
Analysis of Efficiency of Full-submerged Archimedes Screws of
Rotary-screw Propulsion Units of Snow and Swamp-going
Amphibious Vehicles
Svetlana Karaseva
1a
, Vladimir Belyakov
1b
, Vladimir Makarov
1c
and Dmitry Malahov
2d
1
Nizhny Novgorod State Technical University n.a. R.E. Alekseev, Minin Str., 24, Nizhny Novgorod, Russian Federation
2
Moscow Automobile and Road Construction State Technical University, Leningradsky prospect, 64,
Moscow, Russian Federation
Keywords: Rotary-screw Propulsion Unit, Full-submerged Archimedes Screw, Propulsive Characteristics, Snow and
Swamp-going Amphibia, Geometrical Parameters of Archimedes Screw, Performance Curves, Overwater
Characteristics, Computer Simulation.
Abstract: The paper presents results of the numerical analysis of propulsive characteristics of full-submerged
Archimedes screws of rotary-screw propulsion units of snow and swamp-going amphibious vehicles with the
most typical geometric characteristics for this class of vehicles. The received performance curves and the
pictures of visualization of interaction between water environment and Archimedes screws with different
helix angles are given. The maximum available values of efficiency determinants of Archimedes screws for
cruising and mooring modes are determined. The results of comparative analysis of efficiency of Archimedes
screws and propellers with the same operation conditions are considered. The ways to increase the efficiency
of rotary-screw propulsion units of snow and swamp-going amphibious vehicles according to the results
received are designated. The results and the conclusions obtained as part of the study could be used by
developers of amphibian with rotary-screw propulsion units to estimate and provide the overwater
characteristics.
1 INTRODUCTION
The traditional designing of water propulsion units in
shipbuilding intends the realization of specific
procedure, the main part of which is to determine the
geometrical parameters of the working body of water
propulsor with the help of performance curves of
systematical series based on results of tests in
hydrodynamic laboratories. For example, when
designing the amphibia moving afloat by the medium
of propellers the performance curves of public Troost
or Kaplan series got by shipbuilders are usually used.
The developers of amphibian vehicles with rotary-
screw propulsion units (RSP) haven’t got such
possibility. This is due to the mild interest of
shipbuilders in rotary-screw propulsors (because of
a
https://orcid.org/0000-0002-1666-777X
b
https://orcid.org/0000-0003-0203-9403
c
https://orcid.org/0000-0002-4423-5042
d
https://orcid.org/0000-0002-5706-9557
their low propulsive characteristics in comparison
with propellers) and the lack of attention of
developers and researches of amphibian with RSP to
vehicle overwater characteristics. Among the last one
it is definitely necessary to point the experimental
works of Cole (1961) and theoretical studies of Sogin
and Shapkin (2006); however, they did not conduct
full systematic studies of the RSP hydrodynamics.
2 COMPUTER SIMULATION OF
PROPELLER
To get the full relevant view of afloat performance of
the rotary-screw propulsor it is essential to perform
the enough amount of physical or simulation
438
Karaseva, S., Belyakov, V., Makarov, V. and Malahov, D.
Analysis of Efficiency of Full-submerged Archimedes Screws of Rotary-screw Propulsion Units of Snow and Swamp-going Amphibious Vehicles.
