
Using the Silhouette Coefficient for Representative Search of
Team Tactics in Noisy Data
Friedemann Schwenkreis
a
Baden-Wuerttemberg Cooperative State University, Paulinenstr. 50, 70565 Stuttgart, Germany
Keywords: Data Science, Clustering, Team Handball, Tactics Recognition.
Abstract: Automatically recognizing team tactics based on spatiotemporal data is challenging. Deep Learning
approaches have been proposed in this area but require a tremendous amount of manual work to create training
and test data. This paper presents a clustering approach to reduce the needed manual effort significantly. A
method is described to transform the spatiotemporal data into a canonical form that allows to efficiently apply
clustering techniques. Since noise cannot be avoided in the given application context, the silhouette coefficient
is applied to filter clusters considered to be noisy in a cluster technique independent way. Then, a variant of
the silhouette coefficient is introduced as an indicator regarding the overall cluster model quality which allows
to select the optimal clustering technique as well as the optimal set of cluster technique parameters for the
given application context.
1 INTRODUCTION
The application area of team tactics recognition in
team sports uses the players’ positions and data
mining methods to automatically detect reoccurring
tactical moves of teams. It has been proposed to use
deep-learning-based classification techniques like
(T)CNNs to solve this task (Schwenkreis, 2018a).
However, the challenge of classification approaches
is to find enough training and test data to extract a
model with sufficient quality.
In the field of team sports like team handball, this
means, that large sets of position data need to be
manually labelled by experts before the actual model
extraction can be performed. Particularly in case of
deep learning models, this results in a tremendous
amount of manual effort and requires a lot of time,
because the experts need to watch videos that
correspond with the positional data in order to be able
to classify a move that happens in a given interval.
This paper presents an approach to reduce the
manual effort significantly. The concept of
representative search based on clustering is used to
identify representatives of a group of similar team
moves. When a representative is manually classified,
then it is assumed that a whole cluster of similar team
a
https://orcid.org/0000-0003-4072-0582
moves belongs to the same class. Thus, not each team
move needs to be classified manually to get the
training and test data but only one per group.
Alternatively, the labelled clustering model can be
used directly to “classify” new data.
The results presented in this paper have been
derived from data of five handball games from which
272 situations have been extracted that potentially
contain a team tactic. Section 2 describes the method
to transform the available data such that clustering
methods can be applied. Section 3 introduces the
notion of similarity that is used in case of team tactics.
In section 4 the approaches of handling noise and
selecting an appropriate clustering method are
presented. Section 5 concludes the paper with a
summary of the results and an outlook on future work.
2 CANONICAL POSITIONAL
DATA
The starting point of the analysis presented in this
paper is data from team handball matches. To be more
specific, it is data of matches of the first German
handball league (HBL), collected using the player
tracking system of Kinexon® (Kinexon, 2017). This
Schwenkreis, F.
Using the Silhouette Coefficient for Representative Search of Team Tactics in Noisy Data.
DOI: 10.5220/0011100600003269
In Proceedings of the 11th International Conference on Data Science, Technology and Applications (DATA 2022), pages 193-202
ISBN: 978-989-758-583-8; ISSN: 2184-285X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
193

means that the data consists of the 3D coordinates of
the sensors carried by the players between the
shoulders, as well as of the coordinates of a sensor
built into the ball. Since the elevation is not of interest
in the context of the presented work, the data is
reduced to 2D coordinates ranging roughly from (0,0)
to (40,20), which are the dimensions of a team
handball field in meters.
The positional data is generated every 50 ms by
the Kinexon system and each component of the
coordinates is provided with an accuracy of three
digits after the decimal separator. However, the actual
spatial accuracy of the Kinexon system is lower and
the location of a player might be given with an overall
accuracy of about 10 cm. Thus, the data has been
reduced to a single digit after the decimal separator.
2.1 Basic Definitions
A team positional state (tpos) at a certain point in time
is an ordered set of up to seven player coordinates,
depending on the number of players who are currently
allowed on the field (there might be suspended
players which reduces the number of players on the
field) plus the coordinates of the ball. The match
positional state (mpos) at a given point in time is the
union of the two team positional states (the ball
coordinates are contained only once in the mpos).
A team tactical move (ttm) can then be defined as
an ordered set of team positional states of the same
team during a certain timeframe contained in a match.
Based on observations of real-world data, it has been
decided to use 5.5 seconds as the timeframe for a team
tactical move. Given the Kinexon rate of 20 pairs of
coordinates per second, a team tactical move is
represented by 880 pairs of coordinates in the data.
Finally, we can define an individual positional
state as the coordinates of a player or the ball at a
specific point in time and a trajectory of a ttm as the
extract of all individual positional states of a single
player or the ball from a team tactical move in the
temporal order of the contained coordinates.
2.2 Challenges of Data Preparation
There are four basic challenges to get comparable
data of team tactical moves collected from team
handball matches:
To be able to compare the coordinate values of
ttms, the start and end of a ttm needs to be
determinable and deterministic.
There is no fixed schema for the origin of the
coordinates of different matches. The origin
depends on the location of the table of the
timekeeper of a match. The left lower corner
from the timekeeper’s perspective has always
the coordinates (0,0).
