
How Can Autonomous Road Vehicles Coexist with Human-Driven
Vehicles? An Evolutionary-Game-Theoretic Perspective
Isam Bitar
a
, David Watling
b
and Richard Romano
c
Institute for Transport Studies, University of Leeds, 34-40 University Rd, Leeds, LS2 9JT, U.K.
Keywords: Autonomous Vehicles, Game Theory, Evolution, Evolutionarily Stable Strategies, Fitness.
Abstract: The advent of highly automated vehicles in the form of autonomous road vehicles (ARVs) is bound to bring
about a paradigm shift in road user interaction, especially that between ARVs and human-driven vehicles
(HDVs). Previous literature on the game-theoretic interaction between ARVs and HDVs tends to focus on
working out the best possible strategy for a single interaction, i.e. the Nash equilibrium. This position paper
sets out to demonstrate the importance and potential impact of applying evolutionary game theoretic principles
to what is effectively a dynamic population driven by evolutionary forces – the population of road users. We
demonstrate using theoretical scenarios that simply maintaining Nash equilibria does not guarantee
evolutionary success. Instead, ARVs must enjoy a demonstrable advantage over other road users when few
in numbers. Otherwise, their uptake will slow down and eventually reverse. We argue that the same selection
factors which influence the success of living populations in the natural world also influence the success of the
different vehicle types and driving styles in the road user population, including ARVs. We demonstrate this
by assigning an expected fitness score to each vehicle in a one-to-one interaction, such as at a junction. This
fitness score is dependent on driver, rider and economic costs incurred by the vehicle and/or its occupant(s)
during interaction. In turn we show that ARV and transport system designers need to ensure that the fitness
score of their systems create evolutionary stability.
1 INTRODUCTION
Road transport is a highly interactive activity in
which road users must compete for space and priority.
This is done through a vast array of competitive,
cooperative, and communicative behaviours in which
road users engage to facilitate their distribution in
space and time. These behaviours are defined as road
user interactions (Markkula et al., 2020). As
autonomous road vehicles (ARV) reach market
maturity and begin using the road network, their
interaction with human-driven vehicles (HDV) will
strongly influence the success of ARVs in the short
and long term. In this position paper, we argue that
this extends beyond the one-on-one interaction
between ARVs and HDVs to include the population-
level interaction between the two distinct groups of
road users, each with their own inherent properties.
a
https://orcid.org/0000-0002-5130-0148
b
https://orcid.org/0000-0002-6193-9121
c
https://orcid.org/0000-0002-2132-4077
There are fundamental differences between
ARVs and HDVs that set them apart as distinct road
user populations. These differences include
differences in the decision-making mechanism
(Elvik, 2014; Fox et al., 2018; Harris, 2017; Kang &
Rakha, 2020; Meng, Su, Liu, & Chen, 2016),
attention span, driving behaviour (Millard-Ball,
2018; van Loon & Martens, 2015) and over-all
communication and interaction capabilities (C. Liu,
Lin, Shiraishi, & Tomizuka, 2018). Many researchers
believe that HDVs and human road users in general
are likely to learn the nuances of ARV behaviour and
subsequently take advantage of them to force ARVs
to yield at every interaction (Cooper et al., 2019; Fox
et al., 2018; Millard-Ball, 2018). Indeed, experiments
on humans and AI have demonstrated that whilst
humans expect cooperative behaviour from
machines, they are rarely willing to reciprocate
(Karpus, Krüger, Verba, Bahrami, & Deroy, 2021). If
376
Bitar, I., Watling, D. and Romano, R.
How Can Autonomous Road Vehicles Coexist with Human-Driven Vehicles? An Evolutionary-Game-Theoretic Perspective.
DOI: 10.5220/0011079500003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 376-383
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ARVs are pushed to yield at most interactions, they
will be unable to make significant progress on the
road network (Cooper et al., 2019; Fox et al., 2018;
Millard-Ball, 2018). This would in turn cause
significant traffic safety and efficiency issues and
damage the uptake of ARVs.
Various solutions have been proposed in the
literature, including building larger, more imposing
ARVs or mounting loud sirens or water pistols to
“punish” transgressors (Fox et al., 2018). Going
further, some suggested programming ARVs with a
non-zero probability to cause collision as a form of
credible threat to dissuade would-be exploiters
(Camara, Dickinson, Merat, & Fox, 2019). Others
have programmed a Stackelberg game in which the
bullied virtual ARV actively punishes the human
player if they behaved antisocially in previous
interactions (Cooper et al., 2019). Setting aside their
ethical and practical ramifications, such measures
merely offer reactionary solutions to a fundamental
problem and are unlikely to work in the long term.
Instead, one must look to other environments in
which we can observe competition and cooperation
between fundamentally different populations. One
such environment is the natural world. There,
members of different animal species (and within the
same species) interact, compete, and cooperate with
each other to share limited resources. Such resources
include food, shelter, and mates. These are resources
each individual needs to maximise its own fitness and
ensure survival and reproduction. Yet, despite the
prevalent scarcity of these resources in most natural
settings, cooperative behaviour is widely spread in
animal populations and fatal conflicts are rare outside
of predation (J. Maynard Smith & Price, 1973;
Wilkinson, 1984).
