
An Efficient Strategy for Testing ADAS on HiL Test Systems with
Parallel Condition-based Assessments
Christian Steinhauser
1 a
, Maciej Boncler
2 b
, Jacob Langner
1 c
, Steffen Strebel
2 d
and Eric Sax
1 e
1
FZI Research Center for Information Technology, Karlsruhe, Germany
2
Dr. Ing. h.c. F. Porsche AG, Stuttgart, Germany
Keywords:
Automotive Testing, Verification and Validation, Advanced Driver Assistance Systems, Autonomous Driving,
Automated Assessment, Test Strategy, Test Process.
Abstract:
On the way to full automation the number of Advanced Driver Assistance Systems (ADAS) and the system’s
Operational Design Domain (ODD) increase. This challenges today’s prevalent requirement-based testing
paradigm in the automotive industry, as for each requirement at least one test is derived. While virtual testing
offers scalability for large-scale testing, hardware integration-testing has to be performed under real-time
constraints. A significant part of the verification on the target hardware is performed on Hardware-in-the-
Loop (HiL) test systems. With the limited number of available HiL systems and their execution being bound
to real-time constraints, test time becomes a precious resource. In this work we demonstrate a novel test
strategy, that unites today’s requirement-based test process with new concepts for more efficient HiL testing.
Maintaining traceability throughout the development process is the main goal. The tests are split into stimuli
and evaluation, where only the stimuli are executed on the HiL. This enables parallel assessment of multiple
functionalities in one test execution. The concept has been implemented in a productive HiL environment at a
German car manufacturer and the evaluation shows benefits in test coverage, as well as reduced test runtime.
Moreover, it enables scenario based testing of Highly Automated Driving.
1 INTRODUCTION
Autonomous driving and electrification are the most
significant trends in the automotive industry (BMW
Group, 2020) (Daimler AG, 2018) (Volkswagen AG,
2020). On the way to fully autonomous driving,
Advanced Driver Assistance Systems (ADAS) repre-
sent an important milestone. By gradually integrating
more and more ADAS, such as adaptive cruise con-
trol (ACC) and automated lane keep assist (ALKA)
the vehicle is able to support the driver in longitu-
dinal and lateral driving tasks. Ensuring safety and
correct functionality of those systems is a challenging
task. For example, up to 150 sensors (Porsche Engi-
neering Magazin, 2018) are constantly monitoring the
vehicle’s internal state and the surrounding traffic.
Today’s vehicles can consist of more than 100
Electronic Control Units (ECU) (Jakobson, 2019).
Therefore, ADAS have to be tested in a systematic
a
https://orcid.org/0000-0001-8973-2758
b
https://orcid.org/0000-0003-4449-7875
c
https://orcid.org/0000-0003-4210-1056
d
https://orcid.org/0000-0002-4781-7937
e
https://orcid.org/0000-0003-2567-2340
way. At the integration level the correct functionality
of the ADAS are commonly verified in Hardware-in-
the-Loop (HiL) test systems as well as test drives in
prototype cars. Over the last decade, a requirement-
based test strategy has evolved within the develop-
ment process of ADAS. System requirements de-
scribe the system’s behaviour within its Operational
Design Domain (ODD) and have to be fulfilled by the
implementation of the system. In order to examine
the fulfilment of all requirements, a test specification
is derived for each ADAS which is then implemented
in systematic test cases. For deriving the test spec-
ification, the following principles are used: ‘no test
without a requirement’ and ‘at least one test for each
requirement’ (Sax, 2008). Defined tests are executed
in a systematic scheme. For each test case there is a
fixed set of preconditions, a fixed set of input stim-
uli and a corresponding expected output. After each
test step the system’s reaction to the stimuli is com-
pared with the expected result. For traceability pur-
poses all test cases within the test specification have
to be evaluated in each iteration of the development
process. Since HiL test systems are bound to real time
due to the usage of real ECUs, time is a strictly lim-
ited resource when executing tests. Therefore, evalu-
Steinhauser, C., Boncler, M., Langner, J., Strebel, S. and Sax, E.
An Efficient Strategy for Testing ADAS on HiL Test Systems with Parallel Condition-based Assessments.
DOI: 10.5220/0011081400003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 391-399
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
391

ating one requirement per test case is a very inefficient
way to perform the tests. In order to extract as much
information as possible from one test run this work
presents a novel testing strategy using parallel assess-
ments. Section 2 presents the theoretical background
and the related work. In section 3 we present the
concept for integrating parallel assessments in the es-
tablished testing process. Therefore, requirements for
the strategy and implementation are derived. Section
4 compares the new test strategy with the established
one. We provide a proof of concept and an evaluation
of the tests performed. In section 5 potential future
work is described.
2 THEORETICAL BACKGROUND
Testing is an important part of developing ADAS or
automotive software in general. To keep the devel-
opment costs low it is crucial to find errors as soon
as possible (Sax, 2008). Therefore, multiple steps of
software testing have been established in the automo-
tive development process. Figure 1 depicts the X-in-
the-Loop (XiL) methods within the V-Model for auto-
motive development (Sax, 2008). In the early phase of
the development process, the basic concept of specific
functions is tested with Model-in-the-Loop (MiL).
The goal of MIL is to find design errors as early as
possible. In the next phase, the implemented code
is tested with Software-in-the-Loop (SiL) to identify
and correct errors and bugs within the code itself. For
testing the proper function of the software integrated
on target hardware, Hardware-in-the-Loop (HiL) test
systems are used. There are multiple stages of HiL
test systems. At the component level, one ECU is
tested under real-time conditions. However, at the in-
tegration level there are multiple ECUs tested at the
same time. For example, on an ADAS-cluster HiL
all ECUs that are relevant for ADAS are integrated.
The remaining bus communication that is necessary
for the ECUs to function properly is simulated.
Alongside HiL testing there are also test drives
in prototype vehicles for parameter application. Fi-
nal validation of the software is conducted in the
full vehicle. The underlying concept is known as
requirement-based testing and will be explained in the
following section.
