
Tuning and Costs Analysis for a Trajectory Planning Algorithm for
Autonomous Vehicles
Abdallah Said
1,2
, Reine Talj
1
, Clovis Francis
2
and Hassan Shraim
2
1
Universit
´
e de Technologie de Compi
`
egne, CNRS, Heudiasyc (Heuristics and Diagnosis of Complex Systems), CS 60 319,
60 203 Compi
`
egne Cedex, France
2
Universit
´
e Lebanonaise, Facult
´
e de G
´
enie, Centre de Recherche Scientifique en Ing
´
enierie (CRSI), Lebanon
Keywords:
Autonomous Vehicle, Trajectory Planning, Cost Analysis.
Abstract:
Trajectory planning is an essential issue for autonomous vehicles navigation. It represents a decision-making
level that considers several constraints to be respected to navigate safely and comfortably in a dynamic en-
vironment. This paper presents a reactive trajectory planning, which consists to generates several candidate
trajectories. Then, selecting the best trajectory among candidates is based on different criteria, each described
by a cost function. Indeed, the algorithm aims to minimize a global cost function, a combination of several
costs, to determine the best trajectory. The main objective of this work is to study the algorithm’s sensitiv-
ity against parameter tuning and to find a generic range of weighting coefficients for the cost function of the
planning algorithm to make the algorithm as reliable as possible against various driving conditions.
1 INTRODUCTION
An autonomous vehicle needs a local trajectory based
on real-time vehicle status and dynamic environment
perception data (e.g., nearby cars, road conditions) to
guarantee safe maneuvers while following the global
trajectory. Local trajectory planning is defined as the
planning of a vehicle’s transition from one possible
state to the next one while satisfying the vehicle’s
kinematic restrictions based on the vehicle dynam-
ics and constrained by the passenger’s comfort, lane
boundaries, and traffic rules while avoiding static and
dynamic obstacles. Different trajectory planning ap-
proaches have been developed for the navigation of
autonomous vehicles (Dixit et al., 2018), (Katrakazas
et al., 2015). They differ in how they deal with the en-
vironment and the vehicle dynamics limitations. Ac-
cording to the literature, there are four well-known
approaches to trajectory planning methods: grids gen-
eralization (Pivtoraiko and Kelly, 2005), sampling-
based planning (Karaman and Frazzoli, 2011), nu-
merical optimization methods (Lim et al., 2018) and
curve interpolation methods (Alia et al., 2015). The
last approach is adopted, and it aims to generate tra-
jectories on a given horizon with a specified geomet-
ric shape that responds to one or more constraints
such as vehicle dynamics and kinematics, comfort,
road shape, and curvature continuity. Each candidate
trajectory is assessed using a cost function that takes
into account several factors such as traveled distance
and execution time costs, acceleration, collision ver-
ification, and other performance criteria. Then, the
cost function is minimized to find the best trajectory
among several candidate trajectories generated by the
planning algorithm. Each one of these costs is mul-
tiplied by a weighting coefficient to rank its signifi-
cance. The major weakness of this approach is that,
for some trajectory shapes, the result of the planning
algorithm is highly dependent on the tuning of the
cost weights . Moreover, function of the shape of
geometric curves, which represent candidate trajecto-
ries, the algorithm is more or less dependent on tun-
ing weights. It is important to evaluate the sensitiv-
ity of the planning algorithm to the tuning parame-
ters in order to evaluate its ability to deal with the
different driving situations without the need to adapt
the parameters. In (Zhang et al., 2018), the planner’s
flexibility is defined by how many different types of
scenarios it can manage by just altering parameters
rather than modifying the fundamental issue formu-
lation or problem structures. In (Mouhagir et al.,
2017), trajectory planning based on clothoid tentacles
was adopted. Different combinations for cost func-
tion weights were proposed and the results show that
the proposed method was very sensitive to parameter
variation and some combinations were not suitable for
88
Said, A., Talj, R., Francis, C. and Shraim, H.
Tuning and Costs Analysis for a Trajectory Planning Algorithm for Autonomous Vehicles.
DOI: 10.5220/0011067700003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 88-95
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
real-time application. A study is presented in (Arnay
et al., 2016) on the impact of the weights of a cost
function with five criteria on the final behavior of the
vehicle. This planner deals with only pedestrians as
obstacles and low velocities. Several configurations
were chosen and ranked based on two behaviors.
In order to choose the best combination of
weights, the role of each cost must be investigated and
its influence in choosing the best candidate trajectory
must be understood. In this paper, impact analysis
and tuning of weighting coefficients are done on the
planning algorithm presented in (Said et al., 2021).
This paper is organized as follows: in Section 2, we
present the trajectory planning algorithm. The global
cost function and its components are detailed in Sec-
tion 2.2. Section 3 presents the proposed method and
reports the simulation results with some analysis on
the cost weights, while the final Section 4 concludes
the paper.