Team tactics in team handball are mostly
restricted to the half of the field with the goal
against which an attack happens. However, this
part of the field changes with every attack.
Thus, there are attacks in which most x-
coordinates are significantly below 20m and
there are attacks with most x-coordinates
significantly above 20m.
Sides are switched after half time break. This
results in a change of attack coordinates from a
player’s perspective: If the same player has for
instance attack coordinates in the range of (0,0)
to (4, 5) in one half, a typical left-wing player,
the same player has attack coordinates in the
range of (36, 15) to (40,20) in the second half.
The order of the players’ coordinates of a team
tactical move is arbitrary.
In the following the approaches to overcome these
challenges are presented.
2.3 Timeframes of Team Tactical
Moves
Particularly, the first challenge presented in the
previous section, to have well-defined points in time
when team tactical moves start and end, requires
using knowledge beyond the positional data. For that
purpose, additional match data is used (Schwenkreis,
2018b).
Since a ttm is only of interest in the context of this
work if an attempt to score is made, the timeframe of
a ttm is defined as follows:
The end of a team tactical move is defined as
the last tpos in which the ball is closest to the
attempting player before the recorded
timestamp of the attempt.
The start of a team tactical move is 109 tposs
before the last tpos. Thus, a team tactical move
consists of 110 tposs.
2.4 Transformation of Coordinates
The second, third and fourth challenges described in
section 2.2 denote the problem of “changing”
coordinate values. Even if the “tactical” position of a
player is the same with respect to his or her team, the
values of his/her coordinates can be different. Thus, a
concept is needed to avoid the changing origins and
changing playing directions.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
194

Again, the additional match data in combination
with handball specific knowledge help to transform
the data into a canonical format. Team tactics in team
handball are used to generate situations in which an
attempt has a high scoring probability. If the opponent
team is playing with a goalkeeper, then the high
scoring probability will only be achieved, if the
attempting player is in the same half of the field as the
opponent’s goal. There are cases in which the
attempting player is not in the half of the opponent’s
goal, but these cases are irrelevant for team tactics
because in these cases the opponent’s goalkeeper is
usually not present (or just about to return to the goal)
and thus no explicit tactics are applied.
Based on this observation, we can state that in
case of the relevant cases in the context of this work,
the attempting player needs to have a x-coordinate
between 0 and 20, given that the opponent’s goal has
a x-coordinate of 20. If the x-coordinate of the
attempting player is above 20, then we assume that
we need to transform the coordinates of all players
and the ball. I.e., we need a point reflection of the
coordinates using the centre of the field.
As a result, all coordinates are transformed such
that there are only attempts against the goal “of the
right side of field” (from the point of view of the
timekeeper of a match). Thus, the previously
described challenges two to four of section 2.2 are
resolved.
2.5 Sort Order of Player Coordinates
The concept of representing ttms as vectors has been
introduced previously (Schwenkreis, 2018a). In this
previous work, it has been proposed to use
classification based on deep learning. To overcome
the problem of “non-deterministic” ttm vectors, all
permutations of players of the ttm representing vector
were used to train the deep learning model. Now, if
clustering is used rather than classification, it does not
make sense to generate all permutations because it
would significantly distort the clustering result. It is
rather necessary to generate an order of players that is
well-defined.
From the point of view of team tactics there is no
need for a sort order across teams. It is rather
sufficient to have a well-defined sort order for each
team. Furthermore, it is irrelevant which sort order is
chosen as long as the sorting results in the same
sequence of player coordinates for all ttms that are to
be compared. Furthermore, it is important to ensure
that the vector position of a specific player remains
the same across all tposs of a ttm.
To determine the vector position of a player in
tposs, a heuristic is used that is derived from the
handball method to number the players by their
assigned offense position on the field: The “left-
wing” player is numbered one, the “half-left” player
two and so on. Finally, the goalkeeper gets number 7
and the ball number 8.
The offense position of players is defined by the
line-up data which is part of the additional match data
mentioned in section 2.3. For example, the player
who has been assigned to the “left-wing” position in
the line-up is assigned the vector position one as his
or her “coordinate index” in a tpos.
Some special cases need to be considered with
this approach: There might be the case when two
players with the same “nominal” offense position are
on the field, which would result in the same
coordinate index and an empty pair of coordinates in
the tpos. In this case, the y-coordinate in the starting
position of the tpos is used to determine the
coordinate index. There are three groups that are
handled separately: The two players with positions on
the left side, the three players in the mid and the two
players with positions of the right side.
In case of the offensive team, the player with
the highest y-coordinate is treated as the player
with the position defined in the line-up record.
Then the next empty coordinate slot in the same
player group of the tpos with a higher index is
used for the second highest y-coordinate.
In case of the defending team, the player with
the lowest y-coordinate is treated as the player
with the position defined in the line-up record.
The next empty coordinate slot in the player
group of the tpos with a lower index is used for
the player with the second lowest y-coordinate.
Cases with more than two players with the
same assigned position in the line-up are not
covered at this point.
