
A Framework for Robust Remote Driving Strategy Selection
Michael Kl
¨
oppel-Gersdorf
a
and Thomas Otto
Fraunhofer IVI, Fraunhofer Institute for Transportation and Infrastructure Systems, Dresden, Germany
Keywords:
Driving Strategy Selection, Yard Automation, Particle Filter, Robust Optimization, Valet Parking, V2X, IEEE
802.11p.
Abstract:
In this paper, a framework for assisting Connected Vehicle (CV) is proposed, with the goal of generating
optimal parameters for existing driving functions, e.g., parking assistant or Adaptive Cruise Control (ACC),
to allow the CV to move autonomously in restricted scenarios. Such scenarios encompass yard automation as
well as valet parking. The framework combines Model predictive control (MPC) with particle filter estimators
and robust optimization.
1 INTRODUCTION
Remote control of Connected Vehicles (CVs) is an ac-
tive topic of research, spanning questions from gen-
erating feasible movements, e.g., in yard automation
(Belov et al., 2021), to the efficient transmission of the
calculated maneuvers (Tsukada et al., 2020) as well
as, of course, generating non-intersecting (in space-
time) trajectories (Scheffe et al., 2021). The goal of
this paper is to take a step back from the newest de-
velopments and to implement automatic driving capa-
bilities on an existing vehicle using existing technol-
ogy, which requires to retrofit the vehicle with com-
munication capabilities as well as gaining access to
driving functions. A centralized approach is used as
most vehicles will not provide the necessary compu-
tation power. Here, the goal is not to completely re-
mote control the vehicle (this might be difficult due
to latency reasons and missing sensors), but rather
to generate useful set points for the local assistance
functions, called driving strategies (Manzinger et al.,
2017). Following these strategies is then left to the ve-
hicle. A robust optimization approach is used to ac-
count for the inherent uncertainties when predicting
the future movement of vehicles. The framework is
not intended to provide general automated driving ca-
pabilities, rather it is mainly concerned with restricted
areas like parking lots or yards, where the driver can
drop of the vehicle at an entry point. As such, we are
commonly dealing with uninhabited vehicles.
The paper is organized as follows: In the next sec-
tion preliminaries and requirements for employing the
a
https://orcid.org/0000-0001-9382-3062
presented approach are discussed, whereas the third
section introduces the framework, which is used in a
case study in Section 4. The final section concludes
the paper.
2 PRELIMINARIES
In this section, the necessary inputs, their correspond-
ing latencies and minimum requirements for the pro-
posed framework are discussed.
2.1 Minimum Requirements on the
Vehicle under Test (VuT) and
Operating Area
In order to obtain driving strategy advice from the
proposed framework, the vehicle under consideration
(called VuT throughout the remainder of the paper)
needs to be connected, using either 802.11p, Cellular
V2X (C-V2X) or other means of connection, e.g., us-
ing Long Term Evolution (LTE) or 5G. Any other traf-
fic participant (called target hereafter) needs either to
be able to use the same communication means as the
VuT to broadcast its position or needs to be detected
by the VuT or by infrastructure sensors. This limits
the approach mainly to restricted areas, like industrial
yards or parking lots, since it is much easier to mon-
itor such areas. Furthermore, the maximum number
of participants is also much more limited. For driv-
ing strategy advice, the vehicle must be able to carry
out at least one of longitudinal (e.g., Adaptive Cruise
418
Klöppel-Gersdorf, M. and Otto, T.
A Framework for Robust Remote Driving Strategy Selection.
DOI: 10.5220/0011088900003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transpor t Systems (VEHITS 2022), pages 418-424
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Control (ACC)) or lateral (e.g., lane keeping) control
or both (e.g., parking assistant). Of course, an ex-
ternal interface to these functions must exist, at least
temporarily (based, e.g., on location). One way of
realizing this access is the usage of openpilot
1
. In ad-
dition, the VuT should have sufficient sensors to de-
tect situations of imminent danger (e.g., front crash
assistant) as the framework might be too slow to react
under such circumstances due to message latency.
2.2 Vehicle-to-Everything (V2X)
Communication
The main source of position information is posi-
tion data broadcasted via V2X using the Coopera-
tive Awareness Message (CAM) (ETSI EN 302 637-
2 V1.3.2 (2014-11), 2014) or alternatively the Basic
Safety Message (BSM). The following discussion is
based on ETSI ITS-G5 communication, but similar
values also hold true for other standards. Depending
on the dynamics of the vehicle, the CAM will be gen-
erated every 0.1 − 1 s. According to the specification,
the position given in the message cannot be older than
50ms. Transferring the message using our implemen-
tation of the V2X stack (Jacob et al., 2020) takes an
additional 1−13ms, with an average of 9.1ms (Strobl
et al., 2019). One additional method of gaining posi-
tion information is via the newly proposed Collective
Perception Message (CPM) (ETSI TR 103 562 V2.1.1
(2019-12), 2019), which can be used to transmit lists
of detected objects. It is important to keep in mind
that measurements sent via CPM are relative to the
sending station, i.e., besides the accuracy of the sen-
sors, also the position accuracy of the sending station
has to be taken into account.
