
Importance Order Ranking for Texture Extraction:
A More Efficient Pooling Operator Than Max Pooling?
S. Vargas Ibarra
a
, V. Vigneron
b
, J.-Ph. Conge
c
and H. Maaref
d
Univ. Evry, Universit
´
e Paris-Saclay, IBISC EA 4526, Evry, France
{vincent.vigneron, hichem.maaref, sofia.vargasibarra, jean-philippe.conge}@univ-evry.fr
Keywords:
Deep Learning, Pooling Function, Rank Aggregation, LBP, Segmentation, Contour Extraction.
Abstract:
Much of convolutional neural network (CNN)’s success lies in translation invariance. The other part resides
in the fact that thanks to a judicious choice of architecture, the network is able to make decisions taking into
account the whole image. This work provides an alternative way to extend the pooling function, we named
rank-order pooling, capable of extracting texture descriptors from images. The rank-order pooling layers are
non parametric, independent of the geometric arrangement or sizes of the image regions, and can therefore
better tolerate rotations. Rank-order pooling functions produce images capable of emphasizing low/high fre-
quencies, contours, etc. We shows rank-order pooling leads to CNN models which can optimally exploit
information from their receptive field.
1 INTRODUCTION
Convolutional neural network (CNN) architecture is
augmented by multi-resolution (pyramidal) structures
which come from the idea that the network needs to
see different levels of (resolutions) to produce good
results. A CNN stacks four different processing lay-
ers: convolution, pooling, ReLU and fully-connected
(Goodfellow et al., 2016).
Placed between two convolutional layers, the
pooling layer receives several input feature maps.
Pooling (i) reduces the number of parameters in the
model (subsampling) and computations in the net-
work while preserving their important characteristics
(ii) improves the efficiency of the network (iii) avoids
over-learning.
Thus, the pooling layer makes the network less
sensitive to the position of features: the fact that an
object is a little higher or lower, or even that it has a
slightly different orientation should not cause a radi-
cal change in the classification of the image.
The max-pooling function, for example, down-
samples the input representation (image, hidden layer
output matrix, etc.), reducing its dimensionality.
Weaknesses of pooling functions are well iden-
tified (Yu et al., 2014): (i) they do not preserve all
a
https://orcid.org/0000-0003-3102-4315
b
https://orcid.org/0000-0001-5917-6041
c
https://orcid.org/0000-0002-8641-0312
d
https://orcid.org/0000-0002-1192-7333
spatial information (ii) the maximum chosen by the
max-pooling in the pixel grid is not the true maximum
(iii) average pooling assumes a single mode with a
single centro
¨
ıd. The question is how (optimally) to
take into account the characteristics of the (input im-
age) regions being pooled into the pooling operation?
Part of the answer lies in the work of Lazebnik’s who
demonstrated the importance of the spatial structure
of pooling neighborhoods (Lazebnik et al., 2006): in-
deed, local spatial variations of image pixel intensities
(called textures in popular image processing) char-
acterize an “organized area phenomenon” (Haralick,
1979) which cannot be captured in pooling layers.
This paper proposes a new pooling operation, in-
dependent of the geometric arrangement or sizes of
image regions, and can therefore better tolerate ro-
tations. It is based on the Savage definition of rank
order (Savage, 1956) and also simple to implement.
Notations
Throughout this paper small Latin letters a,b,. .. rep-
resent integers. Small bold letters a, b are put for
vectors and capital letters A,B for matrices or ten-
sor depending of the context. The dot product be-
tween two vectors is denoted < a,b >. We denote by
∥a∥ =
√
< a,a >, the ℓ
2
norm of a vector. X
1
,. .. ,X
n
are non ordered variates, x
1
,. .. ,x
n
non ordered ob-
servations. ”Ordered statistics” means either p
(1)
≤
.. . ≤ p
(n)
(ordered variates) and p
(1)
≤.. . ≤ p
(n)
(or-
dered observations). The extreme order statistics are
Ibarra, S., Vigneron, V., Conge, J. and Maaref, H.
Importance Order Ranking for Texture Extraction: A More Efficient Pooling Operator Than Max Pooling?.
DOI: 10.5220/0011142200003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 585-594
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
585
example
121 201 200
190 100 164
78 77 65
→
thresholded
1 1 1
1 1
0 0 0
→
LBP weights
1 2 4
128 8
64 32 16
Pattern (10001111)
2
LBP 128+8+4+2+1 = 143
Figure 1: Example of 3×3 image neighborhood (P = 8 and R = 1).
p
(1)
= min{x
1
,x
2
.. ., x
n
}, p
(n)
= max{x
1
,x
2
,. .. ,x
n
}.
The sample range is p
(n)
− p
(1)
. The p
(i)
are neces-
sarily dependent because of the inequality relations
among them.
Definition 1 (Savage (Savage, 1956)). The rank order
corresponding to the n distinct numbers x
1
,. .. ,x
n
is
the vector r = (r
1
,. .. ,r
n
)
T
where r
i
is the number of
x
j
’s≤ x
i
and i ̸= j.
The rank order r is always unambiguously defined
as a permutation of the first n integers.
2 TEXTURE CODING
Most of image descriptors that encode local patterns
e.g. local binary patterns (LBP) (and its variants)
(Pietikinen et al., 2011; Ojala et al., 1996) depend on
(i) the size of the neighborhood (ii) the reading order
of the neighbors (iii) and the mathematical function
used to calculate the characteristic distance between
neighboring pixels. The new pixel value L
P,R
in the
image is an integer in the range of 0 to 255 (for a 8-bit
encoding) given by:
L
R
(P) =
P−1
∑
p=0
2
p
·t(g
p
−g
c
),with t(x) =
(
1 if x ≥ 0
0 otherwise
,
(1)
where P counts the number of pixels in the neighbor-
hood (not including the central pixel), considering the
distance R between central pixel g
c
and the neighbor-
ing pixels {g
p
|p = 0,...,P −1}. In Eq. 1, LBP com-
putes a pixel value from a 8 −bit string from the 3×3
neighborhood by computing the Heaviside function
t(·) of the difference between the neighboring pixels
and the central pixel, (g
i
−g
c
) (see Fig. 1).
