
Using Keypoint Matching and Interactive Self Attention Network to
Verify Retail POSMs
Harshita Seth, Sonaal Kant and Muktabh Mayank Srivastava
a
ParallelDots,Inc., India
Keywords:
Retail Computer Vision, Feature Matching, Neural Networks, Image Matching.
Abstract:
Point of Sale Materials(POSM) are the merchandising and decoration items that are used by companies to
communicate product information and offers in retail stores. POSMs are part of companies’ retail marketing
strategy and are often applied as stylized window displays around retail shelves. In this work, we apply
computer vision techniques to the task of verification of POSMs in supermarkets by telling if all desired
components of window display are present in a shelf image. We use Convolutional Neural Network based
unsupervised keypoint matching as a baseline to verify POSM components and propose a supervised Neural
Network based method to enhance the accuracy of baseline by a large margin. We also show that the supervised
pipeline is not restricted to the POSM material it is trained on and can generalize. We train and evaluate our
model on a private dataset composed of retail shelf images.
1 INTRODUCTION
Computer Vision is used in many business applica-
tions nowadays especially Fast Moving Consumer
Goods (FMCG) companies are using computer vi-
sion for detecting and recognizing products in super-
markets. This helps them evaluate their retail pres-
ence with respect to their competitors. Computer Vi-
sion can also have applications in retail marketing and
merchandising. Point of Sale Material (POSM) are
advertising materials that are used to communicate
product information and discounts to the consumers
in retail stores. FMCG companies want to be assured
of the fact that all merchandising material is being
placed according to their specifications so that their
consumers can be aware of the latest offers and new
products. In this work, we have proposed Computer
Vision methods which can be used to automatically
verify POSMs from retail shelf images.
Most POSMs are applied as window displays that
is stylized windows and shelves in supermarkets.
These grab customer attention as they are searching
for products on shelves. Each window display is sup-
posed to have many components like cutouts and shelf
strips. We aim to detect whether a photograph be-
longs to a specific POSM as well as verify the pres-
ence of all components of window displays in the im-
a
https://orcid.org/0000-0002-1448-1437
age.
A Window display is a combination of shelf strips
and cut-outs which we refer to as parts in this paper.
As shown in fig 1 a Window display in a canonical do-
main is referred to as template image. The template is
computer Generated using software like inkscape or
illustrator. On the other hand the test image is a real
world photo taken from inside of a shop. The discrep-
ancy between the real domain and canonical domain
can be seen in fig 1. Apart from computer generated
template looking different from a real world instance,
the relative dimensions of different parts can also vary
due to variable sizes of retail shelves across stores,
making the verification task non-trivial. To deal with
the large perceptual gap in the visual domain we use a
keypoint matching based approach that works on lo-
cal feature matching. we use this to find a POSMs of
template image in a real world test image. We divide
our task into two parts : 1. Detecting whether a POSM
is present in an image and 2. Verifying whether all
parts of a POSM are individually present. For POSM
detection, we use CNN based keypoint matching. In
our baseline for verifying individual parts, we show
that simple rules on CNN keypoint matching meth-
ods can give us a good initial performance. As an
improved method of individual part verification, we
replace simple rules on keypoint matching by a neu-
ral network called Interaction Network that enhances
the accuracy. Given a template image (T) and real
Seth, H., Kant, S. and Srivastava, M.
Using Keypoint Matching and Interactive Self Attention Network to Verify Retail POSMs.
DOI: 10.5220/0011087800003209
In Proceedings of the 2nd International Conference on Image Processing and Vision Engineering (IMPROVE 2022), pages 195-201
ISBN: 978-989-758-563-0; ISSN: 2795-4943
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
195

Figure 1: Left: A real world test image from inside of a
retail store, Right: An template image for a window display
POSM. Our Aim is to detect the complete POSM in the
real world image along with the individual presence of shelf
strips [and other applicable parts] which are shown using
green bounding boxes. Such bounding boxes are available
for all parts in all template images. Readers can notice the
noise and perceptual difference between templates and real
world photos of POSMs.
world test image(q), keypoint matching is performed
on both to retrieve the matched local features which
are then used by Interaction Network for classifica-
tion of parts as found or not found. The key ideas
when attempting to alleviate the above challenges of
part verification and domain discrepancy are 1) We
use Superpoint(DeTone et al., 2018), a local feature
based keypoint matching technique to identify POSM
of the template in real world test image. 2) We use at-
tention based method for template part presence veri-
fication.