2.3 Video Detection
The main approach to detect non-connected partici-
pants in the proposed framework relies on RGB and
thermal video data (Kl
¨
oppel-Gersdorf et al., 2021).
Based on YoloV3 (Redmon and Farhadi, 2018), pro-
cessing times between 0.3 − 2.5s for the whole chain
from taking the image to the calculated position are
achieved on a constrained computation device, the
NVIDIA Jetson AGX Xavier. The former num-
ber corresponds to a simple projection of one sin-
gle image of the detected object to the ground plane,
whereas the latter corresponds to the fusion of multi-
ple images and a 3D reconstruction. Other authors
report similar numbers, e.g., (Ortiz Castell
´
o et al.,
2020), where the detection process for a single im-
1
https://github.com/commaai/openpilot
ages takes a little less than 0.1s. Depending on the
scenario, more accurate processing methods can be
applied, e.g., the algorithm presented in (Ihrke, 2018).
2.4 Additional Means of Object
Detection
Although not considered here, several other informa-
tion sources could be included in the framework, e.g.,
Lidar detection (Barea et al., 2018) or the usage of lo-
cation tags based on, e.g., Zigbee (Kuo et al., 2010).
In this case, objection fusion as described in (Barea
et al., 2018; Liang et al., 2019) might be necessary.
3 FRAMEWORK
The framework introduced here shares the ideas of
(Stahl and Hauth, 2011) and (Blackmore, 2006), us-
ing Model predictive control (MPC) and the parti-
cle filters, not only to determine the current state but
also to predict future states. But instead of calculat-
ing different optimal control values depending on the
evolution of the underlying process only one control
variable per time step is determined, which satisfies
the given constraints for all sampled realizations of
the given process, which is an application of the sce-
nario approach to robust optimization (Calafiore and
Campi, 2006). On the other hand, the problem solved
at every step of the MPC scheme can also be consid-
ered a special case of (Blackmore, 2006), where the
probability of violating the constraints is required to
be zero.
3.1 Particle Filter
A particle filter (Gordon et al., 1993) with system-
atic resampling (Douc and Capp
´
e, 2005) is used to
estimate the current location of the VuT as well as
the target vehicles. A separate particle filter is em-
ployed for each tracked entity. The first time an entity
is detected, an initial distribution to sample from has
to be chosen. As this choice depends on the internal
state used within the particle filter, only few details
can be given here. The minimum information tracked
by the particle filter is the current position of the ve-
hicle, therefore, it is useful to initialize the position
information part of the particles with the first mea-
sured position plus some Gaussian noise with zero
mean and variance according to the accuracy of the
sensor. Particles are then propagated using a prede-
fined movement model with some additional random
noise. In the case of the VuT, this propagating func-
tion also considers control actions determined before,
A Framework for Robust Remote Driving Strategy Selection
419

i.e., for a single particle x
VuT
n
x
VuT
n+1
= f (x
VuT
n
,u
n
,ξ
n
,∆t
track,VuT
n
), (1)
where u
k
∈ U ⊂ R
n
u
are the control variables, x
VUT
n
∈
R
n
x
are the state variables of the VuT, ξ
n
are stochas-
tic components with known distribution, ∆t
track,VuT
n
is
the time step since the last update and the function
f describes the movement. Note, that there are no
smoothness assumptions on this function. The prop-
agation function for particles belonging to the addi-
tional targets t ∈ T
n
, where T is an index set of the
currently existing target vehicles at time step n, is sim-
ilar to the definition above but does not include con-
trols
y
t
n+1
= g(y
t
n+1
,η
t
n
,∆t
track,t
n
), (2)
where η
t
n
are stochastic components with known dis-
tribution. The particle filter employed follows the
usual steps of the particle filtering algorithm, i.e.,
sampling the new population of particles using the
previous sampled particles and the movement model,
adapting the weights given new position measure-
ments and a possible resampling. The number of
particles used per filter and time step is denoted by
n
particles
and typically ranges between 100 –1000, de-
pending on the underlying model. If only a restricted
driving area is given (as in the case study below, with
large non-drivable areas), this information can also
be included when adapting the weights. This is even
possible when using the particle filter for propagation
into the future. As mentioned above, the process of
tracking the single participants is completely asyn-
chronous. Therefore, as starting point for the opti-
mization process, the particles are propagated to one
single future time point, which is defined by the min-
imum amount of time required to generate the solu-
tion and transmit it to the VuT. Here, particles are
only reweighed by the drivable area criterion as no
measurements exist. As mentioned before, different
detectors need different computation times to gener-
ate a position information for a given object, e.g.,
GPS measurements are faster than information gained
via video detection. This can lead to asynchronous
and non-sequential data acquisition. Especially if the
slower sensor gives a very accurate position informa-
tion, it might be beneficial to recalculate the particle
filter chain including the newly obtained information.