3 TEAM MOVEMENT
SMIILARITY
Like classification clustering belongs to the family of
segmentation methods. The basic difference between
the two approaches is that clustering needs an explicit
notion of similarity (or distance), while classification
derives this notion implicitly based on the attribute
values of records with the same class label. Since the
assignment of class labels is very costly in the given
application scenario, the use of a non-supervised
approach based on clustering is proposed. Thus, a
Using the Silhouette Coefficient for Representative Search of Team Tactics in Noisy Data
195

suitable notion of similarity needs to be selected or
defined respectively.
Clustering to find groups of similar tactics means
to find groups of similar ttms. Hence, we need to
define a notion of similarity for ttms. However, a ttm
consists of the discretized trajectories of involved
players and the ball. Thus, the similarity of two ttms
depends on the similarity of the contained individual
projections of the ttms.
3.1 Distance of Trajectories
Since the trajectories described by the individual
projections of a ttm consist of the spatiotemporal data
of the players and thus of an ordered sequence of 2D-
coordinates, it makes sense to define the similarity of
two trajectories based on a distance criterion. It is
easy to calculate the Euclidean Distance of the 110
points that are part of an individual projection of a
ttm, but there are multiple options for the aggregated
distance of the two (Kumar, Chhabra, & Kumar,
2014).
Given the total order of the points of the
trajectories based on the timestamps of the
coordinates and the fact that all trajectories consist of
the same number of points, the Discrete Fréchet
Distance D has been selected as the aggregated
distance of two trajectories (Aronov, Har-Peled,
Knauer, Wang, & Wenk, 2006). Given two
trajectories A and B of the same time interval T, D is
the maximum Euclidean Distance d of any two points
p
A
(t) and p
B
(t) contained in A and B at any given point
in time t of the interval T.
𝐷(
𝐴
,𝐵)=max
∀
∈
𝑑(𝑝
(
𝑡
)
,𝑝
(
𝑡
)
)
(1)
3.2 Distance of Two Sets of
Trajectories
To define the distance of two ttms, we need to
aggregate the distances of the trajectory pairs of each
contained player (and the ball). Again, there are
multiple options to aggregate these trajectory
distances and the process of identifying the optimal
aggregation function is still ongoing.
The challenge is to find an aggregation function
that matches the human perception of the similarity
of team tactical moves. There are at least some
application specific details which help to narrow
down the degree of freedom:
Goalkeepers are usually not involved in team
tactics. In fact, there are only very few tactics
that involve more than 4 players.
Having some close trajectories compensates
for far trajectories to some extent.
The ball can only be part of a team tactical
move in case of the offensive team – the
defensive team does not have the ball.
The ball moves much faster than the players
which also leads to larger differences of the
trajectories. In average, the differences of ball
trajectories are three times the differences of
the player trajectories. Hence, the trajectory
distances of the ball are multiplied with a factor
of one third to compensate for the differences
in velocity.
Overall, the distance value ΔT of two ttms, A and
B, is defined as the mean value of the trajectory
distances of the contained players A
1
to A
6
and B
1
to
B
6
respectively (see section 2.5). In case of the
offensive team, the distance of trajectories of the ball
(A
8
and B
8
) might be added to the calculation of the
mean value.
∆𝑇
.
=
1
7
𝐷
(
𝐴
,𝐵
)
+𝐷
(
𝐴
,𝐵
)
(2)
∆𝑇=
1
6
𝐷
(
𝐴
,𝐵
)
(3)
4 CLUSTERING ASPECTS
4.1 Constraints
Clustering denotes the search for groups of similar
data sets and there are quite several different
approaches to it (Xu & Tian, 2015). In the given
application context, we have constraints which limit
the applicability of some approaches.
The given trajectories might represent a team
tactical move, but they also might not contain a move
that qualifies as a real tactical move. Some attacks in
handball are finished based on individual decisions
rather than containing the coordinated move of
several players. Thus, the ttms containing an
individual move rather than a tactical move are
considered as noise in the context of clustering: They
should not be assigned to any cluster.
Furthermore, the number of played tactics is
unknown and there might be more tactics than
represented by the data set we are looking at. I.e., if
we need to specify the number of clusters upfront,
then we might have not enough clusters compared to
the number of tactics contained in our data set. As a
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
196

result, some ttms might be treated as noise or they will
be assigned to clusters which consist of records that
are not similar from a handball perspective.
On the other hand, there is the case when we
specify too many clusters. In that case we want the
clustering approach to allow empty clusters rather
than enforcing the assignment of at least one record
to each cluster.
4.2 Considered Methods
Given the constraints of section 4.1, all clustering
methods have been excluded hat require to specify the
number of clusters upfront unless empty clusters are
supported. The following three methods have been
evaluated in the described context
4.2.1 DBSCAN
A method fulfilling all described constraints is
Density-Based Spatial Clustering of Applications
with Noise or short DBSCAN (Ester, Kriegel, Sander,
& Xu, 1996). The method searches for clusters based
on the criterion that there is a certain minimum
number of close neighbours of a data point (also
denoted as node). Further points are added to the
cluster if they are direct close neighbours, or in case
they are indirect close neighbours of other
neighbouring nodes. If points do not have the
minimum number of neighbours, they are treated as
noise, i.e., they are assigned to a special noise cluster.
