
Optimal Prediction of Tessarine Signals from Multi-sensor Uncertain
Observations under T
k
-Properness Conditions
Jos
´
e Domingo Jim
´
enez-L
´
opez
a
, Rosa Mar
´
ıa Fern
´
andez-Alcal
´
a
b
, Jes
´
us Navarro-Moreno
c
and Juan Carlos Ruiz-Molina
d
Department of Statistics and Operations Research, University of Ja
´
en, Paraje Las Lagunillas s/n, 23071 Ja
´
en, Spain
Keywords:
Multisensor Systems, Optimal Prediction, Tessarine Signal Processing, T
k
-Properness Conditions, Uncertain
Observations.
Abstract:
In this paper, the optimal one-stage prediction problem of tessarine signals from multi-sensor uncertain ob-
servations is approached. At each instant of time, there exists a non-null probability that the observation
tessarine component coming from each sensor, contains the corresponding signal component, or only noise.
To model the uncertainty, multiplicative noises modeled by Bernoulli random variables are included in the
observation equations. Under correlation hypotheses between the signal and observation additive noises, a
recursive algorithm to calculate the optimal least-squares linear predictor of the signal and its mean-squared
error is proposed, derived by using an innovation approach. The theoretical results are illustrated by means
of a numerical simulation example, in which the performance of the proposed estimator is evaluated under
different uncertainty probabilities.
1 INTRODUCTION
Traditionally, the real and complex domains have con-
stituted the framework to model random signals in dy-
namical systems. However, in the last two decades,
there has been an increasing interest in the scientific
community to study higher-dimensional spaces, due
to the fact that they are more appropriate to model a
great number of physical phenomena. As an exam-
ple, hypercomplex signals are used to model biomed-
ical phenomena (Abbasi-Kesbi and Nikfarjam, 2018;
Ajdaroski et al., 2022), avionics, as unmanned aerial
vehicles (Zheng et al., 2020; Qu and Yi, 2022), neu-
ral networks (Bayro-Corrochano et al., 2021; Wei
et al., 2022), acoustic applications (Ortolani et al.,
2016; Celsi et al., 2020), communication (Grakhova
et al., 2019; Ahmad et al., 2021), image processing
(Augereau and Carr
´
e, 2017; Yang et al., 2022), etc.
Recently, in real signal processing, estimation
problems have been approached from observations
provided by multiple sensors. The fact that the sig-
nal is estimated from multisensor observations, yields
a
https://orcid.org/0000-0003-1263-5508
b
https://orcid.org/0000-0002-3329-6624
c
https://orcid.org/0000-0002-8417-8505
d
https://orcid.org/0000-0002-3128-8030
better estimates than those traditionally obtained by
a single sensor, since more observations are avail-
able, and also it is possible to avoid the negative ef-
fect in the estimation caused by observations from
faulty sensors. In the real domain, there exists a wide-
ranging literature on signal processing from multisen-
sor observations affected by different uncertainties,
that frequently occur in the transmission problems.
For example, assuming missing or intermittent mea-
surements, the estimation problem has been solved in
the real field by using the centralized fusion method
(Liu et al., 2017) and the distributed fusion proce-
dure (Lin and Sun, 2016). Another common situation
consists of considering that the observations may be
updated or delayed at each instant of time (Linares-
P
´
erez et al., 2009; Liang et al., 2011). Both uncertain-
ties can be also simultaneously studied (Zhang et al.,
2021), or even include multiple packet dropouts, in
which case the last observation successfully transmit-
ted is considered if the real observation is not avail-
able (Ma and Sun, 2013).
So, the need to extend the obtained results on the
real signal estimation problems to the hypercomplex
domains arises. However, this generalization is not
an immediate extension from the real vectorial case,
due to the fact that the hypercomplex algebras lose
important properties of the algebraic operations in the
Jiménez-López, J., Fernández-Alcalá, R., Navarro-Moreno, J. and Ruiz-Molina, J.
Optimal Prediction of Tessarine Signals from Multi-sensor Uncertain Observations under Tk-Properness Conditions.
DOI: 10.5220/0011124200003271
In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2022), pages 577-584
ISBN: 978-989-758-585-2; ISSN: 2184-2809
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
577

real field. Moreover, under certain properties of the
processes involved in the system model, a reduction
in the dimension of the model is obtained, fact that it
can not be considered in the real field. Most of the es-
timation problems in the hypercomplex domains have
been studied in the quaternion space, due to the fact
that it has a Hilbert space structure, although the prod-
uct is not commutative. In the quaternion domain, the
widely linear (WL) estimation problem, that is, that
means to consider the signal and its three involutions,
has been solved under different uncertainty hypothe-
ses (Jim
´
enez-L
´
opez et al., 2017; Fern
´
andez-Alcal
´
a
et al., 2020). Assuming C
η
-property conditions, the
processing is called semi-widely linear (SWL) one,
and it considers the signal and the involution over the
pure unit quaternion (Navarro-Moreno et al., 2019).
The signal estimation problems in the tessarine
domain have been less studied since it is not a Hilbert
space. Recently, a metric has been defined in the
tessarine domain that satisfies the necessary proper-
ties to guarantee the existence and uniqueness of the
least-squares linear estimator (Navarro-Moreno et al.,
2020). Moreover, from analogy with the quaternion
domain, T
1
and T
2
-properness conditions have been
defined in the tessarine domain, getting so a reduc-
tion in the dimension of the model (Navarro-Moreno
et al., 2020; Navarro-Moreno and Ruiz-Molina, 2021;
Fern
´
andez-Alcal
´
a et al., 2021).
In this paper, the least-squares linear one-stage
prediction problem is approached by considering a
state-pace model with uncertain observations pro-
vided by multiple sensors. Under correlation hy-
potheses on the additive noises and T
k
-properness
conditions, a recursive prediction algorithm is pro-
posed. A numerical simulation example illustrates the
theoretical results obtained.
2 MODEL FORMULATION
In this section, the tessarine state-space model is pre-
sented by means of the signal and multi-sensor ob-
servation equations. Notation R and T will be used
to the set of real numbers and tessarine field, respec-
tively. Moreover, unless otherwise stated, all the ran-
dom variables are assumed to have zero-mean.