2.1 Requirement-based Testing
The requirement-based test strategy is a systematic
approach of defining the necessary tests, that need to
be performed in order to verify the intended function-
ality of a system. Test cases are systematically de-
System
Requirement
Analysis
System
Design
Preliminary
Software
Design
Detailed
Software
Design
Software Implementation
System
Integration
Transition
to Utilization
Software-in-
SW/HW
Requirement
Analysis
Software
Integration
Figure 1: V-Model for automotive development.
rived from the system’s requirements which define its
behaviour. One test case consists of preconditions and
various stimuli contained in tests steps with a corre-
sponding expected result of the system. In each step
the response of the System-under-Test (SuT) to the
stimuli is compared with the expected result and a test
verdict is derived. Typically, the results can either be
’pass’ or ’fail’. Test criteria are derived by a multi-
tude of methods like error guessing and equivalence
classes as described in the ISO 26262 standard (ISO,
2018). In addition the criteria are supplemented by
knowledge and experience. Test cases are collected
and organized in a test catalogue, which is also known
as the test specification. Within the test specification
the distribution onto the test systems like SiL, HiL or
full vehicle tests is defined.
2.2 Scenario-based Testing
Scenario-based testing is a promising approach for
testing HAD-functions and suggested by several re-
search projects (de Gelder and Paardekooper, 2017)
(Eberle et al., 2019) (Menzel et al., 2018) (Wang and
Winner, 2019). It was developed as an alternative to
the statistical proof of a HAD function’s safety, where
billions of miles without an accident have to be driven
(Wang and Winner, 2019) (Wachenfeld and Winner,
2016). According to Menzel et al. (Menzel et al.,
2018) scenarios can be described in three abstraction
levels. The first level is called ’functional scenarios’.
Functional scenarios represent the most abstract level.
They can be described in a linguistic formulation to
make a scenario understandable for humans. The sec-
ond abstraction level is ’logical scenarios’, where pa-
rameter ranges of state values, that represent the sce-
nario are added. The third level are ’concrete sce-
narios’ which are a specific instantiation of a logi-
cal scenario where a specific value of the state val-
ues is selected within the parameter range. For test-
ing, completion criteria for each scenario have to be
defined. To evaluate the correct functionality of the
SuT, parameter variations are suggested. The biggest
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
392

challenge for scenario-based testing is the identifi-
cation or generation of critical scenarios, which are
not part of the scenario catalogue. In contrast to the
requirement-based approach statistical aggregation of
the SuT’s behaviour throughout all tested scenarios is
suggested.
2.3 Related Work
In this section the main references on which our work
is based on are presented. The testing approaches pro-
pose parallel testing, that is aimed to evaluate multiple
assessments within a scenario. The basic concept of
those approaches is adopted and expanded to ensure
the usability in an established automotive testing pro-
cess.
Automotive System Testing by Independent
Guarded Assertions
Gustafsson et al. (Gustafsson et al., 2015) presented a
parallel testing approach on HiL test systems. It was
derived from the declarative testing approach(Triou
et al., 2009). The basic idea of independent guarded
assertions is the separation of state-changing stim-
uli and verdict-generating assertions. The so called
’guard condition’ continuously evaluates the state of
the SuT to make sure that the assessment is performed
only if the SuT is in an assessable state. The assess-
ment itself is performed if the ’guard condition’ is ful-
filled. The assessment is similar to the expected result
described in 2.1. This enables the parallel execution
of multiple assessments in one single test run. Flem-
str
¨
om et al. further enhanced Gustafsson’s approach
by proposing a process to transform requirements into
guarded assertions(Flemstr
¨
om et al., 2018a) (Flem-
str
¨
om et al., 2018b).
Automated Function Assessment in Driving
Scenarios
King et al. (King et al., 2019) proposed a similar
situation-based approach in the context of ADAS. In-
stead of purely relying on internal bus signals, ex-
ternal information from the simulation environment
is taken into account. This enables an evaluation on
the behavioural level of the vehicle. The authors fur-
ther subdivide the activation of an assessment into
several logical activation conditions. During a test
run, the fulfilment of the activation conditions is con-
stantly monitored by observers. The evaluation itself
is described by test conditions, that are performed if
the activation conditions are fulfilled. The goal of
this approach is to enable automated quality assess-
ment within digital test drives (Otten et al., 2018)
(Wohlfahrt et al., 2016), where a priori knowledge of
the traffic behaviour in the simulation is not available.
3 CONCEPT
Within the current test strategy a test case consists of
three phases: precondition (PRE), action (ACT) and
post conditions (POST). In addition there is the ex-
pected result (ER), which describes the expected out-
put of the SuT for a given set of stimuli. A simple ex-
ample is given to illustrate the current test procedure
in the context of ADAS. At first, the SuT is initiated
in a start-up phase. This includes loading the simula-
tion environment, resetting all fault-codes within the
ECU’s storage, the start-up of the vehicle within the
simulation, gear selection and finally acceleration up
to a desired speed. To bring the SuT in an assessable
state all conditions contained in PRE have to be ful-
filled. After that, the test itself begins. The system’s
response to a set of stimuli is compared with the ex-
pected result, which are executed in the ACT-Phase.
A test run ends with a tear down phase, which con-
tains stopping the vehicle, resetting ECUs and the ini-
tiation of a test protocol. The signals that are relevant
to the SuT are recorded and stored on a server, in case
further manual analysis by the developer is needed.
Thus, a test case is a mixture of test execution and as-
sessment of the scripted test steps. This means that
both the execution and the evaluation are performed
on the HiL test system. Hence, only one specific func-
tion is tested within a test case. This means that there
is a full test run for the evaluation of one single re-
quirement. Considering the time used for the initia-
tion and tear down of the HiL test system this is an
inefficient way of using the available HiL resources.
To address an increase in efficiency, the goals of the
proposed test strategies are:
• Increasing the test coverage extracting more infor-
mation from every test run performed on HiL test
systems
• Reducing usage of HiL resources by splitting test
run and evaluation
• Ensuring traceability by systematic mapping of a
requirement to a specific assessment
The fulfilment of the first and the second goal will
be discussed in section 4. The third goal is shown in
sections 3.5.
An Efficient Strategy for Testing ADAS on HiL Test Systems with Parallel Condition-based Assessments
393
3.1 Requirements for a Parallel
Condition-based Test Strategy
The testing approaches discussed in section 2.3 are
both based on separating the assessment of a SuT
and the test run itself. This enables parallel exe-
cution of multiple assessments within a single test
run. Gustafsson introduces an observer for assess-
ing a wider range of possible states. In traditional
approaches for example if the car is in reverse gear,
it is assessed if the reverse light is on. The reverse
light’s behaviour in other gears is not tested.
