
Audio Circuits Evolution through Genetic Algorithms
P. H. G. Coelho, J. F. M. do Amaral, E. N. Da Rocha and M. C. Bentes
State Univ. of Rio de Janeiro, FEN/DETEL, R. S. Francisco Xavier, 524/Sala 5001E, Maracanã, RJ, 20550-900, Brazil
Keywords: Genetic Algorithms, Artificial Intelligence Applications, Evolutionary Electronics.
Abstract: This paper focuses on the implementation of an extrinsic platform in order to develop audio electronic
circuits with known topologies. This platform uses genetic algorithms to choose the best components to
achieve a specific goal. All the proposed topologies have been consolidated in the audio market and due to
this aspect, the technique has not proposed new possibilities for them. However, the generation mechanism
of these alternatives is studied in depth, approaching their theoretical potential. User specifications of the
proposed interface define the evolution of the circuit. The developed platform compares the graphic of a
simulation with a graphic which is generated by a function in MATLAB. The similarity between these
curves is used as the fitness function to evolve the circuit components values. All the work was done in
MATLAB and Simulink. As MATLAB is used to run the codes and create desired curves with its function,
its tool Simulink is used to simulate circuits and to carry out transfer functions analysis. Case studies are
presented to illustrate the method which are analogic filters used in audio applications. These circuits were
evolved by using the free package GAOT for MATLAB.
1 INTRODUCTION
Evolutionary projects are proposals for global
optimization and can be understood as search
procedures for optimal solutions, in order to design a
project. Artificial intelligence is usually inspired by
nature for modeling algorithms. Examples are neural
networks based on brain behavior, genetic
algorithms inspired on biological evolution and
other approaches found in works of researchers in
the field of artificial intelligence. For instance, the
Gray Wolf Optimizer (GWO) proposed by (Mirjalili
et al., 2020) is a stochastic algorithm based on the
hunting behavior of a pack of gray wolves. This
paper will address applications through the use of
genetic algorithms, whose properties will be used in
the field of evolutionary electronics. Its operations
have little complexity, and its structure has very
well-defined, easy-to-understand steps. The act of
programming, in general, has been inspired by
nature even for naming its terms. Artificial
intelligence is no exception for this aspect. For
example: Object-oriented languages work with the
concept of inheritance, that is, a child class can
inherit certain attributes from the parent class, as
desired by the coder. It is also common for these
terms to appear in articles e.g., the Heapsort sorting
algorithm, (
Sedgewick, 1998) which uses parent and
child elements. Evolutionary electronics purpose is a
new paradigm for problem solving inspired by
Natural Selection as proposed by Darwin, conceived
after his observations carried out in the Galapagos
Islands. From the observation of birds with different
beaks on these islands, the scientist concluded that
the birds should have a common ancestor, but would
have evolved in different environments: those that
underwent beneficial mutations for their
environment survived and managed to pass their
traits on to their descendants (Coello Coello, 1999)
(Coello Coello, 2013). It was proposed that species
could always change over time, and that new species
would emerge from pre-existing species, all of
which would share a common ancestor. In this
model, each species has a unique set of heritable
genetic differences compared to the common
ancestor, which gradually accumulated over time.
Repeated events of differentiation, in which new
species diverge from their common ancestor,
produce a multilevel "tree" that connects all living
things, known as Darwin's tree for life. When
developing an evolutionary platform, the practitioner
must choose one of three implementation methods:
intrinsic, extrinsic, or hybrid (Greenwood and
Tyrrel, 2007), (Reorda et. al., 2017). In the intrinsic
514
Coelho, P., M. do Amaral, J., N. Da Rocha, E. and Bentes, M.
Audio Circuits Evolution through Genetic Algorithms.
DOI: 10.5220/0011062500003179
In Proceedings of the 24th International Conference on Enterprise Information Systems (ICEIS 2022) - Volume 1, pages 514-520
ISBN: 978-989-758-569-2; ISSN: 2184-4992
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
evolutionary platform, the circuit is designed in
hardware by the genetic algorithm. The
implementation also takes place in hardware. In the
extrinsic evolutionary platform this entire process
takes place in software. The hybrid platform mixes
the concept of both. The first method is better in
terms of the possibility of also being able to verify
the circuit's operation physically, while the second
only addresses the operation through a simulator.