2 TRAJECTORY PLANNING
2.1 Presentation of the Trajectory
Planning Method
The trajectory planning algorithm must provide the
best trajectory from a set of candidate trajectories
that helps the vehicle to track a reference trajectory
while avoiding static and mobile obstacles and ensur-
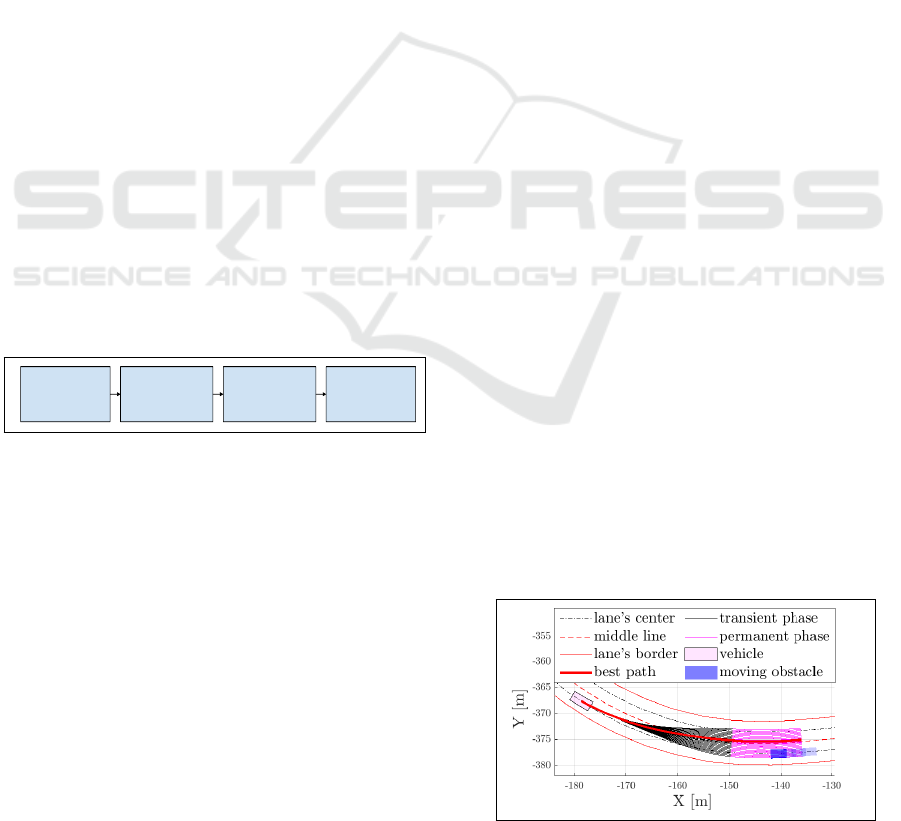
ing safety and passenger comfort. Fig.1 shows the lo-
cal trajectory planning module. Starting from match-
Generation of
candidate paths
Obstacle detection
and path
classification
Selection of the
optimal path
Cost calculation
Figure 1: Local trajectory planning module.
ing the vehicle on the reference trajectory, a set of
candidate trajectories are generated. they cover either
the host lane or the entire width of the road depend-
ing on their navigability. Each of them consists of
two phases: The transient phase, which is modeled
by a 4
th
order polynomial curve to provide a smooth
change ensuring continuity of the curvature, starts at
the actual position of the vehicle up to a defined lateral
offset from the reference trajectory. Then, the candi-
date trajectory continues with a permanent phase par-
allel to the reference trajectory where the lateral offset
becomes constant (see Fig. 2). Secondly, an obstacle
detection procedure is carried out. A classification
area is formed along the candidate trajectory by the
footprint of the vehicle. The collision distance d
obs
,
which is the free distance traveled on the trajectory to
reach the first obstacle, is then detected. Based on the
collision distance and security distance, we classify
the candidate trajectories into three classes: non, par-
tially, or fully navigable trajectory. Note that the secu-
rity distance is the distance the vehicle must maintain
between it and the encountered obstacle. It depends
on the obstacle state (static or dynamic). It is calcu-
lated based on the safe stop distance, the needed dis-
tance to stop the vehicle from its actual speed, with a
defined comfortable deceleration. If there are no nav-
igable trajectories, the algorithm selects the one with
the longest distance to the obstacle to stop the vehicle
with high deceleration (safe stop scenario). Thirdly,
the navigable trajectories are evaluated according to
various criteria, including smoothness, safety, consis-
tency with the previously selected trajectory of the ve-
hicle, and tracking of the reference center lane. All
these costs are detailed in Section 2.2. Once these cri-
teria are costed and merged into a weighted global
cost function, the chosen trajectory is the best one
with the lowest cost. Finally, a set of points, defined
by the curvilinear abscissa, x and y coordinates, ve-
locity, and curvature, depicts the best trajectory. For
more details on the planning algorithm and its imple-
mentation, please refer to (Said et al., 2021).
2.2 Cost Function Definition
The cost function is a weighted combination of costs
that should be minimized in order to find the best tra-
jectory among the many candidate trajectories gener-
ated by the planning algorithm. These costs are:
1. Smoothness Cost C
ρ
[i]:
This cost seeks to prefer lower-curvature trajecto-
ries. On the other hand, soft smoothness causes
increased lateral acceleration, which affects pas-
senger comfort. As a result, the integration of the
curvature squared along a trajectory is chosen as
a smoothness requirement for this trajectory in or-
der to reduce its slackness:
C
ρ
[i] =
Z
ρ
i
M
2
ds
i
M
(1)
Figure 2: Trajectory planning: simulation environment.
Tuning and Costs Analysis for a Trajectory Planning Algorithm for Autonomous Vehicles
89
where ρ
M
and ds
i
M
are the curvature and the curvi-
linear abscissa of a point M along the candidate
trajectory i, respectively.
2. Cost of Tracking the Reference Trajectory
C
r
[i]:
In order to position the ego vehicle in the center
of the intended lane, the vehicle must follow the
global reference trajectory. The cost of follow-
ing the reference trajectory is related to the offset
since the candidate trajectories are created around
this lane center with a given lateral offset (Fig. 2).
The reference cost in multi-lane structured envi-
ronment is determined by the vehicle’s position
in relation to the lanes. So, the reference cost is
given by:
C
r
[i] = (q
i
f
−q
re f c
)
2
, (2)
where q
i
f
is the lateral shift of the permanent
phase of the candidate trajectory i to the host lane,
q
re f c
is the lateral offset of the center of the ref-
erence lane. By default, the reference lane is the
one in which the vehicle is located: it is either the
host lane (q
re f c
= 0) or adjacent lane (q
re f c
= q
L2
).