2 RELATED WORK
Template matching is one of the most frequently used
techniques in computer vision and is very closely re-
lated to our problem as given a template image we
have to locate it in a real world test image but all the
conventional template matching techniques fail due
to two reasons 1.Our problem is not limited to just
matching, we also aim to detect the presence of each
part of POSM in real world test image, 2. The relative
dimensions of POSM parts in real world stores is not
necessarily same as in template.
We divide our problem into two subproblems 1)
Global Matching and 2) Local Part Matching.
Global Matching: Template matching is a classi-
cal problem which was solved using basic machine
learning methods like sum-of-squared-differences or
normalized cross correlation to calculate the similar-
ity score between the template and the real world
test image. But these methods were limited to very
small transformation between template and real world
test image which was later improved by Dekel et
al.[11] that introduced the measure to remove the
bad matches caused by background pixels. As an
improvement DDIS (Talmi et al., 2017) was intro-
duced by Talmi et. al, that uses multiple template de-
formation before nearest neighbor matching. These
classical methods fail to perform when there is com-
plex transformation or huge domain variance. Later
many deep learning based approaches(Luo et al.,
2016),(Thewlis et al., ),(Bai et al., 2016),(Tang et al.,
2016),(Wu et al., 2017) were introduced for stereo
matching, object tracking etc. that uses shared deep
architectures for feature extraction and performs fea-
ture matching on template and real world test image
to get a similarity score. All the recent state of the
art template matching algorithms uses deep features
to locate the complete template image in the test im-
age and none of the above methods can be used for
part level presence search.
Local Matching: Local feature matching is a vast
field of research which aims to recognize features of
the same object across different viewpoints and do-
mains. The preliminary step of local feature match-
ing is detecting the interest points, referred as Key-
Points. Traditional Interest point detectors such as
Harris Corner Detection (Harris et al., 1988), FAST
(Rosten and Drummond, 2006) are very well known.
As a second step for local matching a descriptor for
each interest point is created which is an informa-
tion that stands apart from other keypoints. Tra-
ditional and famous algorithms such SIFT (Lowe,
2004), ORB (Rublee et al., 2011) and many more
are used for local descriptors but recently many deep
learning approaches have been introduced which out-
performs the traditional machine learning algorithms
for keypoint detection and descriptor matching. De
tone et.al (DeTone et al., 2018) introduced a multi task
deep learning algorithm for both the keypoints and de-
scriptors known as Superpoint. We use this technique
as a baseline for our problem and introduce the certain
challenges which are faced by this algorithm such as
high dependency on threshold for number of matches,
huge domain shift in template and test image. We try
to overcome these challenges by introducing another
network, called Interaction Network explained in de-
tail in section 3.2.2, on top of superpoint.
Self-attention: Our interaction network is inspired by
self attention (Vaswani et al., 2017). A self-attention
module responds to a position of a sequence by tak-
ing into account the information of all positions and
taking their weighted average in an embedding space.
We have used to capture the interaction between the
part descriptors. Self-attention is predominantly used
in machine translation (Radford et al., 2018)(Yang
et al., 2019) but have also been extended to image and
video problem in computer vision. Non-local opera-
tion (Wang et al., 2018), scene segmentation (Fu et al.,
2019), classification (Hu et al., 2018) are one of them.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
196

Figure 2: Overview of our first step : N1 and N2 are the descriptors and keypoints from the superpoint architectures. After
nearest neighbor filtering, N matched pairs are then passed through the aggregation module as shown in blue box. The final
list of embeddings of template and real world test image is then further used in second step of interaction network.
3 OUR APPROACH
As of our knowledge this is the first time anyone is
trying to solve this real world problem statement. Re-
cently (Arroyo et al., 2020) has introduced a slightly
similar problem statement of classifying Leaflets pro-
motion but those scenarios are comparatively easy to
solve as they are digital and we work on real world
images taken from a smartphone. We aim to solve
this problem without any requirement on training on
new Window displays. We use our in-house dataset to
prove the following : 1. Fully unsupervised CNN key-
point matching can act as a good baseline and 2. inter-
action network trained on in-house data can general-
ize to other unseen templates. In our training dataset,
we have a real world test image which is mapped to a
template image. Fig 1 shows the pair of image, test(a)
and template(b). Ground truth for the pair of images
is the presence of each part in the real world image
and bounding box annotation of the corresponding
part in the template image. Our training data con-
sist of 300k real world test images which is mapped
to 37 unique gallery images, we have used 250k im-
ages for training and remaining as validation data. To
test model generalization we have created separated
test data which have 21k real world test images which
are mapped with 8 template images. The intersection
between train template image and test template image
is zero.