In King’s approach a similar observer is imple-
mented. It does not only evaluate the SuT’s inter-
nal signal but also external ground-truth data derived
from the simulation environment. By doing this, eval-
uating the SuT’s behaviour in a priori unknown sce-
narios is possible. However, from a test management
perspective those approaches lack of a structured re-
porting of the test results. In today’s requirement-
based approach each test run has to have it’s unique
ID. This is due to the fact, that for each requirement
at least one test is derived. To integrate a parallel test-
ing approach similar to King’s and Gustafsson’s in the
existing test process the following requirements have
to be fulfilled:
• Uniqueness:
Each assessment and each test run shall have a
unique ID. Each test run or assessment shall only
be defined once.
• Traceability:
It shall be possible to match each result of an as-
sessment with the corresponding test run. With
that the relevant test report with measurement data
and meta data is clearly traceable for further anal-
ysis of a test result.
Furthermore, unique test IDs are necessary for the in-
tegration in the existing test management tool chain,
that is based on the IDs. The IDs are, among others,
used for the synchronization among different tools or
for an automatic test case generation in the test au-
tomatisation tool.
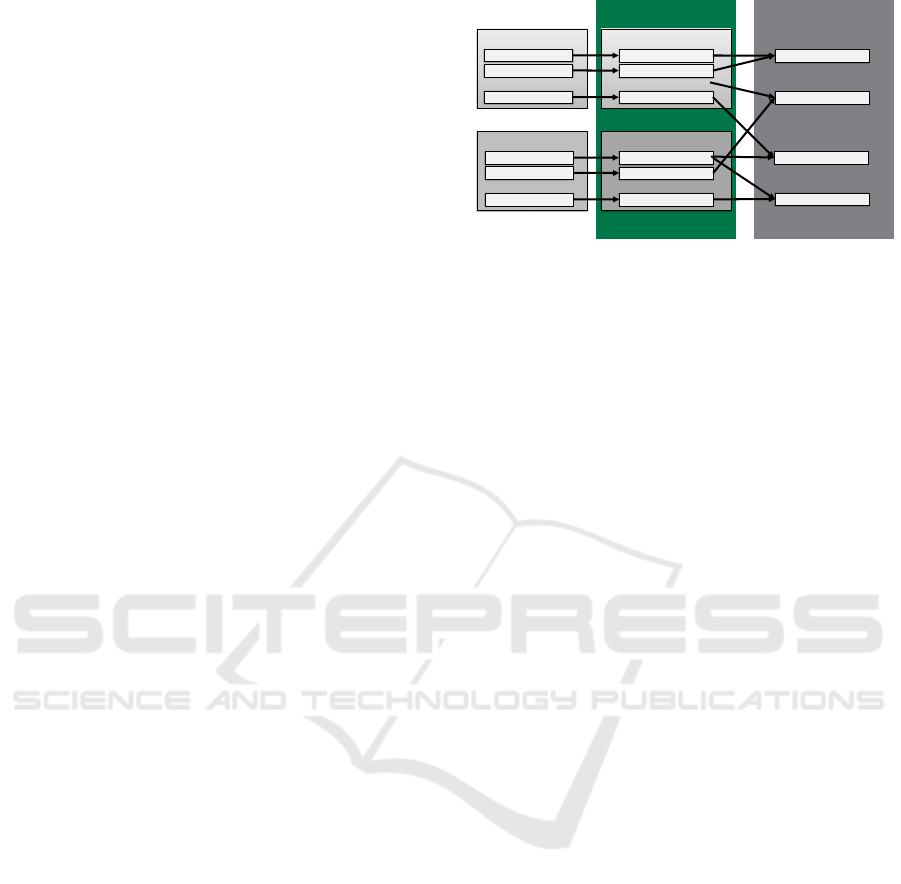
3.2 Condition-based Assessment
To extract more information out of a single test run,
a parallel, condition based test approach similar to
the approaches mentioned in 2.3 is used. In contrast
to Gustafsson’s and King’s approach, we propose an
offline assessment approach. Instead of implement-
ing observers, that constantly monitor the signals that
are relevant to the SuT, we record those signals. The
recorded signals are not limited to internal bus com-
Assessment Test Run
…
System Specification #1
Requirement #1.1
Requirement #1.2
Requirement #1.N
…
System Specification #N
Requirement #N.1
Requirement #N.2
Requirement #N.M
…
Assessment Specification #1
Assessment #1.1
Assessment #1.2
Assessment #1.N
…
Assessment Specification #N
…
Assessment #N.2
Assessment #N.M
Assessment #N.1
Scenario #1
Scenario #2
Scenario #5
Scenario #J
…
…
…
Figure 2: Derivation of Assessments.
munication, but also external signals provided by the
simulation environment. Since the assessments are
independent of the stimuli scripts, there has to be a
mechanism that only triggers an evaluation if the SuT
is in the corresponding state. This is ensured by a
logical expression called ’activation condition’. The
logical expression is derived from the specification
of each SuT. It is composed by signals that are rel-
evant for the specific function and their correspond-
ing values from the ECU or external signals from
the simulation environment. As depicted in figure 2
each requirement is evaluated with a corresponding
assessment. The assessments are then assigned to a
specific test run, which contains a concrete scenario.
As shown in figure 2 multiple assessments can be as-
signed to a single test run and an assessment can be
assigned to multiple test runs. This is important for
more complex ADAS, which have to be evaluated in
different situations or conditions. The evaluation of
the expected result is performed by ’test conditions’,
which are triggered by the activation conditions. The
naming of the conditions is adopted from King, due
to the same basic principle of situation detection. Fur-
thermore, this principle enables multiple evaluations
of the same assessment in different test runs, thus in-
creasing test coverage without additional test runs.
3.3 Separation of Test Run and
Assessment
In this section, we focus on the required traceability
of the test result. In the current test process each test
result has to be clearly matched to a specific test run
and has to have its unique ID. With that, it is always
possible to trace the relevant report with measurement
data and analyse the test run, if an error is identified.