Therefore, older states of the filter as well as the al-
ready obtained measurements have to be saved.
3.2 Robust Optimization
Borrowing the notation from (Stahl and Hauth, 2011),
the following stochastic optimization problem is to be
solved:
min
u
k
,...,u
k+T
p
J(x
k
,u
k
,.. .,u
k+T
p
,T
p
), (3)
s.t. X
VuT
n+1
= f (X
VuT
n
,u
n
,ξ
n
), (4)
Y
t
n+1
= g(Y
t
n+1
,η
t
n
), (5)
OS(x
VuT
n
) ∩ OS(y
t
n
) =
/
0,
x
VuT
n
∈ X
VuT
n
, y
t
n
∈ Y
t
n
(6)
t ∈ T , (7)
u
n
∈ U, (8)
n = k,. .., k + T
p
, (9)
where the variables are defined as above in the parti-
cle filter definition and X
VuT
and Y
t
describe the sets
of all particles belonging to either the VuT or the tar-
gets t ∈ T , respectively. The function OS(·) describes
the space occupied by a vehicle with a given state, i.e.,
equation (6) describes a no crash condition. The func-
tions f and g, representing the dynamics of the VuT
as well as the target vehicles, are the same as in the
description of the particle filter above, with the only
difference that the time step ∆t
prop
is now the same
for all vehicles as we are propagating into the future.
Finally, the objective function J has the form
J(x
k
,u
k
,.. .,u
k+T
p
,T
p
) =
k+T
p
∑
n=k
ku
n
− u
n−1
k
2
Q
+
k+T
p
∑
n=k+1
ks
n
− x
n
k
2
R
,(10)
where the norms are weighted Euclidian norms with
weighting matrices R and Q, and s
n
∈ R
n
x
are desired
set points. Evaluating the constraints (6) requires
|T |n
2
particles
computations, which might be computa-
tionally challenging. For an easier computation with
only |T | checks,
∀t ∈ T : conv(OS(X
VuT
n
)) ∩ conv(OS(Y
t
n
)) =
/
0 (11)
can be used instead of (6). Here, conv(·) describes
the convex hull. Although this reduces the number of
constraints to be checked significantly, this might lead
to a more conservative approach.
4 CASE STUDY
This use case is inspired by a real-world example.
Therefore, we want to mimic these circumstances
as much as possible, i.e., choosing the same venue,
adapting noise parameters to real-world sensor data
and reflecting the existing control actions. In this
special case, this means that we can only influence
the velocity of the VuT via Maneuver Coordination
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
420
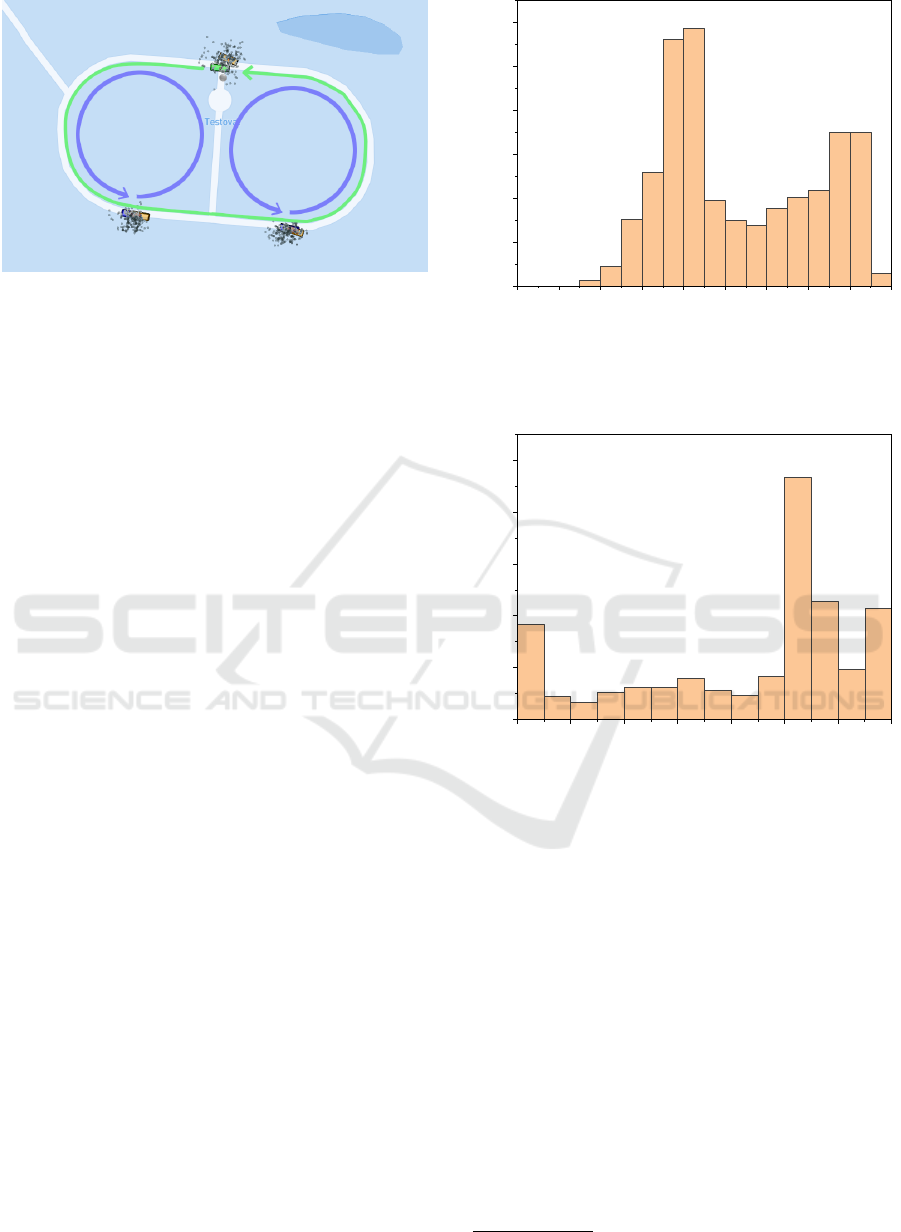
Figure 1: Simulation setup of the case study extracted from
Streetscape.gl (Uber ATG and VIS.GL, 2020) visualization.