Let us consider a n-dimensional tessarine random
signal vector x(t) ∈ T
n
, which is given as follows
x(t) = x
r
(t) + ηx
η
(t) + η
′
x
η
′
(t) + η
′′
x
η
′′
(t), (1)
where x
ν
(t) ∈ R
n
, for ν = r, η,η
′
,η
′′
, are n-
dimensional real random signal vector and {η, η
′
,η
′′
}
denote the imaginary units satisfying the following
identities:
ηη
′
= η
′′
, η
′
η
′′
= η, η
′′
η = −η
′
,
η
2
= −η
′ 2
= η
′′ 2
= −1.
Let us assume the following state equation for x(t):
x(t + 1) = F
1
(t)x(t) + F
2
(t)x
∗
(t) + F
3
(t)x
η
(t)
+ F
4
(t)x
η
′′
(t) + u(t), t ≥ 0,
(2)
where F
i
(t) ∈ T
n×n
, for i = 1, . . . , 4, are tessarine de-
terministic matrices of dimension n × n, x
ν
(t), for
ν = ∗,η,η
′′
, are the corresponding conjugations of the
tessarine signal in (1), defined as follows
x
∗
(t) = x
r
(t) − ηx
η
(t) + η
′
x
η
′
(t) − η
′′
x
η
′′
(t),
x
η
(t) = x
r
(t) + ηx
η
(t) − η
′
x
η
′
(t) − η
′′
x
η
′′
(t),
x
η
′′
(t) = x
r
(t) − ηx
η
(t) − η
′
x
η
′
(t) + η
′′
x
η
′′
(t),
and u(t) ∈ T
n
is a tessarine white noise with pseudo
variance matrix Q(t).
Consider that the signal x(t) is estimated from
the observations provided by m sensors, denoted by
y
(i)
(t) ∈ T
n
, for i = 1, . . . , m, satisfying the following
observation equation:
y
(i)
(t) = γ
(i)
r
(t) ◦ x
r
(t) + ηγ
(i)
η
(t) ◦ x
η
(t)
+ η
′
γ
(i)
η
′
(t) ◦ x
η
′
(t) + η
′′
γ
(i)
η
′′
(t) ◦ x
η
′′
(t)
+ v
(i)
(t), t ≥ 1,
(3)
where ◦ denotes the Hadamard product, and v
(i)
(t) ∈
T
n
is a tessarine white noise with pseudo variance ma-
trix R
(i)
(t). Moreover, for each sensor i = 1, . . . , m,
and ν = r, η, η
′
,η
′′
, γ
(i)
ν
(t) is a n-dimensional vec-
tor whose components, γ
(i)
j,ν
(t), are Bernoulli ran-
dom variables with known parameters p
(i)
j,ν
(t). So, if
γ
(i)
ν, j
(t) = 1, then the component y
(i)
j,ν
(t) contains sig-
nal and noise, and in contrast, if it takes the value 0,
then the corresponding observation component con-
tains only noise.
Let us assume that for each sensor i = 1,...,m,
and ν = r, η, η
′
,η
′′
, the Bernoulli random variables in
γ
(i)
ν
(t) are independent of those in γ
(i)
ν
(s), for s ̸= t.
Moreover, v
(i)
(t) is independent of v
( j)
(t) for i, j =
1,...,m, with i ̸= j. The additive noises are corre-
lated, E
h
u(t)v
(i)
H
(t)
i
= S
(i)
(t) (where H denotes the
Hermitian operator), and P
0
denotes the pseudo vari-
ance matrix of the signal at the initial state. Finally,
let us consider that x(0) and the noises {u(t);t ≥ 0},
{v
(i)
(t);t ≥ 1} and {γ
(i)
ν
(t);t ≥ 1}, for ν = r, η, η
′
,η
′′
,
i = 1, . . . , m, are mutually independent.
From equations (2) and (3), the following aug-
mented state-space model can be obtained
¯
x(t + 1) =
¯
Φ(t)
¯
x(t) +
¯
u(t), t ≥ 0,
¯
y
(i)
(t) = D
γ
(i)
(t)
¯
x(t) +
¯
v
(i)
(t), t ≥ 1,
(4)
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
578

where
¯
a(t) =
h
a
T
(t),a
∗
T
(t),a
η
T
(t),a
η
′′
T
(t)
i
T
, for a =
x,u,y
(i)
,v
(i)
, where T denotes the transpose operator,
¯
Φ(t) =
F
1
(t) F
2
(t) F
3
(t) F
4
(t)
F
∗
2
(t) F
∗
1
(t) F
∗
4
(t) F
∗
3
(t)
F
η
3
(t) F
η
4
(t) F
η
1
(t) F
η
2
(t)
F
η
′′
4
(t) F
η
′′
3
(t) F
η
′′
2
(t) F
η
′′
1
(t)
,
D
γ
(i)
(t) = T
n
diag(γ
(i)
r
(t))T
H
n
,
with γ
(i)
r
(t) =
h
γ
(i)
r
T
(t),γ
(i)
η
T
(t),γ
(i)
η
′
T
(t),γ
(i)
η
′′
T
(t)
i
T
,
diag(γ
(i)
r
(t)) denotes a diagonal matrix with
the elements γ
(i)
r
(t) on the main diagonal, and
T
n
=
1
2
A ⊗ I
n
, with
A =
1 η η
′
η
′′
1 −η η
′
−η
′′
1 η −η
′
−η
′′
1 −η −η
′
η
′′
,
and I
n
the identity matrix of dimension n.
The pseudo variance matrices of the additive
noises
¯
u(t) and
¯
v
(i)
(t) in (4) are denoted by
¯
Q(t) and
¯
R
(i)
(t), respectively. Moreover, E
h
¯
u(t)
¯
v
(i)
H
(s)
i
=
¯
S
(i)
(t)δ
t,s
, where δ denotes the Kronecker delta func-
tion, and E [
¯
x(0)
¯
x
H
(0)] =
¯
P
0
.
2.1 T
k
-Properness Conditions
The T
k
-properness concept, for k = 1, 2, has been
recently defined (Navarro-Moreno et al., 2020;
Navarro-Moreno and Ruiz-Molina, 2021), and it is
related with the fact that some of the pseudo corre-
lation functions of the signal with its conjugations
vanish. This property reduces the dimension of the
augmented state model and, hence, the computational
burden necessary to carry out the estimations de-
creases.