Two parameters of the method influence the result
of DBSCAN significantly:
The distance that is used to identify direct
neighbours.
The minimum number of neighbours that is
needed to build a cluster.
Given the two parameters, DBSCAN finds an
arbitrary number of clusters of arbitrary shape.
4.2.2 Hierarchical Clustering
Both, Divisive Hierarchical Clustering as well as
Agglomerative Hierarchical Clustering do not require
to specify the number of clusters upfront. They both
generate a hierarchy with the points of the data set at
the leaves based on the application specific distances
between the points (Murtagh & Contreras, 2012).
Then the tree representing the hierarchy can be
interpreted as a set of clusters by evaluating the links
of a certain level in the tree.
In the context of this work, the evaluation of the
links is done using the inconsistency coefficient as a
criterion (Martinez & Martinez, 2005). The
inconsistency coefficient can be calculated for each
link in the tree, which are potential clusters. When a
link has an inconsistency coefficient that is lower than
a specified maximum inconsistency coefficient, it is
accepted as a cluster. Child links of the identified link
in the hierarchy are not further evaluated.
With this approach there might be clusters
consisting of single points of the data set, because the
leave level has an inconsistency coefficient of 0 and
thus qualifies in case no parent link has qualified
before. These clusters are treated as noise. In the
context of this paper only the agglomerative variant
of hierarchical clustering is further evaluated.
4.2.3 Self-Organizing Maps
Self-Organizing Maps (SOMs) or Kohonen Networks
belong to the family of artificial neural networks (van
Hulle, 2012). They require the specification of the
length and width of a rectangular shaped two-
dimensional output area of neurons. The length and
width are expressed as the number of neurons of each
dimension and the product of the two corresponds to
the maximum number of clusters that can be
distinguished. SOMs “tolerate” empty clusters in the
sense that it does not negatively impact the model
when no input record is depicted on a certain output
neuron.
SOMs are very flexible in terms of the cluster
shapes which can be identified but they do not take
into account the notion of an application specific
distance. On the other hand, they have several
parameters that allow to adjust the SOMs for specific
needs as:
The number of output neurons in each
dimension.
The size of the neighbourhood of a neuron.
The layer topology function.
The distance function to calculate the distance
between the weights of neurons and input sets.
As in case of hierarchical clustering, SOMs might
generate clusters consisting of single records. To be
specific, the clustering model depicts just a single
record on a certain output neuron when the trained
network is applied to the training set. These “single”
records are treated as noise.
4.3 Cluster Model Quality
4.3.1 Basic Criterion
A very important aspect of clustering is the evaluation
of the extracted clustering model. Particularly when
comparing clustering methods or parameter settings
Using the Silhouette Coefficient for Representative Search of Team Tactics in Noisy Data
197
of clustering methods, a metric is needed that allows
to rank the approaches and settings thereof.
There is a multitude of so-called validity indexes
for clustering (Saitta, Raphael, & Smith, 2008). In the
scope of this work, we selected the silhouette
coefficient as the base criterion for the following
reasons:
It is calculated based on the application specific
notion of distance.
The computational complexity is low if
distances of the records of the dataset can be
pre-calculated – which is possible in our case.
It takes into account the cluster density as well
as the distance to other clusters. The silhouette
coefficient ranges between -1 and +1 and
values below 0 are indicating a bad cluster
association of a record.
It can be calculated for each point of the data
set, for a cluster and for an overall cluster
model. The silhouette coefficient of a cluster is
the mean value of the silhouette coefficients of
the contained records. The silhouette
coefficient of a model is the mean value of all
records.
Furthermore, the visualization of silhouette
coefficients as a silhouette plot provides a simple
means for the intuitive evaluation of a clustering
model (MathWorks, 2022).
However, there are drawbacks that come with the
silhouette coefficient. Since the aggregation of the
silhouette values of clusters is done based on
calculating the average of the silhouette coefficients
of the contained records, the silhouette coefficient is
well suited for clusters with a convex shape but has
limitations in case of concavely shaped clusters.
Furthermore, having a model consisting of a single
cluster, results in a silhouette coefficient of 1 which
indicates a perfect clustering model.
When data is present that has been identified as
noise, the calculation of the silhouette coefficient
needs to be adjusted accordingly. Noise should not
influence the values of the silhouette coefficients.
Thus, special noise clusters and contained data must
be excluded before the calculation of the silhouette
coefficients.
4.3.2 Weighted Silhouette Coefficient
There are multiple extreme cases when varying the
parameters of clustering models:
All records are treated as noise and no cluster
is identified. The silhouette coefficient is not
defined in this case.
Only a single cluster with a low number of
records is identified, while all other records are
treated as noise. Then, the silhouette coefficient
reaches its maximum.
All non-noise records are part of a single
cluster. This is like the sphere surrounding all
data points Again, the silhouette coefficient
becomes maximal in this case.