LBP-like texture descriptors have evolved into al-
most all areas of computer vision, because of their
robustness to monotonic gray-scale changes, illumi-
nation invariance and computational simplicity. In-
variance w.r.t. any monotone transformation of the
gray scale is obtained by considering in (1) the signs
of the differences t(g
i
−g
c
),i = 0,...,P −1. But the
independence of g
c
and {|g
0
−g
c
|,. .. ,|g
P−1
−g
c
|}
is not guaranteed in practice. Moreover, under cer-
tain circumstances, LBP misses the local structure
as it does not consider the central pixel. The bi-
nary data produced by these descriptors are sensi-
tive to noise mainly in uniform regions although (Tan
and Triggs, 2007) have proposed a ternary encoding
g ∈ {−1, 0,1} to reduce this noise sensitivity.
In the next section, an algorithm is proposed to
generate rank-order importance (ROI) image which
could be used in contour detection, segmentation or
image quantization.
3 RANK ORDER STATISTICAL
MODEL
Let A = {a
1
,a
2
,. .. ,a
n
} be a set of alternatives, can-
didates, etc. with cardinality |A|= n and let V be a set
of voters, with |V | = m.
Each voter/judge k is assumed to have a
weak order or ranking r
(k)
of the alternatives
a
1
,a
2
,. .. ,a
n
represented by a vector of integers r
(k)
=
(r
(k)
1
,r
(k)
2
,. .. ,r
(k)
n
)
T
, where r
(k)
1
,r
(k)
2
,. .. represent the
rank of the alternatives.
The data are collected in a (n×m) table R = {r
(k)
i
}
(see Figure 2.a). R represents either the ranking of the
n candidates assigned by the m voters as a total order,
i.e. r
(k)
i
̸= r
(k)
i
′
, ∀i
′
̸= i (Br
¨
uggemann and Patil, 2011),
either the ranking of the n candidates in the form such
that a voter can give ex-aequo positions.
For ease of writing, in the following, r
ik
= r
(k)
i
.
The rank-aggregation problem consists in finding
a order ranking r
∗
given by a virtual judge minimi-
zing the disagreement of the m judges’opinions,i.e.
r
∗
= argmin
r
m
∑
k=1
d(r,r
(k)
), s.t. r ∈ S
n
, (2)
where S
n
is the symmetric group of the n! permuta-
tions (Benson, 2016) and the metric d : S
n
×S
n
→R
+
is a distance function chosen a priori.
Eq. (2) defines a nonlinear optimization program
whose solution r
∗
is the distribution of ranks that
could have been attributed to these n candidates by
a virtual voter V resuming the points of view of the
m voters (Yadav and Kumar, 2015). One could also
stand the dual problem of the previous one, i.e. : is
there a distribution of ratings/values that could have
been attributed by the m voters to a virtual alternatives
a?
The first problem is linked to the idea of aggregat-
ing of points of view, the second to the idea of sum-
marizing behaviors.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
586
v
(1)
, v
(2)
, ... , v
(k)
... , v
(m)
a
1
a
2
... a
j
... a
n
r
ik
(a) Total-order ranking matrix.
(b) Permutation matrix for criterion k ∈{1,.. . ,m}.
P
(k)
=
a
1
a
2
.
.
.
a
i
.
.
.
a
n
R =
a
1
a
2
.
.
.
a
i
.
.
.
a
n
p
(k)
i j
Figure 2: Matrices used with disagreement distance resolution.
3.1 Explicit Resolution
The optimization problem consists to find a consen-
sus distribution of ranks r given by an unknown vir-
tual voter v minimizing the discordance of opinions
between the m voters, minimizing
m
∑
k=1
d(r,r
(k)
). (3)
The result will be a permutation from S
n
. The dis-
tance d(r
(k)
,r
(k
′
)
) between the ranking of voter k and
the ranking of voter k
′
can be chosen for instance as
the disagreement distance
∑
n
i=1
sgn|r
ik
−r
ik
′
|, the dis-
tance of rank absolute deviation
∑
n
i=1
|r
ik
−r
ik
′
|, the
Euclidean distance between the ranks
∑
n
i=1
(r
ik
−r
ik
′
)
2
or the Condorcet distance
∑
i
∑
j
|p
(k)
i j
− p
(k
′
)
i j
| (Fig.
2.b), with p
(k)
i j
=
i< j
where denotes the indica-
tor matrix for which p
(k)
i j
= 1 if the rank of the al-
ternative a
i
is less than the alternative a
j
and 0 oth-
erwise (Gehrlein and Lepelley, 2011). The choice of
these metrics are motivated by a range of properties:
(a) they have an intuitive and plausible interpretation
as a number of pairwise choices. They provide the
best possible description of the process of ranking
items as performed by a human (b) their high rele-
vance due to their widespread use (c) they count rather
than measure (d) provide very good concordance in-
dicator. (Vigneron and Tomazeli Duarte, 2018) pro-
posed an explicit resolution method with linear pro-
gramming.
