
A Data-driven Energy Estimation based on the Mixture of Experts
Method for Battery Electric Vehicles
Patrick Petersen
a
, Thomas Rudolf
b
and Eric Sax
c
FZI Research Center for Information Technology,
Haid-und-Neu-Straße 10-14, 76131 Karlsruhe, Germany
Keywords:
Battery Electric Vehicle, Energy Estimation, Machine Learning.
Abstract:
Battery electric vehicles (BEVs) are an immediate solution to the reduction of greenhouse gas emissions.
However, BEVs are limited in their range by the battery capacity. An accurate estimation of BEV’s range and
its energy consumption have become a significant factor in eliminating customers “range anxiety”. To over-
come range anxiety, advanced algorithms can predict the remaining capacity, estimate the range and inform
the driver. Algorithms need to consider various influencing factors for their range estimation. A crucial part
for an accurate range estimation is the energy consumption modeling itself. Thus, machine learning-based
approaches are highly investigated which are able to learn nonlinear relations between relevant features and
the energy consumption. In this paper, we propose a data-driven approach for the energy estimation of BEVs
by utilizing ensemble learning to achieve a feature-specific estimation. In this paper, we trained neural net-
works on different road types independently. We improve the overall estimation by combining models via
the mixture of experts method compared to a monolithic trained neural network. The results demonstrate that
specialized neural networks for the energy estimation of BEVs are beneficial for the energy estimation. This
approach contributes to reducing range anxiety and therefore helping toward elevated adoption of BEVs.
1 INTRODUCTION
The electrification of the automotive industry has be-
come the solution for future sustainable transport and
contributes to the reduction of air pollution and the
dependency on fossil fuels (Arif et al., 2021). Es-
pecially BEVs have become popular as alternative
for conventional internal combustion engine vehicles.
The reason for this is that BEVs offer zero local
emissions in combination with reduced noise pollu-
tion (Mahmoudzadeh Andwari et al., 2017; Sanguesa
et al., 2021; Hua et al., 2021). Due to their simpler de-
sign with regard to required parts for building them,
they are easier and cheaper to build, easier to maintain
and moreover more efficient than combustion vehi-
cle counterparts (Sanguesa et al., 2021). Despite the
environmental benefits of BEVs, customers are still
reluctant to fully accept and adept the electrification
trend in the transport sector. The reason for this cus-
tomer behavior is the limited charging infrastructure
and lower driving range of BEVs (Eisel et al., 2016;
a
https://orcid.org/0000-0003-3203-5470
b
https://orcid.org/0000-0002-6020-2611
c
https://orcid.org/0000-0003-2567-2340
Thorgeirsson et al., 2020). This causes one of the ma-
jor concerns of drivers, called ”range anxiety”, which
is defined as the anxiety that drivers experiences when
worrying about whether the battery of their BEVs
runs out of power before arriving at the destination
or before a suitable charging point is reached (Noel
et al., 2019). In consequence, automakers are expand-
ing the range of BEVs by incorporating higher density
batteries and advanced technology to reduce charg-
ing times as well as support the deployment of appro-
priate charging infrastructure. However, drivers still
do not fully trust the displayed range of their vehicle,
which leads to a safety margin of roughly 27% (Yuan
et al., 2018). To achieve greater customer acceptance
of sustainable electrified mobility and trust in the dis-
played range, an accurate estimation of the remaining
range of BEVs is essential to eliminate range anxiety
and increase the everyday usability. An accurate es-
timation of the energy consumption is also important
for the whole energy management strategy of BEVs
(Rudolf et al., 2021). However, determining the en-
ergy consumption and estimating range remains is a
non-trivial task. The actual energy consumption of a
BEV is influenced by many factors such as driving
384
Petersen, P., Rudolf, T. and Sax, E.
A Data-driven Energy Estimation based on the Mixture of Experts Method for Battery Electric Vehicles.
DOI: 10.5220/0011081000003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 384-390
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

style, road topology, weather and traffic conditions.
Thus, for an accurate estimation, advanced algorithms
are required to take all these factors into account and
try to reduce uncertainties for the estimation (Krup-
pok et al., 2018).