However, in case of returning to the host lane in
an obstacle overtaking scenario, the host lane be-
comes the reference if the vehicle passes the ob-
stacle (dotted lane in Fig.3) and the host lane is
navigable. Fig.3 shows the different cases for the
definition of the reference lane.
Figure 3: Reference cost cases.
3. Consistency Cost C
c
[i]:
A quick shift in the selected trajectory between
two iterations needs a considerable control effort
and can affect the vehicle’s stability. As a result, a
measure of similarity between the prior trajectory
and the current candidate trajectory is required to
avoid generating a trajectory that is drastically dif-
ferent from that of the previous step. Our tech-
nique reduces it to the difference between the cur-
rent trajectory index i and the chosen one from a
prior planning iteration.
C
c
[i] = |i −i
t−1
des
| (3)
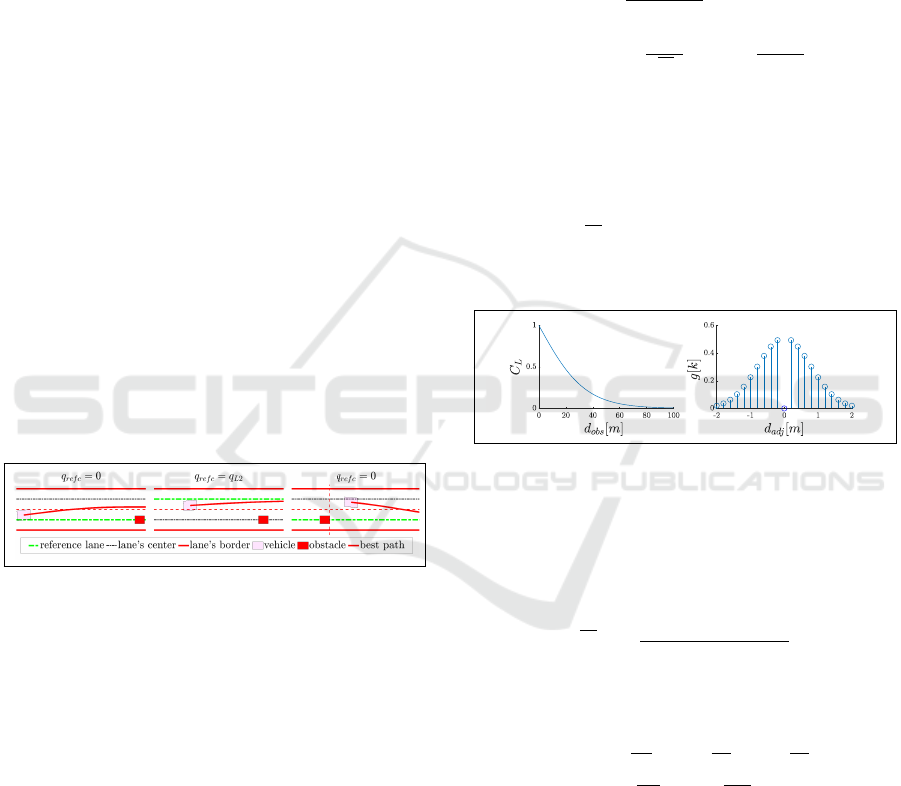
4. Safety Cost C
s
[i]:
We define two safety costs: a longitudinal cost C
sl
and a lateral cost C
sL
. The first one assesses the
trajectory’s navigability and the distance to the
first obstacle. This cost increases when the first
detected obstacle is longitudinally close and de-
creases when the obstacle is far (Fig. 4-left). The
second cost considers the navigability of nearby
trajectories and attempts to position the vehicle
laterally in the middle of the navigable zone. The
collision distance d
obs
(distance to the first obsta-
cle) is transformed into a safety cost as follows:
C
sl
[i] =
(
0 obstacle-free trajectory
2 −
2
1+e
−c
1
d
i
obs
otherwise
(4)
g[k] =
1
√
2πσ
exp
−
(k ∆q)
2
2σ
2
(5)
C
sL
[i] = (
∑
j∈Γ
i
C
sl
[ j] g[i − j]) /n
Γ
i
(6)
where c
1
is a cost setting parameter, ∆q is the de-
sired lateral sampling resolution, σ is the standard
deviation of the discrete Gaussian convolution for
the risk of collision and is calculated by consider-
ing that g[
L
v
∆q
] = 0.5, where L
v
is the vehicle width
(Fig. 4-right). Γ
i
is the set of indexes of generated
trajectories without i, n
Γ
i
is their number.
Figure 4: Safety cost.
Total Cost Function C
T
[i]:
We use the normalization technique to make the dif-
ferent cost criteria dimensionless because they are as-
sessed in different units. As a result, we use the fol-
lowing formula:
C
.
[i] =
C
.
[i] −min(C
.
)
max(C
.
) −min(C
.
)
(7)
Then, the total cost function C
T
[i] of a given tra-
jectory is defined as the weighted sum of the normal-
ized cost functions defined above:
C
T
[i] =W
ρ
C
ρ
[i] +W
c
C
c
[i] +W
r
C
r
[i]
+W
sL
C
sl
[i] +W
sl
C
sL
[i]
(8)
with W
ρ
, W
c
, W
r
, W
sL
and W
sl
the weighting coef-
ficients of smoothness, consistency, reference track-
ing, longitudinal safety and lateral safety costs respec-
tively.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
90
3 IMPACT ANALYSIS AND
TUNING OF WEIGHTING
COEFFICIENTS
3.1 Proposed Method
Our goal is to understand better each cost influence
on choosing the best trajectory and to find a generic
weighting coefficients range for the cost function of
the planning algorithm. First, we propose scenarios
with or without static or dynamic obstacles. Second,
we generate n random combinations of weighting co-
efficients, each weight is bounded between two values
(0 ≤ l
b
≤W
.