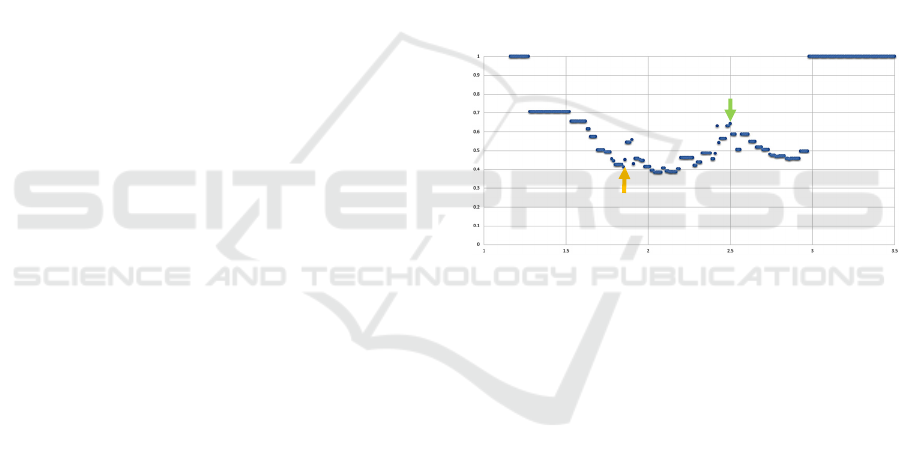
Particularly in case of the DBSCAN clustering
method, all three cases can be created easily when
varying the minimum distance parameter for
identifying neighbours. As depicted in Figure 1, there
is only noise until a value of approximately 1.3 and
no silhouette coefficient value is depicted. Then the
first cluster is identified, and the silhouette coefficient
becomes 1. With increasing values of the minimum
distance, the value of the silhouette coefficient varies
until around a minimum distance of 3. Then all
records are considered to belong to the same cluster
and the silhouette coefficient jumps back to 1.
Figure 1: Distribution of DBSCAN silhouette coefficient
values over a variation of the minimum distance parameter,
defence data.
When looking for the optimal distance to be used
with the DBSCAN method, the direct interpretation
of the silhouette coefficient does not help. In the case
depicted in Figure 1, the local maximum around 2.5
seems to be the optimal point (indicated by the green
arrow), but there is no general rule that allows to
determine it.
Therefore, knowledge of the application level has
been used to find an appropriated indicator. When
searching for team tactics in terms of similar ttms, we
need to compromise between a clustering model with
an optimal silhouette coefficient and the number of
clusters that are detected. It is known upfront that
there must be more than one cluster. In fact, we know
for sure that there are more than 10 clusters.
Thus, we use a weighted silhouette coefficient ws
as the validity index of a clustering model M. The
weighted silhouette coefficient is defined as the
product of the silhouette coefficient s(M) of a
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
198

clustering model and the number of identified clusters
c contained in M:
𝑤𝑠
(
𝑀
)
=𝑠
(
𝑀
)
|
𝑐
|
,𝑐
∈𝑀
(4)
An alternative weighting with the number of
records that are contained in the set of identified
clusters has been discarded, because it also becomes
maximal when all records are grouped into a single
cluster.
Figure 2: Distribution of the weighted DBSCAN silhouette
coefficient values over a variation of the minimum distance
parameter, defence data.
Figure 2 shows the distribution of the weighted
silhouette coefficient given the same variation of the
minimum distance parameter as depicted in Figure 1.
The global maximum value of ws
is reached at a
minimum distance of 1.85 (indicated by the orange
arrow) which is significantly different from the
minimum distance of the local maximum of the non-
weighted silhouette coefficient value: 2.5 (green
arrow in Figure 2). It is surprising that the non-
weighted silhouette coefficient has a local minimum
at 1.85 (orange arrow in Figure 1) while the weighted
silhouette coefficient has a maximum and that the
weighted silhouette coefficient has a local minimum
at 2.5 while the silhouette coefficient has a maximum.
We do not have an explanation for this phenomenon
at this point.
4.3.3 Advanced Handling of Noise
As mentioned in section 4.2, not all considered
clustering techniques have an explicit notion of noise.
Even worse, the SOM method cannot even apply the
application specific distance function to identify
noise. Nevertheless, it must be ensured, that noise
does not impact the clustering model, whether the
technique that generated the model considers an
application specific distance function or not.
It has already been described in section 4.2 that
clusters consisting of a single record are treated as
noise although they have a silhouette coefficient of 1.
Furthermore, the application area is only interested in
having records being assigned to a cluster if there is a
minimum certainty that the record belongs to the
cluster. As mentioned in the introduction, we are
looking for representatives and each record of a
cluster should be a valid representative for a whole
cluster. Hence, a minimum silhouette coefficient is
required for all records. Records with a silhouette
coefficient less than the minimum record-level
silhouette coefficient are treated as noise as well. The
results presented in this paper have been calculated
using a record-level minimum silhouette coefficient
of 0.1.
In addition to the record-level minimum
silhouette coefficient there is also a minimum cluster-
level silhouette coefficient which must be greater than
the minimum record-level silhouette coefficient to
have an effect. If a cluster has a silhouette coefficient
less than the minimum cluster-level silhouette value,
then all records of the cluster are treated as noise. A
cluster-level minimum silhouette coefficient of 0.3
has been used in the context of this paper.
Overall, the following “filtering” steps are applied
after the computation of a clustering model to derive
the final clustering model and to calculate the overall
silhouette coefficient:
Records not having neighbours in the same
cluster are removed (including the clusters).