3.2 Euclidean Distance (Spearman
Distance)
When looking for the optimal consensus r
∗
of m
voters who attributed the votes r
(1)
,r
(2)
,. .. ,r
(m)
to
the n candidates {a
1
,a
2
,. .. ,a
n
}, we minimize the
Euclidean distance defined by
∑
m
k=1
∑
n
i=1
(r
∗
i
−r
ik
)
2
,
where r
i
denotes the rank of the ith candidate. Note
that r ∈S
n
, with S
n
the symmetric group of the n! per-
mutations (Diaconis, 1988). Hence the constraint r
∗
∈
S
n
. The permutation r can be represented for a voter
k by a permutation matrix P
(k)
= {p
(k)
i j
}
n
i, j=1
, p
(k)
i j
∈
{0,1}, with p
(k)
i j
= 1 if the candidate i is positioned in
place j for the k−th voter as pictured in Figure 2.b.
Hence we can rewrite the constraint r
∗
∈ S
n
as
n
∑
j=1
p
i j
=
n
∑
i=1
p
i j
= 1,∀i, j (4)
Example 1 (Condorcet Rank-order Coding). For in-
stance, the 4th column of matrix R below becomes
matrix P
(4)
:
R =
5
3
2
4
1
−→P
(4)
=
0 0 0 0 1
0 0 1 0 0
0 1 0 0 0
0 0 0 1 0
1 0 0 0 0
We will show that replacing r with the matrix P
leads to an optimization function linear in p
i j
which
can be set as follows:
min
r
∑
i j
∑
k
c
(k)
i j
p
i j
!
, s.t.
n
∑
j=1
p
i j
=
n
∑
i=1
p
i j
= 1,∀i, j,
(5)
where
∑
k
c
(k)
i j
corresponds to the affectation cost of the
candidate i in place j for all the voters; a cost which
Importance Order Ranking for Texture Extraction: A More Efficient Pooling Operator Than Max Pooling?
587

depends of the metric and that is calculated in the fol-
lowing.
As r
∗
i
=
∑
n
j=1
jp
i j
, the Euclidean function be-
comes
m
∑
k=1
n
∑
i=1
(
n
∑
j=1
jp
i j
−r
ik
)
2
=
m
∑
k=1
n
∑
i=1
(
n
∑
j=1
( j −r
ik
)
2
p
i j
). (6)
Hence the minimization problem is equivalent to:
min
P
n
∑
i=1
n
∑
j=1
φ
i j
p
i j
!
s.t. φ
i j
=
n
∑
j=1
( j −r
ik
)
2
, (7)
n
∑
i=1
p
i j
=
n
∑
j=1
p
i j
= 1, and p
i j
∈ {0,1}, (8)
where φ
i j
is the cost of attribution alternative a
i
in
position j.
If the r
k
are total orders in Eq. (7), Eq. 6 can be
simplified in:
m
∑
k=1
n
∑
i=1
(r
2
i
−2r
i
r
ik
+ r
2
ik
) =
m
∑
k=1
n
∑
i=1
(r
2
i
+ r
2
ik
)
| {z }
2p× sum of n first
integers
−
n
∑
i=1
(r
i
m
∑
k=1
r
ik
).
(9)
As
∑
n
j=1
r
ik
= pr
i·
, where r
i·
is the mean rank of the
alternative i on the m rankings and as r
i
=
∑
j
jp
i j
, Eq.
(9) becomes
2p
n(n + 1)(2n + 1)
6
−2p
n
∑
i=1
n
∑
j=1
jr
i·
p
i j
. (10)
Minimize rank Spearman distance remains to maxi-
mize the term
∑
n
i=1
∑
n
j=1
jr
i·
p
i j
under the usual con-
straints of P
(k)
being a permutation matrix. Finding
the optimal permutation p
∗
i j
consists to affect to the
alternative a
i
to the rank j the nearest as possible to
r
i·
in the Euclidean sense.
3.3 Rank Absolute Deviation Distance
The problem of finding the virtual voter in the case
of the rank absolute deviation distance
∑
n
i=1
|r
ik
−r
ik
′
|
can be posed as the optimization problem
min
r
∗
∈S
n
m
∑
k=1
n
∑
i=1
|r
∗
i
−r
ik
|
!
, (11)
with the notations r
∗
i
=
∑
n
j=1
jp
i j
, under the con-
straints
∑
n
j=1
p
i j
= 1, p
i j
∈ {0,1}. The absolute
value in Eq. 11 can be rewriten as
n
∑
j=1
jp
i j
−r
ik
=
∑
n
j=1
( j −r
ik
)p
i j
=
∑
n
j=1
|
j −r
ik
|
p
i j
. (12)
If we note φ
i j
=
∑
n
j=1
|
j −r
ik
|
the attribution cost
of alternative a
i
in position j, the minimization of the
consensus function for r
∗
∈ S
n
consists to solve the
following linear program
min
P
n
∑
i=1
n
∑
j=1
φ
i j
p
i j
!
s.t. φ
i j
=
n
∑
j=1
|
j −r
ik
|
, (13)
n
∑
i=1
p
i j
=
n
∑
j=1
p
i j
= 1, and p
i j
∈ {0,1}. (14)
4 RANK-ORDER IMPORTANCE
COMPONENTS
4.1 Importance Ranking
Several strategies have been proposed in the literature
to extract important variables or develop parsimo-
nious models and deal with the dimensionality. The
dimension of observed data geing generally higher
than their intrinsic dimension, it is theoretically pos-
sible to reduce the dimension without loosing infor-
mation.
Among the unsupervised tools, principal compo-
nent analysis (PCA) or factor analysis (FA) are cer-
tainly the most used techniques to optimize the under-
standing insight into of a data set. They aim to project
the data onto a lower dimensional subspace in which
axes are constructed either by maximizing the vari-
ance of the projected data or by explaining the overall
covariance structure.