Current estimation algorithms utilize data-driven
methods such as machine learning to accurately es-
timate the energy consumption of BEVs. Often, a
single monolithic neural network architecture with re-
spect to the available data features is used. However,
over the last couple of decades, research has shown
that combining multiple machine learning models
have a beneficial impact on the predictive perfor-
mance compared to a single model (Sagi and Rokach,
2018).
Ensemble learning has already been used for en-
ergy estimation BEVs (Chung et al., 2019; Ullah
et al., 2021). Each model of the ensemble approach
is trained on the same data, thus each model is able
to give an overall estimation in every upcoming sit-
uation. The final estimation result is computed by
combining the results of each individual model esti-
mations. However, no detailed studies have yet been
performed how ensemble learning can benefit if each
individual model is specialized for certain conditions
e.g. road types or driver-styles. Thus, the goal of this
paper is to extend the mentioned related work by pre-
senting a methodology on how specialized neural net-
works can be utilized in an ensemble learning manner
for the energy estimation of BEVs.
The remaining sections are set out as follows: A
literature review on related works is presented in sec-
tion 2. In section 3 we present our methodology for
utilizing an ensemble neural network for the energy
consumption estimation specialized on road types. In
section 4, we show and discuss results of our imple-
mented energy consumption estimation method and
provide results and discussion. Finally, section 5
gives concluding remarks and an outlook.
2 ENSEMBLE LEARNING
Ensemble learning is a field of extensive research,
showing potential performance increment for estima-
tion applications. In general, the primary concept
of ensemble learning is “the wisdom of the crowd”
meaning that, based on the implemented ensemble
learning methods, the predictions of several base
models are combined for a final prediction. Ensem-
ble learning can be either homogeneous or heteroge-
neous. A homogeneous ensemble is a collection of
base models of the same type built on different data
sets, whereas a heterogeneous ensemble is a collec-
tion of base models of different types built on the
same data set. In the following we want to give a
brief introduction to four common ensemble learning
methods (bagging, boosting, stacking and mixture of
experts) (Zhang and Ma, 2012). Describing their in-
dividual approach on how base models are used for
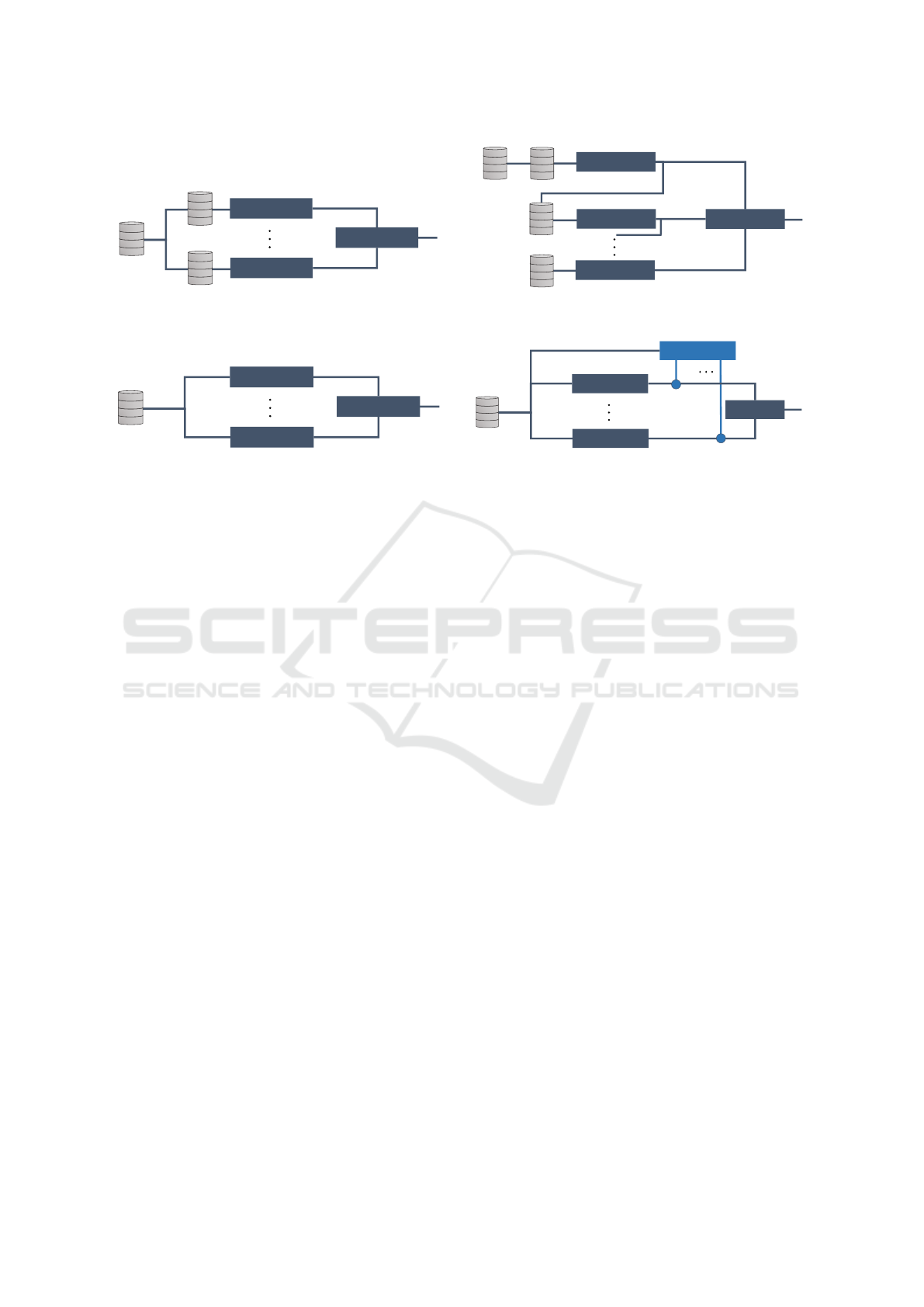
improving the final prediction. Figure 1 shows an
