costs
of AWS S3 are calculated based on the number of data
accesses. Reducing the number of files reduces oper-
ating costs when using AWS S3 as a storage backend.
The drawback of this solution is that the byte ranges
of the individual tiles must be captured. If a tile is
read, only these bytes have to be returned from the
larger file. Nevertheless, this is a promising approach
that should be investigated in future work.
In our approach, the WMS starts VMs for the cal-
culations. This provides a lot of flexibility, but we
have to wait a few minutes before newly started VMs
are ready. In the future, we want to explore the possi-
bilities of serverless computing. Instead of launching
VMs, the WMS could run containers directly through
the cloud provider. In this way, the infrastructure
would be further simplified and new types of orches-
tration would be possible.
Our main contribution in this paper is the prepara-
tion of terrain data using a scientific workflow. For
this purpose, we introduced an adaptive batch size
that bundles several tiles in one batch. The dynamic
size of these batches enables the workflow manage-
ment system to consistently utilize all available VMs,
minimizing their idle time and speed up the calcula-
tion.
Our evaluation shows that our approach scales
well when computation power is added. With
16 VMs, we can prepare the entire test data set in
just over an hour, while it takes almost six hours on
a single instance. This is significantly faster than our
previous work, where we needed 15 VMs to process
the data set in under six hours.
With our new approach, even large data sets can
be prepared for visualization efficiently. The required
VMs are started on demand and are continuously used
afterwards. This leads to fast results and low operat-
ing costs at the same time.
REFERENCES
Agarwal, D. (2012). Crayons : An Azure Cloud based
Parallel Sy stem for GIS Overlay Operations. page
1048200.
Alonso, G. and Hagen, C. (1997). Geo-opera: Work-
flow concepts for spatial processes. In International
Symposium on Spatial Databases, pages 238–258.
Springer.
Amazon Web Services, Inc. (2021). Amazon simple stor-
age service s3 – cloud online-speicher. https://aws.
amazon.com/de/s3/. accessed 08-Dec-2021.
Apache Software Foundation (2021). Apache hadoop.
https://hadoop.apache.org/. accessed 09-Aug-2021.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
48

Azavea Inc. (2021). Geotrellis. https://geotrellis.io/. ac-
cessed 09-Aug-2021.
Beisken, S., Meinl, T., Wiswedel, B., de Figueiredo, L. F.,
Berthold, M., and Steinbeck, C. (2013). Knime-cdk:
Workflow-driven cheminformatics. BMC bioinfor-
matics, 14(1):1–4.
Berriman, G. B., Deelman, E., Good, J. C., Jacob, J. C.,
Katz, D. S., Kesselman, C., Laity, A. C., Prince, T. A.,
Singh, G., and Su, M.-H. (2004). Montage: a grid-
enabled engine for delivering custom science-grade
mosaics on demand. In Optimizing scientific return
for astronomy through information technologies, vol-
ume 5493, pages 221–232. SPIE.
Cesium GS, Inc. (2022). Cesium: The platform for 3d
geospatial. https://cesium.com. accessed 03-Feb-
2022.
CesiumGS (2020). Geotiffquantized-mesh. https://github.
com/CesiumGS/quantized-mesh. accessed 28-Sep-
2021.
Crawl, D., Block, J., Lin, K., and Altintas, I. (2017).
Firemap: A dynamic data-driven predictive wildfire
modeling and visualization environment. Procedia
Computer Science, 108:2230–2239.
Cui, D., Wu, Y., and Zhang, Q. (2010). Massive spatial data
processing model based on cloud computing model.
3rd International Joint Conference on Computational
Sciences and Optimization, CSO 2010: Theoretical
Development and Engineering Practice, 2:347–350.
De Berg, M., Cheong, O., Van Kreveld, M., and Overmars,
M. (2008). Computational geometry: Algorithms and
applications. Computational geometry: algorithms
and applications, pages 1–17.
Dean, J. and Ghemawat, S. (2008). Mapreduce: Simpli-
fied data processing on large clusters. Commun. ACM,
51(1):107–113.
Delaunay, B. et al. (1934). Sur la sphere vide. Izv. Akad.
Nauk SSSR, Otdelenie Matematicheskii i Estestven-
nyka Nauk, 7(793-800):1–2.
Du, Y. and Cheng, P. (2017). Lwgeowfms: A lightweight
geo-workflow management system. In IOP Confer-
ence Series: Earth and Environmental Science, vol-
ume 59, page 012070. IOP Publishing.
