
Path Planning Incorporating Semantic Information
for Autonomous Robot Navigation
Silya Achat, Julien Marzat and Julien Moras
DTIS, ONERA, Universit
´
e Paris Saclay, F-91123 Palaiseau, France
Keywords:
Autonomous Robot Navigation, Path Planning, Semantic Scene Understanding.
Abstract:
This paper presents an approach to take into account semantic information for autonomous robot tasks requir-
ing path planning capabilities. A semantic pointcloud or map serves as input for generating a multi-layered
map structure, which can then be exploited to address various navigation goals and constraints. Semantic-
aware adaptations of A
∗
, Transition-based RRT and a shortcut algorithm are derived in this framework, and
evaluated numerically on an exploration and observation task using a reference dataset with multiple semantic
classes as an illustrative test environment.
1 INTRODUCTION
The combined recent progress in learning algorithms
and computational power have led to the develop-
ment of efficient semantic segmentation capabilities
based on data from embedded LiDAR and/or RGB-D
sensors, processed by (deep) neural networks to pro-
duce 2D annotated images (He et al., 2020) or 3D
pointclouds (Qi et al., 2017; Qi et al., 2020; Car-
valho et al., 2019; Mascaro et al., 2021). The fully-
embedded processing of this key perception asset is
now being reported for Unmanned Aerial Vehicles
(UAV) (Nguyen et al., 2019; Bultmann et al., 2021).
This has paved the way for the development of seman-
tic mapping algorithms, where the 3D representation
of a surrounding environment also includes the cate-
gorization of the perceived 3D points or even 3D ob-
ject segmentation at a higher level (Jadidi et al., 2017;
McCormac et al., 2018; Rosinol et al., 2020; Grin-
vald et al., 2021). Compared to classical mapping
structures which provide binary occupancy informa-
tion, e.g. Octomap (Hornung et al., 2013) or TSDF-
based mapping (Millane et al., 2018), this opens new
possibilities for autonomous robot navigation to di-
rectly take into account multiple mission objectives
and constraints in interaction with the environment.
In this context, we propose a systematic approach to
incorporate semantic mapping information into path
planning algorithms, with the derivation of seman-
tized versions of the A
∗
and Transition-based Rapidly
exploring Random Tree (T-RRT) algorithms as well
as a post-processing shortcut procedure. The seman-
tic map is linked with the planning algorithms within
a multi-layered structure: the classes are ranked by
a user-defined cost representing traversability or ob-
servability constraints, and some classes are also
identified as of particular interest for observation.
The proposed algorithms are evaluated and compared
on typical autonomous robot navigation missions,
namely waypoint rallying in the presence of obsta-
cles and different types of terrain, and the exploration
of an uncharted environment with observation of de-
tected points of interest
1
.
2 RELATED WORK
A limited number of previous works have studied the
exploitation of these newly available semantic clouds
or maps for path planning of autonomous robots. As
described in the recent survey paper (Crespo et al.,
2020), a lot of effort has been put on defining sev-
eral semantic map representations for various tasks
but there are still few complete semantic navigators
linking the proposed maps with planning algorithms,
and more extensive simulation and real-world experi-
ments should be conducted.
In the early work by (Sofman et al., 2006), a 2D cost
map associated with the traversability of an off-road
terrain was obtained by an aerial vehicle to allow the
navigation of a ground robot in a natural environment.
This map was combined with a local map obtained
1
Video at https://tinyurl.com/SemanticPlanning
Achat, S., Marzat, J. and Moras, J.
Path Planning Incorporating Semantic Information for Autonomous Robot Navigation.
DOI: 10.5220/0011134300003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 285-295
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
285

from the on-board sensors of the ground robot, and a
path was then computed with a D
∗
algorithm exploit-
ing the local and global traversability data. However,
the top view can bias the real traversability of the ter-
rain, for example in the case of dense foliage trees on
a flat and passable terrain.
In the context of inspection tasks carried out by an
autonomous ground vehicle in a nuclear storage en-
vironment, (Wang et al., 2018) proposed to exploit a
2D binary custom map of obstacles, which includes
locations and orientations of objects of interest so as
to build an enriched map that can be exploited for
inspection-oriented path planning.
In (Deeken et al., 2014), a Geographic Information
System (GIS) with geometrical and semantic layers is
used to build costmaps that are exploited by the ROS
move base package to carry out a simplified fetch-
and-deliver task with a ground platform. This was a
first successful attempt demonstrating that a semantic
map can be used within navigation modules and not
only for data visualization. In (Suriani et al., 2021),
an active-vision approach has been proposed for an
indoor exploration mission by a mobile robot so as to
generate successive next best views based on the de-
tected segmented objects and associated geometrical
priors on their respective sizes.
The navigation of a rover in the framework of a Mar-
tian mission has been addressed in (Ono et al., 2015).
The onboard sensors provide raw images and a Digi-
tal Elevation Map to plan the rover’s path over rocky
terrain, where each recognized rock is classified. An
RRG algorithm derived from RRT allows to define
waypoints through the rock types to be avoided by
taking into account the positioning of the wheels, and
these waypoints are included in a graph to obtain opti-
mal paths with an A
∗
algorithm. These considerations
on the rover model and the associated path planning
architecture remain however very specific and present
a high computational cost for real-time exploration-
and-observation tasks.
In (Jeffrey Delmerico and Scaramuzza, 2017), a se-
mantic 2D grid has also been exploited for traversabil-
ity evaluation, along with a D
∗
path planning algo-
rithm to reach a destination which is designated by a
human operator in the context of a rescue mission.
An active perception approach has been derived
in (Bartolomei et al., 2020) for the autonomous navi-
gation of a UAV using on-board visual odometry. The
idea is to use semantic classes available in a 3D voxel
map to evaluate perceptually-informative scenes and
therefore maintain a reliable localization. A hierar-
chical structure is proposed, combining an A
∗
path
planner including a penalization related to the infor-
mation content of the voxels, followed by a B-Spline
trajectory optimization which aims at keeping in view
the most informative landmarks. The complementary
development of a reinforcement learning approach to
dynamically identify the most reliable regions for lo-
calization from semantic information was further pre-
sented in (Bartolomei et al., 2021), where this ar-
chitecture has been evaluated in photorealistic sim-
ulations. Another related topic addressed in (Stache
et al., 2021) is to generate relevant trajectories for col-
lecting data so as to obtain a better semantic segmen-
tation in post-processing (e.g., for agricultural appli-
cations), based on an accuracy model linking the UAV
altitude and the current acquired images.
A semantic planner for a UAV equipped with a RGB
camera navigating in an unknown urban environ-
ment has been proposed and evaluated experimentally
in (Ryll et al., 2020). The acquired images are pro-
cessed by a convolutional network to obtain a 2D seg-
mentation and then a projected probabilistic map giv-
ing preference to roads, which are assumed to be safer
to fly over. A high-level long-distance traversability
graph is finally inferred by a deep neural network as
a combination of pre-defined geometrical primitives
and the UAV path is extracted by direct graph search.