DOI: 10.5220/0011096700003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 438-444
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
experiments with different input parameters and wide
range of values of them, meanwhile the results of
computer simulation demand the verification more
than other one. Further it is planned to create the stand
to get the verification data based on the results of
physical model tests of Archimedes screws, but at this
stage of research it was decided to use computer
simulation for preliminary estimation. To estimate the
adequacy and accuracy of the results obtained it
would be a good idea to compare them with the data
of Cole research but he used too small physical model
in his experiments which always leads to inevitable
impact of scale effects, moreover, the water tests were
performed in mooring mode only, and the small
dimensions of test basin relatively to the model of
Archimedes screw led to presence of reverse flows
which skewed the results of experiment (Shapkin,
2017). Cause of this the computer model was
processed and tested on Troost series propeller with
close topology and similar performance conditions
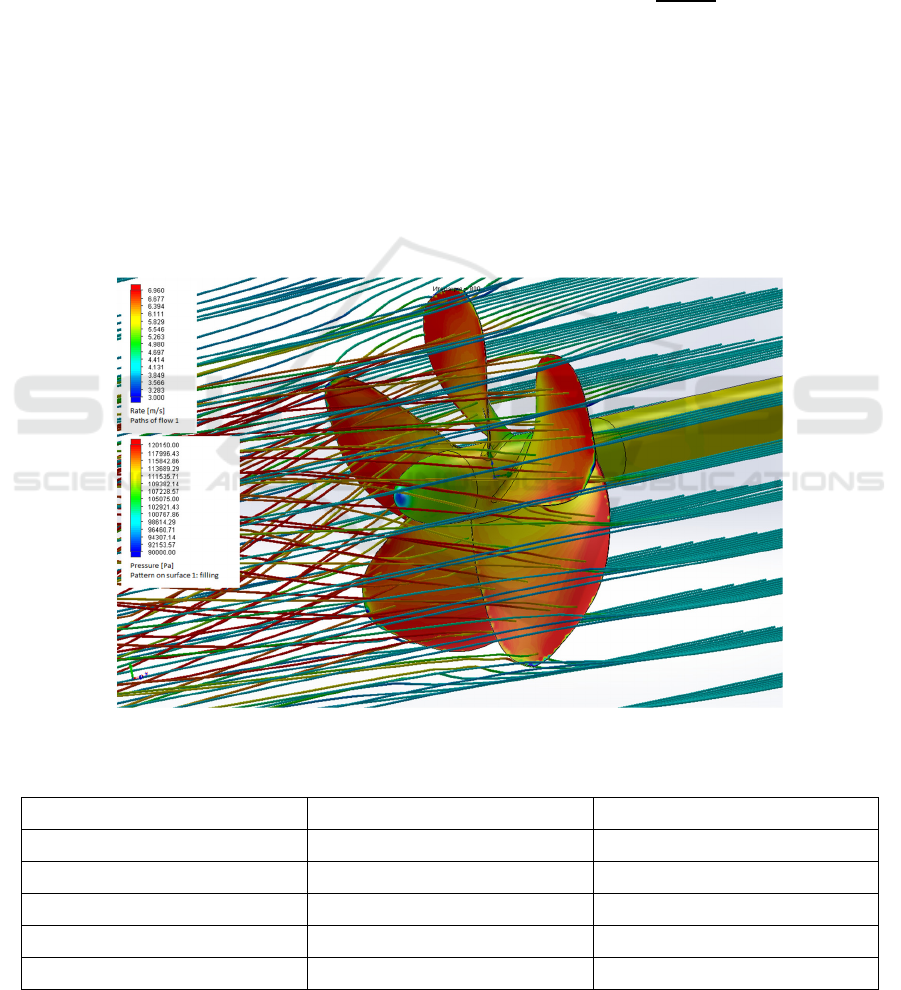
(Figure 1).
For verification the five-blade propeller with
maximum disk-area ratio of series was selected to
provide the adequate comparison. Such selection is
defined by the specificity of design of rotary-screw
propulsion unit which has rather high disk-area ratio,
in other words, the ratio of an expanded area 𝐹
of all
elements of blade system to area of circle with
diameter equal to propeller diameter:
𝜃
4𝑧 ∙ 𝐹
𝜋∙𝐷
(1
)
Propeller parameters are given in the Table 1.
Here pitch ratio is the ratio of propeller pitch – the
distance traveled by propeller in one full revolution in
translational direction – to propeller diameter; hub
ratio is the ratio of hub diameter to propeller diameter
(Basin, 1977).