This work will follow the second option and
presents the implementation of an extrinsic platform,
in order to enable the evolution of usual audio
electronic circuits. The modeling presented is based
on a genetic algorithm for evaluating the choices of
components that approximate the circuit's operation
to the desired specification. This paper is organized
in four sections. The second section describes the
basics of evolutionary environment and the proposed
platform. Section three discusses case studies in
connection with the evolutionary circuits’ platform.
Finally, section four ends the paper with the
conclusions.
2 EVOLUTIONARY PLATFORM
2.1 Extrinsic Platform
The extrinsic platform (Coelho et. al., 2021) is
carried out through the use of circuit simulators,
with implementation only in software. It gives the
designer more freedom to find more varied solutions
regarding topology. There is no limitation on the
types and components that can be used in the
population. However, extrinsic evolution will
require a much longer time compared to its intrinsic
equivalent, requiring high processing capacity of the
machine on which the genetic algorithm and
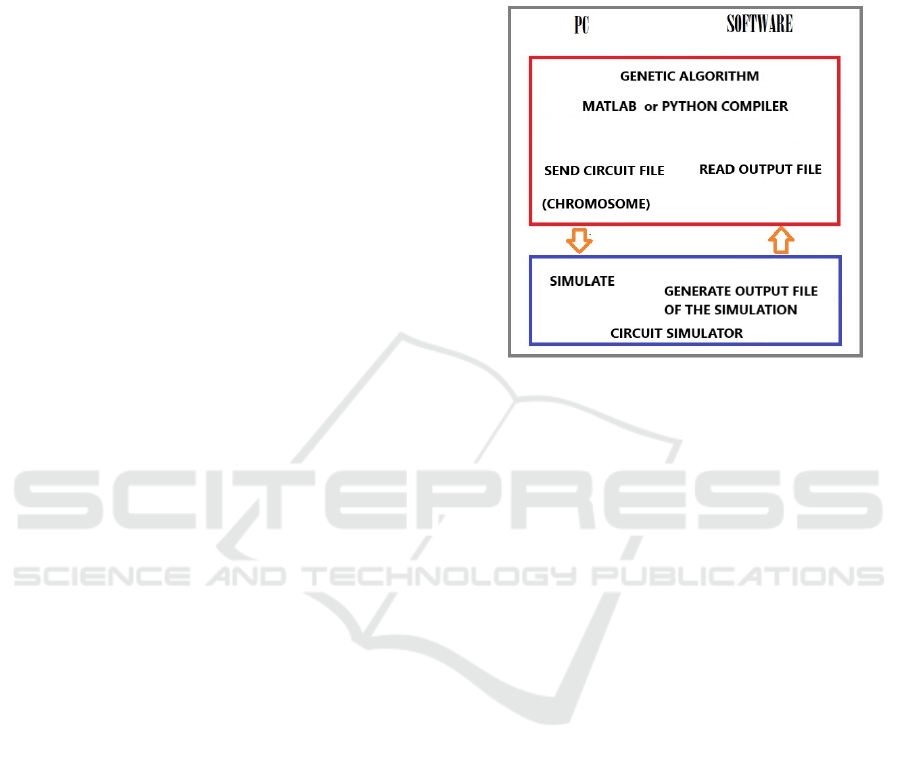
simulator will be executed. Figure 1 shows the
working diagram of this type of platform.
The simulator brings to the process the ability to
establish a specific configuration for calculations of
some regime parameters such as noise, temperature
and others, and thus generate candidates even closer
to the desired ones.