To accomplish traceability within a parallel test ap-
proach, two classes are defined. We call them ’Test
Run’ and ’Assessment’:
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
394
Test Run
The class ’Test Run’ contains all information regard-
ing the test Run on the HiL test system. This in-
cludes a complete scenario description, which con-
tains all actions the SuT and other traffic participants
have to perform during simulation. Furthermore, the
complete description of the corresponding road topol-
ogy within the driving simulation is included. Ad-
ditional information regarding different entities like
number of traffic participants, objects and pedestri-
ans and their corresponding behaviour within the Test
Run is defined as well. Meta information like signals
that have to be recorded for this specific Test Run are
also part of the Test Run.
Assessment
Within the class ’Assessment’ the assessment of the
SuT’s behaviour is defined. This includes the for-
mal description in which conditions the system’s be-
haviour can be examined. Therefore, all relevant in-
ternal bus signals and external information from the
simulation environment have to be listed including
threshold values. With that, the activation condition
for the assessment can be derived. Furthermore, the
signals and corresponding signal ranges for the sys-
tem’s intended behaviour have to be specified within
the Assessment class.
Each Assessment corresponds to a specific sys-
tem requirement. To map the Assessments to the Test
Runs in which they shall be evaluated the Test Run-
Assessment specification layout is described in sec-
tion 3.5.
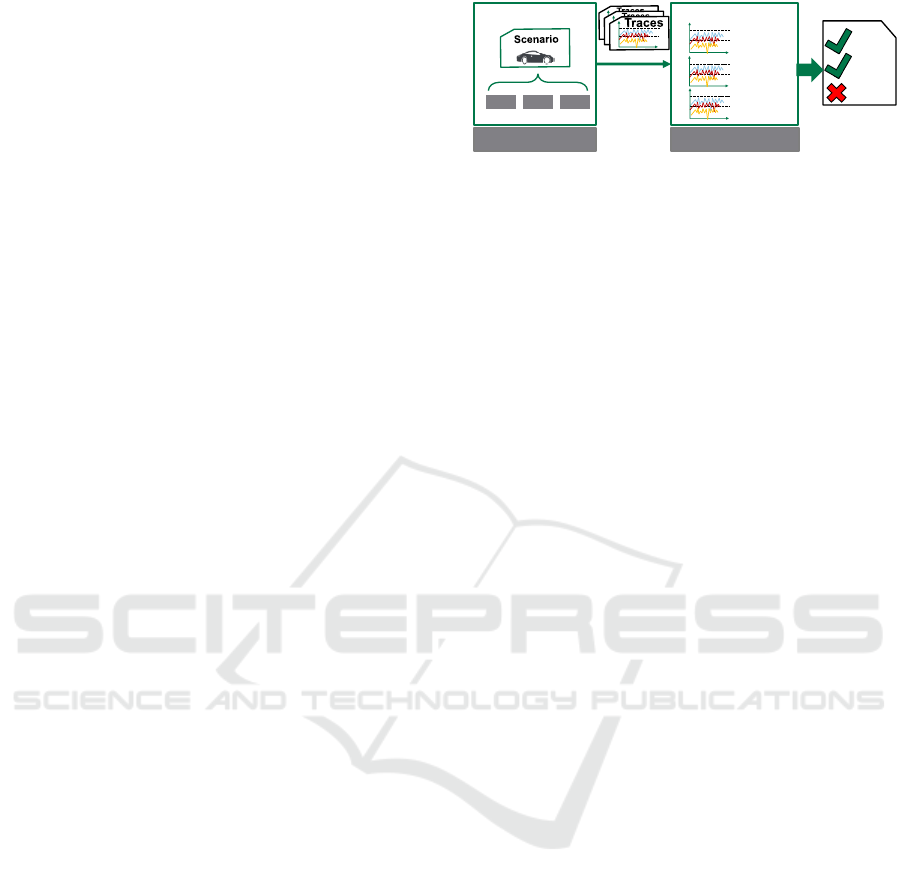
Allocation of Test Run and Assessment
As it can be seen in figure 3, after the simulation
is completed the traces are transmitted to an analy-
sis server, which Runs the assessment scripts. This
causes a reduction of HiL Run time, since the evalu-
ation is performed on a separate system. This is due
to the fact that the HiL test system is able to perform
the next simulation while the assessment scripts are
still evaluated on the analysis server. In addition, ex-
tensive video analysis for example for the evaluation
of the Human Machine Interface (HMI) in the instru-
ment cluster is not performed on the test system itself,
thus reducing the Runtime needed for a test Run.
3.4 Test Strategy
The combination of the Condition-based Assessment
(section 3.2) with the separation of Test Run and As-
sessment (section 3.3) is capable of optimizing the us-
Eval. 1
Eval. 2
Eval. 3
Analysis-ServerHiL-Test-System
PRE ACT POST
Eval. 1
Eval. 2
Eval. 3
Real-Time Offline Assessment
Figure 3: Seperation Test Run and Assessment.
age of the HiL test system in two ways. Depending on
the goal of the optimization, either the number of test
results per Assessment or the test capacity per devel-
opment cycle can be increased.
Strategy for Increasing the Number of
Assessments per Requirement
To increase the number of evaluated requirements, the
corresponding assessment can be allocated to multi-
ple Test Runs. If the assessment is evaluated on Test
Runs, which contain a set of stimuli that differs from
the initial Test Run, the test coverage is increased. In
the previous requirement-based strategy there was a
clear one-to-one relationship between a Test Run and
its evaluation. However, by separating the assessment
and Test Run it is possible to perform one assessment
in multiple Test Runs, as shown in the bottom right
in figure 2. This strategy allows an increase in test re-
sults while the number of Test Runs remains the same.
Strategy for Increasing Testing Capacity
In the requirement-based strategy explained in section
2.1 there needs to be one test per requirement. How-
ever, it is possible that multiple systems need the same
sequence in the ACT part to evaluate their correct be-
haviour. This leads to redundant Test Runs in a de-
velopment cycle. Since HiL test systems have limited
capacity due to real-time constraints, it is favourable
to eliminate redundant Test Runs while maintaining
at least one assessment per requirement. Therefore,
multiple assessments can be allocated to one specific
Test Run as shown in the top right in figure 2. The
strategy eliminates redundant Test Runs by identify-
ing similar sequences of test steps. The identified se-
quences of test steps are merged into a single Test
Run.