PCA and FA are both linear tools. This means that
nonlinear dependencies are not taken into account.
The question is simply: can we extract a set of the
most decorrelated rank-order variables to each other
capable of capturing distinct information? The overall
framework for this objective suggests a rank-order de-
composition. The principle remains remarkably sim-
ple: it consists into a re-distributive effect of the rank
variables – similar to PCA – on a Hilbert space by
linear programming.
Lemma 1 (Vigneron and Duarte (Vigneron and
Duarte, 2017)). Consider a collection of rank-orders
R = {r
1
,r
2
,. .. ,r
m
} (data). It is always possible to
extract a total rank-order component g
ℓ
with a mini-
mal distance to the data {r
1
,r
2
,. .. ,r
m
} and simulta-
neously with the maximal distance to the collection of
previously calculated ranks {g
1
,. .. ,g
ℓ−1
}.
At stage ℓ, the search of the ℓth total order g
ℓ
is
represented by the n ×ℓ matrix Z
(ℓ)
= {z
1
,. .. ,z
ℓ
}. In
the case of the rank absolute deviation distance (de-
veloped in section 3.3) the rank-order decomposition
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
588

reduced to solve the following linear program
max
Z
(ℓ)
n
∑
i=1
n
∑
j=1
φ
i j
z
(ℓ)
i j
−
n
∑
i=1
n
∑
j=1
β
i j
z
(ℓ)
i j
!
s.t. z
ii
= 0, z
(ℓ)
i j
+ z
(ℓ)
ji
−z
(ℓ)
ik
≤ 1,i ̸= j ̸= k,
z
(ℓ)
i j
∈ {0,1}. (15)
where
φ
i j
=
n
∑
j=1
|
j −r
ik
|
, (16)
and
β
i j
=
ℓ−1
∑
k=1
z
(k)
i j
, z
(ℓ)
i j
+ z
(ℓ)
ji
= 1,i < j,
Algorithm 1 stops when ℓ = m and pro-
vide {g
1
,. .. ,g
m
} rank-order vectors such that g
ℓ
is the most decorrelated to the previous ranks
{g
1
,. .. ,g
ℓ−1
}. Until now, on the contrary to PCA,
there is no index capable of indicating the quantity of
information captured by each vector g
ℓ
.
In the algorithm 1, LP is put for the optimal reso-
lution of the linear program Eq. 15.
Algorithm 1: Rank-order decomposition Algorithm.
Require: P
(1)
,. .. ,P
(m)
← {r
1
,r
2
,. .. ,r
m
}
{Permutation matrices P
(k)
= {p
(k)
i j
}}∨ stack
A =
/
0 {contain the re-ranked components}
Ensure: {g
1
,. .. ,g
m
} {Postcondition}
1: for ℓ = 1 to m do
2: Compute φ
i j
=
∑
n
j=1
|
j −r
ik
|
,
3: Compute β
i j
=
∑
ℓ−1
k=1
z
(k)
i j
4: Ψ = {φ
i j
},B = {β
i j
}
5: LP(Ψ,B, Z
(ℓ)
) under constraints (15) {solve
linear program}
6: g
ℓ
← z
ℓ
7: end for
8: return {g
1
,g
2
,. .. ,g
m
}
4.2 Experimental Setup
Example 2 (Top 10 French Companies CAC 40). The
composition of the CAC 40 index is based on the rank-
ing on the top 100 companies. By way of illustra-
tion, Table 1 shows the data matrix R = {r
(k)
i
} formed
with the ranking often company names are listed and
ranked according to 4 criteria: turnover induced by
innovation (TII), size (SIZ), level of capitalization on
the knowledge transferred (CAP), impact of R& D
collaborations (IMP) (Vigneron and Petit, 2008).
Table 3 shows two full order ranking consensus,
proposed by a virtual judge, minimising the disagree-
ments between the voters (criteria).
Table 1: Ten CAC 40 company rankings according to 4 cri-
teria:turnover induced by innovation (TII), size (SIZ), level
of capitalization on the knowledge transferred (CAP), im-
pact of R& D collaborations (IMP).
Company BOURSORAMA ranks
turnover size capital impact
TOTAL 1 4 3 10
LOREAL 2 2 1 2
SANOFI 3 1 2 1
LVMH 4 6 4 3
BNP PARIBAS 5 5 7 5
DANONE 6 3 6 4
AXA 7 8 5 6
VINCI 8 7 8 9
AIRBUS 9 10 10 8
ORANGE 10 9 9 7
Table 2: Left: Ten CAC 40 company rankings according to
4 criteria: innovation induced turnover, size, level of cap-
italization on transferred knowledge, impact of R& D col-
laborations. Right: The two proposed ranking using dis-
agreement and Condorcet distances.
Company aggregated ranks
Spearman (Eq. 7) rank abs. dev. (Eq. 13)
TOTAL 3 3
LOREAL 2 2
SANOFI 1 1
LVMH 4 4
BNP PARIBAS 5 6
DANONE 6 5
AXA 7 7
VINCI 8 8
AIRBUS 10 10
ORANGE 9 9
For instance, in the case of d
D
, the companies are
ranked this way: ➀ SANOFI ➁ LOREAL ➂ TOTAL ➃
LVMH ➄ BNP PARIBAS ➅ DANONE ➆ AXA ➇ VINCI
➈ ORANGE ➉ AIRBUS.
The 2 rankings are concordant except for items 5
and 6. Applying Algorithm 1 to table 1 gives the rank
decomposition proposed in table 3 in which the first
column is more important or explanatory that the sec-
ond one, itself more explanatory that the third, etc.
Table 3: Rank order of the 4 first principal components of
ten CAC-40 companies obtained using algorithm 1.