In (Sadat et al., 2020), a neural network architecture
aims at providing probabilistic semantic occupancy
layers including current and predicted locations of ve-
hicles and obstacles for a self-driving vehicle in an
urban environment, using voxelized LiDAR data and
a prior mapping. The vehicle trajectory is then se-
lected among a set of motion primitives by optimiz-
ing a cost function including penalty terms related to
safety (computed using the predicted semantic seg-
mentation), and other terms related to driving com-
fort and traffic rules which are independent from the
semantic information.
In (Wolf et al., 2019), semantic information is ex-
ploited for motion planning of an autonomous robot
in an off-road environment, using an ontology-based
behavioural network. This method exploits semantics
for safe navigation, avoiding obstacles and potential
hazards, and slowing down when approaching them,
but does not generate semantically optimised paths.
In (Mozart et al., 2021), a hybrid version of A
∗
re-
lying on a distance map (instead of occupancy) and
a vehicle collision model has been proposed for path
planning in an urban environment. This allows safe
navigation for this specific self-driving car applica-
tion but it is not generalizable to the navigation of any
robotic system in any environment that seeks to opti-
mize the nature of the areas to be traversed.
These previous works mainly focused on a single spe-
cific objective or constraint related to the exploita-
tion or data acquisition of semantic information. In
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
286
this paper, we propose to incorporate data from the
semantic map into a multi-layered structure that can
be readily adapted to many autonomous navigation
tasks requiring path planning from multi-class seman-
tic segmentation. This makes it possible to derive
variations of standard planning algorithms in a more
systematic way than in the above-referenced related
work, so as to efficiently carry out missions with mul-
tiple objectives and constraints.
3 PROPOSED APPROACH
3.1 Problem Formulation
A large majority of robotic tasks carried out by au-
tonomous robots can be split into the definition of a
high-level goal, followed by the generation of a path
that the robot should follow to reach this goal while
respecting a set of constraints. Examples of such tasks
are the rallying of an arbitrary waypoint with obsta-
cle avoidance or taking into account perception con-
straints, next-best-view exploration where successive
goals are generated on the currently known frontier,
fetch-and-deliver tasks where detected objects are de-
fined as targets. The information used in this kind
of process is classically included in discretized 2D or
3D maps, such as binary occupancy grids encoding
the presence of obstacles, exploration grids storing
the explored locations, or more generally costmaps
that can encode arbitrary potential functions depend-
ing on the state of the vehicle (Jaillet et al., 2010).
Multi-layered structures (Lu et al., 2014) can be then
be defined to combine different types of data that can
be accessed simultaneously to evaluate the quality of
the high-level goals or the generated paths.
We define a configuration q in an associated bounded
space S where the task is executed, and the position
state components of q are denoted by ξ ∈ R
n
, with
n = 2 for mobile robots and n = 3 for UAVs. The
other components of q, left unspecified, could rep-
resent orientation and additional multi-body coordi-
nates depending on the task.
A multi-layer map structure M is defined as a set of
n
m
layers M
i
, which can be used to evaluate an ar-
bitrary cost function c
j
(q, M
i
) at any configuration q.
A high-level task goal, defined here as a configura-
tion target q
goal
for the sake of simplicity, can then
be optimally selected by evaluating a utility function
u(C (q
goal
, M )), where C (q, M ) = [c
j
(q, M
i
)]
T
con-
tains all the relevant cost evaluations c
j
( j = 1, ..., n
c
)
from appropriate layers M
i
for this given task.
An associated path P is defined as the ordered list of
m successive configurations q
k
∈ S from the start q
0
to
the goal q
m−1
= q
goal
. The problem can then be for-
mulated as finding an optimal path against some cri-
teria (shortest path, no-collision, granting a sufficient
safety level, ...) which can also be evaluated from the
appropriate set of n
c
functions C (q, M ). A standard
formulation to evaluate the quality of the path can be
derived as the weighted sum:
J(P, M ) =
m−2
∑
k=0
n
c
∑
j=1
c
j
(q
k+1
, M ) · kξ
k+1
− ξ
k
k (1)
where each segment of the path is weighted by the
sum of appropriate costs extracted from the multi-
layered map structure. We study here how the infor-
mation stored in a semantic pointcloud or map can be
further included into this process and how the defi-
nition of goals and paths can be adapted from clas-
sical algorithms. It is assumed that the semantic in-
formation on the environment can be represented by
a closed frame of discernment Ω = {l
1
, l
2
, ..., l
n
} con-
taining all the labels considered l
i
. This allow us to
create a semantic grid S of the environment (in 2D
or 3D, as detailed in Section 3.2), where each cell
of index j of the map contains a label value S
j
∈ Ω.
This semantic grid will be used as a proxy to define
semantic-aware map layers. The following example
of application with a map structure containing 3 lay-
ers is addressed in Figure 1.
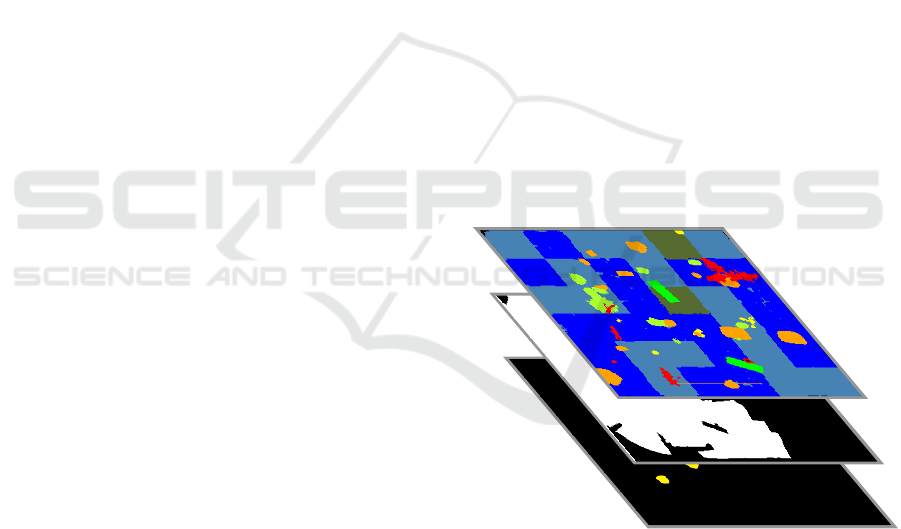
Figure 1: Example of a 3-layer semantized map structure:
• a costmap M
1
derived from the semantic pointcloud to
incorporate traversability or observation constraints;
• a classical exploration grid M
2
with bi-
nary states {unknown ; explored}, in-
dependent from semantic information;
• a binary grid M
3
to monitor the observation of
specific semantic classes during navigation or exploration.