overview of the common ensemble learning methods.
Bagging
Bootstrap aggregating, or more commonly known by
the acronym bagging, belongs to the homogeneous
ensemble learning methods (Breiman, 1996). It cre-
ates individual base models M
1
, . . . , M
n
for its en-
semble by training each model on a random dis-
tributed subset of the data. However, sampling is
done with replacements, thus samples are likely to
appear more than once. The final output y(x) is re-
trieved by combining the outputs of each base models
M
1
(X), . . . , M
n
(X) (see Figure 1a). For classification,
this can be done by a simple majority vote for class
c ∈ C (see the following equation):
y(x) = arg max
c∈C
n
∑
i=1
1(M
i
(x) = c) (1)
For regression, the final output y(x) is retrieved via
averaging each individual output, as seen in the fol-
lowing equations:
y(x) =
1
n
n
∑
i=1
M
i
(x) (2)
Boosting
Boosting revolves around the idea of creating a
“strong” learner from a set of “weak” homogeneous
learners (Schapire, 1990; Freund and Schapire, 1999).
A weak learner is a model which achieves an accuracy
slightly better than random guessing. On the other
hand, a strong learner refers to a model which pro-
duces close to perfect outputs. For applying the boost-
ing method, models are trained sequentially (see Fig-
ure 1b). The first weak learner is trained on a random
subset from the data. Every following weak learner
is trained on the previous output, thus trying to cor-
rect its predecessors. This is done by redistribution
of the previous weights of the preceding weak learn-
ers, to focus the resources of the following models
on tougher data for the output. A strong learner uses
weighted aggregation of the particular outputs of each
weak learner to get the final output. Adaptive boost-
ing (AdaBoost) is a popular representative for the en-
semble learning boosting method. It uses a weighted
majority vote, which weights w
1
, . . . , w
n
are based on
the premise of giving the more accurate weak learner
A Data-driven Energy Estimation based on the Mixture of Experts Method for Battery Electric Vehicles
385
M
1
Data
D
1
M
n
D
n
M(x)
1
Combina�on
M(x)
n
y
(a) Bagging
M
1
Data
M
2
M(x)
1
Combine
M(x)
2
D
1
D
2
D
n
M
n
M(x)
n
y
(b) Boosting
M
1
Data
M
n
M(x)
1
Meta Model
M(x)
n
y
(c) Stacking
M
1
Data
M
n
M(x)
1
Combine
M(x)
n
Gate
X
X
G(x)
1
G(x)
n
y
(d) Mixture of experts
Figure 1: Graphical illustration of the four common ensemble learning methods.
outputs M
1
(X), . . . , M
n
(X) a greater influence for the
final output y(x). The following equation shows the
basic formula for AdaBoost:
y(x) = sign
n
∑
i=1
w
i
M
i
(x)
!