3.5 Test Specification Layout
For each driving function, for example LKA or ACC,
a test specification is defined. The test specification
for the separation of Test Run and Assessment is di-
vided in two chapters: Chapter 1 contains all Test
Runs, that are relevant to the specific SuT. Each Test
An Efficient Strategy for Testing ADAS on HiL Test Systems with Parallel Condition-based Assessments
395
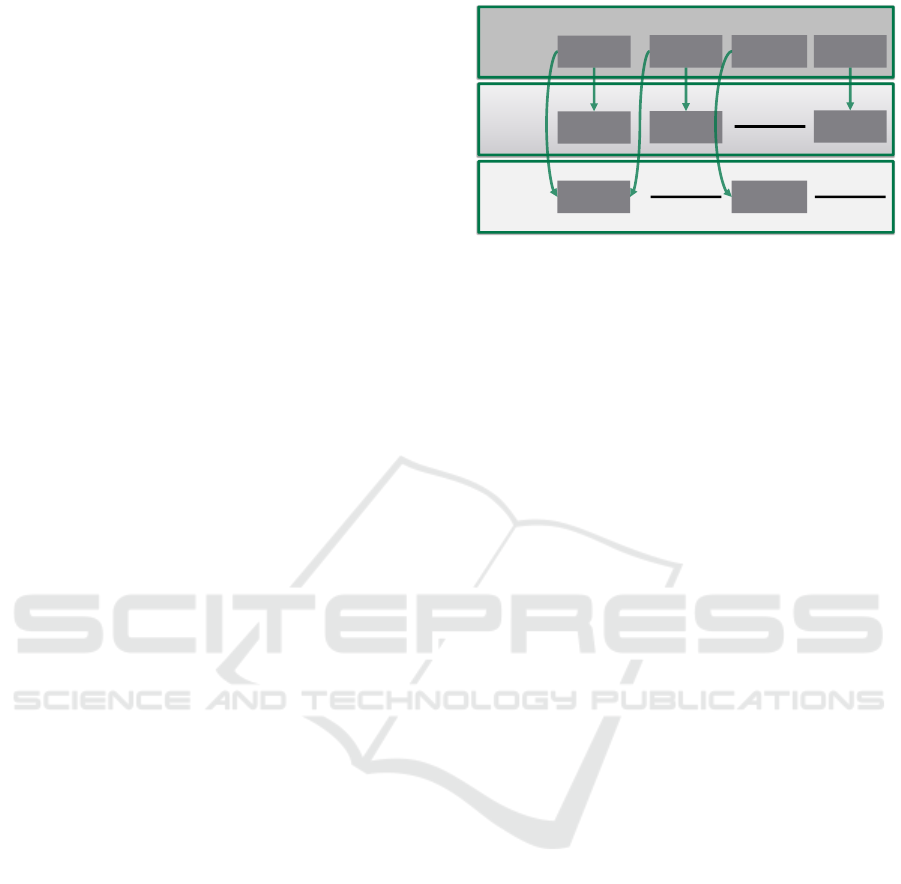
Run is represented as a module. Modules describe
entities within a chapter. A module has its unique ID.
The second chapter contains all Assessments. In con-
trast to the first chapter, each Assessment is a chapter
by itself with its corresponding ID. The Assessment’s
definitions are denoted in the annotations of the chap-
ter. For consistent and traceable mapping of each As-
sessment to a Test Run modules are introduced within
the chapter. Each module has its own unique ID. The
module’s IDs are composed of the Test Run’s ID and
the Assessment’s ID. Therefore, the Assessment is
linked to the Test Run. The layout can be pictured
as follows:
• Chapter Test Run
– Module: Test Run ID 1
– Module: Test Run ID 2
– ...
– Module: Test Run ID N
• Chapter Assessment
– Assessment ID 1
*
Module: Assessment ID 1 Test Run ID 1
*
Module: Assessment ID 1 Test Run ID 2
*
...
*
Module: Assessment ID 1 Test Run ID M
– Assessment ID 2
*
Module: Assessment ID 2 Test Run ID 3
*
Module: Assessment ID 2 Test Run ID 8
– Assessment ID N
*
Module: Assessment ID N Test Run ID 4
*
Module: Assessment ID N Test Run ID M
With the unique modules for each assignment the test
automation tool is able to generate test scripts for each
Assessment. With the assignment, triggering of an
assessment-request in a specific Test Run can be ac-
complished automatically.
With this concept, each Test Run and Assessment
can be maintained and updated independently. This
increases the manageability by test engineers. More-
over, the Separation of Test Run and Assessment
enables the integration of scenario completion crite-
ria within the scenario-based test approach. Specific
completion criteria can be added as new Assessments,
enabling traceability, comparability and reusability
throughout different scenarios.
4 APPLICATION AND
EVALUATION
To provide a proof of concept for the proposed strat-
egy from section 3 a test specification of a prototype
Original Test Case
Test Run
Assessment
Pre
Act
ER Post
Pre
Post
ER
Pre
Act
Activation Condition Test Condition
Figure 4: Decomposition in Test Run and Assessment.
ADAS is transformed into the novel condition-based
strategy. The prototype ADAS is already integrated in
a HiL test system and is tested in the current develop-
ment process. The initial test specification, HiL test
system, SuT and implementation of the test cases are
all real-life examples. For the proof of concept, a set
of 15 test cases is chosen. It reflects the content of the
complete test specification, but not the number of test
cases of the ADAS. Therefore, the set contains basic
tests, such as ’function availability’, as well as tests
for complex requirements, like deployment of inter-
vention mechanisms. The aim is to ensure the trans-
ferability of the proof-of-concept’s results to a real
testing process in the automotive industry.
4.1 Proof of Concept
The original test specification is analysed and re-
designed according to the separation of Test Run and
Assessment described in section 3.3. Each original
test case refers to a specific requirement, thus one test
run and one Assessment is derived. The combined
content corresponds directly to the original testcase.
The decomposition of the original test specification is
visualized in figure 4. It depicts that the PRE, ACT
and POST parts for the specification of the test run
can be directly inherited from the original test case.