The semantic grid S is used to generate the first
layer M
1
, where each cell j is assigned a cost value
c(q
j
, M
1
) as a function of the corresponding seman-
tic label l
i
in S at the location q
j
corresponding to
the cell j of M
1
. As an application example, we con-
Path Planning Incorporating Semantic Information for Autonomous Robot Navigation
287

sider traversability constraints defined in the follow-
ing way:
c(q
j
, M
1
) = c(ξ
j
, M
1
) =
v
re f
v
max
i
if l
i
traversable
+∞ if l
i
not traversable
(2)
where v
max
i
is the maximum velocity reachable in safe
conditions for a robot located at position ξ
j
with la-
bel l
i
, and v
re f
= max
i
(v
max
i
). This can translate, e.g.,
constraints related to the motion of a ground robot
on a specific soil type or the presence of sufficient
textures in the scene for vision-based localization, as
in (Bartolomei et al., 2020) for the latter. For a simple
navigation task to an arbitrary waypoint considering
only the information from this map layer M
1
, the pro-
posed cost function (1) simplifies with a single cost
c(ξ
k
, M
1
) as defined in (2). Thus, for a path section
within a label area i such that v
re f
= v
max
i
, the cost
associated to this label would be equal to 1, so the
cost for this path section would be equivalent to its
Euclidean distance. It should then be minimized by
a candidate planning algorithm to incorporate this se-
mantic information in relation with the mission car-
ried out. As a byproduct, it can be directly used
to evaluate the paths obtained and thus compare the
efficiency of different planners for such a task (see
Section 4). Note that the infeasibility character of a
path is directly obtained from the definition of non-
traversable infinite costs in (2).
The second layer M
2
is used to monitor a standard ex-
ploration mission, where the next best view (NBV) is
evaluated by considering the current frontier between
explored and known cells (see Section 3.4). Then,
the path to this NBV is generated using the process
defined above, which takes into account traversabil-
ity via layer M
1
. Finally, we consider an independent
subset V ⊂ Ω containing a list of labels that should
be observed during exploration, with a binary visit
status updated in the corresponding layer M
3
. Note
that other types of map layers could be considered for
alternative tasks.
3.2 Semantic Data Representation
The construction of a discretized metric-semantic
map is a mandatory requirement for the presented
planning approach. Although the real-time construc-
tion of such a map is outside the scope of this work,
since the focus here is on the comparison of planning
strategies, it is reasonable to consider the availabil-
ity of such a map in the near future. Indeed, several
recent works in this area have given promising re-
sults. The mapping approaches proposed by (Rosinol
et al., 2020; Grinvald et al., 2019) fuse directly im-
age semantic segmentation produced by deep learn-
ing algorithms such as (Ronneberger et al., 2015; He
et al., 2020) to build 3D TSDF semantic maps. Oth-
ers works as (Thomas et al., 2019; Landrieu and Si-
monovsky, 2018) on pointcloud semantic segmenta-
tion reach a high level of accuracy and could also be
used to produce such a map.
For the purpose of this work, we have used a seman-
tic pointcloud taken from the Garden outdoor dataset
of the 3DRMS reference challenge (Tylecek et al.,
2018), as a basis for the numerical experiments re-
ported in Section 4. To obtain a discrete semantic
map structure, the labeled pointcloud is voxelized fol-
lowing a transformation similar to the one proposed
in (Guiotte et al., 2019). For each voxel, its label l ∈ Ω
is assigned following a majority vote including all the
points belonging to this voxel. If no point belongs to
a voxel then its label is assigned to free. Let h be the
resolution of a voxel, a point {x, y, z} is part of a voxel
{i, j, k} if it satisfies:
x s.t. ih ≤ x < (i + 1)h
y s.t. jh ≤ y < ( j + 1)h
z s.t. kh ≤ z < (k + 1)h
(3)
In the case of a ground robot, a 2D grid is usually suf-
ficient and also more suitable for traversability rep-
resentation since it implicitly models the ground sur-
face. This grid is computed by projecting along the
z axis taking the label of the higher non-free voxel
as the label of the 2D cell that does not exceeds a
threshold z
th
. This threshold, above which the vox-
els are not taken into account, should be set to be of
the order of magnitude of the height of the robot. Tak-
ing the z
th
threshold into account makes it possible to
avoid, for example, the robot bypassing the projec-
tion of the branches of a tree if this class is consid-
ered non-traversable. Figure 2 illustrates the result of
this pre-processing, where the left view shows the 3D
voxelized map and the right view shows the 2D pro-
jected grid exploited in the remainder of the paper,
each color representing a distinct label (see Table 1).
3.3 Planning Algorithms
Modified versions of A
∗
, T-RRT and a shortcut pro-
cedure taking into account the mapping structure de-
scribed above are provided. Note that other graph-
based or sampling-based path planning algorithms
can be adapted in a similar fashion.
1) A weighted A
∗
algorithm (Ebendt and Drechsler,
2009) is used to take into account the semantic-aware
traversability layer M
1
defined in Section 3.1 to com-
pute a path P from a starting node q
0
to a destina-
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
288
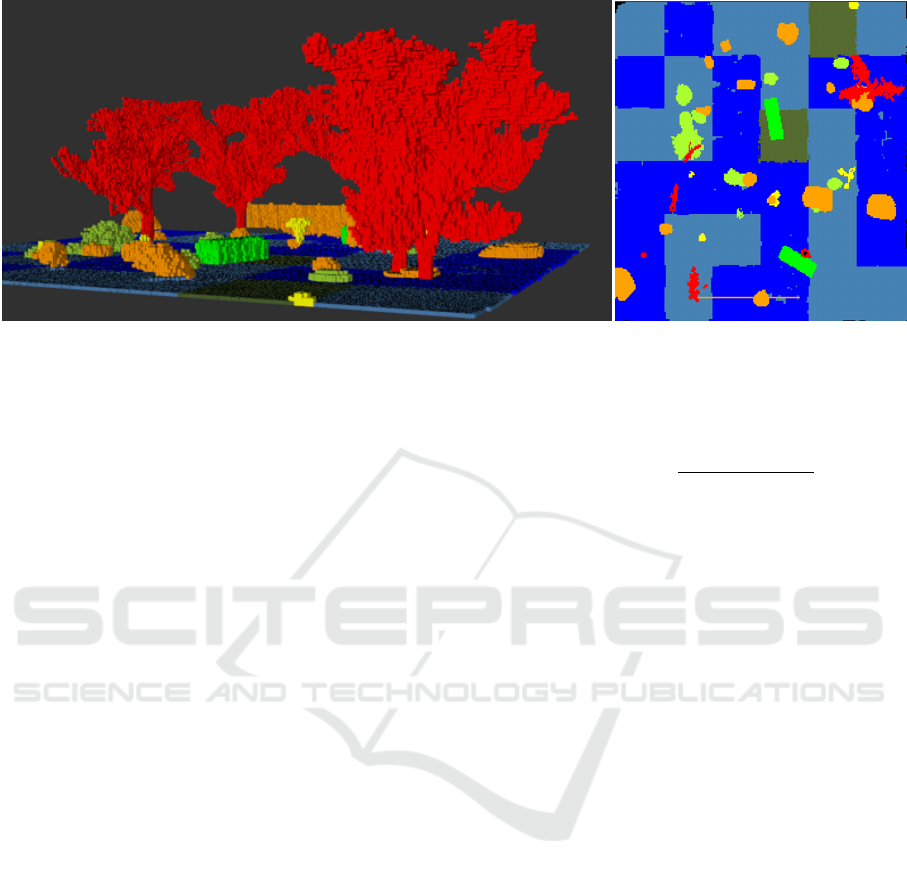
Figure 2: Voxelized 3D semantic grid (left) and 2D projection for mobile robot path planning (right) based on the 3DRMS
dataset (Tylecek et al., 2018).