Our approach presented in this paper is focused on
detecting the presence of template image and its parts
as shown in the fig 1. We divide the solution into the
following two main parts:
1. Detection of POSM as a whole in real world test
image image using keypoint based methods
2. Verification of the parts of the template image us-
ing simple rules on keypoint matching in baseline
Table 1: POSM Detection.
Method Accuracy F1 Recall Precision
Superpoint 0.747 0.838 0.967 0.739
and training a interaction network on output of
keypoint matching as an enhancement.
3.1 Detection of POSM
POSM is detected by using CNN keypoint matching.
This verifies whether an real world image contains a
POSM. The proposed keypoint detector and descrip-
tor method is based on De tone et. al. (DeTone
et al., 2018) as it has been proven to outperform
SIFT(Lowe, 2004), ORB(Rublee et al., 2011) based
methods significantly. Superpoint has been the state
of the art on many datasets and is known best for local
feature matching. We use Superpoint as our base Key-
point detector and descriptor. Given a template image
(T) and test image(q) we pass both the images through
the pretrained superpoint model to extract all the rel-
evant local features. The above architecture is used to
detect descriptors N1 and N2 of the test and template
image respectively. N pairs of descriptors are ex-
tracted using an exhaustive nearest neighbour search
algorithm. The unmatched points and descriptors are
discarded from both the images. We decipher simple
rules about N to determine the presence of POSM in
real world images. If the number of matched points N
between template and real world image is greater than
a threshold t , we say that the POSM is present in the
real world image. While determining the threshold t
from a sample of images, we keep into mind the pos-
sibility of POSM parts missing from the real world
images.
Using Keypoint Matching and Interactive Self Attention Network to Verify Retail POSMs
197

3.2 POSM Part Detection
After matching keypoints of a template and a real
world image, we get pairs of matched points which
like stated in above section are used to check for pres-
ence of POSM. Next we define the problem of detect-
ing individual POSM parts and how the matched key-
points are used to perform the task. For a template n
& real world image pair, data for ith pair of matched
keypoints can be represented as {K
t
ni
,K
r
i
,D
t
ni
,D
r
i
} ∈
[K
T
,K
R
], where K
t
n
and K
r
i
∈ R
2
i
, a 2D image coordi-
nate comes from template image and real world im-
age respectively, and similarly D
t
ni
and D
r
i
∈ R
n
are
their descriptors. Each POSM template can have
multiple parts like shelf strips, cutouts, posters etc.
In our dataset, we have annotations for bounding
boxes of all parts of POSMs in their template im-
ages 1 . Let the mth part of nth POSM be de-
noted by P
m
n
and its bounding box is B
m
n
∈ R
4
. Thus,
each K
t
ni
can be determined to be present in the part
(whether K
t
ni
from P
m
n
) if K
t
ni
∈ B
m
n
When training a supervised learning algorithm,
we collate all the keypoints pairs and their descrip-
tors to their respective parts. We give two labels to
each matched pair 1) Part in whose bounding box in
template image keypoint from a matched pair lies or
”None” if the keypoint doesn’t belong to any part.
2) Another global label we give is 1 if POSM is
present else the global label given is 0. So we now
have a cartesian of the form K
t
ni
,K
r
i
,D
t
ni
,D
r
i
,P
m
n
=
0/1,POSM present = 0/1.
We use these labels to calculate the loss of our in-
teraction network.
3.2.1 POSM Part Verification using Simple
Rules on Matched Keypoints
We propose some simple rules which we can apply
on the N matched keypoint pairs of template-test im-
age to verify parts of POSM. In our dataset we have
ground truth of the presence of each part in the real
image and the bounding box annotation of the cor-
responding part in the template image. Using those
annotations we count the number of keypoints that
got matched and also lie inside the annotated bound-
ing box for each part of the template image. If the
count of those keypoints inside a part is greater than
the threshold t
p
then we predict that part to be present
in the real image. We use this simple rule for part veri-
fication as our baseline. So if for a template/real world
image pair n, {K
t
ni
,K
r
i
,D
t
ni
,D
r
i
} ∈ [K
T
,K
R
] where K
t
ni
of part P
m
n
¿ t
p
that part is deemed to present in the
real world image.