Shown are the VuT in green and the two target vehicles in
purple as well as their corresponding driving trajectories.
Additionally, in orange are the position as given by the sim-
ulated GPS sensor. The point clouds represent position hy-
potheses generated by the particle filter.
Message (MCM) (Auerswald et al., 2019) but can-
not change the trajectory. The whole simulation sce-
nario is shown in Fig. 1 and consists of the VuT and
two other target vehicles. The VuT initially moves
at 50km/h, whereas the target vehicles move with
18km/h. Trajectories as used in the scenario are also
shown in Fig. 1. These trajectories are derived us-
ing a bicycle model (Althoff et al., 2017), but are not
known to the optimization algorithm.
For all three vehicles the states of the particle fil-
ter consist of ¯x = (x,y, v,θ), where x, y are coordinates
in a local Cartesian coordinate system measured in
meters, v is the velocity measured in meters per sec-
ond and θ is the heading measured in radians. For
the initialization of the particle filter, x and y are sam-
pled from a Gaussian distribution with the first mea-
surement received used as mean and Σ = 4.5 m × I
2x2
,
which corresponds to the Circular Error Probable
(CEP) of the GPS chip used (u blox, 2019). The ve-
locity is sampled from a normal distribution with zero
mean and standard deviation σ = 15 m/s. Finally,
the heading θ is sampled from a uniform distribution
from 0 to 2π, i.e., no information about the initial di-
rection of the vehicles is known. Similar to (Scheffe
et al., 2021), quantized control values are employed,
i.e., the acceleration of the VuT is controlled with
u
k
∈
−6m/s
2
,−3 m/s
2
,0 m/s
2
,3 m/s
2
,6 m/s
2
. In
addition, constraints on the maximum and minimum
speed of the VuT were considered, i.e., 0 m/s ≤ v ≤
13.88m/s. To propagate the particles, a simple linear
movement model is used, i.e.,
f ( ¯x,u,ξ) = ¯x + ∆t (v cos(θ),v sin(θ), u, 0) + ξ (12)
and
g( ¯y,η) = ¯y + ∆t (v cos(θ),v sin(θ),0, 0) + η, (13)
0 1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0 9 0
0
1 0 0
2 0 0
3 0 0
4 0 0
5 0 0
6 0 0
C o u n t
D i s t a n c e o f V u T t o o t h e r m o v i n g p a r t i c i p a n t s [ m ]
Figure 2: Histogram showing the distribution of distances
of the VuT to the other participants over a simulation time
of 171.4s, with a 0.1 s resolution, i.e., 1714 total time steps.