In the test run there is no function-relevant expected
result because all assessments will be performed of-
fline with the traces recorded from the test run. For
future implementations, the correct execution of the
test run or the proper storage of all relevant traces
can be examined within test runs. Thus, their result
should only be seen as verification of a correct test
execution. For example, if there were any exceptions
by running the test script itself or if there was an er-
ror while saving files. The most significant changes
in the test specification for the separation of Test Run
and Assessment are necessary for the definition of ac-
tivation conditions within the Assessments. Figure 4
depicts that the activation conditions are derived from
the PRE and ACT parts of the original test case. In
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
396
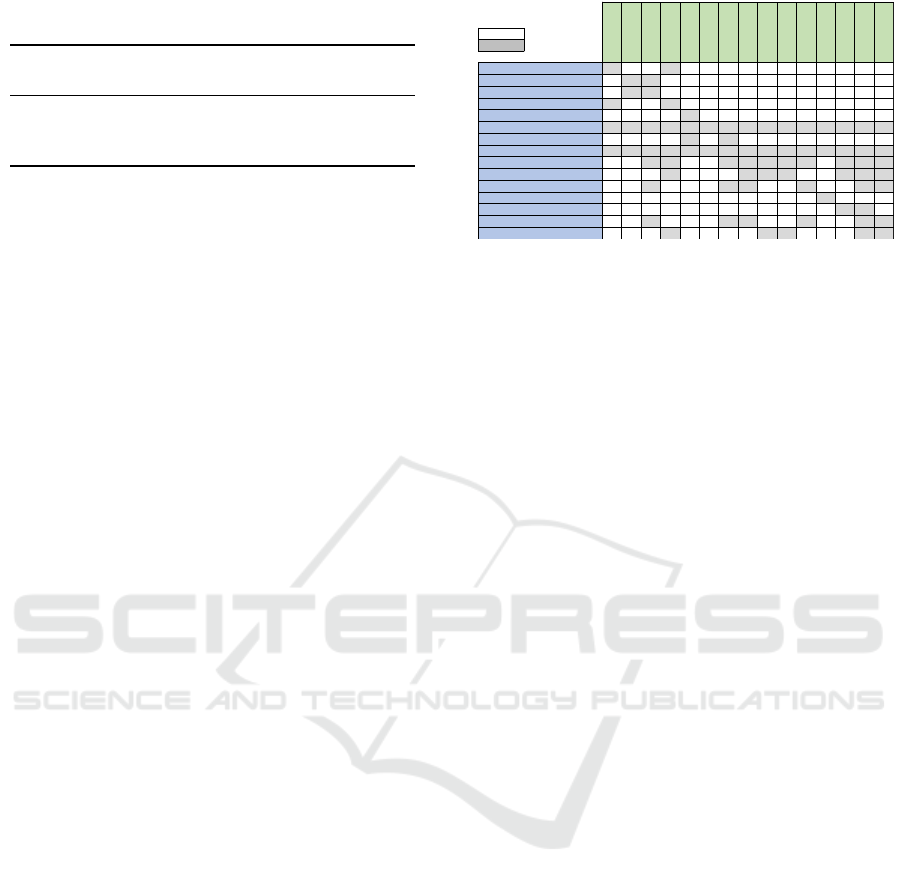
Table 1: Evaluation of test coverage and runtime.
Original Condition-Based
Test Case Assessment
Run Time 47 min 09 s 46 min 44 s
Number of
15 77
Evaluations
addition, the activation condition is supplemented by
information from the requirements of the SuT as de-
scribed in section 3.2. The fulfilment of completeness
of activation conditions is an especially challenging
part (Gustafsson et al., 2015). Therefore, additional
information from analysing the SuT’s intended be-
haviour is used to ensure proper activation. The aim is
to find the relevant section within the recorded traces
from the test run to perform the evaluation part of the
assessment. The evaluation part of the Assessment
itself can be directly inherited from the former Ex-
pected Result (ER). According to the layout presented
in section 3.5, a total number of 225 modules are de-
fined in the test specification.
Evaluation of the Run Time
To evaluate the difference in test run time, there are
as few changes as possible done in the original test
case implementation to extract a corresponding Test
run. The ER part is removed from the Test run’s
implementation and moved to the Assessment. With
the Test runs and Assessments implemented, two test
suits are created. A test suite is a group of tests that
should be successively, automatically conducted by
the test automation tool. The first test suite contains
the 15 original test cases. The second one contains the
15 Test runs and 225 Modules. We did not conduct
any preselection of Assessments for Test runs and ex-
ecuted all defined modules implementing every As-
sessment for every Test run.
The test suites are executed one after another on
a ADAS-cluster HiL test system and their execution
time is tracked. Another chosen metric is the number
of evaluations. It shows how often the activation con-
dition of the Assessment is fulfilled. Those are then
denoted as significant test results. Otherwise, the test
result of a module remains ’open’ and does not bring
any further information about the fulfilment of the re-
spective requirements.
The results in table 1 show, that the Separation of
Test Run and Assessment is beneficial according to
both of the chosen metrics.