Animal cooperation in nature can evolve and
persist through means of natural selection (Hamilton,
1964). Evolutionary game theory provides the ideal
theoretical framework for understanding the
dynamics that lead to the evolution of cooperation
(Bendor & Swistak, 1995; John Maynard Smith,
1982). Once evolved, cooperation persists through
means of evolutionary stability. Evolutionary
stability is a state in which most or all members of a
population of individuals interact in a way where a
new, small group of mutant individuals cannot invade
and dominate the population (John Maynard Smith,
1982). A set of behaviours that fits this description is
known as an evolutionarily stable strategy (ESS).
ESSs have been used to describe emergent
cooperative and competitive behaviours in animal
populations (Sirot, 2000; Wilkinson, 1984). The
classic Hawk-Dove game provides a conceptual
illustration of the evolution of cooperation (J.
Maynard Smith & Price, 1973). Many animal
behaviours in nature have been shown to conform to
the categorical paradigm of Hawk-Dove games.
Examples include nesting habits of digger wasps
(Brockmann, Grafen, & Dawkins, 1979), food
sharing in vampire bats (Wilkinson, 1984) and
territorial conflicts in funnel web spiders
(Hammerstein & Riechert, 1988).
Beyond the natural world, several studies exist on
the applicability of ESSs in other disciplines. One
such example is the work of Altman, El-Azouzi,
Hayel, and Tembine (2009) who use a variant of the
Hawk-Dove game to predict the success and
evolutionary stability of different Internet transport
protocols (TCPs) and provide guidelines for the
introduction and upgrade of evolutionarily-stable
TCPs. Other such studies exist in the fields of
economics (Friedman, 1991; Kandori, 1996), policy
making (da Silva Rocha & Salomão, 2019; Xu,
Wang, Wang, & Ding, 2019) and stakeholder conflict
(L. Liu, Zhu, & Guo, 2020; Yu, Zhao, Huang, &
Yang, 2020).
Several studies have also been conducted in the
field of transport. Some applications include route
and mode choice modelling (Lei & Gao, 2019; Wu,
Pei, & Gao, 2015). Others have used evolutionary
game theory as a predictor and facilitator of effective
implementation of government subsidies and
compliance monitoring in transport. Examples
include new-energy vehicles (Wang, Fan, Zhao, &
Wu, 2015) and public transport (Zhang, Long, Huang,
Li, & Wei, 2020). Some road user interaction models
have also made use of evolutionary game theory to
predict driver attention, simulate driver cooperation
and address social dilemmas (Chatterjee & Davis,
2013; Iwamura & Tanimoto, 2018). One exploratory
study has investigated the aggressiveness of driving
behaviour from a Hawk-Dove standpoint (Free,
2018). To the authors’ knowledge, however, this
concept is yet to be expanded to draw larger-scale
conclusions on the evolutionary stability of road user
populations. More specifically, evolutionary game
theory has not yet been used as a framework for
ARVs’ interaction with HDVs.
2 CONCEPTUAL
DEMONSTRATION
There are parallels to be drawn between the
competition for resources in nature and the interaction
between vehicles on the road network. Whilst animals
How Can Autonomous Road Vehicles Coexist with Human-Driven Vehicles? An Evolutionary-Game-Theoretic Perspective
377

in nature compete for food, territory and mates,
vehicles (both human-driven and autonomous)
compete for road space and priority on the road
network. In both worlds, competitors can either
cooperate to share the contested resource or expend
energy fighting for it. Only the “fittest” individuals
will succeed in reproduction and proliferation. This
fitness can be loosely defined by the individual’s
success in securing a viable amount of the contested
resources without compromising one’s viability.
Thus, the use of the concept of fitness ensures that
strategies adopted do not endanger the safety of the
agent (and by extension, its opponent). This is crucial
for ARVs since one of the main motivations for their
development is the elimination of human-related
safety risks. In terms of reproduction, animals
reproduce genetically via procreation, whereas
vehicles and driving styles “reproduce” memetically
(Dawkins, 2016) through increased sales and
imitation, respectively. This parallel is possible
because as far as behaviour is concerned, an ARV is
a living organism, whose goal is to “reproduce”
through selling more models (copies) of itself, which
it can achieve by being successful in the road space
and enticing potential customers to buy in.
Game-theoretic ARV models in the literature are
often validated against opponents playing by the same
rules (Kang & Rakha, 2020; Meng et al., 2016) In
reality, such results are only valid against a static,
homogenous population. The road user population,
however, is dynamic, varied and constantly evolving.
More importantly, road users have the capacity to
adjust their behaviour based on the characteristics of
their opponents. This is known as a conditional
strategy in game theory (Gross & Repka, 1998). We
envisage that, unlike model simulations in the
literature, HDVs will react to the introduction of
ARVs by adjusting their behaviour to maximise their
benefit. Primarily, HDVs will look to exploit ARVs’
propensity to be risk averse and their ability to
maintain permanent rationality and attention. Unless
ARVs can adapt in turn, they risk developing
strategies that are evolutionarily unstable and thus fail
in penetrating the population of road users.
2.1 Theoretical Formulation
As ARVs mature and make their way to the market,
they will begin their entry into the road user
population gradually. These ARVs will likely operate
within a connected environment in which ARV-ARV
interactions are concluded more efficiently and
effectively (Hancock, Nourbakhsh, & Stewart, 2019;
Wadud, MacKenzie, & Leiby, 2016).