At no time, the distance is less than 15m.
0 2 4 6 8 1 0 1 2 1 4
0
1 0 0
2 0 0
3 0 0
4 0 0
5 0 0
C o u n t
V e l o c i t y [ m / s ]
Figure 3: Histogram showing the velocity of the VuT over a
simulation time of 171.4s, with a 0.1s resolution, i.e., 1714
total time steps. At several time steps the velocity drops to
0m/s. Average velocity is 8.7m/s.
where ξ, η ∼ N (0, diag(0.02,0.02, 1,0.2)). As
the vehicles follow circular motions, their heading
changes constantly. Therefore, CAM are generated
at a frequency of 10 Hz. Correspondingly, ∆t
track
≈
0.1s.
A prediction horizon of T
p
= 3 with ∆t
prop
=
1s is used. In (10), we choose R = 1 and Q =
diag(0,0,1,0), i.e., only a set point for the target
velocity of s
j
= s = (0,0,13.88 m/s, 0) (correspond-
ing to 50 km/h) is given. The simulation and opti-
mization uses a proof-of-concept implementation in
Python using pfilter
2
with n
particles
= 200 for each en-
tity and time step, without any optimization like par-
allelization. To still achieve real-time performance,
an aggressive branch-and-bound scheme (Frese et al.,
2
https://github.com/johnhw/pfilter
A Framework for Robust Remote Driving Strategy Selection
421
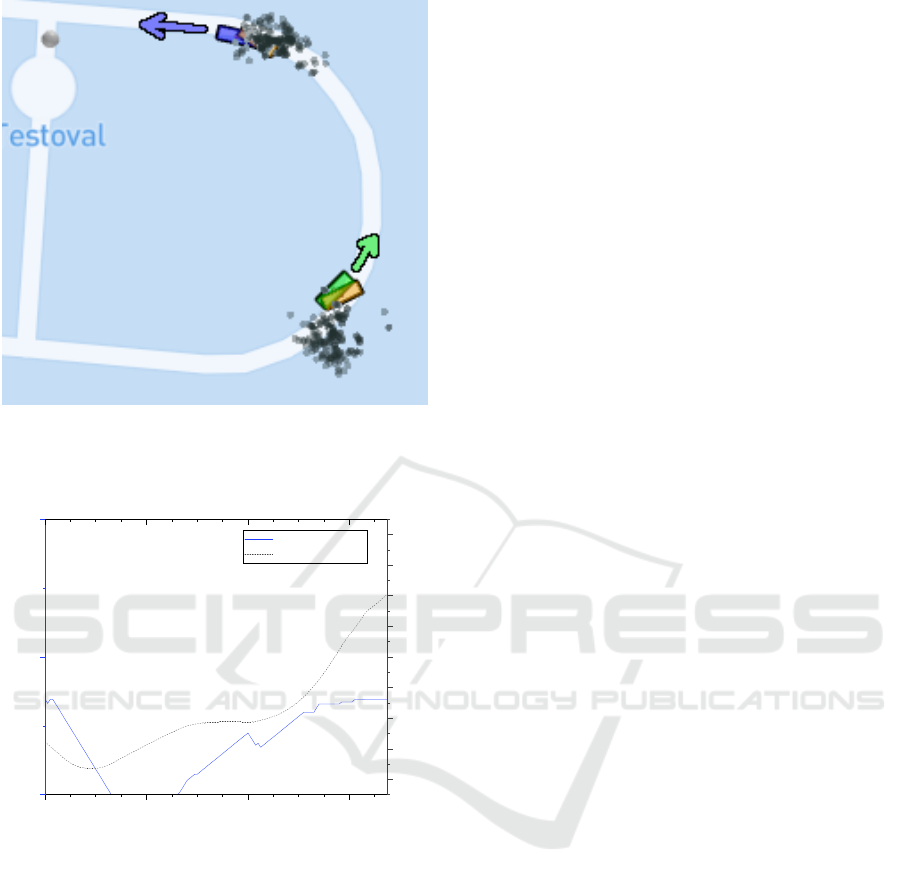
Figure 4: Vehicle configuration at t = 20s. Both vehicles
are moving anti-clockwise as shown. At this time instance,
the green VuT moves with 50 km/h whereas the violet par-
ticipant moves at 18 km/h.