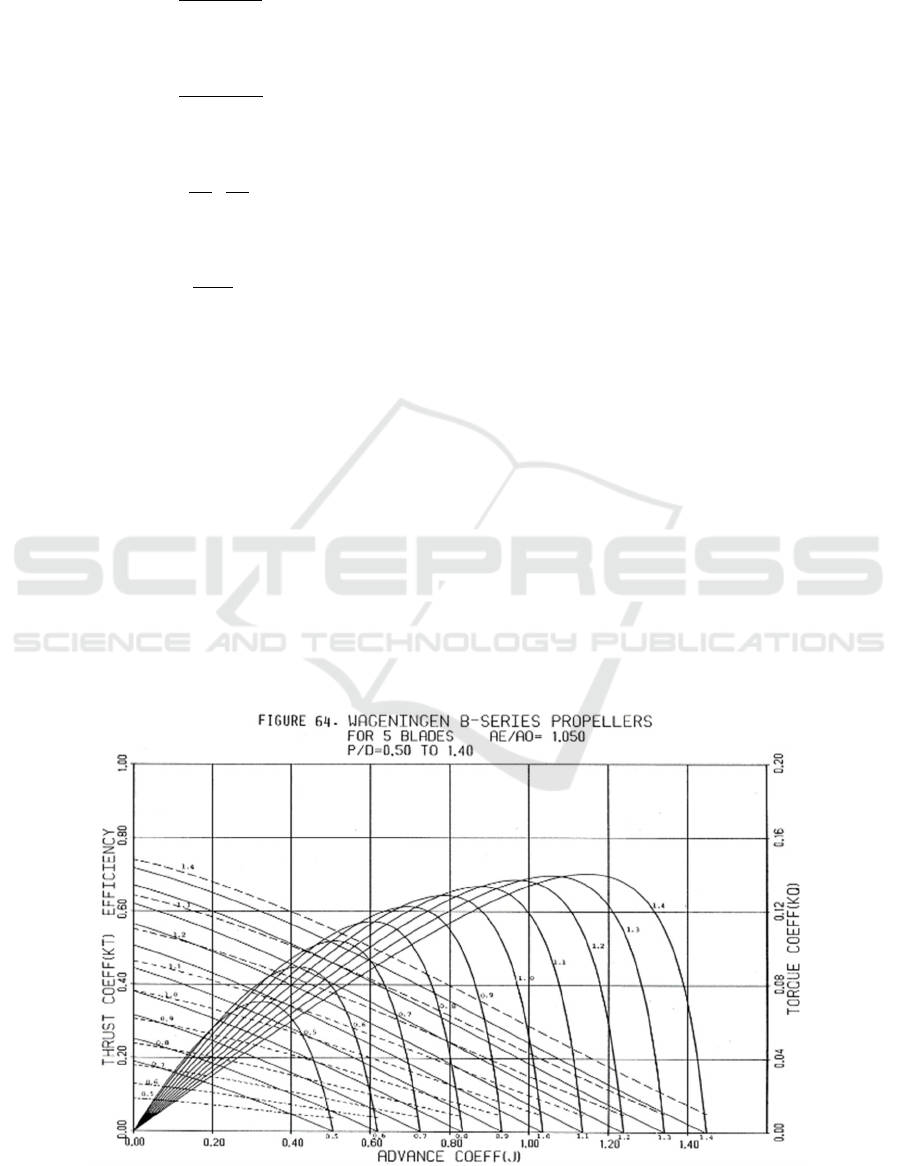
Figure 2 shows performance curves conforming
to the propeller selected (Bernitsas, 1981). The
diagrams show the correspondences of non-
dimensional coefficients built in relative coordinates.
Figure 1: Propeller B 5.105.1.4 (the visualization pattern of computer simulation: v=4 m/sec, n=500 rpm).
Table 1: Propeller parameters.