Company Rank-order decomposition
comp 1 comp 2 comp 3 comp4
TOTAL 4 5 6 5
LOREAL 1 3 1 4
SANOFI 2 2 2 2
LVMH 3 6 3 7
BNP PARIBAS 6 1 10 1
DANONE 5 4 7 3
AXA 7 7 5 9
VINCI 8 8 8 8
AIRBUS 10 9 9 6
ORANGE 9 10 4 10
Proof of orthogonality can be checked with pair-
wise Kendall’s rank correlation coefficients between
Importance Order Ranking for Texture Extraction: A More Efficient Pooling Operator Than Max Pooling?
589
the columns of table 3:
K
(2)
=
1.0 0.5556 0.5556 0.3333
1.0 0.1111 0.4478
1.0 −0.1111
1.0
all lower than the Kendall’s coefficients
1
of the rank
matrix in table 1:
K
(1)
=
1.0 0.6000 0.7333 0.3778
1.0 0.6889 0.5111
1.0 0.4667
1.0
The Kendall correlations τ
i j
between two columns
i and j will be high when observations have a similar
(or identical for a correlation of 1) rank (i.e. relative
position label of the observations within the variable:
1st, 2nd, 3rd, etc.) between the two variables, and low
when observations have a dissimilar (or fully different
for a correlation of -1) rank between the two variables.
So the CAC data were indeed reordered to be the
more uncorrelated as possible, as expected.
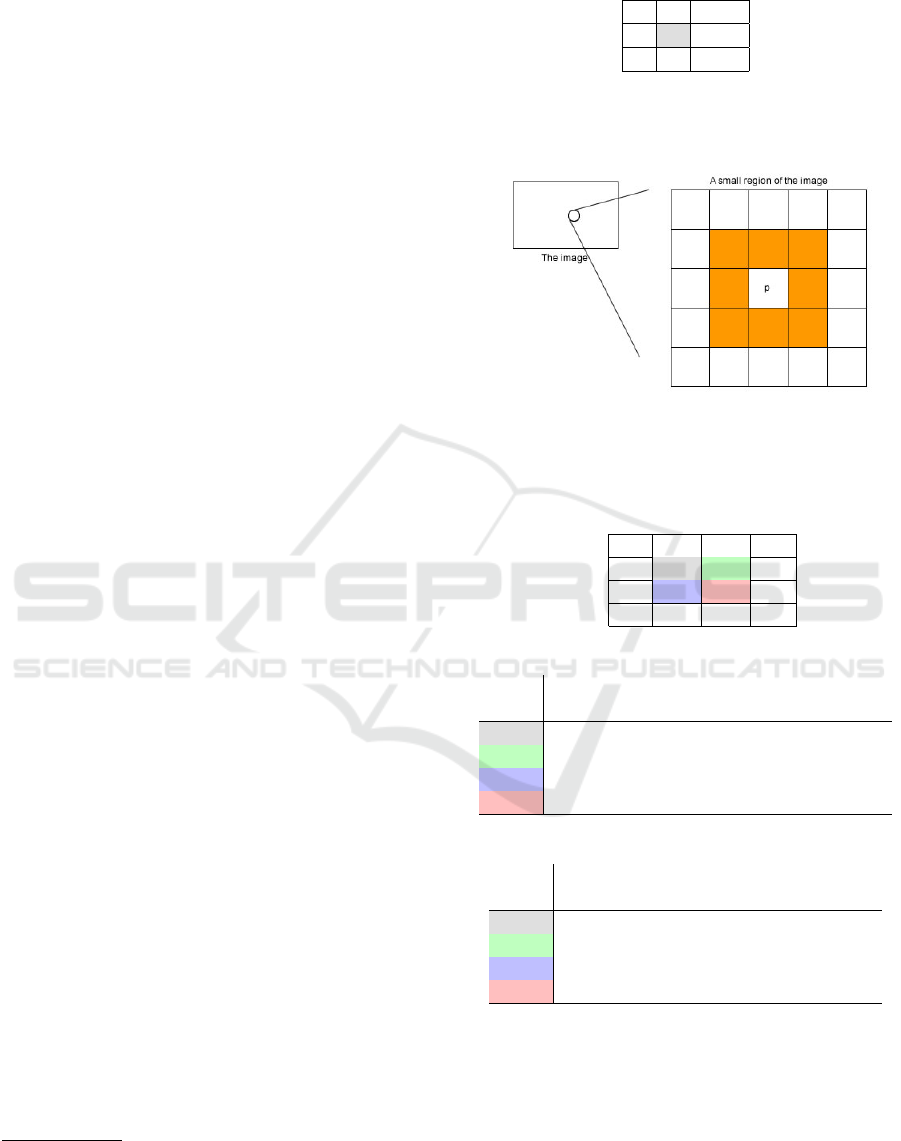
Example 3 (Application of ROI to Textured Image).
Consider now the neighborhood of a pixel ’p’ in a
image I, i.e. the set of pixels that touch it. The neigh-
borhood of a pixel can have a maximum of 8 pixels as
shown in Fig. 3a. The colored pixels in Fig. 3b are
8-connected to p.
For instance, the 4 ×4 image I in Fig. 3a. can be
decomposed using the 8-connectivity into the 16×8
matrix R = {r
1
,r
2
,. .. ,r
8
} (Fig. 3b where r
1
denotes
the column of pixel 1 (clock-wise ordering), r
2
de-
notes the column of pixel 2, and so on. The same
principle as for LBP is mimic, but with the transfor-
mation given in Eq. (15). The 8 neighbors around the
central pixel can be seen as ”voters” from whom we
expect a total rank-order.