The pseudo autocorrelation function of the ran-
dom signal x(t) ∈ T
n
is defined as Γ
x
(t,s) =
E [x(t)x
H
(s)], ∀t,s ∈ Z (Z denotes the set of integer),
and the pseudo cross correlation function of the ran-
dom signals x(t) ∈ T
n
1
and y(t) ∈ T
n
2
is defined as
Γ
xy
(t,s) = E [x(t)y
H
(s)], ∀t,s ∈ Z.
A random signal x(t) ∈ T
n
is said to be:
· T
1
-proper, if, and only if,
Γ
xx
∗
(t,s) = Γ
xx
η
(t,s) = Γ
xx
η
′′
(t,s) = 0,
· T
2
-proper, if, and only if,
Γ
xx
η
(t,s) = Γ
xx
η
′′
(t,s) = 0,
for all t, s ∈ Z. Similarly, two random signals x(t) ∈
T
n
1
and y(t) ∈ T
n
2
are:
· cross T
1
-proper, if, and only if,
Γ
xy
∗
(t,s) = Γ
xy
η
(t,s) = Γ
xy
η
′′
(t,s) = 0,
· cross T
2
-proper, if, and only if,
Γ
xy
η
(t,s) = Γ
xy
η
′′
(t,s) = 0,
for all t, s ∈ Z. Finally, x(t) and y(t) are jointly T
1
-
proper (respectively, jointly T
2
-proper) if, and only if,
they are T
1
-proper (respectively, T
2
-proper) and cross
T
1
-proper (respectively, cross T
2
-proper).
For the model described in equation (4), the fol-
lowing T
k
-properness conditions can be established:
1. If x(0) and u(t) are T
1
-proper, and
¯
Φ(t) is a block
diagonal matrix of the form
¯
Φ(t) = diag
F
1
(t),F
∗
1
(t),F
η
1
(t),F
η
′′
1
(t)
,
then x(t) is T
1
-proper. If additionally p
(i)
j,ν
(t) ≡
p
(i)
j
(t), for all i = 1, . . . , m, j = 1, . . . , n, ν =
r, η, η
′
,η
′′
,t ∈ Z, v
(i)
(t) is T
1
-proper, and u(t) and
v
(i)
(t) are cross T
1
-proper, then x(t) and y
(i)
(t)
are jointly T
1
-proper. Under these conditions,
Π
γ
(i)
(t) = E
h
D
γ
(i)
(t)
i
= I
4
⊗Π
(i)
1
(t), i = 1, . . . , m,
with
Π
(i)
1
(t) = diag
p
(i)
1,r
(t),..., p
(i)
n,r
(t)
, i = 1, . . . , m.
(5)
2. Analogously, if x(0) and u(t) are T
2
-proper, and
¯
Φ(t) is a block diagonal matrix of the form
¯
Φ(t) = diag
Φ
2
(t),Φ
η
2
(t)
,
with
Φ
2
(t) =
F
1
(t) F
2
(t)
F
∗
2
(t) F
∗
1
(t)
, (6)
then x(t) is T
1
-proper. If additionally p
(i)
j,r
(t) =
p
(i)
j,η
(t) and p
(i)
j,η
′
(t) = p
(i)
j,η
′′
(t), i = 1, . . . , m, j =
1,...,n,t ∈ Z, v
(i)
(t) is T
2
-proper, and u(t) and
v
(i)
(t) are cross T
2
-proper, then x(t) and y
(i)
(t)
are jointly T
2
-proper. In that case,
Π
γ
(i)
(t) = diag
Π
(i)
2
(t),Π
(i)
2
(t)
, i = 1, . . . , m,
with
Π
(i)
2
(t) =
1
2
"
Π
(i)
+
(t) Π
(i)
−
(t)
Π
(i)
−
(t) Π
(i)
+
(t)
#
, i = 1, . . . , m,
(7)
Optimal Prediction of Tessarine Signals from Multi-sensor Uncertain Observations under Tk-Properness Conditions
579

and
Π
(i)
+
(t) = diag
p
(i)
1,r
(t) + p
(i)
1,η
′
(t),...
..., p
(i)
n,r
(t) + p
(i)
n,η
′
(t)
,
Π
(i)
−
(t) = diag
p
(i)
1,r
(t) − p
(i)
1,η
′
(t),...
..., p
(i)
n,r
(t) − p
(i)
n,η
′
(t)
,
for i = 1, . . . , m.
2.2 T
k
-Proper System Model
Under T
k
-properness conditions, a reduction in the di-
mension of the system model described in (4) is ob-
tained. Next the new situations are described.
· In the T
1
-proper scenario. The processes
¯
x(t),
¯
u(t)
¯
y
(i)
(t),
¯
v
(i)
(t) and
¯
Φ(t), are substituted
by x
1
(t) ≜ x(t), u
1
(t) ≜ u(t), y
(i)
1
(t) ≜ y
(i)
(t),
v
(i)
1
(t) ≜ v
(i)
(t) and Φ
1
(t) ≜ F
1
(t). The pseudo
variance and cross-covariance matrices of the
noises are given by Q
1
(t) = Q(t), R
(i)
1
(t) = R
(i)
(t)
and S
(i)
1
(t) = S
(i)
(t). The observation equation in
(4) is now expressed as follows
y
(i)
1
(t) = D
γ
(i)
1
(t)
¯
x(t) + v
(i)
1
(t), t ≥ 1
where
D
γ
(i)
1
(t) = T
1
diag
γ
(i)
r
(t)
T
H
n
, i = 1, . . . , m,
with
T
1
=
1
2
1 η η
′
η
′′
⊗ I
n
. (8)
Then,
Π
γ
(i)
1
(t) = E
h
D
γ
(i)
1
(t)
i
=
h
Π
(i)
1
(t),0
n×3n
i
, (9)
where Π
(i)
1
(t) is given in (5), and 0
n×3n
represents
the n × 3n zero matrix.