Silhouette coefficients are calculated.
Records with a low silhouette coefficient are
removed (see above) and records not having
neighbours in the same cluster are removed.
Silhouette coefficients are recalculated.
Clusters with a low silhouette coefficient and
contained records are removed (see above).
Silhouette coefficients are recalculated, and the
overall ws of the model is calculated.
4.4 Comparing Clustering Methods
Since offense ttms and defence ttms differ
significantly, it cannot be assumed that the same
clustering method is optimal in both cases. Hence, the
method selection needs to be done two times, for the
offense case and the defence case.
The selection of the clustering technique to
generate the model for the representative search has
been a two-phased process:
In phase 1 the optimal parameter setting for
each considered method was searched
In phase 2 the previously found optimal
parameter settings were used to select the
optimal clustering technique.
In both phases the weighted silhouette coefficient is
used as the decisive factor.
Using the Silhouette Coefficient for Representative Search of Team Tactics in Noisy Data
199
4.4.1 Investigated Parameter Settings
DBSCAN Parameters
In case of the DBSCAN method there are two major
parameters: The minimum distance of neighbour
points and the minimum number of points required to
build a cluster. The latter parameter was set to two
because it was assumed that some ttms were only
contained two times in the data given the available
amount of data (see introduction). Hence, only
variations of the minimum distance had to be
evaluated.
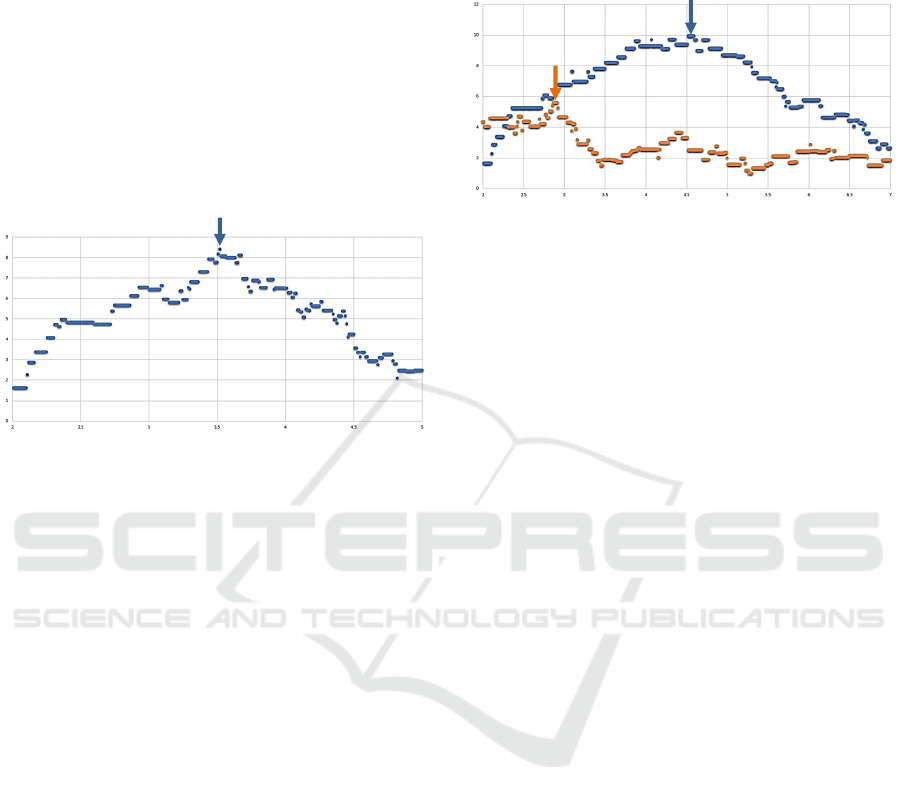
Figure 3: DBSCAN: weighted silhouette coefficient,
offense data.
To get an idea of the needed variations, the
minimum, and the maximum distances of all
available ttms have been calculated. It turned out that
the defence ttms have a closer distance than the
offense ttms and that we reach the maximum
weighted silhouette coefficient relatively early. In the
end it was sufficient to cover the range of [1,3.5] in
case of the defence ttms and the range of [2,5] in case
of the offense ttms. The resulting weighted silhouette
coefficient in the defence case has been depicted in
Figure 2. Figure 3 shows the corresponding values of
the offense case.
Hierarchical Clustering Parameters
The agglomerative hierarchical clustering itself does
not have any parameters and generates a complete
tree which is based on the application specific
distance function. The complete link criterion has
been used to generate the trees described in this paper.
On the other hand, the interpretation of the tree as a
clustering model is somewhat arbitrary. The approach
described in this paper uses the MATLAB™
inconsistency coefficient to determine the links in the
tree that are considered to be clusters of the clustering
model (Martinez & Martinez, 2005).
The inconsistency coefficient is a means for the
dissimilarity of the records belonging to a link. The
lower the value, the more similar are the records that
are connected to the link. From that perspective, the
inconsistency coefficient is similar to the minimum
distance parameter of the DBSCAN method.
Figure 4: Hierarchical Clustering: weighted silhouette
coefficients for offense (blue) and defence (orange) data.