The 8-connectivity matrix R is transformed into
ranks by simple ordering on which we can apply algo-
rithm 1. Concerning on peripheral pixels, the spatial
area is enlarged by adding borders of zeros. In gen-
eral, if our image is of size n ×n, and we examine a
neighborhood of f × f , then the size of the resulting
output is (n − f +1)×(n − f +1). With n = 4, f = 3,
indeed, this gives us a 2 ×2 output channel. For a
n ×n image, the encoding values are between 1 and
n
2
. The generalization to larger images is straightfor-
ward.
a question that might arise is how to choose the
ranks for the tied values? it was shown in (Vigneron
1
The Kendall’s coefficient is a statistic used to measure
the ordinal association between two measured quantities.
As the correlation coefficient value goes towards 0, the re-
lationship between the two variables will be weaker.
LBP weights
1 2 3
8 4
7 6 5
(a) Neighbor pix-
els ordering.
(b) The orange pixels form the neighborhood of the
pixel ’p’.
Figure 3.
1 2 3 4
1 4 8 20 18
2 17 12 17 17
3 6 1 17 17
4 4 6 5 14
(a) 4 ×4 image I.
center
pixel
r
0
r
1
r
2
r
3
r
4
r
5
r
6
r
7
12 4 8 20 17 17 1 6 17
17 8 20 18 17 17 17 1 6
1 17 12 17 17 5 6 4 6
17 12 17 17 17 14 5 6 1
(b) 8-connectivity matrix R.
center
pixel
r
0
r
1
r
2
r
3
r
4
r
5
r
6
r
7
12 1 1 4 1 4 1 3 4
17 1 4 3 2 3 4 1 3
1 4 2 2 3 1 3 2 2
17 3 3 1 4 2 2 4 1
(c) Rank matrix R.
Figure 4.
and Tomazeli Duarte, 2018) that the encoding is in-
sensitive to ties.
As an illustration LBP is applied to Lena’s origi-
nal picture 5a and provides the texture representation
given in Figure 5b. From the figure 5a, we obtained a
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
590

new decomposition (Figures 5c-5f). Visually, the 1st
plot is more informative than the 2nd one, which itself
is nore informative than the 3rd, and so on.
(a) Original (b) Classic LBP
(c) ROI comp. 1 (d) ROI comp. 2
(e) ROI comp. 3 (f) ROI comp. 8
Figure 5: Lena’ original (a) is compared to classic LBP rep-
resentation (b) and with the 1st, 2nd, 3rd and eighth rank-
order components obtained from Algorithm 1. The eighth
component is apparently the less informative component.
5 ROI-pooling OPERATOR
In CNNs maximum pooling operator is defined
mathematically for a volume V : A → R, A =
{(i
1
,i
2
,. .. ,i
N
)|i
k
∈ [1,...,n
k
],k ∈ [1, .. ., N]} and a
set B = {(i
1
,i
2
,. .. ,i
N−1
,0)|i
b
∈ [−K
b
,. .. ,K
b
],b ∈
[1,. .. ,N −1]} called window where either K
b
= K
b
or K
b
= K
b
−1 with K
b
∈ N as follows:
maxpool = max
y∈B
f (x −y). (17)
The operation in Eq. 17 looks for the maximum in a
neighborhood given by B along the image axis. Un-
like the convolution operator, the pixel values in this
neighborhood are not combined. Often the maximum
pooling operation is used for downsampling the vol-
ume by restricting x (striding) with stride s ∈ N and A
is restricted to A
′
= {(i
1
,i
2
,. .. ,i
N
)|i
k
∈ [1,1 + s,1 +
2s,. .. ,1 +n
s
s],n
s
= ⌈n
k
/s⌉−1,k ∈ [1 ...N]} with the
ceiling function ⌈·⌉. The strided maximum pooling
operation is then:
x
′
= 1 + sx, max pool = max
y∈B
f (x
′
−y) (18)
where B is simply a binary mask. The strided max-
imum pooling reduces the size of the input image
by only considering every s−th entry along all im-
age axes and discarding all others. ROI-pooling can
easily replace maximum polling in CNN:
ROI pooling( f ,B) = ROI f (x
y
). (19)
In Eq. 19, y is put for the neighborhood in which
x is selected. As maximum pooling, ROI pooling is
parameter free.
To answer to the question if could ROI pool-
ing perform as well as max-pooling in 19, different
grouping operations were performed in a categoriza-
tion context.
Example 4 (ROI Pooling for Automatic Lesion
Segmentation of Stroke Patient). Lack of expertise
or time for interpreting a brain magnetic resonance
imaging (MRI) in the case of stroke increases the risk
of death and disability. This study aims to enable
rapid and accurate assessment of the damage caused
by hyperacute ischemic stroke (< 4.5h) by quantifying
the volume of ischemia. By reducing the variability of
interpretation, it enables a more standardized stroke
diagnosis, and facilitates rapid and consistent treat-
ment decisions by health professionals regardless of
their experience or expertise.
MRI provides information about damage to the
brain. Combined with medical knowledge on blood
flow in the human brain, MRI makes it possible to
identify the thrombus causing the problems and to de-
cide on the treatment of endovascular recanalization
(single or double thrombolysis, thrombectomy).
The stroke dataset was provided with the support
of the neurology group of the Center Hospitalier Sud
Francilien (see (Kobold et al., 2019) for a full descrip-
tion of the dataset). It contains the cranial MRI of 65
stroke patients. The MRI modalities available for this
data set are DWI B0 ADC FLAIR ToF and the corre-
sponding phase modalities. 61 of the patients show a
lesion on DWI, but some exams lack the phase image.