The developed platform focuses
on analyzing the numerical values generated by the
genetic algorithm directly within MATLAB, which
was used to trigger Simulink within the development
environment itself, to simulate the circuit with the
solutions proposed by the genetic algorithm and also
to obtain functions circuit transfer. MATLAB has
several toolboxes, some important for the area of
artificial intelligence, such as neural networks,
genetic algorithms and fuzzy logic. There is a
toolbox named GAOT (Genetic Algorithm
Optimization Toolbox) whose algorithm was
developed by researchers at North Caroline State
University, so that it could be used directly within
the MATLAB development environment.
Figure 1: Extrinsic platform.
This toolbox was used in this work for several
reasons, the main one is that it has open code,
without any restrictions for changes. It should be
noted that MATLAB has an optimization function
based on genetic algorithms, the GA function, which
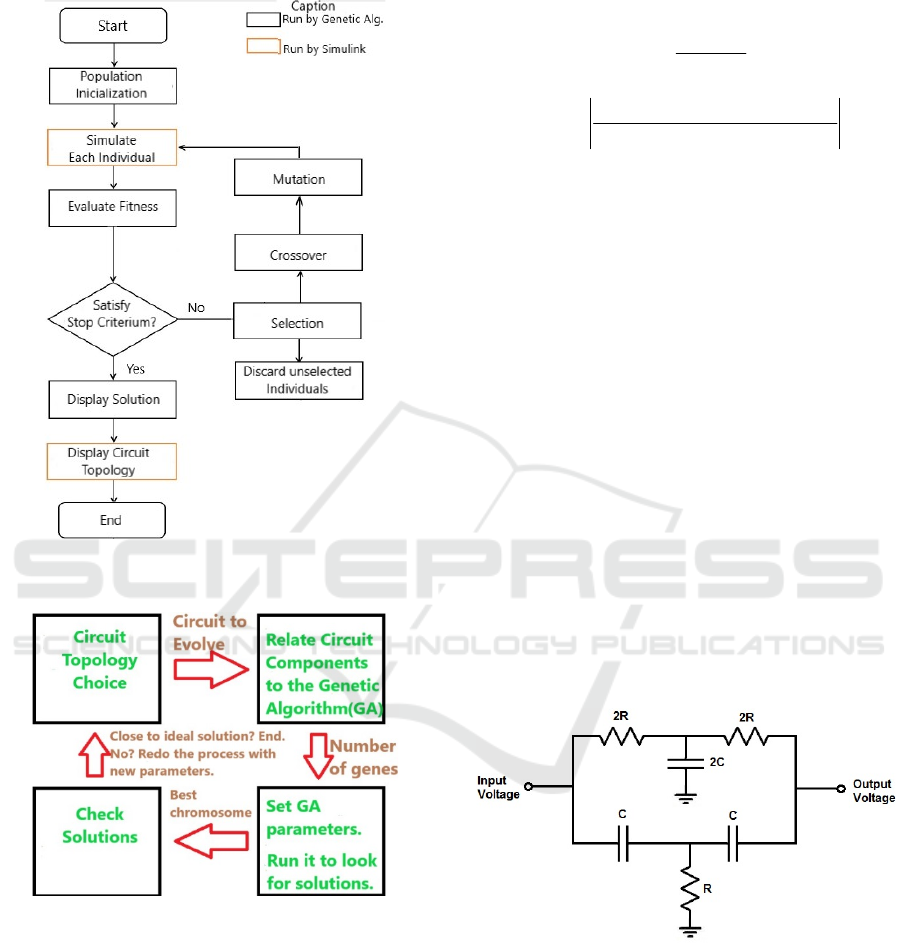
comes with the software. Figure 2 shows a flowchart
of the developed evolution platform, based on a
genetic algorithm, allowing the transfer function of a
circuit to be obtained, and also the analysis of any
system through this function. Simulink has two
functions within the platform. It is used to obtain
circuit transfer functions, at the time of modeling, in
which the platform user does not know the
mathematical description of the relationship between
the output and input of the circuit. In addition, it can
be used as a simulator after obtaining the optimal
values. In order to make the platform's operation
clearer, figure 3 presents a brief description of the
evolution process. First, the circuit topology is
chosen for the evolution of the component values.