· In the T
2
-proper scenario. Now the pro-
cesses
¯
x(t),
¯
u(t)
¯
y
(i)
(t),
¯
v
(i)
(t) and
¯
Φ(t), are
substituted by x
2
(t) ≜ [x(t), x
H
(t)]
T
, u
2
(t) ≜
[u(t),u
H
(t)]
T
, z
(i)
2
(t) ≜
h
z
(i)
(t),z
(i)
H
(t)
i
T
, v
(i)
2
(t) ≜
h
v
(i)
(t),v
(i)
H
(t)
i
T
and Φ
2
(t) (defined in (6)). The
pseudo variance and cross-covariance matrices
of the noises are denoted by Q
2
(t), R
(i)
2
(t) and
S
(i)
2
(t). The reduced observation equation is now
expressed as
y
(i)
2
(t) = D
γ
(i)
2
(t)
¯
x(t) + v
(i)
2
(t), t ≥ 1
where
D
γ
(i)
2
(t) = T
2
diag
γ
(i)
r
(t)
T
H
n
, i = 1, . . . , m,
with
T
2
=
1
2
1 η η
′
η
′′
1 −η η
′
−η
′′
⊗ I
n
, (10)
and
Π
γ
(i)
2
(t) = E
h
D
γ
(i)
2
(t)
i
=
h
Π
(i)
2
(t),0
2n×2n
i
, (11)
where Π
(i)
2
(t) is given in (7).
3 OPTIMAL PREDICTION
ALGORITHM
In this section, the optimal one-stage prediction prob-
lem of the signal x(t) from all the observations
provided by the m sensors is addressed, under T
k
-
properness conditions. So, denoting by
⃗
y(t) the vec-
tor formed by the observations from all the sensors,
that is,
⃗
y(t) =
h
¯
y
(1)
T
(t),...,
¯
y
(m)
T
(t)
i
T
, our aim is to
obtain recursive formulas to obtain the optimal least-
squares linear estimator of the signal x(t) from the ob-
servations until previous instant,
{
⃗
y(1),...,
⃗
y(t − 1)
}
.
The observation equation is now expressed as follows
⃗
y(t) =
¯
D
⃗
γ
(t)Λ
n
¯
x(t) +
⃗
v(t), t ≥ 1
where
¯
D
⃗
γ
(t) = ϒ
n
diag
⃗
γ
r
j
(t)
ϒ
H
n
, with ϒ
n
= I
m
⊗T
n
,
and
⃗
γ
r
j
(t) =
γ
(1)
r
T
j
(t),...,γ
(m)
r
T
j
(t)
T
, Λ
n
= 1
m
⊗ I
4n
,
where 1
m
denotes the m × 1 vector with all its el-
ements 1, and
⃗
v(t) =
h
¯
v
(1)
T
(t),...,
¯
v
(m)
T
(t)
i
T
. The
pseudo variance and cross-covariance matrices of the
additive noises are given by:
⃗
R(t) = E [
⃗
v(t)
⃗
v
H
(t)] =
diag
¯
R
(1)
(t),...,
¯
R
(m)
(t)
, E [
¯
u(t)
⃗
v
H
(s)] =
⃗
S(t)δ
ts
,
with
⃗
S(t) =
h
¯
S
(1)
(t),...,
¯
S
(m)
(t)
i
.
However, under T
k
-properness conditions, for k =
1,2, a reduction of the dimension in the state-space
model is obtained; so, assuming this property, the ob-
servation equation is given as follows
y
k
(t) =
¯
D
⃗
γ
k
(t)Λ
n
¯
x(t) +
⃗
v(t), t ≥ 1,
(12)
where
¯
D
⃗
γ
k
(t) = ϒ
k
diag(
⃗
γ
r
(t))ϒ
H
n
, with ϒ
k
= I
m
⊗ T
k
,
and T
k
for k = 1, 2 are given in (8) and (10), respec-
tively. Moreover,
¯
Π
⃗
γ
k
(t) =E
h
¯
D
⃗
γ
k
(t)
i
=diag
Π
γ
(1)
k
(t),...,Π
γ
(m)
k
(t)
,
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
580

with Π
γ
(i)
k
(t), for i = 1, . . . , m, given in (9) and (11) for
k = 1, 2, respectively.
Next result proposes a recursive algorithm to
obtain the optimal one-stage predictor under T
k
-
properness conditions, denoted by
ˆ
x
T
k
(t|t − 1), as
well as its mean squared error.
Theorem 1. Under T
k
-properness conditions, for k =
1,2, in the model described by equations (2) and (12)
and the hypotheses assumed, the optimal one-stage
predictor,
ˆ
x
T
k
(t|t − 1), is obtained by extracting the
first n components of
ˆ
x
k
(t|t − 1), which is recursively
calculated as follows
ˆ
x
k
(t|t − 1) =Φ
k
(t − 1)
ˆ
x
k
(t − 1|t − 1)
+ H
k
(t − 1)ε
k
(t − 1), t ≥ 2,
where
ˆ
x
k
(t − 1|t − 1) satisfies this formula
ˆ
x
k
(t − 1|t − 1) =
ˆ
x
k
(t − 1|t − 2)
+ L
k
(t − 1)ε
k
(t − 1), t ≥ 2,
with initial conditions
ˆ
x
k
(1|0) =
ˆ
x
k
(0|0) = 0
kn
.
The matrices H
k
(t) and L
k
(t) are calculated as:
H
k
(t) = S
k
(t)Ω
−1
k
(t) and L
k
(t) = Θ
k
(t)Ω
−1
k
(t) ,
where S
k
(t) = [S
(1)
k
(t),...,S
(m)
k
(t)], with S
(i)
k
(t), for
i = 1, . . . , m, defined in Section 2.2.
The innovations, ε
k
(t), are obtained as follows
ε
k
(t) = y
k
(t) − Π
k
(t)Λ
k
ˆ
x
k
(t|t − 1), t ≥ 1,
where Λ
k
= 1
m
⊗ I
kn
, and Π
k
(t) =
diag
Π
(1)
k
(t),...,Π
(m)
k
(t)
, with Π
(i)
k
(t) for k = 1, 2,
are given in (5) and (7), respectively.