Parameter
Designation
Value
Diameter, mm
D
800
Blade number, pcs
z
5
Pitch ratio
H/D
1.4
Hub ratio
d/D
0.325
Disk-area ratio
θ
1.05
Analysis of Efficiency of Full-submerged Archimedes Screws of Rotary-screw Propulsion Units of Snow and Swamp-going Amphibious
Vehicles
439
Thrust coefficient:
𝐾
𝑇
𝜌
∙𝑛
∙𝐷
(2)
Torque coefficient:
𝐾
𝑄
𝜌
∙𝑛
∙𝐷
(3)
Propulsive coefficient (efficiency):
𝜂
𝐽
2𝜋
∙
𝐾
𝐾
(4)
Advance ratio:
𝐽
𝑣
𝑛∙𝐷
(5)
In the above formulas 𝜌 1000 𝑘𝑔/𝑚
is water
density, 𝑇 is propeller thrust (N), 𝑄 is torque of
propeller shaft (N•m), 𝑛 is propeller rotational speed
(rpm) and 𝑣
is speed of water flow (m/sec).
Performance curves essentially characterize the
performance of the particular propeller moving with
the particular rotation speed. For all geometrically
similar propellers their hydrodynamical
characteristics shown in such correspondences are
identical. The advance ratio characterizing the
performance mode uniquely determines thrust and
torque coefficients. The correspondence of
propulsive coefficient becomes equal to zero in two
end points: in the first instance there is no speed, in
the second – no thrust; the function runs up to
extremum with specific correlation of all data which
forms the range of recommended values of
parameters for even particular propeller
(https://studwood.ru, 2022/01/17).
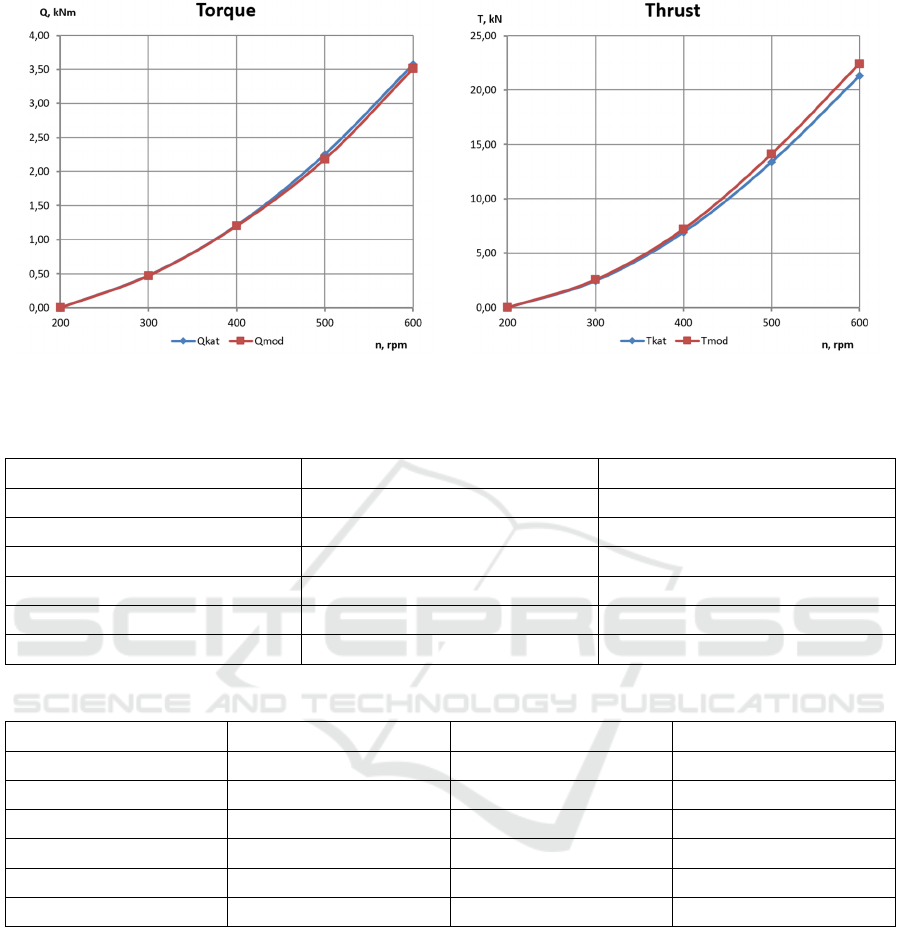
As a result of computer simulation there were
procured the correspondences of thrust and torque of
propeller in open water when the flow speed is 4
m/sec in the range of rotation speed from 200 to 600
rpm. The diagrams (figure 3) show that the maximum
divergence of values of thrust and torque got during
physical and computer modelling is not more than 5
and 2 percent respectively. Such inaccuracy is
thoroughly acceptable for comparative analysis.