2 1 2 2 2 3 2 5 2 6 2 7 2 9 3 0 3 1 3 32 0 2 4 2 8 3 2
0
2 0
4 0
V e l o c i t y V u T
T a r g e t D i s t a n c e
T i m e t [ s ]
V e l o c i t y V u T [ m / s ]
1 0
2 0
3 0
4 0
5 0
6 0
7 0
8 0
9 0
D i s t a n c e t o V u T [ m ]
Figure 5: Distance to one of the targets and resulting veloc-
ity of the VuT after optimization. The initial configuration
corresponding to t = 20 s is shown in Fig. 4.
2010) is used. Additionally, variant (11) is used to
ease the computational burden. Simulation results for
a time horizon of 171.4s can be found in Fig. 2–
5. In Fig. 2, a histogram of the Euclidian distance
of the VuT’s center to the target vehicles centers is
shown. Given the chosen vehicle dimensions, any dis-
tance less than 6 m could be considered hazardous and
would possibly lead to a collision. As can be seen, the
distances do not fall under the critical value, i.e., the
algorithm was able to provide feasible driving strate-
gies. As the histogram in Fig. 3 shows, the algorithm
leads to lower VuT velocities over large parts of the
scenario and even stopped the vehicle for a total of
nearly 20 seconds. One instance of this happening is
shown in Fig. 4 and 5. Here, Fig. 4 shows the ve-
hicle configuration at t = 20 s and Fig. 5 shows the
VuT’s velocity as well as the distance to one of the
two participants. As the VuT gets closer to the other
participant, the optimization framework advises sharp
deceleration to avoid a collision, bringing the VuT to
a full stop at t = 22.6 s. As the distance to the tar-
get grows larger again, the algorithm responds with
accelerating the VuT at t = 25.2s.
Overall, it can be found that the derived acceler-
ations lead to a rather conservative behavior. Even
in the worst case, occurring at t = 21.4s (compare
Fig. 5), the distance to the target is 13.71 m, which
is more than double of the critical distance. Further-
more, the VuT came to a halt at several instances. This
is partly caused by the rather large CEP of the GPS
chip when used without real-time kinematics, which
leads to large variations when propagating the par-
ticles and is partly also a result of the chosen opti-
mization scheme. An approach based on chance con-
straints (Blackmore, 2006) would possibly lead to a
less conservative result. Nonetheless, one should keep
in mind that no trajectory information was available
to the algorithm, allowing for rather large deviations
in the propagation algorithm. If these were available,
e.g., via a future version of the MCM, and would be
incorporated in the algorithm, better optimization re-
sults could be expected as the particle filter penalizes
hypotheses deviating from the given trajectory and
not only penalize hypotheses outside the drivable area
as in the given case.
4.1 Scaling the Scenario
As mentioned above, the presented show case ran in
real-time, i.e., every computation step took strictly
less than 0.1 s on an Intel i7-10850H with 32 GiByte
RAM using only one of the existing six processor
cores (ignoring hyperthreading). In the following, we
will discuss how enlarging the scenario (more targets
and/or more VuTs) would influence computation time
and how real-time performance could be achieved in
these cases.
When increasing the number of targets, the com-
putational load increases linearly, i.e., using parallel
computing on the CPU would allow to handle up to
12 targets using the given hardware. Higher number
of targets could be dealt with employing more capa-
ble hardware. In such cases it might be also beneficial
to detect relevant targets, e.g., based on Euclidian dis-
tance or road geometry, and only include these into
the optimization algorithm. While non-relevant tar-
gets still have to be tracked (as they could become
relevant later on), no collision checks have to be car-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
422

ried out in the optimization step. Generally, the prop-
agation of particles is very suited for processing on
graphic cards, since the same transformations is ap-
plied to a large number of different particles. De-
pending on the hardware employed, up to several hun-
dred targets could be tracked in the same time it now
takes to track the participants in the scenario pre-
sented above.