(3)
Stacking
Stacking (or stacked generalization) relies on a meta
model, which tries to improve the final output y(x) by
inducing which base models M
1
(X), . . . , M
n
(X) pro-
duce an accurate output (Smyth and Wolpert, 1997).
In contrast to bagging and boosting, the stacking
method often uses different learning algorithms such
as decision trees and neural networks within the en-
semble, thus following a heterogeneous approach for
the ensemble. Similar to cross-validation, the whole
data is split in k subsets, one for validation and the
remaining k − 1 for training. Each base model is then
trained on a different set of k − 1 subsets and after-
wards validated on the unseen k
th
subsets. The output
of each base model is then used as the training data
for a meta model, which learns on how to combine the
outputs of each base model (see Figure 1c). Thus, re-
sulting in learning weights w
1
, . . . , w
n
for the outputs
of each base model. After finished training for the
meta model all the previously trained base models are
discarded to retrain on the combined entire training
data (Rincy and Gupta, 2020). The following equa-
tion demonstrates the combination rule for the meta
model output y(x):
y(x) =
n
∑
i=1
w
i
M
i
(x) (4)
Mixture of Experts
Mixture of experts relies on the idea of divide-and-
conquer as the problem space is “divided” and then
“conquered” by combining experts for the output (see
Figure 1d) (Sagi and Rokach, 2018). It trains models
M
1
, . . . , M
n
on separated subsets of the training data,
which are derived by separating different regions of
the feature space (Jacobs et al., 1991). Hence, each
model becomes an expert on its individual feature
space. However, there is no general rule on how to
create the subsets, and they are even allowed to over-
lap. After each model becomes an expert for its sub-
space of the problem, it is responsible for its special-
ized subset. An additional learning model is then used
as a “gate” to learn and apply a weighted combination
rule for the outputs of each expert M
1
(X), . . . , M
n
(X).
Thus, the weights w
1
, . . . , w
n
are determined by the
gate and the final output y(x) is aggregated by the fol-
lowing equation:
y =
C
∑
i=1
w
i
(x)M
i
(x) (5)
3 METHODOLOGY
Our proposed methodology for the application of en-
semble learning for energy estimation is based on the
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
386

mixture of experts method. Thus, experts are com-
bined to improve the estimation of energy usage for
a given trip. These experts apply a machine learn-
ing technique on real-world driving-data which is en-
riched by external data sources such as data from
navigation providers (e.g. Google or HERE) (Pe-
tersen et al., 2019). The input data for the experts
is aggregated by GPS information, based on links
from the navigation provider. This is reasonable due
to common eco-routing systems which rely on road
segments or links for their routing algorithms (Ku-
cukoglu et al., 2021). In this study, data from the nav-
igation provider HERE is used, which distinguishes
5 different road types. For each road type, an expert
model is trained by selecting corresponding link-wise
data. Thus, due to the nature of this methodology,
we call this approach Mixture of Road Energy Ex-
perts (MORE). An illustration of MORE is given in
Figure 2.
Selector
RE
1
Combina�on
Data
RE
4
RE
2
RE
3
RE
5
1
y
1 2 3 4 5
Figure 2: Graphical illustration of the postulated methodol-
ogy MORE. Consisting of 5 road experts (RE) and a road-
based selector for combining the estimations.
It is important to note, that in contrast to the stan-
dard mixture of experts method, we don’t incorporate
weights for each expert. Since the approach is a link-
wise estimation method, based on routing informa-
tion, the composition of the trip is known. Thus, it is
known to the algorithm when to apply which road ex-
pert RE
1
, . . . , RE
5
for a link to benefit from its exper-
tise. In the remaining part of this section, we will give
a description of the available data, presenting the se-
lected features as well as the energy estimation model.