As with the traditional Hawk-Dove game,
vehicles interact to share road space. Interaction costs
energy. Conceptually, there are three elements to an
interaction cost function: the economic costs (fuel
consumption, tyre wear, etc.), the driver costs
(increased demand on attention, planning, decision-
making, etc.) and the rider costs (safety, delay, ride
comfort, etc.). All costs traditionally apply to an
HDV. In contrast, ARVs arguably bear no driver
costs since ARV controllers are expected to be ever-
attentive and ever-processing. Thus, it makes no
difference to an ARV whether an interaction is
required and to what level of sophistication.
There are two key concepts to understand in how
vehicle interactions are represented in this paper.
Vehicles can either choose to facilitate an interaction
(Dove-like behaviour) or escalate in a bid to win
priority (Hawk-like behaviour). Facilitation can be
thought of as cooperation between the two vehicles to
conclude the interaction with the maximum (Pareto
efficient) payoff for both vehicles. Escalation, on the
other hand, constitutes competitive behaviour whose
aim is to maximise individual payoff at the expense
of the other vehicle. Therefore, if both vehicles
choose to facilitate, they interact to share priority
equitably, i.e., it goes to the vehicle which, by
convention, has right of way. We assume that, on
average, a vehicle would have right of way half of the
time. This is conceptualised as an interaction reward
𝑅0.5. If one vehicle escalates and the other
facilitates, the escalating vehicle forcibly takes
priority ( 𝑅1). If both escalate, both vehicles
attempt to forcibly win priority, expending
considerable energy in the process, but will determine
priority by convention in the end ( 𝑅0.5).
Facilitation incurs the least interaction cost ( 𝐶 ),
typically thought of as the mere cost of engaging in
an interaction with another vehicle. Escalation incurs
greater cost as that would likely involve aggressive
manoeuvring or excessive acceleration. Mutual
escalation incurs the greatest cost as both vehicles are
assumed to maintain their escalation for longer.
Table 1 below demonstrates the concepts discussed.
Table 1: Normal-form the road user interaction game.
Veh 2
Veh 1
Facilitate
(F)
Escalate
(E)
Facilitate
(
F
)
0.5 - 𝐶
, 0.5 - 𝐶
0 - 𝐶
, 1 - 𝐶
Escalate
(E)
1 - 𝐶
, 0 - 𝐶
0.5 - 𝐶
, 0.5 - 𝐶
𝐶
𝐶
𝐶
𝐶
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
378

John Maynard Smith (1982) established two
conditions that a strategy must meet in order to be
evolutionarily stable. For a resident strategy, this
means the ability to resist invasion by new strategies.
For a new strategy, this means the ability to invade a
population of resident strategies.
The subject strategy must do better against
itself than any other strategy could
If a strategy exists which could do equally well
against the subject strategy, the subject strategy
must do better against the other strategy than
the other strategy could against itself
This can be mathematically expressed as follows
𝐸
𝑆
,𝑆
𝐸𝑆
,𝑆
OR
(1)
𝐸
𝑆
,𝑆
𝐸𝑆
,𝑆
AND
𝐸𝑆
,𝑆
𝐸𝑆
,𝑆
(2)
where
𝑆
,𝑆
are the subject strategy and the set of all
other strategies, respectively
𝐸𝑆
,𝑆
is the total expected payoff for 𝑆
against 𝑆
These broad conditions can be adapted and
applied to the situation where ARVs are introduced to
the market. The current resident population in the
road network is that of HDVs. As of 2022, they
comprise well over 99% of all vehicular road traffic.
Therefore, any new fleet of ARVs which wish to
establish a meaningful foothold in the road user
network must satisfy one of the below two conditions
𝐸
𝑆
,𝑆
𝐸
𝑆
,𝑆
OR
(3)
𝐸
𝑆
,𝑆
𝐸
𝑆
,𝑆
AND
𝐸
𝑆
,𝑆
𝐸𝑆
,𝑆
(4)
where
𝑆
,𝑆
are the interaction strategy sets
available to ARVs and HDVs, respectively
𝐸𝑆
,𝑆
is the total expected payoff for each
strategy in Strategy Set 𝑥 against each strategy in
Strategy Set 𝑦 and can be calculated as follows
𝐸𝑆
,𝑆
𝑢
𝑖
𝜎𝑖
(5)
where
𝑖 ∈ 1,2,3,… ,𝑛 is an outcome of the normal-
form game between Strategy Sets 𝑆
and 𝑆
𝑢𝑖 is the utility (payoff) of Outcome 𝑖, which is
calculated as 𝑅𝐶
𝜎𝑖 is the probability of Outcome 𝑖
Looking back at Table 1, 𝑖 in this scenario can be
one of four outcomes: 𝑖 ∈ 𝐹𝐹,𝐹𝐸,𝐸𝐹,𝐸𝐸. As
such, the total expected payoff for ARVs can be
thought of as the weighted sum of the ARV payoff of
each of these four outcomes weighted against each
outcome’s probability. This probability will depend
on the strategy employed by both ARVs and HDVs.