3 COMPUTER SIMULATION OF
ROTARY-SCREW
PROPULSION UNITS
Parameters of RSP modelled were determined
according to the results of analysis of existing snow
and swamp-going amphibious vehicles (Kolotilin,
2015; Danilov, 2011; Kulyashov and Kolotilin, 1993;
Nikolaev and Kulyashov, 1973).
The comparative estimation of geometrical
parameters showed that their values for the most part
of amphibian are in the particular ranges (table 2).
One of the main factors determining the dynamical
characteristics of RSP in afloat motion is the helix
angle of Archimedes screw φ. This parameter
essentially effects on thrust and torque of propulsor
Figure 2: Performance curves of the propeller.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
440
а
)
Pro
p
eller tor
q
ue
b
)
Pro
p
eller thrust
Figure 3: Comparison of the results of computer simulation and the results of model testing of propeller in test basin.
Table 2: Value ranges of geometrical parameters of RSP.
Parameter
Designation
Value
Diameter, mm
D
600...1000
Blade number, pcs
z
1...3
Pitch ratio
H/D
1.46...2.83
Hub ratio
d/D
0.7...0.9
Disk-area ratio
θ
1.2...2.5
Helix angle, ° φ 24...42
Table 3: Geometrical parameters of Archimedes screw models researched.
Parameter
Model №1
Model №2 Model №3
D
800
800 800
z
3
3 3
H/D
1.4
1.8 2.5
d/D
0.8
0.8 0.8
θ
3.48
2.91 2.35
φ 24 30 39
and when the angular speed is permanent these
characteristics grow while angle φ increases. For the
preliminary estimation of RSP efficiency in afloat
motion in full-submerged mode three models with
end and middle values of angle φ were created (table
3).
Besides the evident, geometrical, parameters
impacting on the hydrodynamical characteristics of
propulsor the other factors should be noted,
specifically the performance peculiarities of rotary-
screw propulsion units of snow and swamp-going
amphibious vehicles in afloat motion essentially
determining the efficiency of RSP water moving
(Karaseva, 2021). These include the performance of
Archimedes screws of the most part of amphibian in
semi-submerged mode, the interaction between RSP
Archimedes screws and amphibia hull and the joint
action of Archimedes screws of amphibious vehicles
with tandem RSP as the most widespread design. At
this stage the aim was to simulate the performance of
single RSP apart from the vehicle in full-submerged
mode; however, in further research for development
of the calculation procedure of optimal parameters of
rotary-screw propulsion units while afloat
performance it is necessary to take into account all
factors.
Analysis of Efficiency of Full-submerged Archimedes Screws of Rotary-screw Propulsion Units of Snow and Swamp-going Amphibious
Vehicles
441
Computer simulation for variations of Archimedes
screw design considered was done for travelling mode
(𝑣4 𝑚/𝑠𝑒𝑐, 𝑛 200 … 1000 𝑟𝑝𝑚) and mooring
mode (𝑛 200 … 600 𝑟𝑝𝑚).