Thus there are only 58 patients with a visible le-
sion on DWI where all terms are available. The 65
Importance Order Ranking for Texture Extraction: A More Efficient Pooling Operator Than Max Pooling?
591

(a) Maximum intensity projection of a patient with mid-
dle carotid artery (MCA) occlusion.
(b) Intensity of injury comparable to that of normal tis-
sue.
Figure 6: Development of a lesion visualized on diffusion
imaging (DWI). (a) The artery stops abruptly at the point
of occlusion (1) (b) Most of the publications deal only with
well developed lesions which take advantage of the high
intensity boundaries. In the hyperacute phase, these borders
are weak or zero and weak intensities complicate the task of
segmentation.
patients all have a visible lesion. MRIs were acquired
from a 1.5 T and 3 T General Electrics MRI machine.
DWI B0 and ADC share the same resolution, as they
are from the same acquisition.
Manual lesion segmentations are available. All
lesions were segmented by at least two neurolo-
gists. Inter-observer agreement, measured in terms of
Dice’s coefficient, was 0.69 ±0.15. The median le-
sion size in the data set is approximately 2,920 voxels:
the MRI is taken in the hyperacute phase of the stroke,
which means that the lesion is growing, may be small
and does not have a well-defined border. This makes
it a more difficult task than the cases that have already
been studied in the literature.
Data augmentation is used because the training set
is too small to generate a model that generalizes well.
Random crops linked to plot sampling works as fol-
lows: the plots are sampled at a size larger than the
intended size for training. For example, the model
is trained on 64×64 then the patches are sampled at
74×74. Then, during training, a 64×64 image is cut
from the 74×74 patch in a random location, but in
such a way that the 64×64 image is entirely contained
in the 74×74 image. The number of possible random
crops for a patch is determined by the patch size dif-
ference and the size of the training image. Once data
is co-registered and normalized, automatic lesion seg-
mentation is performed.
The most common evaluation metric for evaluat-
ing biomedical image segmentations is Dice’s coef-
ficient which measures the overlap of two segmen-
tations but also takes into account their cardinality.
This dependence on cardinality makes it difficult to
tell which value of Dice’s coefficient indicates a good
segmentation result. A perfect segmentation is iden-
tical to the ground truth and gives a Dice’s coefficient
of 1. If there is no overlap, then the dice is 0.
The first method tried is 2d U-Net, trained on
64×64 patches using enhanced lesion image with
DWI (see Fig. 7). 3d U-net, CNN and improved U-
net with ROI were tested.
The segmentation results of the four networks are
given in the table 4. The 3D U-Net again suffers from
the small training set whereas the U-Net generally
learns to detect the lesion but fails in some cases.
The fewer false positive number is found with U-
Net with Spearman ROI. Upon manual inspection,
it turns out that these are very close to the main le-
sion and may even be part of the lesion, depending on
the definition. It is therefore an almost perfect result.
Since the false positives were an insignificant amount
of voxels anyway, the Dice coefficient only changes at
the fourth digit after the decimal indicate. This result
is therefore a segmentation of the lesion at the human
level. It is in particular the first lesion segmentation
that achieves this performance and a better result can-
not be achieved on this type of database. Figure 7
shows an instance of gradual contours of the develop-
ing lesion and contralateral artifacts that only trained
experts can identify as such.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
592
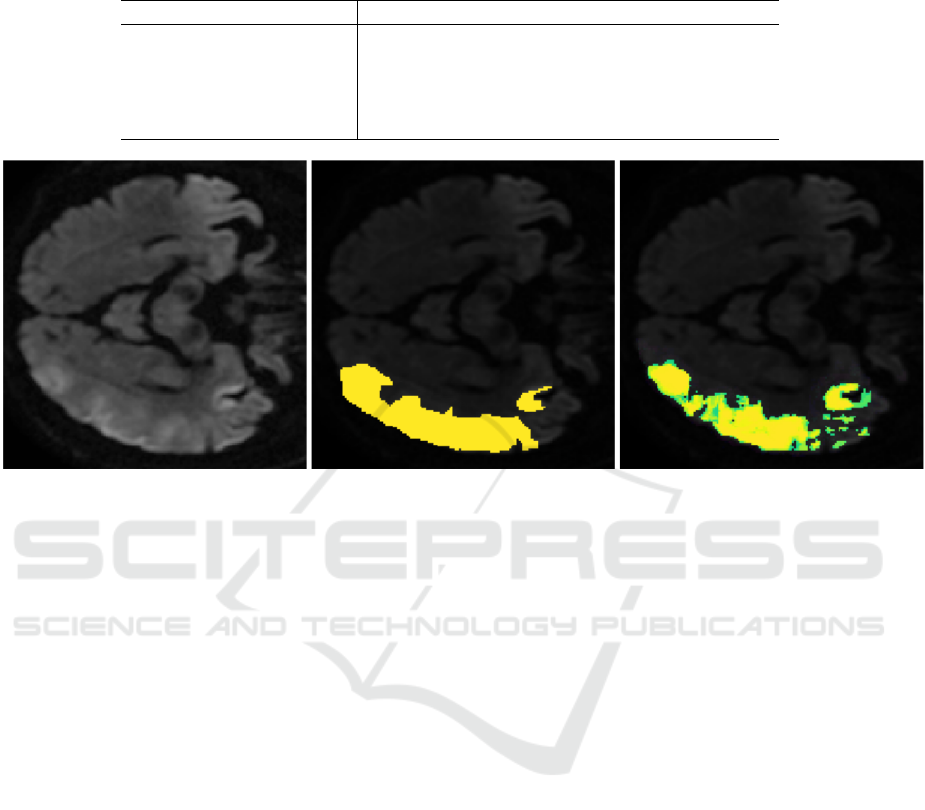
Table 4: Segmentation results for the thrombus. The columns are the Dice coefficient, the mean number of false positive
objects FP and the average ”FP Size”, the mean number of false negative objects FN and their average size ”FN Size” and
the detection rate Dr.