Substituting Equation 5 into the inequalities in 3
and 4 yields the following inequalities
𝑅
𝐶
𝜎
𝑖
𝑅
𝐶
𝜎𝑗
(6
)
where
𝑖 ∈ 𝐹𝐹,𝐹𝐸,𝐸𝐹,𝐸𝐸 is an outcome of the game
between Strategy Sets 𝑆
and 𝑆
𝑗 ∈ 𝐹𝐹,𝐹𝐸,𝐸𝐹,𝐸𝐸 is an outcome of the game
between Strategy Sets 𝑆
and 𝑆
𝑅
𝐶
𝜎
𝑖
𝑅
𝐶
𝜎𝑗
AND
𝑅
𝐶
𝜎
𝑘
𝑅
𝐶
𝜎𝑙
(7
)
where
𝑘 ∈ 𝐹𝐹,𝐹𝐸,𝐸𝐹,𝐸𝐸 is an outcome of the game
between Strategy Sets 𝑆
and 𝑆
𝑙 ∈ 𝐹𝐹,𝐹𝐸,𝐸𝐹,𝐸𝐸 is an outcome of the game
between Strategy Sets 𝑆
and 𝑆
Fulfilling the inequalities in 6 and 7 require the
optimisation of three variables
Maximisation of 𝑅
/𝑅
Minimisation of 𝐶
/𝐶
Maximisation of 𝜎
𝑖
/𝜎
𝑘
where 𝑅
𝐶
/
𝑅
𝐶
is at a maximum
The solution(s) to this optimisation problem will
vary greatly in the real world based on ARV
application, the driving culture of the local existing
road user population, traffic rules and regulations, and
other considerations. However, the approaches
available to implement such solutions can generally
be grouped into three categories.
External measures to provide greater incentive
for customers to adopt ARVs
Capitalisation on inherent ARV behavioural,
computational, and sensory strengths
Creation of a cooperative ARV subcommunity
where ARVs work together to maximise the
subcommunity’s over-all fitness
In the following section, we provide an example
of how some of these categorical solutions can be
used to optimise the problem.
How Can Autonomous Road Vehicles Coexist with Human-Driven Vehicles? An Evolutionary-Game-Theoretic Perspective
379
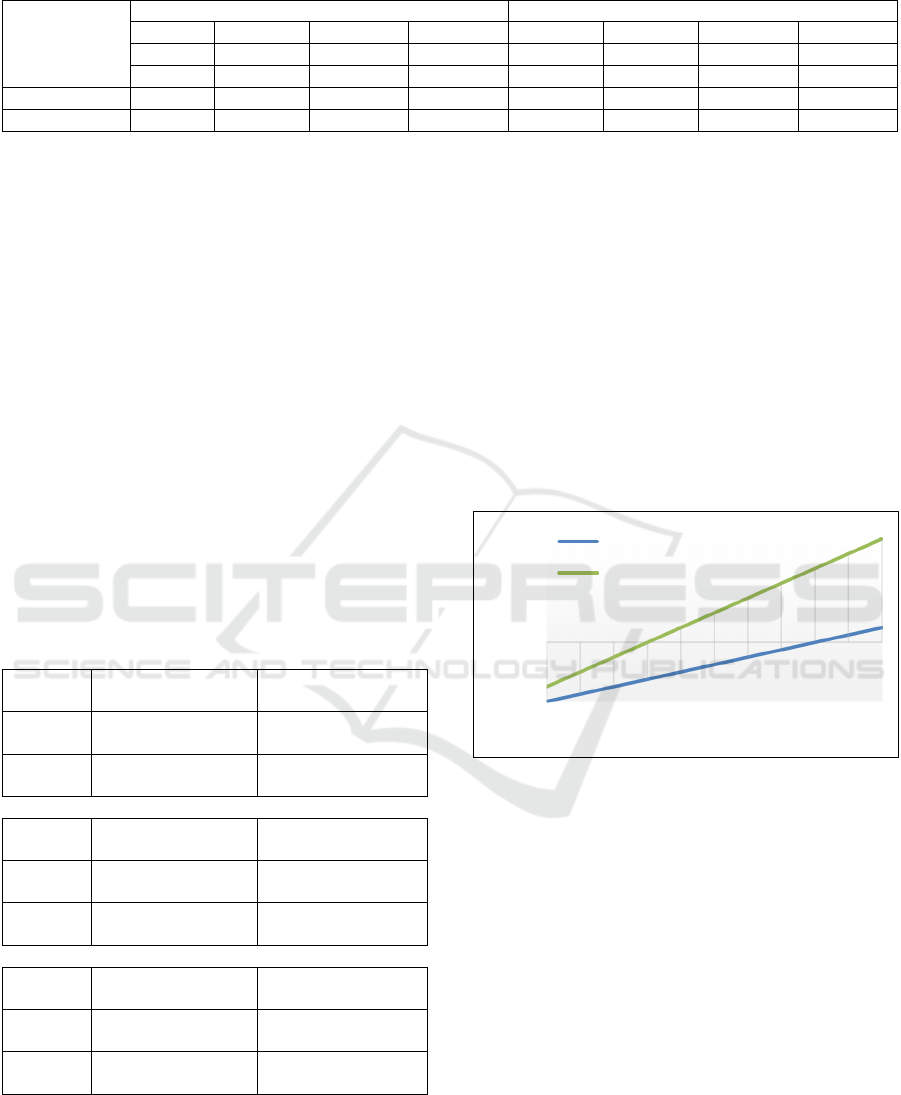
Table 2: Reward and cost parameters for road user interaction demonstration.
ARV HDV
𝐶
𝐶
𝐶
𝐶
𝐶
𝐶
𝐶
𝐶
0.2 0.2 0.55 0.85 0.3 0.3 0.65 1.05
𝑅
𝑅
𝑅
𝑅
𝑅
𝑅
𝑅
𝑅
vs ARV 0.5 0 1 0.5 0.5 0 1 0.8
vs HDV 0.5 0 1 0.2 0.5 0 1 0.5
2.2 Demonstrative Example
We continue with the set-up described in Section 2.1
with an initial introduction of a small population of
ARVs. Table 2 gives an overview of the chosen
parameters which correspond to the different costs
and rewards associated with vehicle interaction.