There is no general rule regarding the range of the
inconsistency coefficient. It needs to be determined
for each case. Figure 4 depicts the variations of the
inconsistency coefficient in the interval [2,7]. The
orange curve depicts the variations in case of defence
ttms, while the blue curve covers the offense ttms. The
arrows in the corresponding colour indicate the
maximum weighted silhouette coefficients for both
cases.
SOM
As introduced in section 4.2.3 there are several
parameters that can be set for self-organizing maps.
So far, a systematic evaluation of all parameter
settings is not available. Particularly, we cannot tell at
this point how the amount of available data will
impact the parameter settings that have been
evaluated so far. However, several settings have been
tested and for the results presented in this paper the
following settings are used:
A rectangular shaped two-dimensional net of
10 x 15 neurons.
100 initial coverings steps.
The grid topology function.
The Euclidean distance function to calculate
the distance between records and the weights of
the neurons.
300 epochs to train the network.
The automated tests are done based on variations
of the number of neighbouring neurons contained in
the initial neighbourhood. Figure 5 shows the
weighted silhouette coefficients of varying the initial
neighbourhood size between 3 and 30. Manual tests
beyond that range showed lower values of the
weighted silhouette coefficient. It is visible that there
is no “obvious” connection between the initial
neighbourhood size and the quality of the resulting
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
200
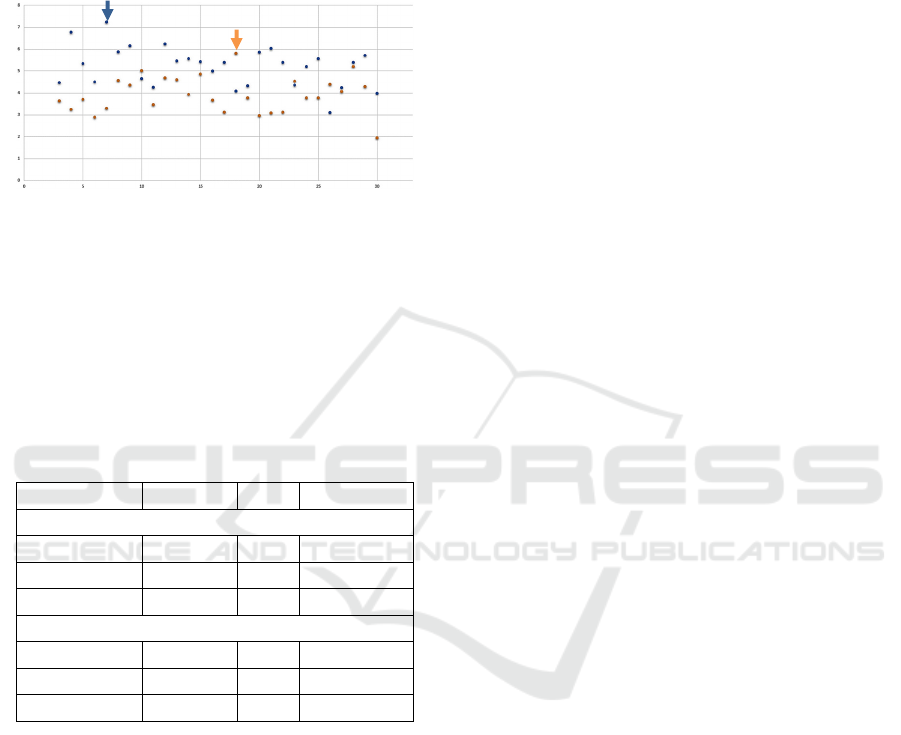
model. The points in the diagram seem to change
their value arbitrarily and further experiments are
needed to evaluate the connections between the
parameter settings and the quality of the resulting
model. The maxima are again indicated by the two
arrows in blue and orange respectively.
Figure 5: SOM: weighted silhouette coefficients for offense
(blue) and defence (orange) data.
4.4.2 Identifying the Clustering Method
After selecting the optimal parameter settings, the
silhouette coefficients of the clustering models have
been compared.
Table 1
gives an overview of the
values in case of the offense and the defence ttms
respectively.
Table 1: Comparison of model quality.
Method s |{c}| ws
Offense
DBSCAN 0.467 18 8.407
Hierarchical 0.497 20 9.943
SOM 0.452 16 7.235
Defence
DBSCAN 0.414 11 4.555
Hierarchical 0.431 13 5.599
SOM 0.415 14 5.812
The overall quality values of the cluster models in
the offense case are significantly greater than the
values of the defence case. Furthermore, the
differences of the quality indicators are significantly
larger in the offense case compared to the defence
case.
The best weighted silhouette coefficient in case of
offense ttms is achieved by Hierarchical Clustering
followed by the DBSCAN method and the Self-
Organizing Maps. In case of the defence data the
SOM has the highest weighted silhouette coefficient
followed by the Hierarchical Clustering and the
DBSCAN approach.
In both cases the Hierarchical Clustering has the
highest non-weighted silhouette coefficient, given the
optimal parameter settings with respect to the
weighted silhouette coefficient, even though the
weighted silhouette coefficient of the SOM approach
is higher in the defence case. None of the approaches
fails completely to find an appropriate clustering
model.