The matrices Θ
k
(t) satisfy this relation
Θ
k
(t) = P
k
(t|t − 1)Λ
T
k
Π
k
(t), t ≥ 2;
Θ
k
(1) = 1
T
m
⊗ D
k
(1)Π
k
(1),
with
D
k
(1) =
I
kn
,0
kn×(4−k)n
¯
Φ(0)
¯
P(0)
¯
Φ
H
(0) +
¯
Q(0)
×
I
kn
,0
kn×(4−k)n
T
.
The pseudo covariance matrix of the innovations,
Ω
k
(t), is obtained from this expression
Ω
k
(t) = ϒ
k
Cov(
⃗
γ
r
(t)) ◦
ϒ
H
n
Λ
n
¯
D(t)Λ
T
n
ϒ
n
ϒ
H
k
+ Π
k
(t)Ξ
k
P
k
(t|t − 1)Ξ
T
k
Π
k
(t)
+ R
k
(t), t ≥ 2,
Ω
k
(1) = I
m
⊗ Π
k
(1)D
k
(1)Π
k
(1) + R
k
(1),
where
¯
D(t) can be recursively calculated by this for-
mula
¯
D(t) =
¯
Φ(t − 1)
¯
D(t − 1)
¯
Φ
H
(t − 1) +
¯
Q(t − 1), t ≥ 1,
¯
D(0) =
¯
P
0
.
and R
k
(t) = diag
R
(1)
k
(t),...,R
(m)
k
(t)
, with R
(i)
k
(t),
for i = 1, . . . , m, defined in Section 2.2.
Finally, the prediction error covariance matrices,
P
T
k
(t|t − 1), are calculated from P
k
(t|t − 1), which
satisfy the following equation
P
k
(t|t − 1) = Φ
k
(t − 1)P
k
(t − 1|t − 1)Φ
H
k
(t − 1)
− Φ
k
(t − 1)Θ
k
(t − 1)H
H
k
(t − 1)
− H
k
(t − 1)Θ
H
k
(t − 1)Φ
H
k
(t − 1)
− H
k
(t − 1)Ω
k
(t − 1)H
H
k
(t − 1)
+ Q
k
(t − 1), t ≥ 1
where P
k
(t −1|t −1) can be recursively obtained from
this relation
P
k
(t − 1|t − 1) = P
k
(t − 1|t − 2)
− Θ
k
(t − 1)Ω
−1
k
(t − 1)
× Θ
H
k
(t − 1), t ≥ 1,
with initial conditions
P
k
(0|0) =
I
kn
,0
kn×(4−k)n
P
0
I
kn
,0
kn×(4−k)n
T
,
and P
k
(1|0) = D
k
(1).
4 NUMERICAL EXAMPLE
Our goal in this section is to illustrate the performance
of the proposed estimator by considering the follow-
ing tessarine state-space model with five sensors:
x(t + 1) = f x(t) + u(t), t ≥ 0,
y
(i)
(t) = γ
(i)
r
(t)x
r
(t) + ηγ
(i)
η
(t)x
η
(t) + η
′
γ
(i)
η
′
(t)x
η
′
(t)
+ η
′′
γ
(i)
η
′′
(t)x
η
′′
(t) + v
(i)
(t), t ≥ 1,
for i = 1, . . . , 5,, where f = 0.9 + 0.3η + 0.1η
′
+
0.1η
′′
∈ T,
n
γ
(i)
ν
(t);t ≥ 1
o
ν=r,η,η
′
,η
′′
are sequences of
Bernoulli random variables with parameters p
(i)
ν
(t),
and u(t) and v
(i)
(t) are tessarine Gaussian noises.
Moreover, the real covariance matrix of u(t) is
given as follows
E
h
u
r
(t)u
r
T
(s)
i
=
0.9 0 b 0
0 a 0 b
b 0 0.9 0
0 b 0 a
δ
ts
, (13)
with u
r
(t) =
u
r
(t),u
η
(t),u
η
′
(t),u
η
′′
(t)
T
.
The additive observation noises, v
(i)
(t), are de-
fined as
v
(i)
(t) = α
i
u(t) + w
(i)
(t),
Optimal Prediction of Tessarine Signals from Multi-sensor Uncertain Observations under Tk-Properness Conditions
581
with α
1
= 0.5,α
2
= 0.3,α
3
= 0.4,α
4
= 0.6,α
5
= 0.2,
and w
(i)
(t) tessarine zero-mean white Gaussian noises
with real covariance matrices
E
h
w
(i)
r
(t)w
(i)
r
T
(s)
i
= diag (β
i
,β
i
,β
i
,β
i
)δ
ts
,
with w
(i)
r
(t) =
h
w
(i)
r
(t),w
(i)
η
(t),w
(i)
η
′
(t),w
(i)
η
′′
(t)
i
T
and
β
1
= 3, β
2
= 7, β
3
= 15, β
4
= 21, β
5
= 25.
It is also assumed that the variance matrix of the
real initial state is given as follows
E
h
x
r
(0)x
r
T
(0)
i
=
c 0 d 0
0 4 0 d
d 0 c 0
0 d 0 4
, (14)
with x
r
(0) =
x
r
(0),x
η
(0),x
η
′
(0),x
η
′′
(0)
T
.
Finally, the mutual independence hypothesis be-
tween the initial state and the multiplicative and addi-
tive noises is also considered.
The performance of the proposed estimator is
analysed in both T
1
and T
2
-proper scenarios by tak-
ing different values of the Bernoulli parameters, as-
suming that these are constant in time, that is, for each
i = 1, . . . , 5, ν = r, η, η
′
,η
′′
, p
(i)
ν
(t) = p
(i)
ν
, for all t.
4.1 T
1
-Proper Case
In order to guarantee the T
1
-properness conditions, let
us consider a = 0.9, b = 0.3 in (13), and c = 4, d =
−2.5 in (14). Moreover, p
(i)
ν
= p
(i)
, for ν = r, η, η
′
η
′′
.
Under these assumptions, x(t) and y
(i)
(t), i = 1, . . . , 5
are jointly T
1
-proper.