Next, their ranges of values are related to the genes
of the individuals in the genetic algorithm, thus
determining the size of the chromosomes. After
these steps, the parameters for executing the genetic
algorithm must be defined. This configuration will
depend on the designer's objective as well as the
design specifications. Finally, the solution is
analyzed using the best chromosome, i.e. the transfer
function obtained for the optimal solution is
compared with the one considered ideal, that is, the
one conceived by a MATLAB function. The
Audio Circuits Evolution through Genetic Algorithms
515
comparison match is a guarantee that the evolved
circuit meets all circuit specifications.
Figure 2: Flowchart of the evolutionary platform using
GAOT.
Figure 3: Evolution process through the extrinsic platform.
2.2 Platform Facts
The extrinsic platform development steps are then:
1. Choose the topology for which an optimal
solution is sought.
2. Describe the behavior of the circuit that
comprises the modeling of its frequency
response.
3. Calculate the error.
4. Obtain the desired evolved circuit.
The choice of the fitness function in order to assess
the evolutionary adequacy of the platform is given
by equations 1 and 2.
1
1
Fitness
error
=
+
(1)
1
() ()
N
Goal Observed
i
Output i Output i
error
N
=
−
=
(2)
3 CASE STUDIES
The developed extrinsic platform is capable of
synthesizing a circuit and presenting an optimal
solution, given the specification and topology of a
circuit. In order to analyze its efficiency, several
case studies were developed for the analysis of the
electronic evolutionary process, of which two were
selected. The first case addresses a notch filter for
which an optimal solution was sought that would
meet an attenuation at a specific frequency. The
second case study is a low pass filter, aiming to meet
a first order active filter.
3.1 Case Study 1: Notch Filter
Notch filters, also known as band-rejectors, are
conceived in their idealization through the
superposition of a high-pass filter and a low-pass
filter. The notch filter used is based on the topology
shown in Figure 4.
Figure 4: Notch filter basic circuit.