However, the improvement in the test suite’s exe-
cution time, of 1%, should be further evaluated with a
bigger test suite. The authors expected a bigger im-
provement due to the parallel computing. The ob-
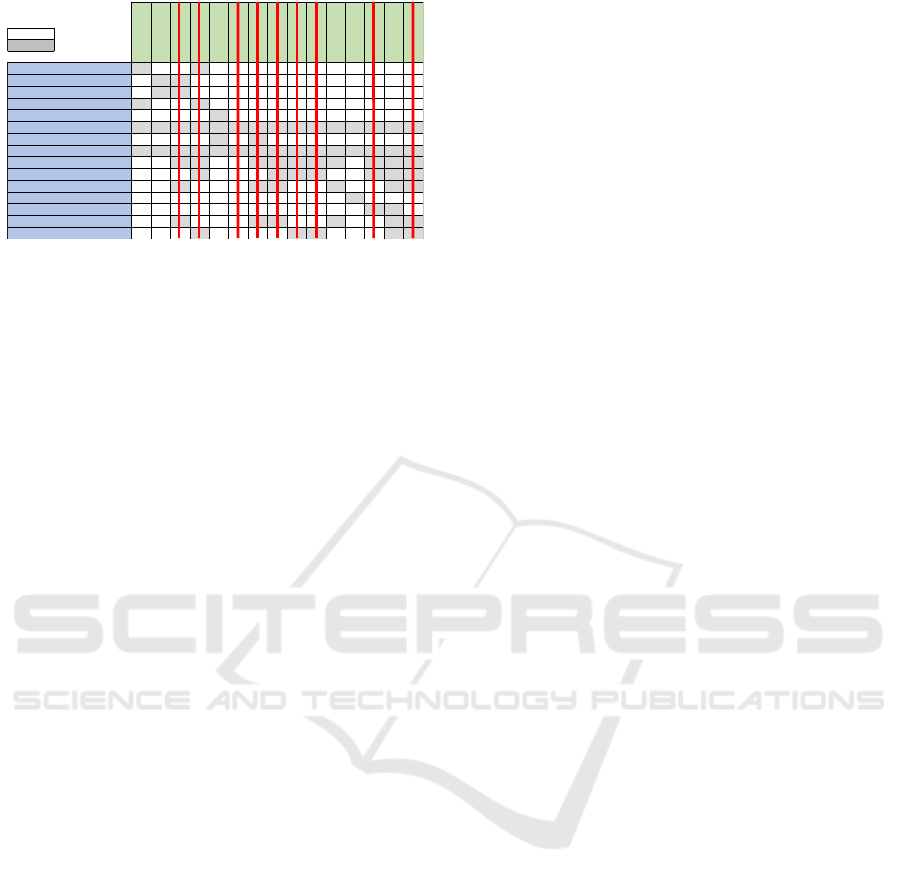
Open
Activated
1 1
1 1
1 1
1 1
1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1
1
1 1
1 1 1 1 1 1
1 1 1 1 1
Test Run #4
Test Run #3
Test Run #2
Test Run #1
Test Run #9
Test Run #8
Test Run #7
Test Run #6
Test Run #5
Test Run #10
Test Run #15
Test Run #14
Test Run #13
Test Run #12
Test Run #11
Assessment #7
Assessment #1
Assessment #2
Assessment #3
Assessment #4
Assessment #5
Assessment #6
Assessment #14
Assessment #15
Assessment #8
Assessment #9
Assessment #10
Assessment #11
Assessment #12
Assessment #13
Figure 5: Activation matrix.
served difference might be a result of the run time
fluctuations in the test system. Another point worth
to mention is that, although only 77 modules could
be successfully evaluated, all 225 modules were pro-
ceeded during the run of the test suit. Elimination of
these unproductive runs of the modules might lead to
further time improvements.
Evaluation of Test Coverage
The increase of the test coverage is on the other hand
undisputable. There is an increase of 433% in the
amount of the significant test results observed. The
distribution of the additional evaluation can be seen
in figure 5 which we call the ’activation matrix’. The
columns of the activation matrix correspond to the
Test runs and the Assessments are shown in the rows.
Modules are depicted as single cells of the matrix. If
the cell x
i, j
is marked as ’activated’, the activation
condition of the Assessment of the row i has been
fulfilled during the test run of the Test run in the col-
umn j and the result for the module is successfully de-
termined. The results that would have been obtained
with the use of an original test strategy are to be seen
on the main diagonal of the activation matrix. As it
to be seen in the activation matrix, the additional re-
sults are unevenly distributed over the Assessments
and Test runs. Test runs that were initially aimed to
prove complex requirements usually have a high num-
ber of activated Assessments. On the other hand, the
Assessments for the complex requirements are only
rarely activated outside of their corresponding Test
run. An example for such test cases are #4, #7 and
#13. The Assessments for basic requirements, like
’function activation’ or ’function passivation’ tests,
are activated most frequently, see Assessments #6 and
#8. Those two are actually activated in all of the ex-
amined Test runs. Worth to mention is that in Test run
#6 only those two Assessments are activated. It can
be assumed, that this test case brings very little added
value to the test process and might be neglected to
optimize the whole process.
An Efficient Strategy for Testing ADAS on HiL Test Systems with Parallel Condition-based Assessments
397
Open
Activated
1 1
1 1
1 1
1 1
1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1 1 1 1
1 1 1 1 1 1 1
1 1 1 1 1 1
1
1 1
1 1 1 1 1 1
1 1 1 1 1
Test Run #4
Test Run #3
Test Run #2
Test Run #1
Test Run #9
Test Run #8
Test Run #7
Test Run #6
Test Run #5
Test Run #10
Test Run #15
Test Run #14
Test Run #13
Test Run #12
Test Run #11
Assessment #7
Assessment #1
Assessment #2
Assessment #3
Assessment #4
Assessment #5
Assessment #6
Assessment #14
Assessment #15
Assessment #8
Assessment #9
Assessment #10
Assessment #11
Assessment #12
Assessment #13
Figure 6: Optimization of required Test Runs.
Optimizing the Number of Test Runs
The proposed strategy of separating the Test Run and
Assessment can also be used to optimize the number
of Test Runs which are performed on the HiL test sys-
tem. For optimizing the number of Test Runs each
Assessment should be evaluated at least one time to
ensure test coverage of 100% for each requirement.
Figure 5 shows that with this approach, each assess-
ment is evaluated multiple times. This is due to the
fact that the Test Runs performed are similar to each
other, thus leading to activations even if they were not
intended in the original test case. Figure 6 shows that
in this case 9 of 15 Test Runs can be eliminated, while
still evaluating each assessment. This leads to a re-
duction of required test capacity of 60%. The exact
achievable improvements in overall test capacity de-
pend on the initial definition of test specification as
well as the whole testing strategy. Different results
can be achieved when data from a single Test run is
used by Assessments defined for a single ADAS or
multiple functions in the vehicle. Furthermore, the
possibility of combining tests depends on available
HiL test systems and their design.
Comparison with the Traditional Test Strategy
Compared to the traditional requirement-based test
strategy, the major drawback of the proposed strategy
is an increased effort for designing the activation con-
dition of each assessment. However, if the require-
ments of the SuT are available to the test engineer,
it is possible to derive the activation condition. The
benefit of the proposed test strategy is a more flexi-
ble and efficient overall test process. It can either be
used to increase the test coverage or to increase test
capacity while at least maintaining full coverage of
each requirement. From the test management view,
the novel strategy establishes a clear one-to-one rela-
tionship from a requirement to an assessment. This
leads to a significant increase on traceability, since
each assessment with its corresponding test run can
be identified clearly.