These values are simplified to illustrate the
concept of evolutionary stability. In the real world,
the parameters would be subject to a range of traffic,
policy, vehicle, and human factors which would
together make up the cost and reward functions.
The cost parameters outlined in Table 2 for ARVs
are lower than the cost parameters for HDVs. This is
to account for the fact that ARVs bear no driver costs
associated with the interaction. Hence, the over-all
cost for interacting with other vehicles is smaller.
Table 3: Normal-form of the ARV-ARV game (top), HDV-
HDV game (middle) and HDV-ARV game (bottom).
Fractions under actions denote each action’s probability
based on the game’s Nash equilibrium.
ARV 2
ARV 1
F
0.5
E
0.5
F
0.5
0.3, 0.3 -0.2, 0.45
E
0.5
0.45, -0.2 -0.35, -0.35
HDV 2
HDV 1
F
0.5
E
0.5
F
0.5
0.1, 0.1 -0.4, 0.35
E
0.5
0.35, -0.4 -0.65, -0.65
ARV
HDV
F
1
E
0
F
0
0.1, 0.3 -0.4, 0.45
E
1
0.35, -0.2 -0.35, -0.65
The reward parameter for mutual escalation for
HDVs ( 𝑅
has been increased from 0.5 (equal
distribution of priority) to 0.8 (80-20 distribution of
priority to HDVs’ benefit). The reason for this is that
this scenario echoes the research findings discussed
in the introduction with regards to HDVs taking
advantage of and pushing ARVs to yield at most
interactions. The result of this asymmetry creates a
game matrix in which HDVs’ best strategy against
ARVs is to escalate with 100% probability. In turn,
this pushes ARVs to adopt a 100% probability to
facilitate. This creates a unique Nash equilibrium in
HDV-ARV interactions of EF. Table 3 illustrates this
in normal form.
HDVs’ exploitation of ARVs puts ARVs at an
immediate disadvantage. This is clearly demonstrated
in Figure 1, which illustrates the average expected
payoff profile for each of the two populations across
all possible proportions of ARVs out of the entire
population.
Figure 1: Average expected payoff profile for ARVs and
HDVs under the conditions set out in Table 3.
Under the currently set circumstances, HDVs
enjoy a significant advantage over ARVs across the
board. At lower proportions, ARVs receive the least
possible expected payoff. This will result in ARVs
failing to enter the road user population. Using the
figures in Table 3, we can calculate the total expected
payoff for each strategy pair at 𝑝𝐴𝑅𝑉 0 as follows
𝐸
𝑆
,𝑆
= 0.05 𝐸
𝑆
,𝑆
= 0.35
𝐸
𝑆
,𝑆
= -0.2 𝐸
𝑆
,𝑆
= -0.15
Therefore
𝐸
𝑆
,𝑆
𝐸
𝑆
,𝑆
Which means that the current set of HDV
strategies is evolutionarily stable, thus ARVs will not
be able to invade the population.
To combat this, we introduce two measures
inspired by the three solution categories outlined in
‐0,2
‐0,1
0
0,1
0,2
0,3
0,4
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Averageexpectedpayoff
ProportionofARVs
ARVs
HDVs
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
380
Section 2.1. Namely, we allow ARVs to
communicate with each other via V2V channels. This
allows ARVs to adopt a 100% probability to facilitate
when interacting with one another, thus maximising
the payoff for both vehicles (Pareto efficient).
Second, we introduce a subsidy function which
offsets the economic costs of operating an ARV.
Subsidies can take many different forms and have
varying effects on both ARVs and HDVs in the target
population. Evolutionary game theory has already
been used to model the likely reaction of new-energy
car manufacturers to government subsidies and
penalties (Zhang et al., 2020). In this paper, we focus
on modelling the effect of a hypothetical subsidy on
the over-all fitness of ARVs in the population. The
subsidy is granted in a manner that is inversely
proportional to the proportion of ARVs in the
population so that maximum subsidy is given when
ARV population is at a minimum. Equation 8
illustrates how the subsidy is applied in this example.
𝐶
𝐶
1 𝑄 𝑝𝐴𝑅𝑉
(8)
where
𝐶
is the ARV’s economic cost of interaction
𝐶
is the ARV’s economic cost of interaction
after subsidy
𝑝𝐴𝑅𝑉 is the
proportion
of ARVs in the population
𝑄 is a constant which determines the magnitude
of the subsidy and its effect on the given cost. For
example, a 𝑄 equal to 𝐶
offsets the entire economic
cost of interaction at 𝑝𝐴𝑅𝑉 = 0
We choose a 𝑄 value of 0.75, which provides a
net economic benefit (incentive) to ARVs. The
subsidy is terminated once the ARV proportion
reaches one half (𝑝𝐴𝑅𝑉 0.5). The resultant change
in normal-form payoffs is shown in Table 4.