Figure 3: Overview of Second step : A self attention module
is applied on the output of the first step followed by couple
of linear layers. There are three loss in this step which are
applied on shared fc2 layer.
3.2.2 Interaction Network based POSM Part
Verification
We propose an Interaction Network which is used for
two main purpose 1) To detect parts of a POSM as an
alternative to simple rules we used in the baseline 2)
To alleviate the discrepancy in canonical domain of
template image and real world domain of real image
using an attention based mechanism.
3.2.3 Self Attention
Attention was first introduced by (Vaswani et al.,
2017) to help memorize the long sentences in Neural
Machine translation. The output of the attention
module is the weighted sum of the value where
each weight is determined by the softmax on the dot
product of Query and Key.
Attention(Q,K,V ) = so f tmax(
QK
T
√
d
k
)V
Self Attention is when both Query, Key and Value
come from the same input. We use self attention to
learn combinatorial inter dependencies among repre-
sentations of all pairs of matched descriptors. Please
note that while self attention is generally used on
numbered sequences where each item of sequence
is enumerated and is given a positional embedding,
modelling matched keypoints is unordered and thus
we don’t use any positional embeddings.
The output from the superpoint network gives N
pairs of matched descriptors for each pair of tem-
plate/real world images [K
T
,K
R
]. Instead of passing
the pair of these features directly to the interaction
network we perform some aggregating operations on
their decriptors and pass them as input. As shown
in figure 2, for a given a pair of descriptors we cre-
ate a single embedding of length 513 using subtrac-
tion, multiplication and similarity operations on their
decriptor pair. After concating each 513 descriptors
D
t
r
i
, [D
t
r
1
kD
t
r
2
k............D
t
r
i
k........D
t
r
N−1
kD
t
r
N
] we have
list of N embeddings.
The final list of N embeddings of length 513 are
passed through the self attention module in which
three 1d convolutions are used for deriving Query,
Key and Value from the embeddings. The attention
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
198
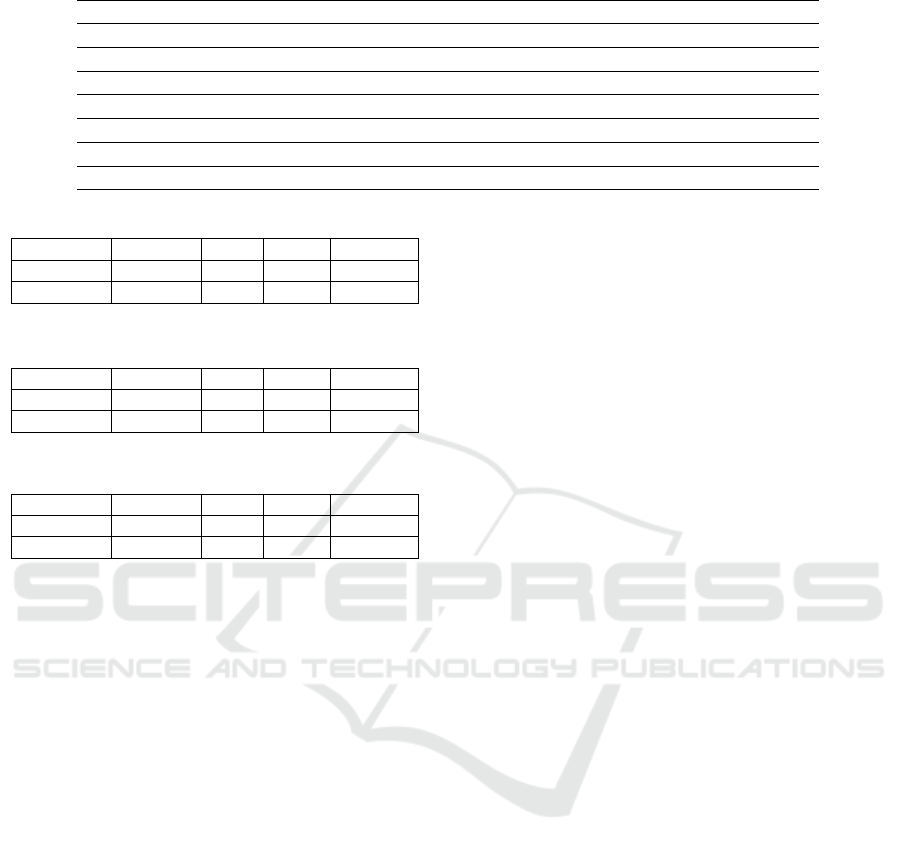
Table 2: Ablation Effect of different techniques in our Method.