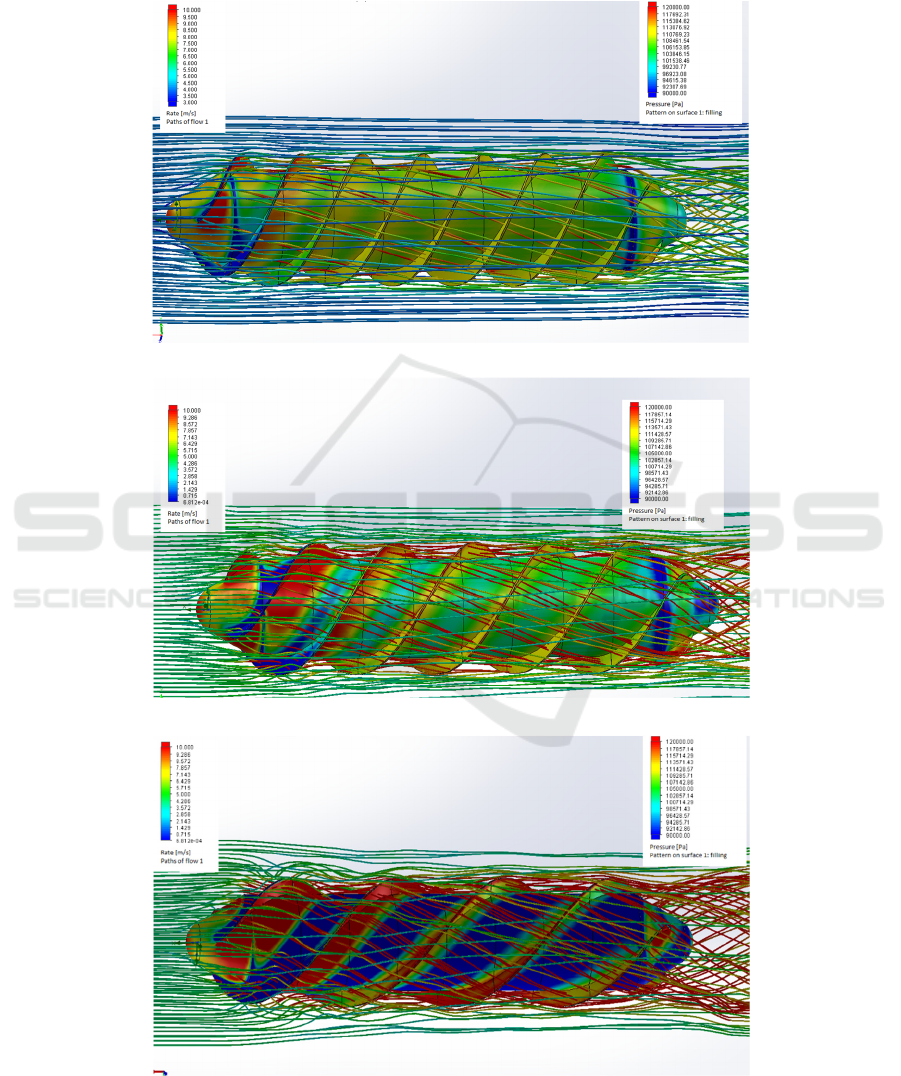
As a result, the large data set was got. Some
visualization patterns of the computer simulation
results are shown in the Figure 4.
а) Helix angle φ=24°
b) Helix angle φ=30°
c) Helix angle φ=39°
Figure 4: Visualization patterns of computer simulation of hydrodynamics of full-submerged Archimedes screw of RSP (v=4
m/sec, n=500 rpm).