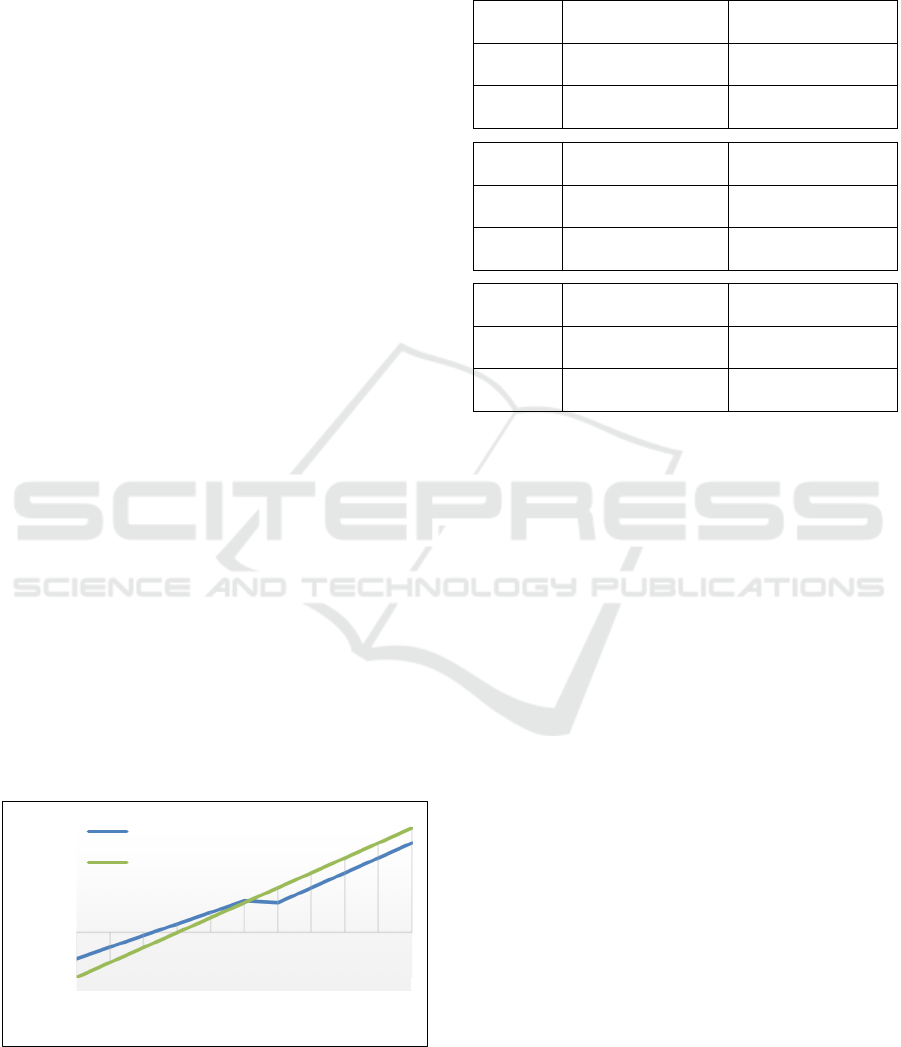
Figure 2 illustrates the average expected payoff
profile for each of the two populations following the
application of the two measures.
Figure 2: Average expected payoff profile for ARVs and
HDVs under the conditions set out in Table 4.
Table 4: Normal-form of the ARV-ARV game (top), HDV-
HDV game (middle) and HDV-ARV game (bottom) after
applying V2V communication and government subsidy.
Fractions under actions denote each action’s probability
based on the game’s Nash equilibrium.
ARV 2
ARV 1
F
1
E
0
F
1
0.413, 0.413 -0.09, 0.75
E
0
0.75, -0.09 0.1, 0.1
HDV 2
HDV 1
F
0.5
E
0.5
F
0.5
0.1, 0.1 -04., 0.35
E
0.5
0.35, -0.4 -0.65, -0.65
ARV
HDV
F
1
E
0
F
0
0.1, 0.413 -0.4, 0.75
E
1
0.35, -0.09 -0.35, -0.2
The application of V2V communication has the
positive effect of improving the average expected
payoff for ARVs as their numbers grow. This helps
close the gap between ARVs and HDVs in terms of
over-all fitness. Applying the subsidy has the added
benefit of offsetting some of the costs incurred by
ARVs. This in turn offsets the average expected
payoff for ARVs to levels above that of HDVs across
the population proportion to which a subsidy applies.
Using the figures in Table 4, we can calculate the
total expected payoff for each strategy pair at
𝑝𝐴𝑅𝑉 0 as follows
𝐸
𝑆
,𝑆
= 0.41 𝐸
𝑆
,𝑆
= 0.35
𝐸
𝑆
,𝑆
= -0.09 𝐸
𝑆
,𝑆
= -0.15
Therefore
𝐸
𝑆
,𝑆
𝐸
𝑆
,𝑆
Which means that the new set of ARV strategies
is evolutionarily stable, thus ARVs will be able to
invade the population and reach an evolutionarily
stable state at the population proportion at which the
average expected payoff of ARVs equals that of
HDVs. This can be graphically identified in Figure 2
as the point of intersection between the two curves, at
approximately 𝑝𝐴𝑅𝑉 0.5.
‐0,2
‐0,1
0
0,1
0,2
0,3
0,4
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Averageexpectedpayoff
ProportionofARVs
ARVs
HDVs
How Can Autonomous Road Vehicles Coexist with Human-Driven Vehicles? An Evolutionary-Game-Theoretic Perspective
381

3 CONCLUSIONS
The relationship between ARVs and HDVs is a
complex, dynamic, and evolving one. Evolutionary
game theory gives us a nature-based understanding of
a living, constantly evolving population: the
population of road users. Members of this population
interact with one another and compete for the finite
resources of space and priority. A vehicle or driving
style’s over-all performance in the daily task of
interactive driving dictates whether it continues to be
adopted or gets dropped in favour of an alternative.