Loss Aggregation Rec Prec Acc F1
Loss1 Loss2 Loss3 Similarity Multi Concat
X X X X X 0.778 0.956 0.832 0.858
X X X X 0.794 0.889 0.801 0.839
X X X X 0.684 0.958 0.774 0.798
X X X X 0.767 0.952 0.831 0.856
X X X X 0.774 0.959 0.831 0.857
X X X 0.772 0.960 0.830 0.856
Table 3: Taking unmatched part count as zero.
Method Accuracy F1 Recall Precision
Our 0.832 0.858 0.778 0.956
Superpoint 0.809 0.833 0.729 0.978
Table 4: Removing the unmatched parts from evaluation.
Method Accuracy F1 Recall Precision
Our 0.918 0.935 0.945 0.925
Superpoint 0.810 0.826 0.879 0.956
Table 5: Basic Heuristics.
Method Accuracy F1 Recall Precision
Our 0.89 0.916 0.907 0.925
Superpoint 0.86 0.894 0.891 0.898
module computes responses based on relationships
between different locations which are not captured in
a fully connected layer. After the attention module we
use a couple of fully connected modules FC1, FC2 for
classification of each embedding.
We use the labels we have assigned above for each
descriptors for the loss calculation. We introduce
three cross entropy loss function for the proposed in-
teraction network.1) Part Loss (P
loss
) : Out of the two
assigned labels, the first one is used for part classifi-
cation. The mean of all the embeddings that belong
to a particular part is pass to a shared fully connected
layer (FC2) for classification. 2) POSM loss (G
loss
) :
The POSM loss is applied to classify the presence of
complete POSM using the global mean of all embed-
dings. 3) Embedding loss (E
loss
) : Additional embed-
ding classification loss is added to make the network
learn the difference between the wrong matched pairs
( False Positives) and the correct matched pairs ( True
Positives).
4 EXPERIMENTS AND RESULTS
In this section, we present quantitative results on the
methods present in the paper. We are using Super-
point as our baseline method. All the numbers are
reported on the test dataset as mentioned in section 3.
Our goal is to verify the presence of each part of
the template image in the test image. During evalua-
tion, as an input, we have a pair of test-template im-
ages and the annotation corresponding to all parts of
the template image. It’s a two step process. Our first
step involves the keypoint detection and descriptors
extraction from both, test and template image. We
have used pretrained Superpoint as a keypoint match-
ing algorithm in this step. To get the matched de-
scriptors pairs we have performed exhaustic nearest
neighbour search algorithm on extracted descriptors
of the images. The unmatched points and descrip-
tors are discarded from both the images. In the sec-
ond step, we have passed the matched descriptors pair
through our interaction network for verification. The
network verifies whether the descriptors correspond-
ing to parts are correctly matched or not. The network
predicts 1 if part is present otherwise 0.
Keypoint matching based approaches largely de-
pend on the quality of image. If the image is of poor
quality with low resolution it is very difficult for a
matching algorithm to give matches. In our dataset,
the quality of the test image is very poor as these are
images directly taken from the shop. It is hard for key-
point matching to give matches for all parts present in
the test image. We have evaluated our method in dif-
ferent scenarios
1. Taking Unmatched Part Count as Zero: As
mentioned above it’s hard for a matching algo-
rithm (in our case, Superpoint) to give matches for
all parts present in the test image, so in our eval-
uation we take the presence value corresponding
to those parts as 0. We have also calculated the
Superpoint accuracy in similar conditions The re-
sults are shown in table 3
Keeping this evaluation metric, we perform ex-
periments by taking the combination of different
losses and various interaction operations. While
our methods work best on the combination of sub-
traction, multiplication, mean on the individual
descriptor pairs and similarity value of two de-
scriptors. We also perform experiments using the
other operation concat and removing the similar-
ity score. Results are shown in table 2.
Using Keypoint Matching and Interactive Self Attention Network to Verify Retail POSMs
199

2. Removing the Unmatched Parts from Evalua-
tion: We observe a high number of false negatives
in our first evaluation ref. As mentioned in sec-
tion/ref our method, these high numbers of false
negatives are coming from all those parts which
have zero matches. Since these parts have zero
matches and our algorithm has no control over the
prediction of these parts. To check the perfor-
mance of our algorithm in a more accurate way
we have removed these parts from the evaluation
and calculate the accuracy. We have also calcu-
lated the Superpoint accuracy in similar condi-
tions. The results are shown in table 4.