3.1 Description of Real-world Driving
Data
Data-driven approaches such as MORE learn the re-
lationship between different real-world driving sig-
nals such as velocity and the energy consumption. In
this study, data from 152 real-world test drives of a
Porsche Taycan were used. The test drives were con-
ducted under real-world conditions in Europe, mainly
in Germany, and consists of an accumulated length
of approximately 7500 km. All signals on the Con-
troller Area Network (CAN) were sampled at 10 Hz.
As mentioned in the beginning of this section, the ex-
isting CAN data was enriched by traffic and road data
from the navigation provider HERE and segmented
based on the link information. Yielding roughly
40000 road segments as the data input for the mod-
els used in MORE.
3.2 Machine Learning-based Energy
Consumption Model
The proposed methodology consists of five expert
models for the estimation of the energy consumption
on different road types. Research has shown that Mul-
tilayer Perceptron (MLP) architectures achieve high
accuracy when used in ensembles for time series es-
timation (Mahalakshmi et al., 2016), thus it was cho-
sen as an initial expert model type. Even tough newer
and more complex models for time series estimation
exist, MLPs yield sufficient estimation accuracy and
can be used in a variety of different circumstances.
Thus, MLPs can be used as a baseline to investigate
the MORE approach. For the input of the MLPs var-
ious statistical features (e.g. mean and standard de-
viation) were calculated on the recorded signals for
each road segment. By applying a correlation-based
feature selection, 6 relevant features were deduced to
have a high impact on the energy consumption. Ta-
ble 1 gives an overview of the selected features as the
input for the expert models of MORE.
Table 1: Input data for the expert models.
Feature Description
v
mean
Mean speed of the ego vehicle
m
neg
% of negative slope
v
base
Base speed of road participants
l Length of the road segment
RT Road type of the current road segment
T
out
Outside temperature
4 EXPERIMENT AND
DISCUSSION
In this study, we evaluate the performance of MORE
and its individual road experts RE
1
, . . . , RE
5
against
the performance of a general monolithic model G
which is trained on all the training data. The orig-
inal data is split into training and testing by apply-
ing an 80/20 split. For verifying the robustness of
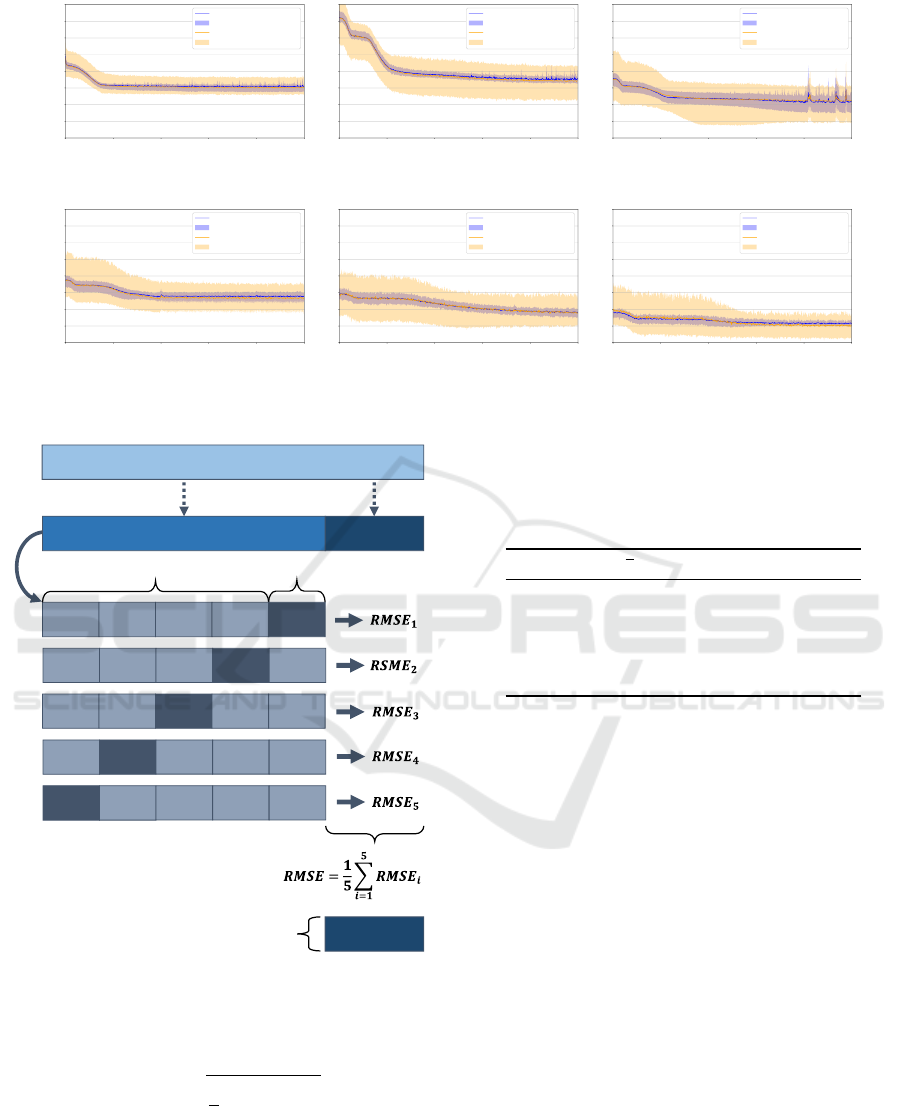
the models, we conducted a 5-fold cross-validation
experiment on the training data. Figure 4 illustrated
the 5-fold cross-validation procedure. For evaluation
A Data-driven Energy Estimation based on the Mixture of Experts Method for Battery Electric Vehicles
387
0 100 200 300 400 500
Epoch
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
RMSE Loss in kWh
Mean Training Loss