In conclusion, Hierarchical Clustering has been
selected to identify representatives for offense ttms,
while the SOM network is used to cluster defence
ttms.
5 RESULTS AND CONCLUSIONS
5.1 Result Summary
20 clusters spanning 47 records have been identified
using Hierarchical Clustering and a maximum
inconsistency coefficient of 4.52 in the offense case.
From an application perspective it was possible to
identify 11 different team tactical moves that were
represented by the 20 clusters.
14 clusters representing 35 records have been
identified using self-organizing maps and an initial
neighbourhood size of 18 in the defence case. The
clusters were associated with 12 different team
tactical moves by experts.
The differences between clusters that have been
associated with the same team tactical move but
belong to different clusters are still under
investigation. There seem to be only subtle
differences that are not easy to explain for human
experts at this point. Video clips based on the
trajectories of the team tactical moves have been
generated as a basis for the human classification of
representatives.
5.2 Conclusions and Outlook
It has been successfully shown that using the
silhouette coefficient as a concept to determine the
quality of cluster models even in case of clustering
methods that use a different notion of distance is
applicable and allows to compare the clustering
model. Although the silhouette coefficient is difficult
to be used directly, the weighted variant of the
coefficient can be applied easily.
The results presented in this paper must be seen as
a proof of concept rather than a complete study. The
used data are rather small in terms of the number of
extracted ttms. Extracting the ttms and subsequently
processing them using the clustering methods have
shown that the timing accuracy during recording is
crucial. As a side effect the extraction of ttms can be
used to get an indication of the quality of the recorder.
Using the Silhouette Coefficient for Representative Search of Team Tactics in Noisy Data
201

The number of identified team tactical moves
seems to be small but given the small amount of data
it is surprisingly large. From an application
perspective it is far beyond human capabilities to
identify more than 20 different team tactical moves
by the observation of just 5 matches. Furthermore,
handball experts were particularly surprised by the
identified defence tactical moves that the clustering
approach was able to differentiate.
There is still a significant number of parameter
settings that need to be evaluated systematically –
especially in case of the SOMs. Investigating the
SOM settings is particularly time consuming because
the computation of a SOM model takes about a
hundred times longer than the computation done with
other techniques that exploit pre-computed distances.
However, we are very confident that the approach
allows to avoid the need for the manual classification
of thousands of ttms to be able to train a deep learning
network. There will be data of much more matches
available soon when the handball league decides to
share positional data across teams which will allow to
generate a more comprehensive view of played
handball tactics.
ACKNOWLEDGEMENTS
I would like to thank the German Handball League
(HBL) and the teams of TVB Stuttgart, HBW
Balingen-Weilstetten and Frisch Auf! Göppingen for
the support of this work by providing spatiotemporal
data as well as scouting data of matches. Furthermore,
I would like to thank Eckard Nothdurft for
contributing scouting data and for evaluating tactical
video clips to “explain” clusters.
REFERENCES
Aronov, B., Har-Peled, S., Knauer, C., Wang, Y., & Wenk,
C. (2006). Fréchet distance for curves, revisited.
European symposium on algorithms (S. 52-63). Berlin,
Heidelberg: Springer.
Ester, M., Kriegel, H. P., Sander, J., & Xu, X. (1996).
Density-based spatial clustering of applications with
noise. Int. Conf. Knowledge Discovery and Data
Mining, 240, S. 6.
Kinexon. (2017). Real-time Performance Analytics.
Kinexon.
Kumar, V., Chhabra, J. K., & Kumar, D. (2014).
Performance evaluation of distance metrics in the
clustering algorithms. INFOCOMP Journal of
Computer Science, 13(1), S. 38-52.
Martinez, W. L., & Martinez, A. R. (2005). Exploratory
Data Analysis with MATLAB. Boca Raton, Florida:
Chapman & Hall / CRC Press.
MathWorks. (03. 02 2022). MATLAB Help Center. Von
Silhouette Plot:
https://de.mathworks.com/help/stats/silhouette.html
abgerufen
Murtagh, F., & Contreras, P. (2012). Algorithms for
hierarchical clustering: an overview. Wiley
Interdisciplinary Reviews: Data Mining and
Knowledge Discovery, 2(1).
Saitta, S., Raphael, B., & Smith, I. (2008). A
comprehensive validity index for clustering. Intelligent
Data Analysis, 12(6), S. 529-548.
Schwenkreis, F. (2018a). An Approach to use Deep
Learning to Automatically Recognize Team Tactics in
Team Ball Games. Proeedings of the 7th Conference on
Data Science, Technology and Applications. Porto:
Scitepress.
Schwenkreis, F. (2018b). A Three Component Approach
To Support Team Handball Coaches. 23rd Annual
Congress of the European College of Sport Science.
Dublin.
van Hulle, M. (2012). Self-Organizing Maps. In G.
Rozenberg, T. Bäck, & J. N. Kok, Handbook of Natural
Computing (S. 585-622). Berlin, Heidelberg: Springer.
Xu, D., & Tian, Y. (2015). A comprehensive survey of
clustering algorithms. Annals of Data Science, 2(2), S.
165-193.
DATA 2022 - 11th International Conference on Data Science, Technology and Applications
202