≤u
b
≤1). The random method was used
due to the high number of combinations in a classic
grid search method with five weights. Then, we run
the planning algorithm n times. The n vehicle’s tra-
jectories obtained are classified into two categories:
• T
c
complete vehicle’s trajectory set: the algorithm
manages to reach the end of the proposed scenario
without stopping or colliding with any obstacle.
• T
i
incomplete vehicle’s trajectory set: the algo-
rithm fails to reach the end of the proposed sce-
nario due to hitting an obstacle or lane’s borders.
The correlation between the obtained results and the
corresponding combinations is then analyzed accord-
ing to various factors such as the distance traveled, the
longitudinal and the lateral acceleration, the reference
tracking, the safety distance, and the overall behavior
(conservative or aggressive). Based on this analysis,
the wide range chosen first is contracted. this proce-
dure is repeated until we obtain the desired generic
range.
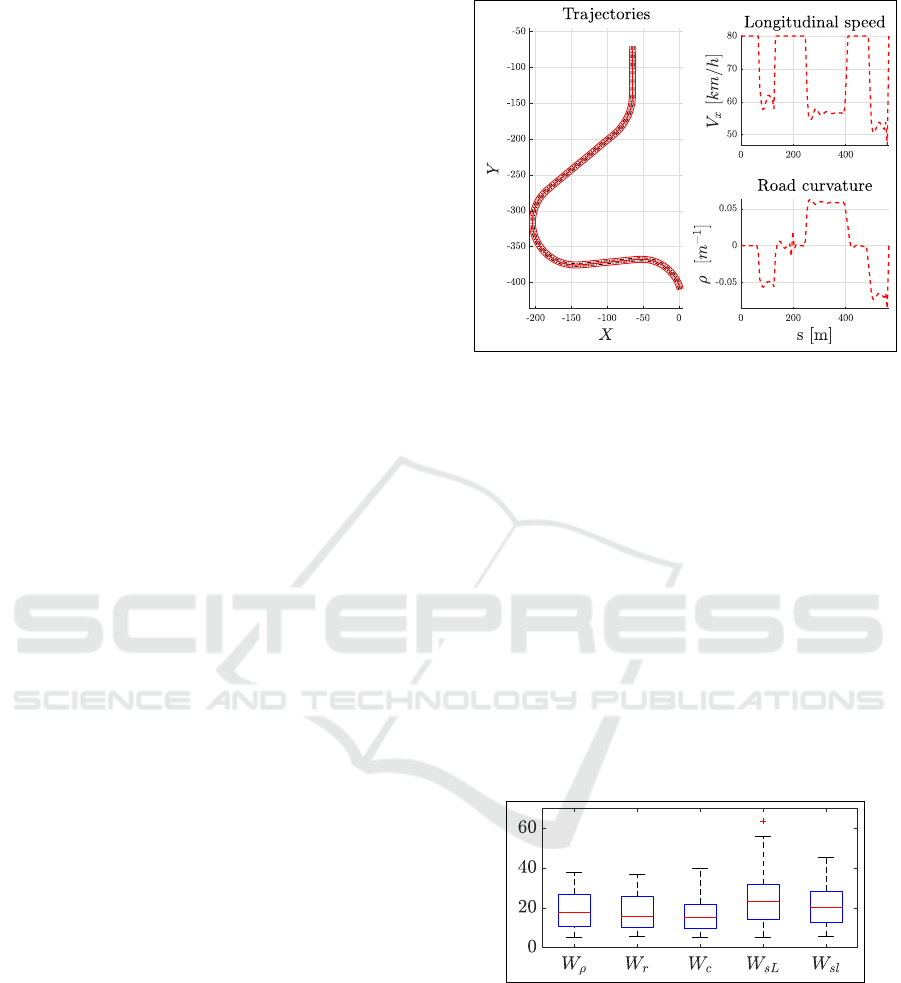
3.2 Case Study
To study the proposed method, we apply the plan-
ning algorithm on a portion of a realistic trajectory
track taken from SCANeR
T M
studio simulator, with
different scenarios, for 50 random combinations. This
trajectory and the corresponding limit speed and cur-
vature are shown in Fig. 5. Initial speed may vary
depending on the scenario. The trajectory planning
module is implemented in an autonomous driving sys-
tem composed of main modules for navigation: lo-
calization, perception, trajectory planning, control,
and vehicle model. The two last modules are run-
ning at 50 Hz while the others are running at 10 Hz.
The Renault-Zoe robotic vehicle model validated on
SCANeR
T M
studio is used.
The presented scenarios are simulated using the
combinations of weighting coefficients presented in
Fig. 6. We start with simple scenarios and large
Figure 5: Trajectory, longitudinal speed and curvature
(same legend as Fig. 2).
ranges for weighting coefficients. The smoothness,
reference, and consistency coefficients ranges are
chosen to be between 5% and 40% as they are used for
performance purposes,while the coefficients ranges of
safety costs are greater: The longitudinal safety one
is between 5% and 65%. The lateral safety one is be-
tween 5% and 50%. These ranges are chosen based
on evident knowledge about the algorithm and pre-
liminary simulations. Safety is prior to performance
while deciding the trajectory for autonomous naviga-
tion. Outside of these ranges, the planning algorithm
does not give reasonable trajectories that can be ex-
ecuted. It will either give an extremely smooth with
high smoothness weight or aggressive trajectory with
high reference weight that will try to follow the lane’s
center.
Figure 6: Box plot of 50 combinations of weighting coeffi-
cients.