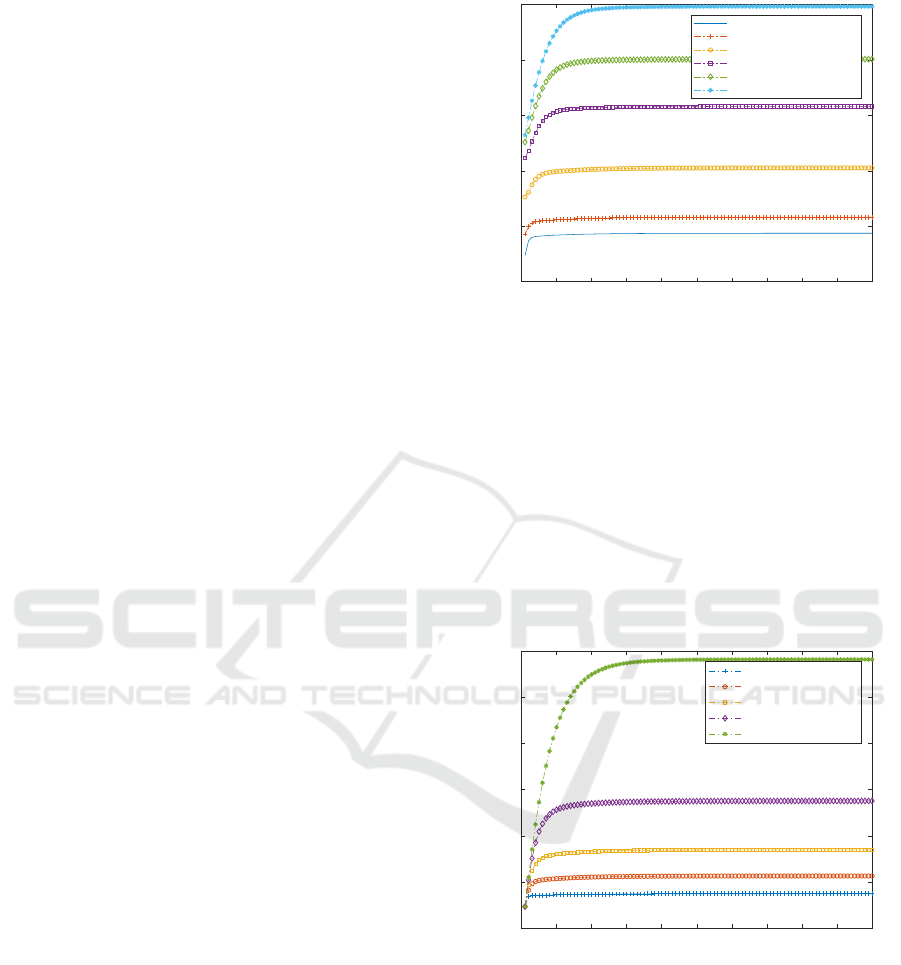
Firstly, in order to show the effectiveness of the
proposed estimator in comparison with the one-stage
predictor obtained at each sensor, the error variances
are computed in Figure 1 for the following values of
the Bernoulli parameters: Sensor 1, p
(1)
= 0.9; Sen-
sor 2, p
(2)
= 0.7; Sensor 3, p
(3)
= 0.5; Sensor 4,
p
(4)
= 0.3; Sensor 5, p
(5)
= 0.1. It is observed that
the performance of the proposed estimator, that uses
the observations provided for all the sensors, is bet-
ter than any of the estimators obtained from the ob-
servations of each sensor. Note that the probability
that the observation at each sensor contains the sig-
nal decreases from Sensor 1 to 5, that is, at Sensor 1,
it is more probable that the observation contains sig-
nal and noise, but the opposite happens at Sensor 5,
it is more probable that the observation contains only
noise. As it is observed, as this probability decreases,
from Sensor 1 to 5, the error variances increases, and
then the accuracy of the estimator is worse.
Now, in order to show the performance of the pro-
posed estimator with regards to the Bernoulli proba-
bilities, the error variances are computed for different
0 10 20 30 40 50 60 70 80 90 100
t
0
5
10
15
20
25
Prediction error variance
Error variances for all sensors
Error variances for Sensor 1
Error variances for Sensor 2
Error variances for Sensor 3
Error variances for Sensor 4
Error variances for Sensor 5
Figure 1: Prediction error variances for the proposed es-
timator and for the one obtained from the observations at
Sensor i, for i = 1,.. . ,5.
values of them. Specifically, the same probability has
been taken in all the sensors, decreasing from 0.9 to
0.1, that is, the following situations have been con-
sidered: p
(i)
= 0.9,∀i; p
(i)
= 0.7,∀i; p
(i)
= 0.5,∀i;
p
(i)
= 0.3, ∀i and p
(i)
= 0.1, ∀i. As before, it is ob-
served that as the Bernoulli probabilities of all the
sensors decrease, which means that it is more prob-
able that the observations contain more noise and less
signal, the error variances increase and hence, the es-
timations are worse.
0 10 20 30 40 50 60 70 80 90 100
t
0
5
10
15
20
25
30
Prediction error variance
Error variances for p
(i)
=0.9
Error variances for p
(i)
=0.7
Error variances for p
(i)
=0.5
Error variances for p
(i)
=0.3
Error variances for p
(i)
=0.1
Figure 2: Prediction error variances for the proposed esti-
mator taking the same probability in all the sensors.
4.2 T
2
-Proper Case
Consider the values a = 0.6, b = 0.3 in (13), and c =
3, d = −2.5 in (14), and also, p
(i)
r
= p
(i)
η
and p
(i)
η
′
=
p
(i)
η
′′
. So, x(t) and y
(i)
(t), i = 1, . . . , 5 are jointly T
2
-
proper.