5-Fold Training Loss Spread
Mean Validation Loss
5-Fold Validation Loss Spread
(a) Model G
0 100 200 300 400 500
Epoch
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
RMSE Loss in kWh
Mean Training Loss
5-Fold Training Loss Spread
Mean Validation Loss
5-Fold Validation Loss Spread
(b) Model RE
1
0 100 200 300 400 500
Epoch
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
RMSE Loss in kWh
Mean Training Loss
5-Fold Training Loss Spread
Mean Validation Loss
5-Fold Validation Loss Spread
(c) Model RE
2
0 100 200 300 400 500
Epoch
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
RMSE Loss in kWh
Mean Training Loss
5-Fold Training Loss Spread
Mean Validation Loss
5-Fold Validation Loss Spread
(d) Model RE
3
0 100 200 300 400 500
Epoch
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
RMSE Loss in kWh
Mean Training Loss
5-Fold Training Loss Spread
Mean Validation Loss
5-Fold Validation Loss Spread
(e) Model RE
4
0 100 200 300 400 500
Epoch
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.10
RMSE Loss in kWh
Mean Training Loss
5-Fold Training Loss Spread
Mean Validation Loss
5-Fold Validation Loss Spread
(f) Model RE
5
Figure 3: Training and validation loss for applied 5-fold cross-validation.
Training Data
It .1
Training Folds
Valida�on Fold
It .2
It .3
It .4
It .5
Test Data
Original Data
Overall Model
Mean Performance
80 %
20 %
Test Data
Final Evalua�on
Figure 4: 5-Fold cross-validation for the training and test
data.
of each model, we used the root mean squared error
(RMSE) (see equation 6).
RMSE =
s
1
n
n
∑
i=1
(y
i
− ˆy
i
)
2
(6)
Each model was trained for 500 epochs on its dedi-
cated data. Thus, road experts RE
n
were trained and
validated on the subset of road type n. As a result,
model G had the most data for the training and valida-
tion process compared to the individual road experts.
Table 2 give an overview of the composition of the
data in regard to the road types.
Table 2: Proportions of road types on the total distance.
Road Type v in data Percentage of data
1 90 kmh
−1
41 %
2 60 kmh
−1
35 %
3 57 kmh
−1
17 %
4 45 kmh
−1
4 %
5 28 kmh
−1
3 %
HERE defines the road types as ”used to classify
roads depending on the speed, importance and con-
nectivity of the road” (HERE, 2022). A lower number
indicates a higher priority, thus higher speed and im-
portance of that road type. Figure 3 shows the mean
training and validation loss, as well as the loss spread
across the folds for each model. It can be seen that
during the process, no model underfitted or overfit-
ted. However, the spread of the validation loss is
much higher for the road expert models RE
1
, . . . , RE
5
compared to the general monolithic model G. This
is due to the decreased data for the cross-validation
approach for the road expert models. Table 3 sum-
marizes the best mean validation loss of the cross-
validation approach.