The evolution parameters are:
• Number of generations: 100
• Number of individuals per generation: 100
• Crossover Probability: 0.85
• Probability of mutation: 0.001
Circuit specifications are given in table 1.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
516
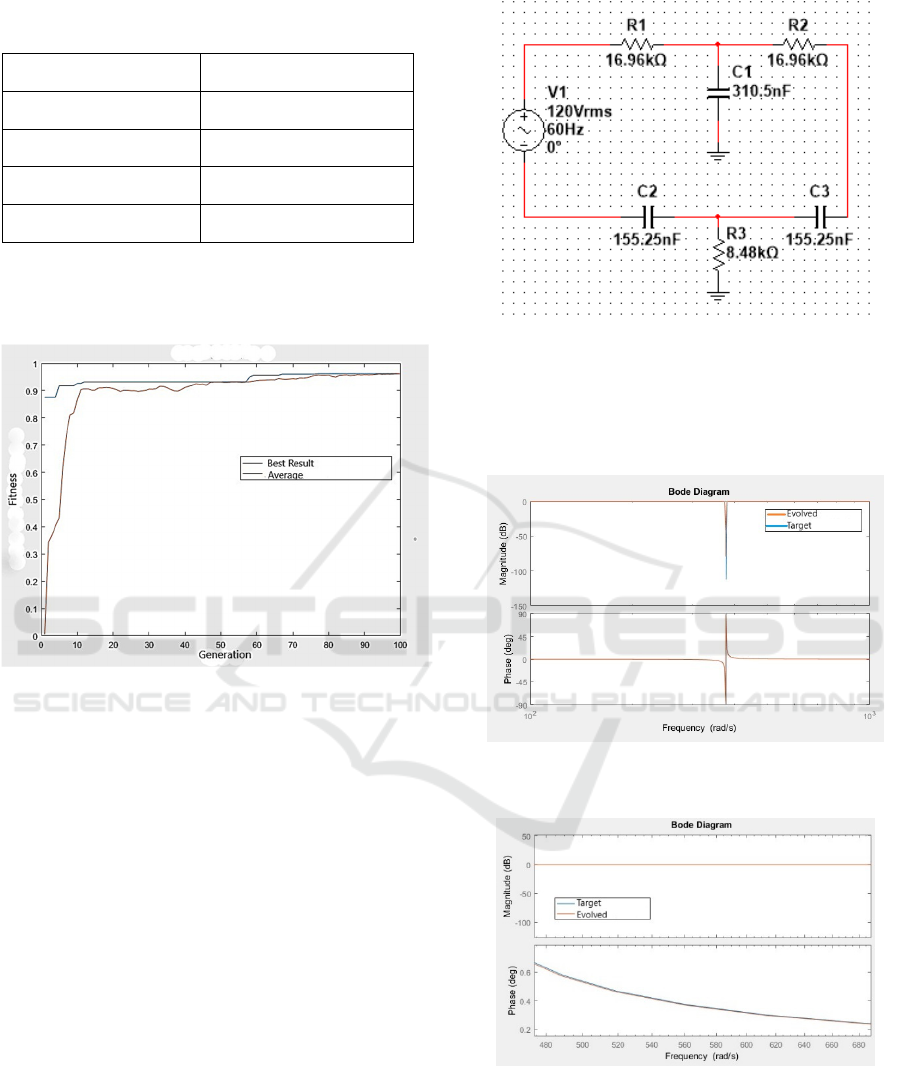
Table 1: Range of resistor and capacitor values for
simplified notch filter topology.
Parameters Range of Values
Resistor 10 kΩ - 100 kΩ
Capacitor 100 nF - 700 nF
Attenuated Bandwidth 2 Hz
Attenuation frequency 60 Hz
Figure 5 shows the evolution of fitness for individuals in
the population from the genetic algorithm to the notch
filter.
Figure 5: Notch filter evolution.
The fitness curve starts from a relatively high value
(approximately 0.85) and quickly converges to 0.95.
The average fitness converges to a value close to
0.95 as well. It is possible to simulate the circuit in
Simulink or any external simulator. The evolved
notch filter including the values proposed by the
genetic algorithm is shown in Figure 6. The
proposed platform does not work with components
commercial values. Therefore, it is necessary to
adapt the values obtained, either considering the loss
of efficiency, exchanging for the equivalent of a
close value, or associating resistors and capacitors to
be as close as possible to the solution proposed by
the genetic algorithm. After obtaining the optimal
values, it is possible to simulate the circuit in
Simulink or any other external simulator. Therefore,
the response curve of the circuit evolved by the
genetic algorithm on the platform and the target
response curve can be compared.
Figure 6: Notch filter evolved circuit.
Figures 7 and 8 show the graphs of the Bode
frequency response in magnitude and phase of the
evolved curve and that of the target, confirming the
high degree of similarity between them.
Figure 7: Notch filter frequency response for target and
evolved circuit.
Figure 8: Notch filter in the region after the rejection band.
3.2 Case Study 2: Low Pass Filter
The low pass filter chosen for the evolution was an
active filter, composed of op-amp, resistors and
capacitor whose basic circuit is shown in figure 9.