When increasing the number of VuTs, computa-
tional load very much depends on the specific sce-
nario. In the best case, there is no interaction be-
tween VuTs, e.g., because of distance, and the opti-
mization can be carried out for each VuT separately,
leading only to a linear increase in computational de-
mand. If there are interactions, two approaches come
to mind. First, one could still optimize the VuTs sep-
arately and treat the other VuTs as targets. This leads
to a super-linear increase in computational demand,
since there are still n
VuT
optimization problems to be
solved, where n
VuT
is the number of VuTs, but the
number of targets is also increased by n
VuT
−1. While
this could still be handled by parallelization, some
situations might require joint optimization, i.e., co-
operation between the vehicles, e.g., if two VuTs are
approaching each other head on. In joint optimiza-
tion, computation time very much depends on the op-
timization algorithm and the specific problem formu-
lation. Above, a discrete optimization problem is for-
mulated. Naively scaling this to several VuTs, would
lead to an exponential increase in possible control val-
ues. While parallelization might allow to deal with
up to three VuTs in joint optimization, more aggres-
sive optimization routines would have to be employed
(Tang, 1998), at the cost of finding only a reasonable
but not the optimal solution.
The current implementation is in Python, further
speed ups could be expected from switching to C++,
although it is hard to quantify which speed ups can
be achieved as some of the Python libraries already
employ C/C++ code themselves.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, a framework for assisting CV with at
least on driving function, e.g., ACC, was proposed.
The approach only relies on position information de-
rived via V2X messages or through external sensors
like cameras and, therefore, can incorporate even a
certain number of conventional vehicles or persons.
Use case are mainly in yard automation or on other
restricted zones, e.g., automatically moving freshly
build vehicles from the conveyor belt to a parking
area without the need for a human driver. A simu-
lation based on a real-live scenario showed the fea-
sibility of the framework. While the scenario ran in
real-time without much need for optimization, larger
scale problems could benefit from parallelization.
Applications in live traffic are also possible, but
given the conservativeness of the presented approach,
it would possibly take a long time to cross, for exam-
ple, a non-signalized intersection. Approaches based
on chance-constraints (Blackmore, 2006) could be a
better choice in this case. One additional drawback
of using the method in live traffic is the requirement
to detect every traffic participant, which could require
a large number of detectors. Finally, some situations
could also be difficult to track with the particle filter,
e.g., a person entering a vehicle or a passenger vehicle
being loaded on a truck. Such scenarios would require
additional information from the sensor system.
The simulations, so far, considered only sparsely
populated scenarios. While the conservativeness of
the algorithm would lead to longer driving times in
comparison to a human driver, this is not a problem in
such cases. Future work includes simulations of more
densely populated uses cases to allow a measurement
how performance is impacted by using the algorithm
instead of a human driver.
ACKNOWLEDGEMENTS
This research is financially supported by the German
Federal Ministry of Transport and Digital Infrastruc-
ture (BMVI) under grant numbers FKZ 45FGU141 B
(DiSpoGo) and co-financed by the Connecting Eu-
rope, Facility of the European Union (C-ROADS Ur-
ban Nodes). We would like to thank Ina Partzsch for
her valuable comments and suggestions.
REFERENCES
Althoff, M., Koschi, M., and Manzinger, S. (2017). Com-
monroad: Composable benchmarks for motion plan-
ning on roads. In 2017 IEEE Intelligent Vehicles Sym-
posium (IV), pages 719–726. IEEE.
Auerswald, R., Dod, M., Franke, L., Fritzsche, R., Haber-
jahn, M., Jungmann, A., Kl
¨
oppel-Gersdorf, M.,
Krems, J. F., Lorenz, S., Kreißig, I., et al. (2019).
Heterogeneous infrastructure for cooperative driving
of automated and non-automated connected vehicles.
In Smart Cities, Green Technologies and Intelligent
Transport Systems, pages 270–296. Springer.
Barea, R., P
´
erez, C., Bergasa, L. M., L
´
opez-Guill
´
en, E.,
Romera, E., Molinos, E., Ocana, M., and L
´
opez, J.
(2018). Vehicle detection and localization using 3d
A Framework for Robust Remote Driving Strategy Selection
423

lidar point cloud and image semantic segmentation.
In 2018 21st International Conference on Intelligent
Transportation Systems (ITSC), pages 3481–3486.
Belov, N., Barbosa, C. E. V., Keppler, F., Kolb, J., Nitzsche,
G., and Wagner, S. (2021). Trucktrix
R
path-planning
in the helyos operating system for yard automation.
In 2021 IEEE 19th International Conference on In-
dustrial Informatics (INDIN), pages 1–6. IEEE.
Blackmore, L. (2006). A probabilistic particle control ap-
proach to optimal, robust predictive control. In AIAA
Guidance, Navigation, and Control Conference and
Exhibit, page 6240.
Calafiore, G. and Campi, M. (2006). The scenario approach
to robust control design. IEEE Transactions on Auto-
matic Control, 51(5):742–753.
Douc, R. and Capp
´
e, O. (2005). Comparison of resampling
schemes for particle filtering. In ISPA 2005. Proceed-
ings of the 4th International Symposium on Image and
Signal Processing and Analysis, 2005., pages 64–69.