Now, under T
2
-properness conditions, analogous
situations to Figures 1 and 2, have been illustrated
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
582
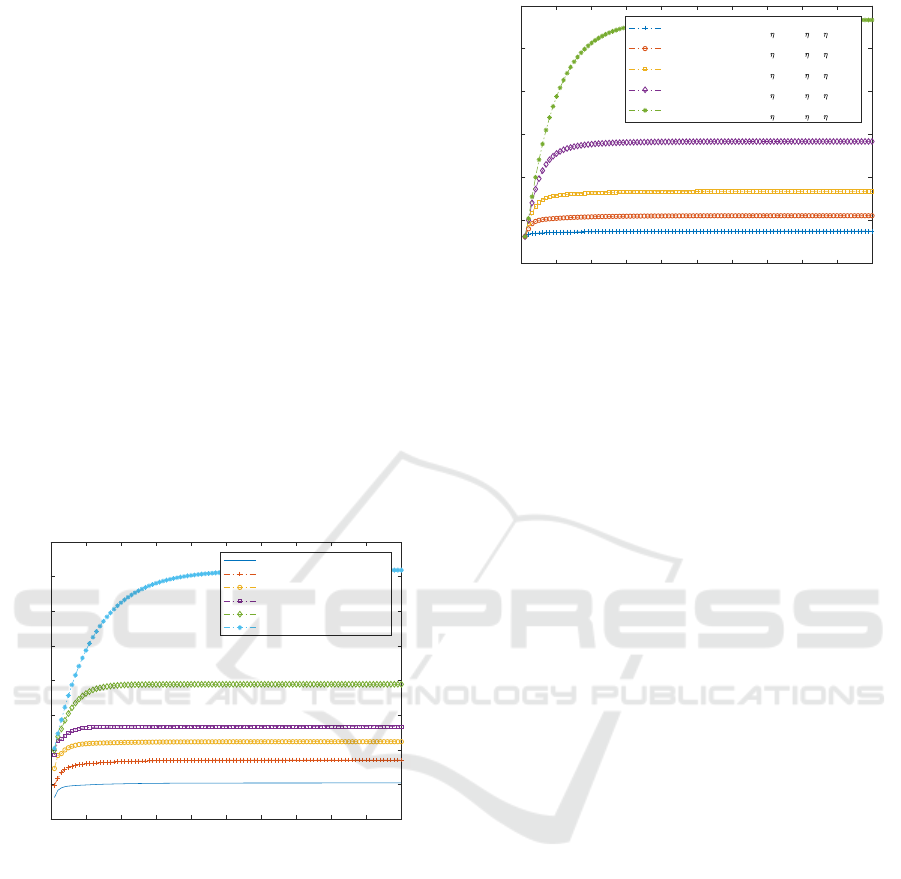
in Figures 3 and 4, respectively. For this purpose,
in Figure 3, the prediction error variances for the
proposed estimator which uses the observations of
all the sensors, as well as for the estimator at each
sensor, are shown by taking the following proba-
bility values: Sensor 1,
p
(1)
r
, p
(1)
η
′
= (0.9,0.8);
Sensor 2,
p
(2)
r
, p
(2)
η
′
= (0.7, 0.6); Sensor 3,
p
(3)
r
, p
(3)
η
′
= (0.5, 0.4); Sensor 4,
p
(4)
r
, p
(4)
η
′
=
(0.3,0.2); Sensor 5,
p
(5)
r
, p
(5)
η
′
= (0.1, 0.05).
And, in Figure 4, the prediction error variances
for the proposed estimator have been displayed by
considering the same probability in all the sensors
at these situations:
p
(i)
r
, p
(i)
η
′
= (0.9, 0.8), ∀i;
p
(i)
r
, p
(i)
η
′
= (0.7,0.6),∀i;
p
(i)
r
, p
(i)
η
′
=
(0.5,0.4),∀i;
p
(i)
r
, p
(i)
η
′
= (0.3, 0.2), ∀i; and
p
(i)
r
, p
(i)
η
′
= (0.1,0.05),∀i. Analogous considera-
tions to that of Figures 1 and 2, in the T
1
-proper case,
are deduced.
0 10 20 30 40 50 60 70 80 90 100
t
0
5
10
15
20
25
30
35
40
Prediction error variance
Error variances for all sensors
Error variances for Sensor 1
Error variances for Sensor 2
Error variances for Sensor 3
Error variances for Sensor 4
Error variances for Sensor 5
Figure 3: Prediction error variances for the proposed es-
timator and for the one obtained from the observations at
Sensor i, for i = 1,.. . ,5.
5 CONCLUSIONS
Recently, the scientific community has shown an in-
creasing interest in the use of hypercomplex algebras
to model many experimental phenomena, as well as
in assuming that the observations of the signal to be
estimated are provided by multiple sensors. The first
aim is due to the fact that the hypercomplex domains
are more appropriate than the real field to describe
a great amount of physical variables and also, un-
der certain properness conditions, a reduction in the
computational burden involved in the estimation al-
0 10 20 30 40 50 60 70 80 90 100
t
0
5
10
15
20
25
30
Prediction error variance
Error variances for p
(i)
r
=p
(i)
=0.9,p
(i)
´
=p
(i)
´´
=0.8
Error variances for p
(i)
r
=p
(i)
=0.7,p
(i)
´
=p
(i)
´´
=0.6
Error variances for p
(i)
r
=p
(i)
=0.5,p
(i)
´
=p
(i)
´´
=0.4
Error variances for p
(i)
r
=p
(i)
=0.3,p
(i)
´
=p
(i)
´´
=0.2
Error variances for p
(i)
r
=p
(i)
=0.1,p
(i)
´
=p
(i)
´´
=0.05
Figure 4: Prediction error variances for the proposed esti-
mator taking the same probability in all the sensors.
gorithms is attained. The last goal is due to the fact
that the use of multisensor observations yields better
estimations.
The generalization of the signal processing results
obtained in the real field to the hypercomplex domain
is not immediate. Some of the main properties of the
algebraic operations in the real field are not valid in
the hypercomplex domains. Until now, most of the
results obtained on hypercomplex signal estimation
have been approached in the quaternion domain, since
it has a Hilbert space structure. However, commuta-
tive hypercomplex algebras such as tessarines, pro-
vide a suitable structure to extend the main results
in the real and complex field to this one. Although
the tessarine domain is not a Hilbert space, a norm
has been recently defined to guarantee the existence
and uniqueness of the optimal least squares linear es-
timator (Navarro-Moreno et al., 2020). From this last
result, the tessarine signal estimation problem is cur-
rently an important research object.
ACKNOWLEDGEMENTS
This work has been supported in part by I+D+i project
with reference number 1256911, under ‘Programa
Operativo FEDER Andaluc
´
ıa 2014-2020’, Junta de
Andaluc
´
ıa, and Project EI-FQM2-2021 of ‘Plan de
Apoyo a la Investigaci
´
on 2021-2022’ of the Univer-
sity of Ja
´
en.