In the following, for each scenario, we illustrate
the generated trajectories for all combinations and the
final reached points for the same time horizon in order
to analyze the results.
3.2.1 Scenario 1: Static Obstacle Overtaking
The scenario presented in Fig. 7 consists of an over-
taking of two static obstacles, each one on a lane sep-
Tuning and Costs Analysis for a Trajectory Planning Algorithm for Autonomous Vehicles
91
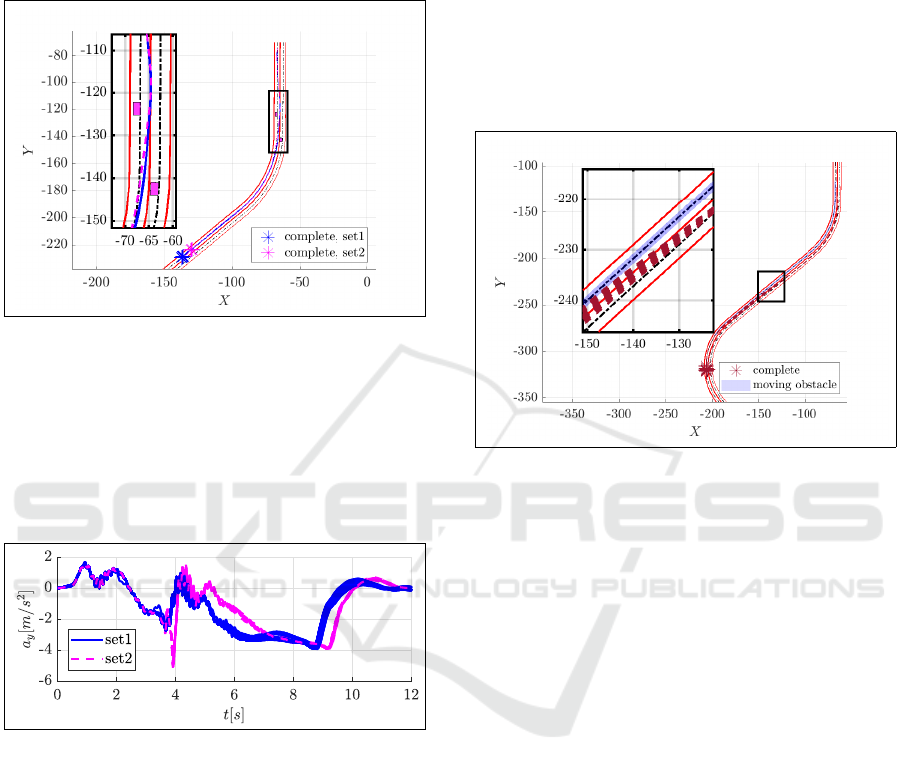
arated by a distance of 15m. This distance is con-
sidered small, taking into account the lane’s desired
speed (65km/h), and for this, the algorithm pushes the
vehicle to brake when it slaloms between obstacles.
Figure 7: Scenario 1: trajectories in presence of 2 static
obstacles (same legend as Fig. 2).
In some combinations, where the sum of smooth-
ness and consistency weights is significant (Set 2:
W
ρ
> 12% or W
c
> 13% ), the vehicle crosses the
trajectory with a high lateral acceleration value (>
4m/s
2
) as shown in set 2 in Fig. 8, where set 1 repre-
sents trajectories with the remaining combinations.
Figure 8: Scenario 1: lateral acceleration.
The smoothness cost leads the vehicle to move
straight towards the obstacle, especially if the longitu-
dinal safety weighting coefficient is too small. In con-
trast, the consistency cost delays the lane change until
the last possible moment before reaching the safe stop
distance, and this results in strong lateral acceleration.
Then the algorithm proceeds to additional braking to
ensure lateral stability. We note here that the devel-
oped algorithm is able to execute the trajectory safely,
even with small safety weighting coefficients. As we
can see in Fig. 7, all trajectories can reach the end
of the scenario, and with almost a 10m difference be-
tween their ends due to additional braking on some
trajectories (set 2). However, we can note that the
trajectories with high lateral safety (W
sl
> 40%) and
reference (W
r
> 20%) weighting coefficients execute
the longest distance and hence offers the highest lon-
gitudinal speed.
3.2.2 Scenario 2: Mobile Obstacle Overtaking
The second scenario is a simple overtaking of a mo-
bile obstacle at 40km/h where the vehicle speed dur-
ing overtaking reaches 50 to 60km/h. As we can see
in Fig. 9, all trajectories can reach the end of the sce-
nario.
Figure 9: Scenario 2: trajectories in a mobile obstacle over-
taking (same legend as Fig. 2).
The difference between trajectories can be seen in
Fig. 10 when overtaking and returning to the host
lane. The security inter-distance is respected in all
combinations but leads to more or less conservative
behavior depending on the reference weighting coef-
ficient. For all combinations, the vehicle starts over-
taking before 35m, which is the security distance cor-
responding to its velocity. However, the overtaking
starts earlier with a high lateral safety weight. How-
ever, when returning to the lane, the inter-distance of
the first trajectory that reaches the host lane’s center
is equal to 22m, which is equal to 2 seconds of ob-
stacle’s speed. Set 4 in Fig.10 represents trajectories
with smoothness weight W
ρ
higher than > 30%.
In this set, the three trajectories with a late return
to the lane have in addition a low reference weight
W
r
< 7%, while the rest of the trajectories try hard to
follow the center of the track.
Furthermore, the reference cost acts on the ve-
hicle stability: a high reference weight with low
smoothness or consistency weight (set5: W
r
> 15%
and (W
ρ
< 6% or W
c
< 6%) ) leads to a higher lat-
eral acceleration compared to other combinations (see
Fig.11) and may result in a passenger’s discomfort,
due to late change lane and rapid return to the host
lane.