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
442
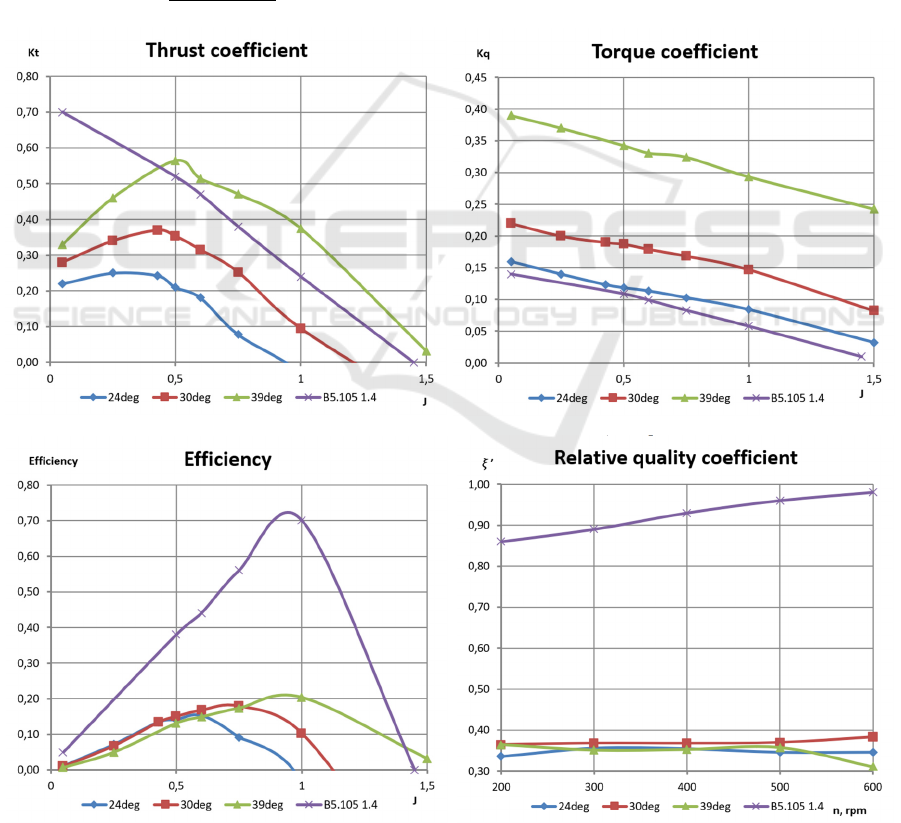
4 COMPARATIVE ANALYSIS
Figure 5 gives the performance curves of three
variations of rotary-screw propulsors and of propeller
of Troost series in relative coordinates got as a result
of computer simulation. The analysis of curves
received shows that in travelling mode in the range of
values of advance ratio simulated Archimedes screws
with geometrical parameters peculiar to RSP of snow
and swamp-going amphibian have the maximum
efficiency values range from 0.16 to 0.22 growing
while increasing of helix pitch (increasing of helix
angle φ). In the mooring mode the efficiency of using
of input power is usually characterized by relative
quality coefficient (Vasil’ev, 2006)
𝜉
𝑇
1,16
𝑁𝐷
/
(6)
Here 𝑁 is shaft power (kW), and 𝜉
lies in the
range 0.31…0.38. The model with helix angle 30
degrees has the maximum efficiency in all range of
rotational speeds.
Therefore, the limiting efficiency of Archimedes
screws is essentially inferior to the same of propellers
in open water; efficiency of the last ones in the range
covered can reach 0.7 and relative quality coefficient
lies in the range 0.86…0.98. Comparably low
efficiency of Archimedes screws is determined
foremost by the presence of massive hub which
resistance is essentially grows with increase of both
movement speed and rotation speed. One more factor
reducing efficiency is the nonuniformity of the
distribution of thrust forces along the helixes of
Archimedes screws graphically illustrated by the
patterns of dynamical pressures shown in the
Figure 4.
а
)
Thrust coefficient
b
)
Tor
q
ue coefficient
c) Efficienc
y
d
) Relative quality coefficient
Figure 5: Characteristics of propeller and rotary-screw propulsion units.