This process of memetic reproduction is analogous to
genetic reproduction (Dawkins, 2016). Therefore,
without proper understanding of the evolutionary
dynamics of this population, ARV manufacturers and
policymakers may find that their ARVs are unable to
keep a meaningful presence within the road user
population. Cooperative behaviour between selfish
individuals in the natural world can only be
adequately explained using evolutionary game theory
(John Maynard Smith, 1982; J. Maynard Smith &
Price, 1973). Similarly, we argue that cooperative
behaviour in a naturally evolving road user
population with autonomous entities can only be
ensured if these entities are programmed in line with
the principles of evolutionary game theory.
The fitness and therefore success of ARVs is
governed by a cost and reward function. The
particulars of such a function vary greatly and depend
on the class of ARV in question, the prevalent driving
culture and road etiquette, and the traffic rules and
policies in place. For example, heavy goods vehicles
will skew considerably towards faster, more efficient
transport, whilst passenger vehicles may be more
sensitive to passenger comfort and satisfaction. The
values used in the examples described in this paper
have been chosen to demonstrate how the dynamic
may look under certain conditions and behavioural
patterns. However, if the road user population were to
behave differently or the network conditions be
different, it is highly probable that the resulting
dynamic will not produce evolutionarily stable
outcomes that allow for a viable ARV sub-
population. The topic of characterising and tuning the
reward and cost functions of ARVs is a subject that
requires further research.
Future research will investigate developing a
methodology by which ARVs can dynamically adapt
to changes in policy, HDV strategies, and other
factors to ensure evolutionary stability is maintained
throughout the course of ARV introduction and
beyond.
REFERENCES
Altman, E., El-Azouzi, R., Hayel, Y., & Tembine, H.
(2009). The evolution of transport protocols: An
evolutionary game perspective. Computer Networks,
53(10), 1751-1759. doi:https://doi.org/10.1016/
j.comnet.2008.12.023
Bendor, J., & Swistak, P. (1995). Types of evolutionary
stability and the problem of cooperation. Proceedings
of the National Academy of Sciences of the United
States of America, 92(8), 3596-3600.
doi:10.1073/pnas.92.8.3596
Brockmann, J. H., Grafen, A., & Dawkins, R. (1979).
Evolutionarily stable nesting strategy in a digger wasp.
Journal of Theoretical Biology, 77(4), 473-496.
doi:https://doi.org/10.1016/0022-5193(79)90021-3
Camara, F., Dickinson, P., Merat, N., & Fox, C. W. (2019).
Towards game theoretic AV controllers: measuring
pedestrian behaviour in Virtual Reality. Paper
presented at the Proceedings of TCV2019: Towards
Cognitive Vehicles.
Chatterjee, I., & Davis, G. A. (2013). Evolutionary Game
Theoretic Approach to Rear-End Events on Congested
Freeway. Transportation Research Record, 2386(1),
121-127. doi:10.3141/2386-14
Cooper, M., Lee, J. K., Beck, J., Fishman, J. D., Gillett, M.,
Papakipos, Z., Littman, M. L. (2019, 2019//).
Stackelberg Punishment and Bully-Proofing
Autonomous Vehicles. Paper presented at the Social
Robotics, Cham.
da Silva Rocha, A. B., & Salomão, G. M. (2019).
Environmental policy regulation and corporate
compliance in evolutionary game models with well-
mixed and structured populations. European Journal of
Operational Research, 279(2), 486-501.
doi:https://doi.org/10.1016/j.ejor.2019.05.040
Dawkins, R. (2016). The selfish gene (4th ed.). Oxford:
Oxford University Press.
Elvik, R. (2014). A review of game-theoretic models of
road user behaviour. Accident Analysis & Prevention,
62, 388-396. doi:https://doi.org/10.1016/j.aap.20
13.06.016
Fox, C., Camara, F., Markkula, G., Romano, R., Madigan,
R., & Merat, N. (2018). When Should the Chicken Cross
the Road? - Game Theory for Autonomous Vehicle -
Human Interactions. Paper presented at the
Proceedings of the 4th International Conference on
Vehicle Technology and Intelligent Transport Systems.
Free, C. (2018). How does Aggressive Driving Respond to
Passenger Load and Type.
Friedman, D. (1991). Evolutionary Games in Economics.
Econometrica, 59(3), 637-666. doi:10.2307/2938222
Gross, M. R., & Repka, J. (1998). Stability with Inheritance
in the Conditional Strategy. J Theor Biol, 192(4), 445-
453. doi:10.1006/jtbi.1998.0665
Hamilton, W. D. (1964). The genetical evolution of social
behaviour. I. Journal of Theoretical Biology, 7(1), 1-16.
doi:https://doi.org/10.1016/0022-5193(64)90038-4
Hammerstein, P., & Riechert, S. E. (1988). Payoffs and
strategies in territorial contests: ESS analyses of two
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
382

ecotypes of the spiderAgelenopsis aperta. Evolutionary
Ecology, 2(2), 115-138. doi:10.1007/BF02067272
Hancock, P. A., Nourbakhsh, I., & Stewart, J. (2019). On
the future of transportation in an era of automated and
autonomous vehicles. Proceedings of the National
Academy of Sciences, 116(16), 7684.
doi:10.1073/pnas.1805770115
Harris, C. M. (2017, 2017//). Autonomous Vehicle
Decision-Making: Should We Be Bio-inspired? Paper
presented at the Towards Autonomous Robotic
Systems, Cham.