Note that set 3 represents trajectories with the re-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
92
maining combinations.
Figure 10: Scenario 2: Frenet frame.
Figure 11: Scenario 2: lateral acceleration.
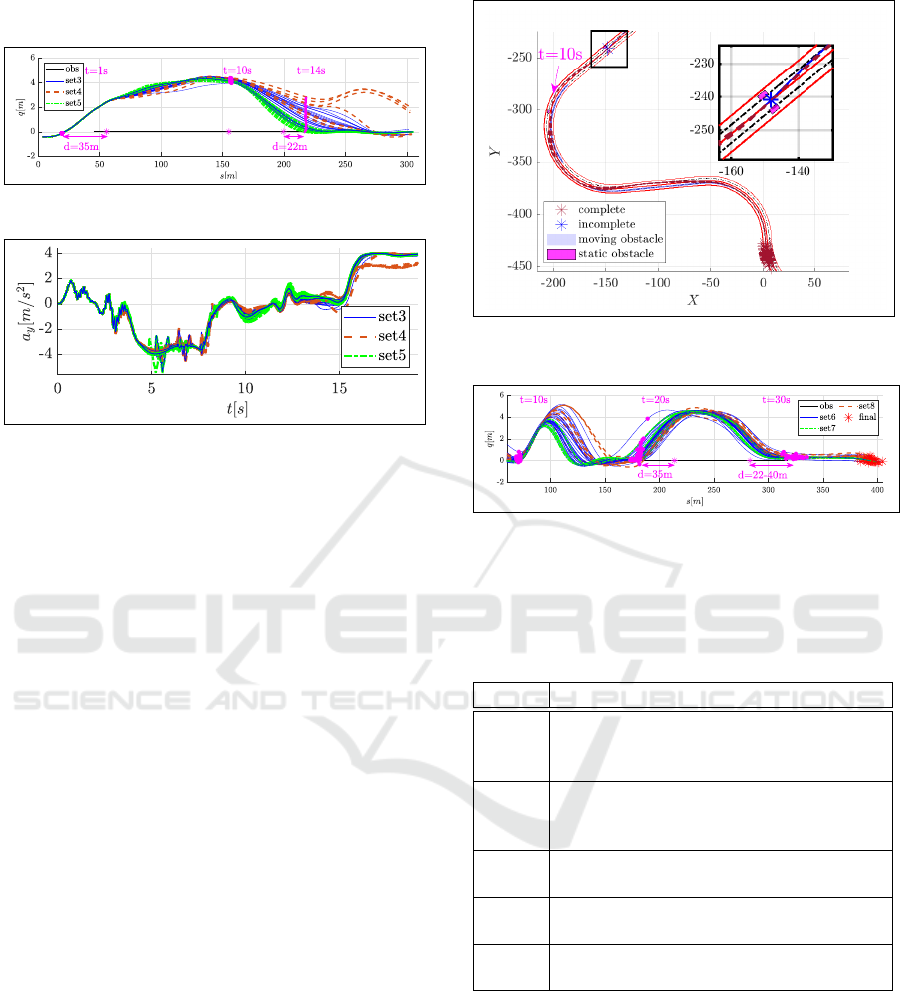
3.2.3 Scenario 3.1: Multi-maneuver Scenario
This scenario combines several maneuvers: reference
tracking, tight passage, static obstacle overtaking with
a mobile obstacle on the adjacent lane in the opposite
direction (t = 10s), and mobile obstacle overtaking
(t = 20s).
As we can see in Fig.12, 92% of the generated
trajectories can complete the scenario.
The incomplete trajectories fail at the tight pas-
sage: the classification area around the trajectory,
which is a little larger than the vehicle’s imprint, de-
tects hitting one of the obstacles. The four failed com-
binations have low lateral safety weights ( W
sl
< 10%)
value and high reference weight (W
r
> 30%).
This result is expected as the reference cost forces
the vehicle to track the reference lane while the lateral
safety cost tries to pass it in the middle of the naviga-
ble zone.
Fig.13 represents the generated trajectories in the
Frenet frame. We can see a significant difference
between the trajectories. After t = 10s, we notice
that a high reference and lateral safety weights (set
7: W
r
> 18% and W
sl
> 30%) lead to an early re-
turn to the host lane, while those with low reference
weight and high smoothness weights (set 8: W
r
< 8%
and W
ρ
> 25%) were late to return and overtake. In
addition, the last one to return was the one with a
high value of smoothness weight (W
ρ
= 39%) and
caused over-steering when trying to follow the ref-
erence (s = 170m). At the overtaking of the mobile
obstacle (t = 20s), the high lateral safety weight leads
to earlier overtaking and then to an earlier return to
the lane. The longest trajectories were those with the
Figure 12: Scenario 3.1: trajectories (same legend as Fig.
2).
Figure 13: Scenario 3.1: Frenet frame.
high lateral safety weight (W
sl
= 45% of the longest
one). Note that set 6 represents trajectories with the
remaining combinations.
Table 1: Cost analysis results.
cost result
W
ρ
high value of smoothness weight leads
to a late lane change, high a
y
and
over/under steer
W
r
high value of reference weight leads to
an early lane change, high a
y
, prioritize
reference tracking over safety
W
c
high consistency weight leads to high a
y
(> 0.4g)
W
sL
high lateral safety weight leads to
longest path, early lane change;
W
sl
longitudinal safety weight has a similar
effect to lateral safety ;
From these results, we can deduce that the
smoothness, reference, and consistency weighting co-
efficients should be limited to relatively small values.