tion q
goal
, with an initially unknown path length (i.e.,
the number of intermediate points m), minimizing the
cost function (1). The navigation graph is generated
with the same discretization as the map cells.
In the A
∗
process, the transition function g from the
current node q
cur
(defined at the start as q
0
with value
g(q
0
, M
1
) = 0) to a candidate node q
nei
among the
eight neighbours is taken as the sum of the cumulated
cost at q
cur
and the distance between the correspond-
ing positions ξ
nei
and ξ
cur
weighted by the cost corre-
sponding to the semantic label of the node q
nei
, as
g(q
nei
, M
1
) = g(q
cur
, M
1
) + c(q
nei
, M
1
) · kξ
nei
− ξ
cur
k
(4)
The classical Euclidean distance heuristic for attrac-
tion to the goal q
goal
is then applied without weight,
f (q
nei
, q
goal
, M
1
) = g(q
nei
, M
1
) + kξ
goal
− ξ
nei
k (5)
Note that the cost c(q
nei
, M
1
) as defined in (2) is never
less than 1, so the Euclidean distance kξ
goal
− ξ
nei
k is
always lower than or equal to the actual optimal path
cost, which guarantees the admissibility of the chosen
heuristic.
2) Transition-based RRT (T-RRT) (Jaillet et al., 2010)
is an extension of the Rapidly-Exploring Random
Tree path finding algorithm which probabilizes the
conservation of the new nodes of a tree, and thus the
transitions of this tree, according to a costmap so as
to favor the valleys and saddle points. The proposed
semantic-aware version of this algorithm probabilizes
the tree transitions depending on the costmap M
1
de-
rived from the semantic data. The transition proba-
bility p from a new sampled node q
new
to the near-
est node included in the tree q
near
of respective costs
c
new
= c(q
new
, M
1
) and c
near
= c(q
near
, M
1
) is then
taken as
p(q
new
, q
near
) =
1 if c
new
< c
near
exp
c
near
− c
new
T · kξ
near
− ξ
new
k
else
(6)
where T is a temperature parameter. It can be noted
that if q
new
is not a traversable node (i.e. c
new
= +∞),
then the transition probability p from q
near
to q
new
is
equal to 0. In the implemented version, the minEx-
pandControl introduced in the classical formulation
of the algorithm to maintain a minimal rate of expan-
sion toward unexplored regions has been deactivated
and replaced by a bias towards the target with uni-
form probability 5%, in which case the tree is not ex-
panded towards a random node q
rand
of the configura-
tion space, but towards the target node q
goal
.
3) Paths generated by sampling-based algorithms usu-
ally require to be post-processed by a shortcut strat-
egy (Campana et al., 2016) to remove intermediate
nodes that were useful to explore the space but re-
sult in an increase of the overall length, which usually
does not take into account the terrain traversability or
any other related characteristic that could be obtained
from semantic information. In the present context,
nodes can be removed from a generated path P ob-
tained either with the A
∗
or the T-RRT strategy if two
successive nodes of the path correspond to the same
class label in the semantic grid (which also contains
obstacle classes in our case). The paths are stored
such that each node points to the next in the path
(a node thus corresponds to a waypoint, and the last
node of the path q
m−1
points to NULL). The proposed
semantic-aware shortcut algorithm iterates on the path
with three node pointers i, j
prev
and j which initially
point respectively to q
0
, q
1
and q
2
. Then, as long as
there is no obstacle or label change between the nodes
q
i
and q
j
(which is verified by a line iterator travers-
Path Planning Incorporating Semantic Information for Autonomous Robot Navigation
289

ing [q
i
, q
j
] in the semantic grid S ), then the pointers j
and j
prev
are moved forward to the next nodes of the
path. When a label change is detected between i and
j, then a shortcut is made between the nodes pointed
by i and j
prev
such that q
i
points to q
j
prev
in the short-
cutted path P
s
. The procedure is then iterated until j
points to the target node q
m−1
.
3.4 Next-Best-View Exploration
An exploration task consisting in the observation of
the full bounded space by an autonomous robot us-
ing a sensor with a field of view (FOV) limited in de-
tection angle and range (90 deg and 3 m in our ex-
periments) has been studied as a case study including
the computation of high-level goals and path planning
from semantic information. The multi-layered map
M defined in Section 3.1 is initially unknown and
discovered during exploration. A standard Next-Best-
View (NBV) strategy (Gonz
´
alez-Banos and Latombe,
2002; Darmanin and Bugeja, 2016) has been defined,
where the map layer M
2
monitors the binary status
(observed or not) of the cells of the environment. This
layer is eroded with a circular structuring element
larger than the radius of the robot to take into ac-
count its dimensions for obstacle avoidance. A com-
plementary sub-task has been considered to observe
objects belonging to a class of interest when they
are detected during exploration (similar to the explo-
ration and observation problem addressed in (Okada
and Miura, 2015)), whose observation is monitored
using the map layer M
3
to store the binary observa-
tion status of this specific class (positions of the ob-
jects are updated from the semantic grid S when the
corresponding cell has been observed). The NBV is
primarily selected to observe the closest points of in-
terest of the latter layer at a close distance in the robot
FOV. When there is no remaining point of interest in
M
3
at a given instant, a random number of NBV can-
didates are sampled such that their position is on the
border cells of the exploration layer M
2
with a yaw
reference given by the normal to the border (com-
puted using a Sobel filter). The NBV is then cho-
sen as the candidate with the maximum number of
unobserved cells that could be seen in the FOV. Af-
ter the NBV has been calculated, a path P between
the current robot position and this NBV is computed
using either the previously presented semantic-aware
A
∗
or the T-RRT algorithms followed by the seman-
tic shortcut post-processing strategy, all relying on the
map layer M
1
containing the traversability costs and
with the additional constraint that unobserved areas
(in map layer M
2
) are not traversable either.