3. Keeping Basic Heuristics on Part Count:
We hypothesize that if a network predicts the
presence of X or more parts of the template image
in the test image we can presume that all parts
of the template image are present. To show that
this hypothesis is true we add the heuristic on top
of the final output and compare our results. We
define the basic heuristics as
Out put part =
(
[1]*len(Np), len(Mp) ≥ len(Np)*P
[0]*len(Np), otherwise
Here, Np represents the list of total parts presents
in the template image, Mp is the parts with
matches. P is percentage value. In our dataset,
P = 0.2 gives the best number for both methods.
Results are shown in table 5.
5 CONCLUSION
We have established a framework for training of the
verification method over local feature matches. We
have presented a method to learn the interaction be-
tween the matched descriptor pairs. Our experiments
demonstrate that using the global context, local fea-
tures matching can be verified correctly. Further work
will investigate the handling of noise/ wrong matches
from the matching algorithm and make the verifica-
tion algorithm more robust.
REFERENCES
Arroyo, R., Jim
´
enez-Cabello, D., and Mart
´
ınez-Cebri
´
an, J.
(2020). Multi-label classification of promotions in
digital leaflets using textual and visual information.
In Proceedings of Workshop on Natural Language
Processing in E-Commerce, pages 11–20, Barcelona,
Spain. Association for Computational Linguistics.
Bai, M., Luo, W., Kundu, K., and Urtasun, R. (2016). Ex-
ploiting semantic information and deep matching for
optical flow. In European Conference on Computer
Vision, pages 154–170. Springer.
DeTone, D., Malisiewicz, T., and Rabinovich, A. (2018).
Superpoint: Self-supervised interest point detection
and description. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR) Workshops.
Fu, J., Liu, J., Tian, H., Li, Y., Bao, Y., Fang, Z., and Lu,
H. (2019). Dual attention network for scene segmen-
tation. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
3146–3154.
Harris, C., Stephens, M., et al. (1988). A combined corner
and edge detector. In Alvey vision conference, vol-
ume 15, pages 10–5244. Citeseer.
Hu, J., Shen, L., and Sun, G. (2018). Squeeze-and-
excitation networks. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 7132–7141.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International journal of computer
vision, 60(2):91–110.
Luo, W., Schwing, A. G., and Urtasun, R. (2016). Efficient
deep learning for stereo matching. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 5695–5703.
Radford, A., Narasimhan, K., Salimans, T., and Sutskever,
I. (2018). Improving language understanding by gen-
erative pre-training.
Rosten, E. and Drummond, T. (2006). Machine learning for
high-speed corner detection. In European conference
on computer vision, pages 430–443. Springer.
Rublee, E., Rabaud, V., Konolige, K., and Bradski, G.
(2011). Orb: An efficient alternative to sift or surf.
In 2011 International conference on computer vision,
pages 2564–2571. Ieee.
Talmi, I., Mechrez, R., and Zelnik-Manor, L. (2017). Tem-
plate matching with deformable diversity similarity. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, pages 175–183.
Tang, S., Andres, B., Andriluka, M., and Schiele, B. (2016).
Multi-person tracking by multicut and deep matching.
In European Conference on Computer Vision, pages
100–111. Springer.
Thewlis, J., Zheng, S., Torr, P. H., and Vedaldi, A. Fully-
trainable deep matching.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, Ł., and Polosukhin, I.
(2017). Attention is all you need. In Advances in
neural information processing systems, pages 5998–
6008.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In Proceedings of the IEEE
conference on computer vision and pattern recogni-
tion, pages 7794–7803.
Wu, Y., Abd-Almageed, W., and Natarajan, P. (2017). Deep
matching and validation network: An end-to-end so-
lution to constrained image splicing localization and
detection. In Proceedings of the 25th ACM interna-
tional conference on Multimedia, pages 1480–1502.
IMPROVE 2022 - 2nd International Conference on Image Processing and Vision Engineering
200

Yang, Z., Dai, Z., Yang, Y., Carbonell, J., Salakhutdinov,
R. R., and Le, Q. V. (2019). Xlnet: Generalized au-
toregressive pretraining for language understanding.
Advances in neural information processing systems,
32.
Using Keypoint Matching and Interactive Self Attention Network to Verify Retail POSMs
201