Indeed, a high reference weight coefficient can be ag-
gressive in a dual lane change scenario. Furthermore,
high smoothness and consistency weights may cause
a delay in response to the change in curvature. Con-
sequently, bounded combinations are applied in the
following simulation scenario.
Tuning and Costs Analysis for a Trajectory Planning Algorithm for Autonomous Vehicles
93
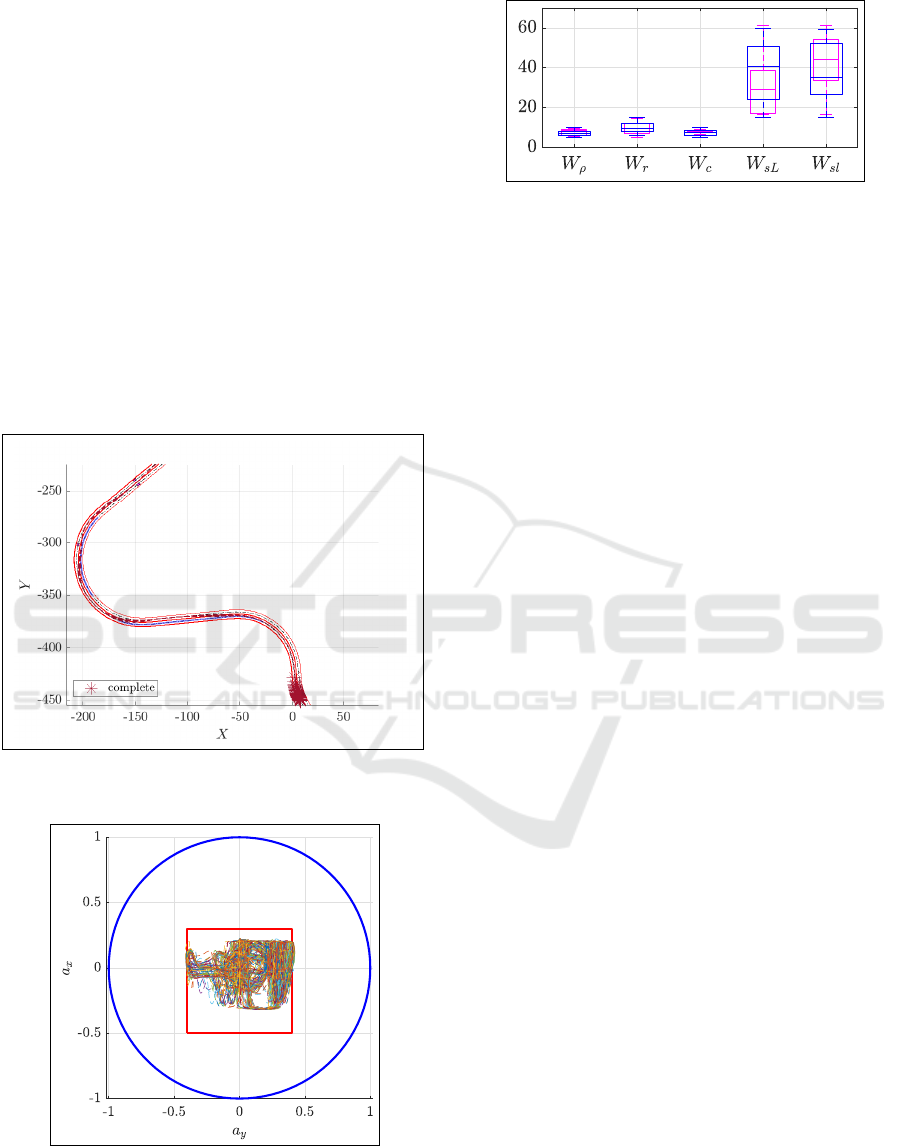
3.2.4 Scenario 3.2: Multi-maneuver Scenario
with Limited Combinations
After many tests and simulations, we decided to limit
the ranges of weighting coefficients around the most
favorable values. The new range proposed for combi-
nations of weighting coefficients is between 5% and
10% for smoothness and consistency cost’s weights,
between 5% and 15% for reference cost’s weight, and
between 15% and 65% for longitudinal and lateral
safety cost’s weights.
These new ranges are applied to the same scenario
of 3.2.3. As we can see in Fig. 14, all trajectories can
reach the end of the scenario, and the difference at
the arrival point is less than 5m for different combina-
tions of trajectories. In addition, it shows that all tra-
jectories can pass smoothly and follow the reference
without any accident.
Figure 14: Scenario 3.2: trajectories (same legend as Fig.
2).
Figure 15: g-G diagram for 50 combinations in a 0.4g red
box.
Using a normalized friction circle and the g-g dia-
gram, we show that the planning algorithm can main-
normal A
y
:44/50;
high A
y
:6/50
Figure 16: Box plot of combinations of weighting coeffi-
cients.
tain the vehicle for all combinations in the comfort
region (red rectangle in Fig.15). A classification of
combinations based on maximal lateral acceleration
reached with a threshold of 0.38g is done. The results
are illustrated using the box plot shown in Fig.16: A
high lateral acceleration is reached with a low lateral
safety weight and a high reference weight. This be-
havior is expected due to the late lane change. Note
that even the combinations presenting high lateral ac-
celeration values still have an acceleration less than
0.4g as shown in Fig.15.
Note that these combinations are simulated for all
the previous scenarios and succeed in reaching their
ends.
3.2.5 Scenario 3.3: Longitudinal and Lateral
Safety Costs
To better understand the impact of the two compo-
nents of the safety cost of the algorithm behavior,
we simulate the third scenario with a fixed value for
smoothness, reference, and consistency weights as
8%, 14% and 8% respectively, while the range of the
two safety costs is between 15% and 65%.
All combinations succeed in finishing the scenario
smoothly with a lateral acceleration inside the com-
fort zone.