Model Dice FP FP Size FN FN Size Dr
U-Net 0.65 3.3 29.6 0.39 239.5 0.93
3D U-Net 0.56 229.7 215 1.48 643.5 1.0
CNN 0.53 208.3 83.8 0.25 263.9 0.89
U-Net+Spearman ROI 0.8 133.6 94.0 0.14 353.8 0.96
U-Net+ absolute rank ROI 0.76 29.8 76.3 0.25 121.1 1.0
Figure 7: An example of lesion development in the hyperacute phase of stroke (left). The lesion is currently growing and has
no clearly defined borders but instead shows gradients towards normal tissue. The image in the center shows the ground truth
and the one on the right the probability of injury given by the model. Please note that our algorithm correctly identified the
contralateral artifact.
6 CONCLUSION
The rank-order pooling layers are non parametric, in-
dependent of the geometric arrangement or sizes of
the image regions, and can therefore better tolerate
rotations. An other asset of the rank-order pooling
lies in the number of rank-order components g
ℓ
that
the algorithm 1 can generate, which are uncorrelated
from each other and which guarantees optimal (inde-
pendent) feature extraction performance.
When should we pool and when should we not?
The answer depends upon the following considera-
tions, in descending order of importance: (i) if there is
an inadequate number of observations in each of two
(or more) subgroups, which would usually necessitate
pooling (ii) common sense, necessity, etc.
In statistics, ”pooling” means gathering together
small sets of data that are assumed to have the same
value of a characteristic. ROI pooling is transform-
ing convolution features into a new representation that
preserves important information while ignoring irrel-
evant details.
REFERENCES
Benson, D. (2016). Representations of Elementary Abelian
p-Groups and Vector Bundles. Cambridge tracts in
mathematics. Cambridge University Press, 1 edition.
Br
¨
uggemann, R. and Patil, G. (2011). Ranking and Prior-
itization for Multi-indicator Systems: Introduction to
Partial Order Applications. Environmental and Eco-
logical Statistics. Springer-Verlag New York.
Diaconis, P. (1988). Group Representation in Probability
and Statistics., volume 11 of IMS Lecture Series. In-
stitute of Mathematical Statistics, Harvard, USA.
Gehrlein, W. and Lepelley, D. (2011). Voting Paradoxes and
Group Coherence: The Condorcet Efficiency of Voting
Rules. Studies in Choice and Welfare. Springer-Verlag
Berlin Heidelberg, 1 edition.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
learning, volume 1. MIT press Cambridge.
Haralick, R. (1979). Statistical and structural approaches to
texture. In Proceedings of the IEEE, volume 67, pages
786–804.
Kobold, J., V., V., Maaref, H., Fourer, D., Aghasaryan, M.,
Alecu, C., Chausson, N., L’hermitte, Y., Smadja, D.,
and L
¨
ang, E. (2019). Stroke Thrombus Segmenta-
tion on SWAN with Multi-Directional U-Nets. In 9th
IEEE International Conference on Image Processing
Theory, Tools and Applications (IPTA 2019), Proc. of
Importance Order Ranking for Texture Extraction: A More Efficient Pooling Operator Than Max Pooling?
593

the 9th IEEE International Conference on Image Pro-
cessing Theory, Tools and Applications (IPTA 2019),
Istanbul, Turkey.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
bags of features: Spatial pyramid matching for rec-
ognizing natural scene categories. In Proceedings of
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition, volume 2, pages 2169 –
2178.
Ojala, T., Pietik
¨
ainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classification
based on feature distributions. Pattern Recognition,
29:51–59.
Pietikinen, M., Hadid, A., Zhao, G., and Ahonen, T. (2011).
Computer Vision Using Local Binary Patterns, vol-
ume 40 of Computer imaging and vision. Springer.
Savage, R. (1956). Contributions to the theory of rank-order
statistics – the trend case. The Annals of Mathematical
Statistics, 27(3):590–615.
Tan, X. and Triggs, B. (2007). Enhanced local texture fea-
ture sets for face recognition under difficult lighting
conditions. In Analysis and Modeling of Faces and
Gestures, volume 4778 of Lecture Notes in Computer
Science, pages 235–249, Berlin. Springer.
Vigneron, V. and Duarte, L. (2017). Toward rank disag-
gregation: An approach based on linear programming
and latent variable analysis. In Tichavsk
´
y, P., Babaie-
Zadeh, M., Michel, O. J., and Thirion-Moreau, N., ed-
itors, Latent Variable Analysis and Signal Separation,
pages 192–200, Cham. Springer International Pub-
lishing.
Vigneron, V. and Petit, E. (2008). The evaluation of the
impact of the technology transfers from public labora-
tories to private firms : the case of the french nuclear
authority. Fuzzy Economic Review, 13(1).
Vigneron, V. and Tomazeli Duarte, L. (2018). Rank-order
principal components. A separation algorithm for or-
dinal data exploration. In 2018 International Joint
Conference on Neural Networks, IJCNN 2018, Rio de
Janeiro, Brazil, July 8-13, 2018, pages 1–6.
Yadav, N.. author. abd Yadav, A. and Kumar, M. (2015). An
Introduction to Neural Network Methods for Differen-
tial Equations. Springer, Gurgaon, Haryana, India.
Yu, D., Wang, H., Chen, P., and Wei, Z. (2014). Mixed
pooling for convolutional neural networks. In Inter-
national Conference on Rough Sets and Knowledge
Technology, pages 364–375.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
594