The results indicate that besides RE
1
each road expert
yield a smaller RMSE for its individual road type. For
a final evaluation of the combined road experts as our
proposed MORE we compare it to the general mono-
lithic model G on the test data which was not used
for the cross-validation. Table 4 compares the two
models on the whole test data, as well as a detailed
comparison of each road type within the test data.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
388

Table 3: Cross-validation results of each model.
Model RMSE [kWh]
G 0.052
RE
1
0.056
RE
2
0.045
RE
3
0.048
RE
4
0.041
RE
5
0.034
Table 4: Comparison of general monolithic model G and
MORE on test data.
Data RMSE
G
[kWh] RMSE
MORE
[kWh]
All test data 0.053 0.049
Road type 1 0.048 0.045
Road type 2 0.048 0.044
Road type 3 0.051 0.047
Road type 4 0.055 0.052
Road type 5 0.052 0.051
It can be seen that MORE has an overall better
performance on each road type. Each individual road
expert RE
n
of MORE has an better estimation perfor-
mance on its dedicated part of the test data compared
to the general monolithic model G. In total, MORE
has an 7.5% improvement over the performance of
model G for the whole test data. It illustrates the po-
tential on how ensemble learning can improve the en-
ergy estimation for BEVs.
5 CONCLUSION
This paper presents a data-driven approach for the en-
ergy estimation of BEVs based on ensemble learning,
utilizing the mixture of experts method to specialize
models on specific road types. It is found that, the
proposed method MORE with 5 specialized road ex-
perts improves the RMSE of the energy estimation by
roughly 7.5% compared to the estimation of a mono-
lithic model. The results show that, energy estima-
tion benefits from utilizing an ensemble neural net-
work approach. However, testing this concept in live
operation on a BEV may yield additional insights on
the applied advantages of MORE.
The research shown in this paper could be ex-
tended in the future in different aspects. Different spe-
cializations for the mixture of experts method should
be investigated, e.g. for different driver styles. Fur-
ther work could incorporate advanced methods for a
robust and reliable classification of different driver-
styles, which will be used for the experts. A fur-
ther study could assess the impact of individual fea-
tures for each specialized neural network due to their
importance for the energy estimation, e.g. on dif-
ferent road types or for different driver-styles. Si-
multaneously investigating different combinations of
neuronal network architectures (e.g. RNN, CNN or
Transformer) might also optimize the overall accu-
racy and data efficiency of utilizing heterogeneous
models to benefit from their individual traits.
REFERENCES
Arif, S. M., Lie, T. T., Seet, B. C., Ayyadi, S., and Jensen,
K. (2021). Review of Electric Vehicle Technologies,
Charging Methods, Standards and Optimization Tech-
niques. Electronics, 10(16):1910.
Breiman, L. (1996). Stacked regressions. Machine Learn-
ing, 24(1):49–64.
Chung, Y. W., Khaki, B., Li, T., Chu, C., and Gadh, R.
(2019). Ensemble machine learning-based algorithm
for electric vehicle user behavior prediction. Applied
Energy, 254(April):113732.
Eisel, M., Nastjuk, I., and Kolbe, L. M. (2016). Understand-
ing the influence of in-vehicle information systems on
range stress – Insights from an electric vehicle field
experiment. Transportation Research Part F: Traffic
Psychology and Behaviour, 43:199–211.
Freund, Y. and Schapire, R. E. (1999). A Short Introduction
to Boosting. In Proceedings of the 16th International
Joint Conference on Artificial Intelligence - Volume 2.
HERE (2022). FunctionalClassType. https:
//developer.here.com/documentation/routing/
dev guide/topics/resource-type-functional-class.html
[Online; Accessed: 2022-01-22].
Hua, X., Thomas, A., and Shultis, K. (2021). Re-
cent progress in battery electric vehicle noise,
vibration, and harshness. Science Progress,
104(1):003685042110052.
Jacobs, R. A., Jordan, M. I., Nowlan, S. J., and Hinton, G. E.