4 NUMERICAL EXPERIMENTS
Repeated simulations have been carried out to eval-
uate the strategies proposed in the previous section,
based on the 2D projection of the semantic grid de-
fined in Section 3.2 from the 3DRMS reference se-
mantized pointcloud, which contains 243×256 cells
with a 5×5 cm
2
resolution. Table 1 summarizes the
semantic classes, with the user-defined cost they have
been assigned in the map layer M
1
corresponding to
traversability (3 classes with different allowed speeds,
the other ones being non-traversable) and the obser-
vation interest which is used to fill the map layer M
3
,
here on the single flower class. It could be noted that
this class is non-traversable but is of interest for ob-
servation, which further motivates the use of the pro-
posed multi-layered structure. Table 1 also lists the
colors associated to the classes, which are used in all
the figures displaying 2D or 3D views. The developed
algorithms have been implemented in C++ and run
within a Ubuntu 18.04 Virtual Machine with 4096MB
RAM on a Intel Core i5 8th generation CPU.
4.1 Path Planning Unitary Tests
A first evaluation campaign was carried out to eval-
uate path planning performance with respect to the
semantic-weighted cost function (1) and computa-
tion time. The weighted A
∗
and T-RRT algorithms
with shortcutting have been compared, along with
a standard A
∗
procedure (which does not use the
costmap M
1
) as a baseline. For this purpose, 100 pairs
of sufficiently distant start and goal positions have
been sampled in the free space of the map. As the
distances between each pair of start and goal positions
vary, the weighted path length have been normalized
by the distance between the two positions of each
pair (see Table 2). A first result is that the semantic-
aware weighted A
∗
always obtains shorter weighted
path lengths compared to the standard A
∗
algorithm
computed with an Euclidean distance heuristic.
Table 1: Semantic labels and related costs.
Label
l
i
Label
Name
Color
Cost
c
i
(M
1
)
Visit
interest
(M
3
)
l
1
grass dark blue 1.0 0
l
2
ground pale blue 2.0 0
l
3
paving dark green 3.0 0
l
4
hedge bright green ∞ 0
l
5
topiary light green ∞ 0
l
6
flower yellow ∞ 1
l
7
stone orange ∞ 0
l
8
tree red ∞ 0
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
290
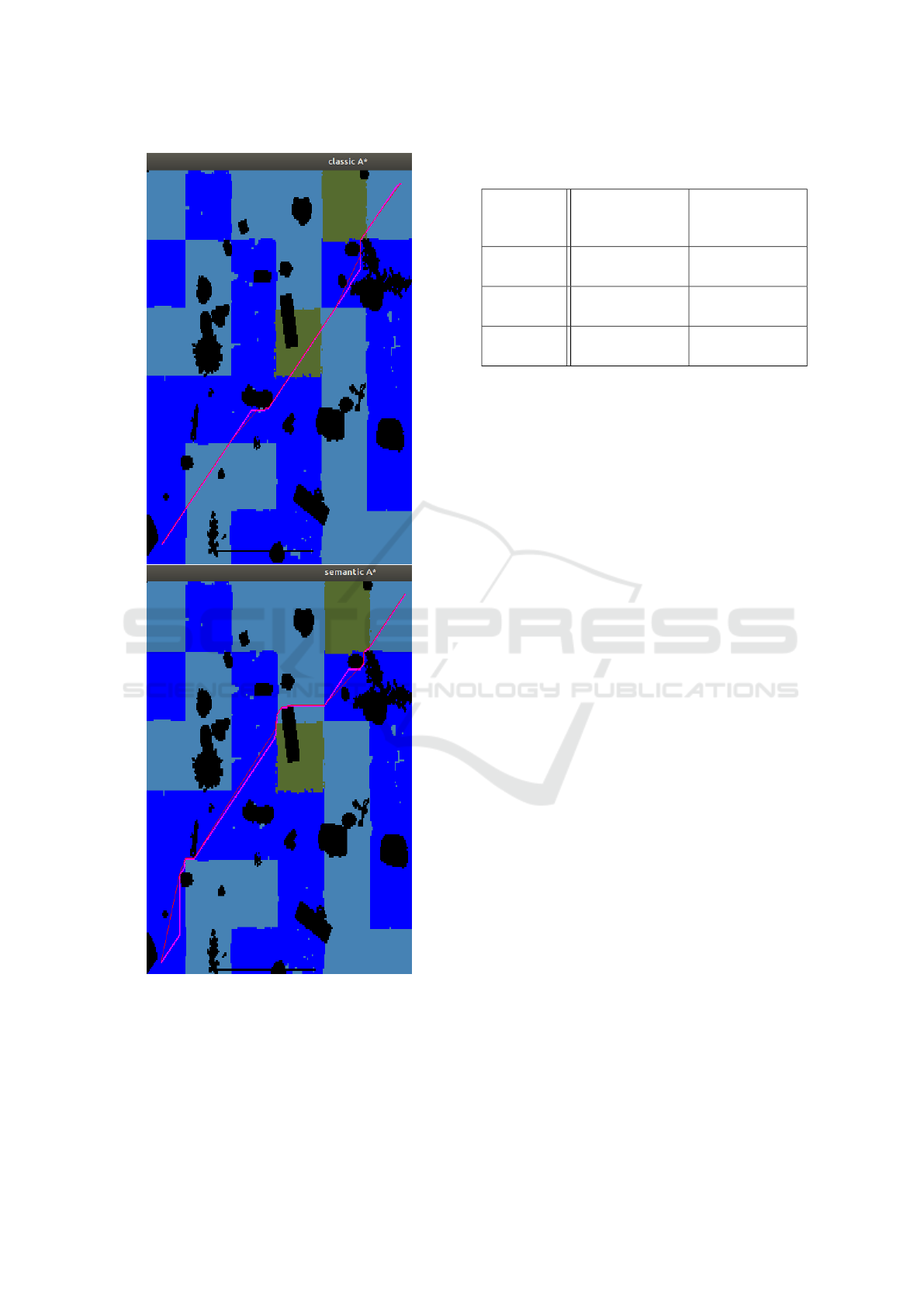
Figure 3: Paths generated with classical (up) and semantic-
aware (down) A
∗
. Initial paths are displayed in pink and
semantic-based shortcuts in red.
On the other hand, the weighted version takes on av-
erage more than twice as long to execute, and is faster
in only 5% of cases. This is due to the fact that the
paths obtained with a classical A
∗
are shorter in terms
Table 2: Comparison of path planners with semantic infor-
mation. 100 runs, averaged results (± std.)
Planning
method
Path weighted
length
(normalized)
Computation
Time (ms/pix)
Standard
A
∗
1.70 (± 0.259)
0.0687
(± 3.31e-02)
Weighted
A
∗
1.40 (± 0.140)
0.153
(± 5.91e-02)
T-RRT 2.02 (± 0.407)
0.0968
(± 0.191)
of Euclidean distance, and thus fewer nodes of the
semantic grid M need to be evaluated before the al-
gorithm reaches the target. Two respective paths gen-
erated by both algorithms are displayed in Figure 3.