4.2 Application on Productive Test
Specifications
To further investigate the benefit of the proposed strat-
egy, it is used to optimize test specifications that are
used on a productive HiL system for evaluating pro-
totype ADAS functions. In addition, we checked if
the concept can be applied to the body domain, where
for example door locking mechanisms or crash reac-
tions are tested. Finally, we applied the strategy to a
HiL system, where functions of the drivetrain domain
are tested. The initial test specifications are developed
with the traditional requirement-based strategy. Since
the test coverage provided by the initial test specifica-
tion is already sufficient, the optimization of the test
capacity is performed. Table 2 shows the potential for
reducing the required test capacity for each specifica-
tion. On the first column, the initial required number
of tests is presented. The second column shows the
required tests runs, if the novel strategy is applied.
The third row shows the reduction of test runs in per-
cent. The Authors note, that the number of test cases
presented in table 2 only represent a fraction of the
overall tests efforts conducted by the manufacturer.
The results show that the potential of reducing the
required test capacity is highly dependent on the ini-
tial definitions of the test cases. The overall improve-
ment is at 21, 5% in required test runs. However, the
potential of reducing the required test capacity dif-
fers between the specifications. For example, com-
pared with the specification of ADAS there is a higher
potential than within the drivetrain specification (see
row two and three in table 2). To further investigate
the overall potential of reduction, more test cases for
every specification have to be considered. The achiev-
able result also depends on the original test specifica-
tion that is to be adopted. The optimum might have
already been achieved by aggregation of requirements
in the single test case. In that case, the proposed
method does not bring significant improvement in the
overall run time. However, it significantly improves
the traceability within the test process, as each re-
quirement might be evaluated in an independent mod-
ule, instead of test result aggregation in a classic test
case.
5 CONCLUSION AND OUTLOOK
The presented strategy of separating the Test Run and
Assessment has been proven to optimize the usage of
available HiL test system resources. With this novel
strategy for HiL testing, either a significant increase in
test coverage or a reduction in required test run time
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
398

Table 2: Results of the evaluation.
Original Test Cases Optimized Test Runs Reduction of Test Runs
Specification ADAS 205 182 11.2%
Specification Drivetrain 46 19 41.3%
Specification Body Domain 511 397 22.3%
Overall 762 598 21.5%
can be achieved. Due to the separation of Test Run
and Assessment and parallel computing, minor reduc-
tion of runtime of a test suite is possible. The pro-
posed strategy has been implemented and evaluated
on a productive HiL system at a German car man-
ufacturer. The authors see potential for further run
time improvements. The strategy optimizes the test
capacity by finding redundant test runs which are a
result of the original requirement-based development
and test process. The authors see the possibility to
find an optimized set of test runs by analysing the test
steps that are needed to test each specific requirement.
This could lead to an optimal test run of a specific set
of requirements. Therefore, optimization methods for
the automated reduction of test run time are to be fur-
ther investigated. In addition, test management meth-
ods like finding the compromise between the neces-
sary run time at the HiL test system and achieved test
coverage are subjects of further work of the authors.
REFERENCES
BMW Group (2020). Investor presentation.
Daimler AG (2018). Corporate presentation.
de Gelder, E. and Paardekooper, J.-P. (2017). Assessment
of automated driving systems using real-life scenar-
ios. In 2017 IEEE Intelligent Vehicles Symposium
(IV). IEEE.
Eberle, U., Hallerbach, S., Mannale, R., Kramer, B., Neu-
rohr, C., Steimle, M., and Amersbach, C. (2019). Pe-
gasus final event and symposium - the pegasus method
for safeguarding automated driving: What else is
needed?
Flemstr
¨
om, D., Enoiu, E., Azal, W., Sundmark, D., Gustafs-
son, T., and Kobetski, A. (2018a). From natural
language requirements to passive test cases using
guarded assertions. In 2018 IEEE International Con-
ference on Software Quality, Reliability and Security
(QRS). IEEE.
Flemstr
¨
om, D., Gustafsson, T., and Kobetski, A. (2018b).
A case study of interactive development of passive
tests. In Proceedings of the 5th International Work-
shop on Requirements Engineering and Testing - RET
'18. ACM Press.
Gustafsson, T., Skoglund, M., Kobetski, A., and Sundmark,
D. (2015). Automotive system testing by indepen-
dent guarded assertions. In 2015 IEEE Eighth Inter-
national Conference on Software Testing, Verification
and Validation Workshops (ICSTW). IEEE.
ISO (2018). 26262 Road vehicles – Functional safety.
Jakobson, O. (2019). Vcc complete hil rigs meeting our
next generation corebased service oriented architec-
ture, dspace world conference, 2019.
King, C., Ries, L., Kober, C., Wohlfahrt, C., and Sax, E.
(2019). Automated function assessment in driving
scenarios. In 2019 12th IEEE Conference on Software
Testing, Validation and Verification (ICST). IEEE.
Menzel, T., Bagschik, G., and Maurer, M. (2018). Scenar-
ios for development, test and validation of automated
vehicles.
Otten, S., Bach, J., Wohlfahrt, C., King, C., Lier, J.,
Schmid, H., Schmerler, S., and Sax, E. (2018). Auto-
mated assessment and evaluation of digital test drives.
In Zach
¨
aus, C., M
¨
uller, B., and Meyer, G., editors,
Advanced Microsystems for Automotive Applications
2017, pages 189–199, Cham. Springer International
Publishing.
Porsche Engineering Magazin (2018). ”testing”, 01/2018.
Sax, E. (2008). Automatisiertes Testen Eingebetteter Sys-
teme in der Automobilindustrie. Hanser Verlag,
M
¨
unchen.
Triou, E., Abbas, Z., and Kothapalle, S. (2009). Declarative
testing: A paradigm for testing software applications.
In 2009 Sixth International Conference on Informa-
tion Technology: New Generations. IEEE.
Volkswagen AG (2020). Unicredit kepler cheuvreuxgerman
corporate conference. Presentation.
Wachenfeld, W. and Winner, H. (2016). The new role of
road testing for the safety validation of automated
vehicles. In Automated Driving, pages 419–435.
Springer International Publishing.
Wang, C. and Winner, H. (2019). Overcoming challenges of
validation automated driving and identification of crit-
ical scenarios. In 2019 IEEE Intelligent Transporta-
tion Systems Conference (ITSC). IEEE.
Wohlfahrt, C., Schmerler, S., Schmid, H., and Lier, J.
(2016). Von systematischer absicherung zur digi-
talen erprobungsfahrt. 6. Fachkonferenz AUTOTEST,
Stuttgart.
An Efficient Strategy for Testing ADAS on HiL Test Systems with Parallel Condition-based Assessments
399