3.3 Discussion about Costs Influence
Correlation
The results presented above give us a better under-
standing of the different costs that influence choos-
ing the best trajectory. These simulations helped us
to improve the planning algorithm. A good combina-
tion weight coefficients leads the vehicle to track the
reference lane and to overtake smoothly and safely
in the presence of obstacles, when overtaking is pos-
sible, without an abrupt lane change. Moreover, the
planning algorithm respects the safety distances with
all static and mobile obstacles and stops the vehicle
if needed when no navigable trajectory is detected.
The smoothness cost, as defined, tries to move the ve-
hicle straight forward as much as possible. Unfor-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
94

tunately, it delays the lane return with low reference
cost or high consistency cost. The consistency cost
acts as a damper of the vehicle’s motion by delaying
the variation of the vehicle’s orientation. Concern-
ing the reference cost, it plays an essential role, as
presented before in all the scenarios. When encoun-
tering an obstacle, a high reference weight causes a
high lateral acceleration, especially for the combina-
tion where the consistency or smoothness weight is
low or the lateral safety weight is low. The safety
cost guides the vehicle very well in the navigable zone
and respects the inter-distances. In some cases, the
costs identified above may correlate with each other.
For example, in the case of lane following, the lateral
safety cost correlates with the reference tracking cost
by maximizing the lateral safety cost of candidate tra-
jectories near the lane borders and thus minimizing
those towards the lane’s center. On the other hand,
they behave differently when the lateral safety cost
tries to position the vehicle in the middle of the navi-
gable zone, away from the reference lane. The higher
is the reference cost; the earlier is the host lane track-
ing. Finally, choosing the different weights of the cost
function components must obey to a compromise be-
tween the other considered criteria. It is crucial to
prioritize safety on performance. The present analy-
sis shows that the proposed planning algorithm is ro-
bust against the cost weights variation. Moreover, this
study allows us to identify the more suitable ranges
for the different weights to arrive to a robust combi-
nation. Hence, the objective is to arrive to a planning
algorithm tuning as generic as possible to the varia-
tion of driving conditions in a dynamic environment.
The combination 8%, 14%, 8%, 40%, and 30% for
smoothness, reference, consistency, longitudinal and
lateral safety weights, respectively, is adopted as be-
ing a good compromise between safety and perfor-
mance.
4 CONCLUSION
In this paper, after presenting briefly the local trajec-
tory planning method developed, we have introduced
the method used to determine, analyze and fine tune
the best ranges of the different weights of the trajec-
tory planning cost function. The planning algorithm
is tested using a variety of scenarios and ranges of
weights combinations. This study shows the role of
each cost in determining the best overall trajectory
and leads us to select a range for each cost weight.
We can conclude that the planning algorithm is robust
to the variation of the cost weighting, which repre-
sents a significant advantage for encountering various
driving situations and conditions in a dynamic envi-
ronment, without the need for re-adjusting and tuning
the planning algorithm.
REFERENCES
Alia, C., Gilles, T., Reine, T., and Ali, C. (2015). Local
trajectory planning and tracking of autonomous vehi-
cles, using clothoid tentacles method. In 2015 IEEE
intelligent vehicles symposium (IV), pages 674–679.
IEEE.
Arnay, R., Morales, N., Morell, A., Hernandez-Aceituno,
J., Perea, D., Toledo, J. T., Hamilton, A., Sanchez-
Medina, J. J., and Acosta, L. (2016). Safe and reliable
path planning for the autonomous vehicle verdino.
IEEE Intelligent Transportation Systems Magazine,
8(2):22–32.
Dixit, S., Fallah, S., Montanaro, U., Dianati, M., Stevens,
A., Mccullough, F., and Mouzakitis, A. (2018). Tra-
jectory planning and tracking for autonomous over-
taking: State-of-the-art and future prospects. Annual
Reviews in Control, 45:76–86.
Karaman, S. and Frazzoli, E. (2011). Sampling-based algo-
rithms for optimal motion planning. The international
journal of robotics research, 30(7):846–894.
Katrakazas, C., Quddus, M., Chen, W.-H., and Deka, L.
(2015). Real-time motion planning methods for au-
tonomous on-road driving: State-of-the-art and future
research directions. Transportation Research Part C:
Emerging Technologies, 60:416–442.
Lim, W., Lee, S., Sunwoo, M., and Jo, K. (2018). Hierar-
chical trajectory planning of an autonomous car based
on the integration of a sampling and an optimization
method. IEEE Transactions on Intelligent Transporta-
tion Systems, 19(2):613–626.
Mouhagir, H., Cherfaoui, V., Talj, R., Aioun, F., and Guille-
mard, F. (2017). Trajectory planning for autonomous
vehicle in uncertain environment using evidential grid.
IFAC-PapersOnLine, 50(1):12545–12550.
Pivtoraiko, M. and Kelly, A. (2005). Efficient constrained
path planning via search in state lattices. In Interna-
tional Symposium on Artificial Intelligence, Robotics,
and Automation in Space, pages 1–7. Munich Ger-
many.
Said, A., Talj, R., Francis, C., and Shraim, H. (2021). Lo-
cal trajectory planning for autonomous vehicle with
static and dynamic obstacles avoidance. In 2021 IEEE
International Intelligent Transportation Systems Con-
ference (ITSC), pages 410–416. IEEE.
Zhang, Y., Chen, H., Waslander, S. L., Yang, T., Zhang,
S., Xiong, G., and Liu, K. (2018). Toward a more
complete, flexible, and safer speed planning for au-
tonomous driving via convex optimization. Sensors,
18(7):2185.
Tuning and Costs Analysis for a Trajectory Planning Algorithm for Autonomous Vehicles
95