It can be seen that the less costly semantic class (dark
blue) is favored by the weighted version. The T-RRT
algorithm is on average faster to execute than the A
∗
ones (in 82% of the runs), however the A
∗
procedures
provide shorter paths. This is a well-known trade-off
when graph-based and sampling-based algorithms are
compared on the same task, and this is also related to
the relative simplicity of the test environment which
presents many traversable areas. In 3D more complex
environments, the complexity of the graph-based A
∗
strategies would pose more computational challenges
and the T-RRT algorithm will probably be more ro-
bust to dimension increase.
4.2 Exploration-and-Observation Task
The NBV exploration and observation scheme has
then been evaluated using the above weighted A
∗
and
T-RRT procedures (Figure 4). Note that in the sim-
ulation, the robot speed depends on the traversabil-
ity class label at its current position, according to the
cost values listed in Table 1 and the inversely propor-
tional rule defined by (2). The following two mis-
sions have been investigated: the case of a simple ex-
ploration of the map (pure exploration) and the case
of an exploration with observation of objects of in-
terest (layer M
3
), in this case those labeled l
6
. 100
simulations with random initialization have been per-
formed with each path planning algorithm, half of
which aimed at visiting the flowers in the semantic
map as soon as they were detected. The exploration
performance indicators corresponds to the number of
observed cells as a function of the number of algo-
rithm iterations for both missions, and the additional
number of iterations to visit all objects of interest for
the observation task. Table 3 summarizes the perfor-
mance indices obtained, while the cumulated perfor-
mance indices during the missions are displayed in
Path Planning Incorporating Semantic Information for Autonomous Robot Navigation
291
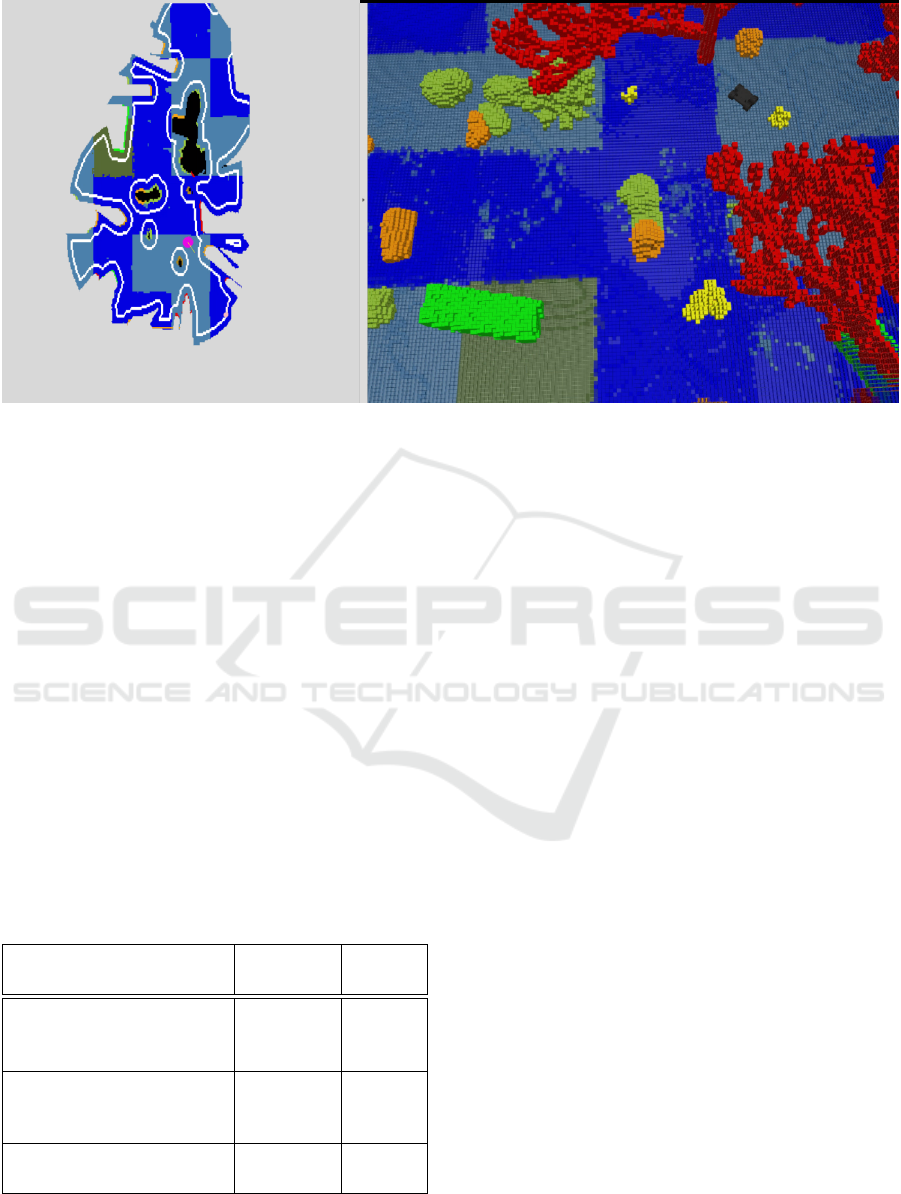
Figure 4: Example of semantic-aware exploration and observation. Left: Real-time update of coverage layer (robot position
in pink, frontier nodes in white). Right: Ground truth visualization of the semantic 3D voxel grid from which information is
extracted. Colors of semantic classes according to Table 1. Video available at https://tinyurl.com/SemanticPlanning.
Figures 5 and 6. All the tasks have been success-
fully completed (with a stopping coverage criterion at
90% of the free space, which corresponds to 70% of
the full space) and the convergence curves are glob-
ally consistent. As a consequence of the unitary path
planning tests, it follows that although the T-RRT
planner is faster in calculating paths, exploration is
more efficient in terms of number of iterations with
the weighted A
∗
algorithm because computation time
is compensated by the optimality of the path lengths.
Indeed, the robot takes less time to reach the targets
and this largely compensates for the slight additional
path calculation time in this 2D evaluation case. The
same trend is observed in the convergence rates to the
maximum number of visited objects of interest.
Table 3: Performance indices for Exploration/Observation
tasks. 50 runs, averaged results (± std.)
Path planner for NBV
rallying
Weighted
A
∗
T-RRT
Nb of iterations for 90%
coverage, without visiting
a class of interest
1381
(± 223)
1520
(± 438)
Nb of iterations for 90%
coverage, while visiting a
class of interest
1581
(± 321)
1682
(± 357)
Nb of iterations to visit
all objects of interest
854
(± 361)
944
(± 401)
5 CONCLUSIONS
An approach has been proposed in this paper to in-
corporate information available from semantic point-
clouds or maps into autonomous robot navigation
tasks that can be decomposed into high-level goals
followed by path planning. An example of con-
struction of a multi-layered map incorporating seman-
tic information to define costs or observation targets
has been proposed, and it has been shown how the
classical A
∗
and T-RRT planning algorithms can be
adapted. This has been evaluated numerically for
waypoint rallying and exploration-and-observation
tasks, with promising results.