Iwamura, Y., & Tanimoto, J. (2018). Complex traffic flow
that allows as well as hampers lane-changing
intrinsically contains social-dilemma structures.
Journal of Statistical Mechanics: Theory and
Experiment, 2018, 023408. doi:10.1088/1742-
5468/aaa8ff
Kandori, M. (1996). Evolutionary game theory in
economics.
Kang, K., & Rakha, H. A. (2020). A Repeated Game
Freeway Lane Changing Model. Sensors, 20(6), 1554.
Retrieved from https://www.mdpi.com/1424-
8220/20/6/1554
Karpus, J., Krüger, A., Verba, J. T., Bahrami, B., & Deroy,
O. (2021). Algorithm exploitation: Humans are keen to
exploit benevolent AI. iScience, 24(6), 102679.
doi:https://doi.org/10.1016/j.isci.2021.102679
Lei, L., & Gao, S. (2019). Transportation network
companies and drivers dilemma in China: an
evolutionary game theoretic perspective. Transport, 34,
1-12. doi:10.3846/transport.2019.11105
Liu, C., Lin, C., Shiraishi, S., & Tomizuka, M. (2018, 27-
29 June 2018). Improving Efficiency of Autonomous
Vehicles by V2V Communication. Paper presented at
the 2018 Annual American Control Conference (ACC).
Liu, L., Zhu, Y., & Guo, S. (2020). The Evolutionary Game
Analysis of Multiple Stakeholders in the Low-Carbon
Agricultural Innovation Diffusion. Complexity, 2020,
6309545. doi:10.1155/2020/6309545
Markkula, G., Madigan, R., Nathanael, D., Portouli, E.,
Lee, Y. M., Dietrich, A., . . . Merat, N. (2020). Defining
interactions: A conceptual framework for
understanding interactive behaviour in human and
automated road traffic. PsyArXiv Preprints.
doi:10.31234/osf.io/8w9z4
Meng, F., Su, J., Liu, C., & Chen, W. (2016, 31 Aug.-2
Sept. 2016). Dynamic decision making in lane change:
Game theory with receding horizon. Paper presented at
the 2016 UKACC 11th International Conference on
Control (CONTROL).
Millard-Ball, A. (2018). Pedestrians, Autonomous
Vehicles, and Cities. Journal of Planning Education
and Research, 38(1), 6-12.
doi:10.1177/0739456x16675674
Sirot, E. (2000). An evolutionarily stable strategy for
aggressiveness in feeding groups. Behavioral Ecology,
11(4), 351-356. doi:10.1093/beheco/11.4.351
Smith, J. M. (1982). Evolution and the Theory of Games.
Cambridge: Cambridge University Press.
Smith, J. M., & Price, G. R. (1973). The Logic of Animal
Conflict. Nature, 246(5427), 15-18.
doi:10.1038/246015a0
van Loon, R. J., & Martens, M. H. (2015). Automated
Driving and its Effect on the Safety Ecosystem: How
do Compatibility Issues Affect the Transition Period?
Procedia Manufacturing, 3, 3280-3285.
doi:https://doi.org/10.1016/j.promfg.2015.07.401
Wadud, Z., MacKenzie, D., & Leiby, P. (2016). Help or
hindrance? The travel, energy and carbon impacts of
highly automated vehicles. Transportation Research
Part A: Policy and Practice, 86, 1-18.
doi:https://doi.org/10.1016/j.tra.2015.12.001
Wang, S., Fan, J., Zhao, D., & Wu, Y. (2015). The Impact
of Government Subsidies or Penalties for New-energy
Vehicles A Static and Evolutionary Game Model
Analysis. Journal of Transport Economics and Policy
(JTEP), 49(1), 98-114. Retrieved from
https://www.ingentaconnect.com/content/lse/jtep/2015
/00000049/00000001/art00006
Wilkinson, G. S. (1984). Reciprocal food sharing in the
vampire bat. Nature, 308(5955), 181-184.
doi:10.1038/308181a0
Wu, C., Pei, Y., & Gao, J. (2015). Evolution Game Model
of Travel Mode Choice in Metropolitan Beijing.
Discrete Dynamics in Nature and Society, 2015,
638972. doi:10.1155/2015/638972
Xu, R., Wang, Y., Wang, W., & Ding, Y. (2019).
Evolutionary game analysis for third-party governance
of environmental pollution. Journal of Ambient
Intelligence and Humanized Computing, 10(8), 3143-
3154. doi:10.1007/s12652-018-1034-6
Yu, Y., Zhao, R., Huang, Y., & Yang, L. (2020). An
Evolutionary Game Theoretical Analysis to Conflicts
among Stakeholders Involved in the Operation of
Municipal Waste Incineration. Complexity, 2020,
8825284. doi:10.1155/2020/8825284
Zhang, L., Long, R., Huang, Z., Li, W., & Wei, J. (2020).
Evolutionary game analysis on the implementation of
subsidy policy for sustainable transportation
development. Journal of Cleaner Production, 267,
122159. doi:10.1016/j.jclepro.2020.122159
How Can Autonomous Road Vehicles Coexist with Human-Driven Vehicles? An Evolutionary-Game-Theoretic Perspective
383