Giachetta, R. (2015). A framework for processing large
scale geospatial and remote sensing data in MapRe-
duce environment. Computers and Graphics (Perga-
mon), 49:37–46.
Hegeman, J. W., Sardeshmukh, V. B., Sugumaran, R., and
Armstrong, M. P. (2014). Distributed LiDAR data pro-
cessing in a high-memory cloud-computing environ-
ment. Annals of GIS, 20(4):255–264.
Hessisches Landesamt f
¨
ur Bodenmanagement und Geoin-
formation (2021). Hessian geodata portal: Geodaten
online. https://www.gds.hessen.de. accessed 08-Dec-
2021.
Hughes, J. N., Annex, A., Eichelberger, C. N., Fox, A.,
Hulbert, A., and Ronquest, M. (2015). GeoMesa:
a distributed architecture for spatio-temporal fusion.
In Pellechia, M. F., Palaniappan, K., Doucette, P. J.,
Dockstader, S. L., Seetharaman, G., and Deignan,
P. B., editors, Geospatial Informatics, Fusion, and
Motion Video Analytics V, volume 9473, pages 128
– 140. International Society for Optics and Photonics,
SPIE.
Kr
¨
amer, M. (2021). Efficient scheduling of scientific work-
flow actions in the cloud based on required capabil-
ities. In Hammoudi, S., Quix, C., and Bernardino,
J., editors, Data Management Technologies and Ap-
plications, pages 32–55, Cham. Springer International
Publishing.
Kr
¨
amer, M., Gutbell, R., W
¨
urz, H. M., and Weil, J. (2020).
Scalable processing of massive geodata in the cloud:
generating a level-of-detail structure optimized for
web visualization. AGILE: GIScience Series, pages
1–20.
Kr
¨
amer, M., W
¨
urz, H. M., and Altenhofen, C. (2021). Ex-
ecuting cyclic scientific workflows in the cloud. Jour-
nal of Cloud Computing, 10(1):1–26.
Larsonneur, E., Mercier, J., Wiart, N., Floch, E., Del-
homme, O., and Meyer, V. (2018). Evaluating work-
flow management systems: A bioinformatics use case.
pages 2773–2775.
Maptools.org (2020). Geotiff. http://geotiff.maptools.org/
spec/contents.html. accessed 28-Sep-2021.
Medeiros, C. B., Vossen, G., and Weske, M. (1996). Geo-
wasa-combining gis technology with workflow man-
agement. In Proceedings of the Seventh Israeli Con-
ference on Computer Systems and Software Engineer-
ing, pages 129–139. IEEE.
Oinn, T., Greenwood, M., Addis, M., Alpdemir, M. N.,
Ferris, J., Glover, K., Goble, C., Goderis, A., Hull,
D., Marvin, D., Li, P., Lord, P., Pocock, M. R., Sen-
ger, M., Stevens, R., Wipat, A., and Wroe, C. (2006).
Taverna: lessons in creating a workflow environment
for the life sciences. Concurrency and Computation:
Practice and Experience, 18(10):1067–1100.
Open Source Geospatial Foundation (2012). Tile map ser-
vice specification. https://wiki.osgeo.org/wiki/Tile
Map Service Specification. accessed 08-Dec-2021.
Red Hat Inc. (2019). Gluster. https://gluster.org. accessed
28-Sep-2021.
Sefraoui, O., Aissaoui, M., and Eleuldj, M. (2012). Open-
stack: toward an open-source solution for cloud com-
puting. International Journal of Computer Applica-
tions, 55(3):38–42.
Wang, Y., Liu, Z., Liao, H., and Li, C. (2015). Improving
the performance of GIS polygon overlay computation
with MapReduce for spatial big data processing. Clus-
ter Computing, 18(2):507–516.
Zaharia, M., Chowdhury, M., Franklin, M. J., Shenker, S.,
Stoica, I., et al. (2010). Spark: Cluster computing with
working sets. HotCloud, 10(10-10):95.
Zhong, Y., Han, J., Zhang, T., and Fang, J. (2012). A
distributed geospatial data storage and processing
framework for large-scale WebGIS. Proceedings -
2012 20th International Conference on Geoinformat-
ics, Geoinformatics 2012, (20).
Preprocessing of Terrain Data in the Cloud using a Workflow Management System
49