The design and testing of a fully embedded process
for mobile or aerial robots including semantic learn-
ing, map building and autonomous navigation will be
the focus of future work. This includes the analysis of
the on-line construction of semantic maps and the best
way to represent this information and associated un-
certainty for autonomous navigation. The extension
to multiple robots or heterogeneous teams, with the
fusion of viewpoints to integrate semantic data into
distributed 3D maps and use them in such planning
algorithms will also be challenging problems.
ACKNOWLEDGMENTS
This research was partially supported by the French
Grant ANR DELICIO (ANR-19-CE23-0006).
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
292
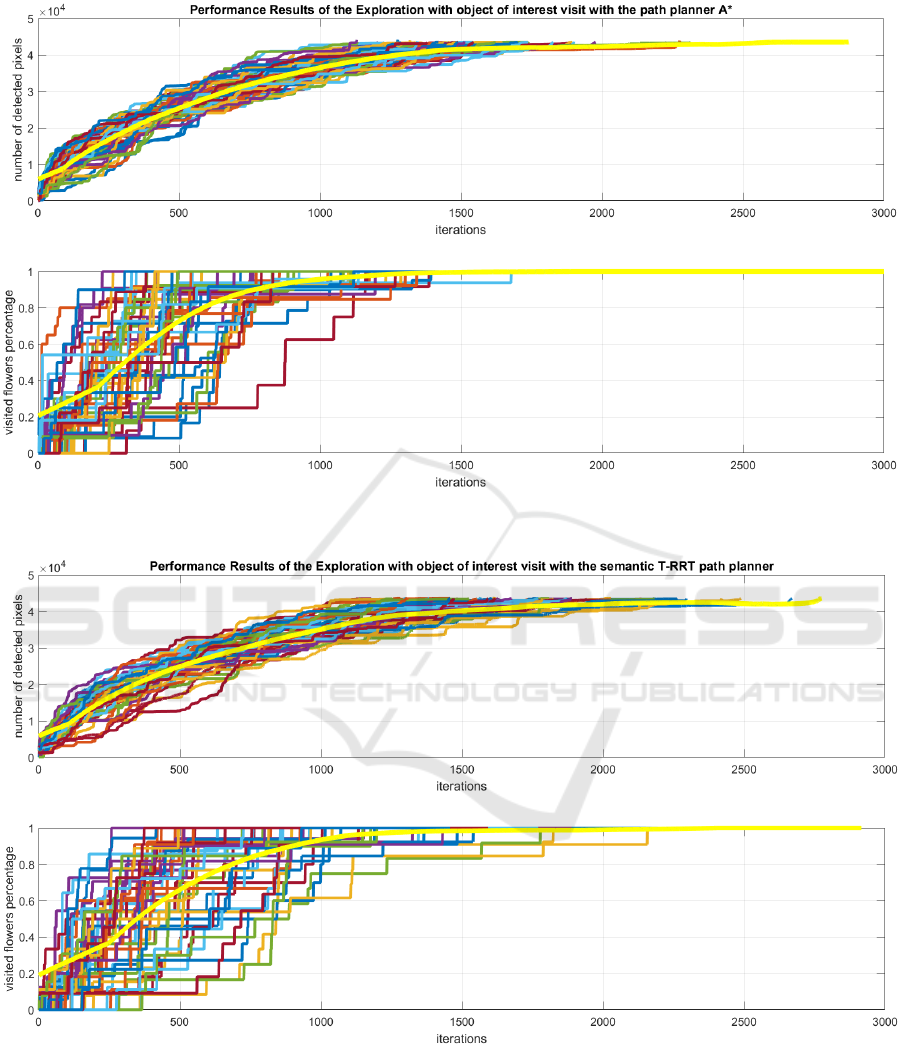
Figure 5: Cumulated coverage and visit of classes of interest during Exploration task with semantic-aware A
∗
planner to reach
NBVs (50 runs). The yellow curves correspond to the mean values.
Figure 6: Cumulated coverage and visit of classes of interest during Exploration task with semantic-aware T-RRT planner to
reach NBVs (50 runs). The yellow curves correspond to the mean values.
Path Planning Incorporating Semantic Information for Autonomous Robot Navigation
293

REFERENCES
Bartolomei, L., Pinto Teixeira, L., and Chli, M. (2021).
Semantic-aware active perception for UAVs using
deep reinforcement learning. In IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS).
Bartolomei, L., Teixeira, L., and Chli, M. (2020).
Perception-aware path planning for UAVs using se-
mantic segmentation. In 2020 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS),
pages 5808–5815.
Bultmann, S., Quenzel, J., and Behnke, S. (2021). Real-
time multi-modal semantic fusion on unmanned aerial
vehicles. In European Conference on Mobile Robots
(ECMR).
Campana, M., Lamiraux, F., and Laumond, J.-P. (2016). A
gradient-based path optimization method for motion
planning. Advanced Robotics, 30(17-18):1126–1144.
Carvalho, M., Ferrera, M., Boulch, A., Moras, J., Le Saux,
B., and Trouv
´
e-Peloux, P. (2019). Technical Report:
Co-learning of geometry and semantics for online 3D
mapping. arXiv:1911.01082.
Crespo, J., Castillo, J. C., Mozos, O. M., and Barber, R.
(2020). Semantic information for robot navigation: A
survey. Applied Sciences, 10(2):497.
Darmanin, R. and Bugeja, M. (2016). Autonomous ex-
ploration and mapping using a mobile robot running
ROS. In International Conference on Informatics in
Control, Automation and Robotics (ICINCO), pages
208–215.
Deeken, H., Puetz, S., Wiemann, T., Lingemann, K., and
Hertzberg, J. (2014). Integrating semantic informa-
tion in navigational planning. In 41st International
Symposium on Robotics, pages 1–8.
Ebendt, R. and Drechsler, R. (2009). Weighted A
∗
search–
unifying view and application. Artificial Intelligence,
173(14):1310–1342.
Gonz
´
alez-Banos, H. H. and Latombe, J.-C. (2002). Naviga-
tion strategies for exploring indoor environments. The
International Journal of Robotics Research, 21(10-
11):829–848.
Grinvald, M., Furrer, F., Novkovic, T., Chung, J. J., Ca-
dena, C., Siegwart, R., and Nieto, J. (2019). Volumet-
ric Instance-Aware Semantic Mapping and 3D Object
Discovery. IEEE Robotics and Automation Letters,
4(3):3037–3044.
Grinvald, M., Tombari, F., Siegwart, R., and Nieto, J.
(2021). TSDF++: A multi-object formulation for
dynamic object tracking and reconstruction. In In-
ternational Conference on Robotics and Automation
(ICRA).