REFERENCES
Abbasi-Kesbi, R. and Nikfarjam, A. (2018). A miniature
sensor system for precise hand position monitoring.
IEEE Sensors Journal, 18(6):2577–2584.
Ahmad, Z., Hashim, S., Rokhani, F., Al-Haddad, S., Sali,
Optimal Prediction of Tessarine Signals from Multi-sensor Uncertain Observations under Tk-Properness Conditions
583

A., and Takei, K. (2021). Quaternion model of
higher-order rotating polarization wave modulation
for high data rate m2m lpwan communication. Sen-
sors, 21:383.
Ajdaroski, M., Ashton-Miller, J., Baek, S., Shahshahani,
P., and Esquivel, A. (2022). Testing a quater-
nion conversion method to determine human three-
dimensional tibiofemoral angles during an in vitro
simulated jump landing. Journal of biomechanical en-
gineering, 144(4):041002.
Augereau, B. and Carr
´
e, P. (2017). Hypercomplex poly-
nomial wavelet-filter bank transform for color image.
Signal Processing, 136:16–28.
Bayro-Corrochano, E., Solis-Gamboa, S., Altamirano-
Escobedo, G., Lechuga-Gutierres, L., and Lisarraga-
Rodriguez, J. (2021). Quaternion spiking and quater-
nion quantum neural networks: Theory and appli-
cations. International Journal of Neural Systems,
31(2):2050059.
Celsi, M., Scardapane, S., and Comminiello, D. (2020).
Quaternion neural networks for 3d sound source lo-
cation in reverberant environments. In MLSP’2020,
IEEE international Workshop on Machine Learning
for Signal Processing, page 9231809.
Fern
´
andez-Alcal
´
a, R. M., Navarro-Moreno, J., Jim
´
enez-
L
´
opez, J. D., and Ruiz-Molina, J. C. (2020). Semi-
widely linear estimation algorithms of quaternion sig-
nals with missing observations and correlated noises.
Journal of the Franklin Institute, 357:3075–3096.
Fern
´
andez-Alcal
´
a, R. M., Navarro-Moreno, J., and Ruiz-
Molina, J. C. (2021). T-proper hypercomplex cen-
tralized fusion estimation for randomly multiple sen-
sor delays systems with correlated noises. Sensors,
21(17):5729.
Grakhova, E., Abdrakhmanova, G., Schmidt, S., Vino-
gradova, I., and Sultanov, A. (2019). The quadrature
modulation of quaternion signals for capacity upgrade
of high-speed fiber-optic wireless communication sys-
tems. In SPIE - The Society for Optical Engineering,
page 11146.
Jim
´
enez-L
´
opez, J. D., Fern
´
andez-Alcal
´
a, R. M., Navarro-
Moreno, J., and Ruiz-Molina, J. C. (2017). Widely
linear estimation of quaternion signals with intermit-
tent observations. Signal Processing, 136:92–101.
Liang, J., Shen, B., Dong, H., and Lam, J. (2011). Robust
distributed state estimation for sensor networks with
multiple stochastic communication delays. Interna-
tional Journal of Systems Science, 42(9):1459–1471.
Lin, H. and Sun, S. (2016). Distributed fusion estima-
tor for multi-sensor asynchronous sampling systems
with missing measurements. IET Signal Processing,
10(7):724–731.
Linares-P
´
erez, J., Carazo, A. H., Caballero-
´
Aguila, R., and
Jim
´
enez-L
´
opez, J. D. (2009). Least-squares linear fil-
tering using observations coming from multiple sen-
sors with one- or two-step random delay. Signal Pro-
cessing, 89(10):2045–2052.
Liu, W.-Q., Wang, X.-M., and Deng, Z.-L. (2017). Robust
centralized and weighted measurement fusion kalman
estimators for uncertain multisensor systems with lin-
early correlated white noises. Information Fusion,
35:11–25.
Ma, J. and Sun, S. (2013). Centralized fusion estimators
for multisensor systems with random sensor delays,
multiple packet dropouts and uncertain observations.
IEEE Sensors Journal, 13:1228–1235.
Navarro-Moreno, J., Fern
´
andez-Alcal
´
a, R. M., Jim
´
enez-
L
´
opez, J. D., and Ruiz-Molina, J. C. (2019). Widely
linear estimation for multisensor quaternion systems
with mixed uncertainties in the observations. Journal
of the Franklin Institute, 356:3115–3138.
Navarro-Moreno, J., Fern
´
andez-Alcal
´
a, R. M., Jim
´
enez-
L
´
opez, J. D., and Ruiz-Molina, J. C. (2020). Tessarine
signal processing under the T-properness condition.
Journal of the Franklin Institute, 357(14):10099–
10125.
Navarro-Moreno, J. and Ruiz-Molina, J. C. (2021). Wide-
sense markov signals on the tessarine domain. a
study under properness conditions. Signal Processing,
183:108022.
Ortolani, F., Comminiello, D., and Uncini, A. (2016). The
widely linear block quaternion least mean square al-
gorithm for fast computation in 3d audio systems. In
MLSP’2016, IEEE international Workshop on Ma-
chine Learning for Signal Processing, page 7738842.
Qu, Y. and Yi, W. (2022). Three-dimensional obsta-
cle avoidance strategy for fixed-wing uavs based on
quaternion method. Applied Sciences, 12(3):955.
Wei, W., Yu, J., Wang, L., Hu, C., and Jiang, H.
(2022). Fixed/preassigned-time synchronization of
quaternion-valued neural networks via pure power-
law control. Neural Networks, 146:341–349.
Yang, L., Miao, J., and Kou, K. (2022). Quaternion-based
color image completion via logarithmic approxima-
tion. Information Sciences, 588:82–105.
Zhang, J., Gao, S., Li, G., Xia, J., Qi, X., and Gao,
B. (2021). Distributed recursive filtering for multi-
sensor networked systems with multi-step sensor de-
lays, missing measurements and correlated noise. Sig-
nal Processing, 181:107868.
Zheng, J., Wang, H., and Pei, B. (2020). Uav attitude mea-
surement in the presence of wind disturbance. Signal,
Image and Video Processing, 14(8):1517–1524.
ICINCO 2022 - 19th International Conference on Informatics in Control, Automation and Robotics
584