(1991). Adaptive Mixtures of Local Experts. Neural
Computation, 3(1):79–87.
Kruppok, K., Kriesten, R., and Sax, E. (2018). Calcu-
lation of route-dependent energysaving potentials to
optimize EV’s range. In Bargende, M., Reuss, H.-
C., and Wiedemann, J., editors, 18. Internationales
Stuttgarter Symposium, pages 1349–1363. Springer
Fachmedien Wiesbaden, Wiesbaden.
Kucukoglu, I., Dewil, R., and Cattrysse, D. (2021). The
electric vehicle routing problem and its variations: A
literature review. Computers & Industrial Engineer-
ing, 161:107650.
Mahalakshmi, G., Sridevi, S., and Rajaram, S. (2016). A
survey on forecasting of time series data. In 2016
International Conference on Computing Technologies
and Intelligent Data Engineering, ICCTIDE 2016. In-
stitute of Electrical and Electronics Engineers Inc.
Mahmoudzadeh Andwari, A., Pesiridis, A., Rajoo, S.,
Martinez-Botas, R., and Esfahanian, V. (2017). A re-
view of Battery Electric Vehicle technology and readi-
ness levels. Renewable and Sustainable Energy Re-
views, 78(May):414–430.
A Data-driven Energy Estimation based on the Mixture of Experts Method for Battery Electric Vehicles
389

Noel, L., Zarazua de Rubens, G., Sovacool, B. K., and
Kester, J. (2019). Fear and loathing of electric vehi-
cles: The reactionary rhetoric of range anxiety. Energy
Research & Social Science, 48:96–107.
Petersen, P., Thorgeirsson, A. T., Scheubner, S., Otten, S.,
Gauterin, F., and Sax, E. (2019). Training and vali-
dation methodology for range estimation algorithms.
In Proceedings of the 5th International Conference
on Vehicle Technology and Intelligent Transport Sys-
tems, VEHITS 2019, Heraklion, Crete, Greece, May
3-5, 2019, pages 434–443. SciTePress.
Rincy, T. N. and Gupta, R. (2020). Ensemble Learn-
ing Techniques and its Efficiency in Machine Learn-
ing: A Survey. In 2nd International Conference on
Data, Engineering and Applications (IDEA), pages 1–
6, Bhopal, India. IEEE.
Rudolf, T., Schurmann, T., Schwab, S., and Hohmann,
S. (2021). Toward Holistic Energy Management
Strategies for Fuel Cell Hybrid Electric Vehicles in
Heavy-Duty Applications. Proceedings of the IEEE,
109(6):1094–1114.
Sagi, O. and Rokach, L. (2018). Ensemble learning: A sur-
vey. WIREs Data Mining and Knowledge Discovery,
8(4).
Sanguesa, J. A., Torres-Sanz, V., Garrido, P., Martinez, F. J.,
and Marquez-Barja, J. M. (2021). A Review on Elec-
tric Vehicles: Technologies and Challenges. Smart
Cities, 4(1):372–404.
Schapire, R. E. (1990). The strength of weak learnability.
Mach. Learn., 5(2).
Smyth, P. and Wolpert, D. (1997). Stacked Density Esti-
mation. In Advances in Neural Information Process-
ing Systems 10, [NIPS Conference, Denver, Colorado,
USA, 1997], pages 668–674. The MIT Press.
Thorgeirsson, A. T., Scheubner, S., Funfgeld, S., and Gau-
terin, F. (2020). An Investigation Into Key Influence
Factors for the Everyday Usability of Electric Vehi-
cles. IEEE Open Journal of Vehicular Technology,
1(Xx):348–361.
Ullah, I., Liu, K., Yamamoto, T., Zahid, M., and Jamal, A.
(2021). Electric vehicle energy consumption predic-
tion using stacked generalization: An ensemble learn-
ing approach. International Journal of Green Energy,
18(9):896–909.
Yuan, Q., Hao, W., Su, H., Bing, G., Gui, X., and Safikhani,
A. (2018). Investigation on Range Anxiety and Safety
Buffer of Battery Electric Vehicle Drivers. Journal of
Advanced Transportation, page 12.
Zhang, C. and Ma, Y. (2012). Ensemble Machine Learning.
Springer US, Boston, MA.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
390