Analysis of Efficiency of Full-submerged Archimedes Screws of Rotary-screw Propulsion Units of Snow and Swamp-going Amphibious
Vehicles
443

When designing of rotary-screw propulsion units
of snow and swamp-going amphibious vehicles it
should be considered that:
1. The efficiency of using of input power for full-
submerged Archimedes screws of RSP in
mooring mode and in typical range of moving
modes is one-third of that of propellers with the
same diameter.
2. The maximum efficiency of RSP Archimedes
screws in travelling modes realises in the
advance ratio range 0.6…1.0 (the higher values
conforming to better overwater characteristics
correspond to larger helix angles). When
advance ratio is less than 0.5 Archimedes screws
have non-typical for propellers reduction of
thrust coefficient because of increasing of
resistance of massive hub during growing of
induced velocities.
3. The area of induced velocities along the
Archimedes screw (according to the result of
analysis of visualization patterns) which are 10
and more percent greater than velocity of
approaching flow has diameter equal to
1.1…1.2 diameters of Archimedes screw. To
reduce negative effects of interaction between
Archimedes screw and amphibia hull it is
necessary to locate Archimedes screws of RSP
at the appropriate distance from the hull.
5 CONCLUSIONS
Archimedes screws of existent RSP perform in
complex interaction with hull and appendages of
amphibia and between each other, moreover, the
semi-submerged mode is peculiar to snow and
swamp-going amphibious vehicles. The aspects
pointed require special research, nevertheless, the
performance curves of Archimedes screws in open
water received allow to determine the maximum
speed of afloat motion in the early stages of designing
when engine power and geometrical parameters of
Archimedes screws are set by land performance
conditions, and to correct these characteristics to
improve overwater performance.
ACKNOWLEDGEMENTS
The results of the given study have been obtained
with financial support of the grants of the President of
the Russian Federation № MK-336.2022.4.
REFERENCES
Basin, A.M., 1977. Propulsion and course-keeping qualities
of ships: study guide for higher educational
establishments of water transport. “Transport”,
Moscow.
Bernitsas, M.M. et al., 1981. KT, KQ and Efficiency Curves
for the Wageningen B-Series Propellers. The
University of Michigan, Ann Arbor.
Cole, B.N., 1961. Inquiry into amphibious screw traction.
Proceedings of the Institute of Mechanical Engineers
19, Vol. 75.
Danilov, R.G. et al., 2011. The off-road crossing: studies of
SKB ZIL. Svitok, Smolensk.
Educational resource online. (URL: https://studwood.ru,
access date: 2022/01/17)
Karaseva, S.A. et al., 2021. Efficiency determinants of
rotary-screw propulsion units of snow and swamp-
going amphibious vehicles in afloat motion. 20th
International Conference of the International Society
for Terrain-Vehicle Systems, ISTVS 2021.
Kolotilin, V. E. et al., 2015. Statistical model of selection
geometric parameters, mass-inertia and power
characteristics of transport-technological machines
with rotary-screw propellers. N. Novgorod,
Transactions of NNSTU, Issue 3 (110), pp. 156-208.
Kulyashov A.P., Kolotilin V.E., 1993. Ecological safety of
propulsion units of transport and technological
vehicles. Mashinostroenie, Moscow.
Nikolaev A.F., Kulyashov A.P., 1973. Rotary-screw
amphibian. Gor’ky Polytechnic Institute n.a. A.A.
Zhdanov, Volgo-Vyatskoe book publisher, Gor’ky.
Shapkin, V.A. et al., 2017. Introduction to dynamic of
systems snow-covered area – rotary-screw vehicle:
monograph. The Russian Presidental Academy of
National Economy and Public Administration, Nizhny
Novgorod.
Sogin, A.V., Shapkin, V.A., 2006. The research of afloat
motion of rotary-screw vehicle (RSV). News of Higher
Educational Institutions. Mechanical engineering, 5,
pp. 54-64.
Vasil’ev, V.F., 2006. Water-jet propellers: study guide.
Moscow State Automobile and Road Technical
University, Moscow.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
444