IEEE.
ETSI EN 302 637-2 V1.3.2 (2014-11) (2014). ETSI EN
302 637-2 V1.3.2 (2014-11) Intelligent Transport Sys-
tems (ITS); Vehicular Communications; Basic Set of
Applications; Part 2: Specification of Cooperative
Awareness Basic Service. Standard, ETSI.
ETSI TR 103 562 V2.1.1 (2019-12) (2019). ETSI TR 103
562 V2.1.1 (2019-12) Intelligent Transport Systems
(ITS); Vehicular Communications; Basic Set of Ap-
plications; Analysis of the Collective Perception Ser-
vice (CPS); Release 2. Standard, ETSI.
Frese, C., Beyerer, J., and Huber, M. (2010). Cooperative
motion planning using branch and bound methods. In
Proc. of the 2009 Joint Workshop of Fraunhofer IOSB
and Institute for Anthropomatics, Vision and Fusion
Laboratory (J. Beyerer and M. Huber, eds.), no. IES-
2009-13, pages 187–201.
Gordon, N. J., Salmond, D. J., and Smith, A. F. (1993).
Novel approach to nonlinear/non-gaussian bayesian
state estimation. In IEE Proceedings F-radar and sig-
nal processing, volume 140, pages 107–113. IET.
Ihrke, S. (2018). Precise edge tracking of vehicles using a
static camera setup. In 2018 International Symposium
on Intelligent Signal Processing and Communication
Systems (ISPACS), pages 12–17.
Jacob, R., Anwar, W., Schwarzenberg, N., Franchi, N., and
Fettweis, G. (2020). System-level performance com-
parison of ieee 802.11p and 802.11bd draft in highway
scenarios. In 2020 27th International Conference on
Telecommunications (ICT), pages 1–6.
Kl
¨
oppel-Gersdorf, M., Trauzettel, F., Koslowski, K., Pe-
ter, M., and Otto, T. (2021). The fraunhofer ccit
smart intersection. In 2021 IEEE International In-
telligent Transportation Systems Conference (ITSC),
pages 1797–1802. IEEE.
Kuo, W.-H., Chen, Y.-S., Jen, G.-T., and Lu, T.-W. (2010).
An intelligent positioning approach: Rssi-based in-
door and outdoor localization scheme in zigbee net-
works. In 2010 International Conference on Machine
Learning and Cybernetics, volume 6, pages 2754–
2759.
Liang, M., Yang, B., Chen, Y., Hu, R., and Urtasun, R.
(2019). Multi-task multi-sensor fusion for 3d ob-
ject detection. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Manzinger, S., Leibold, M., and Althoff, M. (2017). Driv-
ing strategy selection for cooperative vehicles using
maneuver templates. In 2017 IEEE Intelligent Vehi-
cles Symposium (IV), pages 647–654.
Ortiz Castell
´
o, V., Salvador Igual, I., del Tejo Catal
´
a,
O., and Perez-Cortes, J.-C. (2020). High-profile
vru detection on resource-constrained hardware using
yolov3/v4 on bdd100k. Journal of Imaging, 6(12).
Redmon, J. and Farhadi, A. (2018). Yolov3: An incremental
improvement. arXiv preprint arXiv:1804.02767.
Scheffe, P., Pedrosa, M. V., Flaßkamp, K., and Alrifaee, B.
(2021). Receding horizon control using graph search
for multi-agent trajectory planning.
Stahl, D. and Hauth, J. (2011). Pf-mpc: Particle filter-
model predictive control. Systems & Control Letters,
60(8):632–643.
Strobl, S., Kl
¨
oppel-Gersdorf, M., Otto, T., and Grimm, J.
(2019). C-its pilot in dresden – designing a modu-
lar c-its architecture. In 2019 6th International Con-
ference on Models and Technologies for Intelligent
Transportation Systems (MT-ITS), pages 1–8.
Tang, Z. (1998). Time constrained optimization. In Pro-
ceedings of the 37th IEEE Conference on Decision
and Control (Cat. No.98CH36171), volume 4, pages
3899–3906 vol.4.
Tsukada, M., Oi, T., Kitazawa, M., and Esaki, H. (2020).
Networked roadside perception units for autonomous
driving. Sensors, 20(18).
u blox (2019). Product summary NEO-M8P series u-blox
M8 high precision GNSS modules. https://www.u-
blox.com/en/docs/UBX-15015836. Accessed: 2022-
01-14.
Uber ATG and VIS.GL (2020). AVS project page.
https://avs.auto. Accessed: 2020-12-15.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
424