Guiotte, F., Lef
`
evre, S., and Corpetti, T. (2019). Attribute
filtering of urban point clouds using max-tree on voxel
data. In International Symposium on Mathematical
Morphology and Its Applications to Signal and Image
Processing, pages 391–402.
He, K., Gkioxari, G., Dollar, P., and Girshick, R. (2020).
Mask R-CNN. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 42(2):386–397.
Hornung, A., Wurm, K. M., Bennewitz, M., Stachniss, C.,
and Burgard, W. (2013). OctoMap: An efficient prob-
abilistic 3D mapping framework based on octrees. Au-
tonomous Robots, 34(3):189–206.
Jadidi, M. G., Gan, L., Parkison, S. A., Li, J., and Eustice,
R. M. (2017). Gaussian processes semantic map rep-
resentation. arXiv preprint arXiv:1707.01532.
Jaillet, L., Cort
´
es, J., and Sim
´
eon, T. (2010). Sampling-
based path planning on configuration-space costmaps.
IEEE Transactions on Robotics, 26(4):635–646.
Jeffrey Delmerico, Elias Mueggler, J. N. and Scaramuzza,
D. (2017). Active autonomous aerial exploration for
ground robot path planning. In IEEE Robotics and
Automation Letters, volume 2, pages 664–671.
Landrieu, L. and Simonovsky, M. (2018). Large-scale point
cloud semantic segmentation with superpoint graphs.
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 4558–4567.
Lu, D. V., Hershberger, D., and Smart, W. D. (2014).
Layered costmaps for context-sensitive navigation.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 709–715.
Mascaro, R., Teixeira, L., and Chli, M. (2021). Dif-
fuser: Multi-view 2D-to-3D label diffusion for seman-
tic scene segmentation. In IEEE International Confer-
ence on Robotics and Automation (ICRA).
McCormac, J., Clark, R., Bloesch, M., Davison, A., and
Leutenegger, S. (2018). Fusion++: Volumetric object-
level SLAM. In International Conference on 3D Vi-
sion (3DV), pages 32–41.
Millane, A., Taylor, Z., Oleynikova, H., Nieto, J., Sieg-
wart, R., and Cadena, C. (2018). C-blox: A scalable
and consistent TSDF-based dense mapping approach.
In IEEE/RSJ International Conference on Intelligent
Robots and Systems, Madrid, Spain, pages 995–1002.
Mozart, A., Moraes, G., Guidolini, R., Cardoso, V. B.,
Oliveira-Santos, T., de Souza, A. F., and Badue, C. S.
(2021). Path planning in unstructured urban environ-
ments for self-driving cars. In International Con-
ference on Informatics in Control, Automation and
Robotics (ICINCO).
Nguyen, T., Shivakumar, S. S., Miller, I. D., Keller, J., Lee,
E. S., Zhou, A.,
¨
Ozaslan, T., Loianno, G., Harwood,
J. H., Wozencraft, J., Taylor, C. J., and Kumar, V.
(2019). Mavnet: An effective semantic segmentation
micro-network for MAV-based tasks. IEEE Robotics
and Automation Letters, 4(4):3908–3915.
Okada, Y. and Miura, J. (2015). Exploration and observa-
tion planning for 3D indoor mapping. In IEEE/SICE
International Symposium on System Integration (SII),
pages 599–604.
Ono, M., Fuchs, T. J., Steffy, A., Maimone, M., and Yen,
J. (2015). Risk-aware planetary rover operation: Au-
tonomous terrain classification and path planning. In
IEEE Aerospace Conference, Big Sky, MT, USA, pages
1–10.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017). Pointnet:
Deep learning on point sets for 3d classification and
segmentation. In Proceedings of the IEEE Conference
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
294

on Computer Vision and Pattern Recognition, pages
652–660.
Qi, X., Wang, W., Liao, Z., Zhang, X., Yang, D., and Wei,
R. (2020). Object semantic grid mapping with 2D Li-
DAR and RGB-D camera for domestic robot naviga-
tion. Applied Sciences, 10(17):5782.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional networks for biomedical image seg-
mentation. Medical Image Computing and Computer-
Assisted Intervention (MICCAI).
Rosinol, A., Abate, M., Chang, Y., and Carlone, L. (2020).
Kimera: an open-source library for real-time metric-
semantic localization and mapping. In IEEE In-
ternational Conference on Robotics and Automation
(ICRA), pages 1689–1696.
Ryll, M., Ware, J., Carter, J., and Roy, N. (2020). Se-
mantic trajectory planning for long-distant unmanned
aerial vehicle navigation in urban environments. In
IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pages 1551–1558.
Sadat, A., Casas, S., Ren, M., Wu, X., Dhawan, P., and Ur-
tasun, R. (2020). Perceive, predict, and plan: Safe
motion planning through interpretable semantic rep-
resentations. In European Conference on Computer
Vision (ECMR), pages 414–430.
Sofman, B., Lin, E., Bagnell, J. A., Cole, J., Vandapel, N.,
and Stentz, A. (2006). Improving robot navigation
through self-supervised online learning. Journal of
Field Robotics, 23(11-12):1059–1075.
Stache, F., Westheider, J., Magistri, F., Popovi
´
c, M., and
Stachniss, C. (2021). Adaptive path planning for
UAV-based multi-resolution semantic segmentation.
In European Conference on Mobile Robots (ECMR).
Suriani, V., Kaszuba, S., Sabbella, S. R., Riccio, F., and
Nardi, D. (2021). S-AVE: Semantic active vision
exploration and mapping of indoor environments for
mobile robots. In European Conference on Mobile
Robots (ECMR).
Thomas, H., Qi, C. R., Deschaud, J.-E., Marcotegui, B.,
Goulette, F., and Guibas, L. J. (2019). Kpconv: Flexi-
ble and deformable convolution for point clouds. Pro-
ceedings of the IEEE International Conference on
Computer Vision (ICCV).
Tylecek, R., Sattler, T., Le, H.-A., Brox, T., Pollefeys, M.,
Fisher, R. B., and Gevers, T. (2018). The second work-
shop on 3D reconstruction meets semantics: Chal-
lenge results discussion. In Proceedings of the Euro-
pean Conference on Computer Vision (ECCV) Work-
shops.
Wang, M., Long, X., Chang, P., and Padlr, T. (2018).
Autonomous robot navigation with rich information
mapping in nuclear storage environments. In IEEE
International Symposium on Safety, Security, and Res-
cue Robotics (SSRR).
Wolf, P., Ropertz, T., Feldmann, P., and Berns, K. (2019).
Combining onthologies and behavior-based control
for aware navigation in challenging off-road environ-
ments. In International Conference on Informatics in
Control, Automation and Robotics (ICINCO), pages
135–146.
Path Planning Incorporating Semantic Information for Autonomous Robot Navigation
295