Audio Circuits Evolution through Genetic Algorithms
517
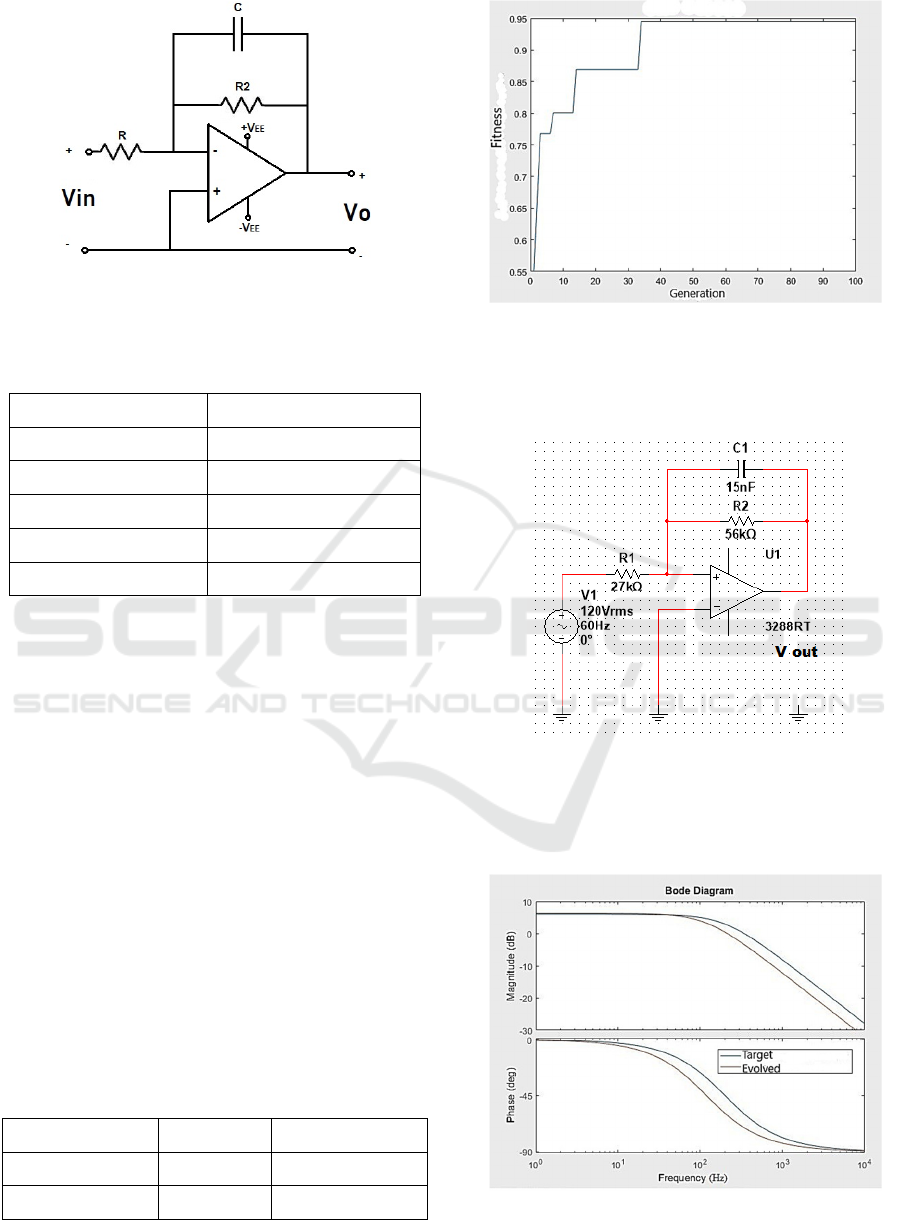
Figure 9: Low pass filter basic circuit.
The filter specifications are shown in Table 2.
Table 2: Low pass filter specifications.
Parameters Range of Values
Resistor 10 kΩ - 100 kΩ
Capacitor 0.01 nF - 10 nF
Gain 2
Quality Factor (Q) 4
Cut-off Frequency 200 Hz
The evolution parameters considered for the present
case are:
• Number of generations: 100
• Number of individuals per generation: 30
• Crossover Probability: 0.95
• Probability of mutation: 0.001
Figure 10 shows the evolution of fitness for the low
pass filter case study for the best chromosome. It is
noted that, unlike the graph generated for the notch
filter case, the first generations would not provide
good solutions for the circuit. The evolution of each
generation in relation to the previous one was more
significant. Note also that, again, the maximum
fitness stabilized at a value close to 0.95. However,
this value was reached with fewer generations than
in the previous case, and, again, the convergence of
the algorithm was fast. Table 3 summarize
satisfactory results obtained for the evolution of the
low pass filter.
Table 3: Summary results for the low pass filter.
Parameter Value Error
Gain 2.09 0.09
Cut-off Frequency 196 Hz 4 Hz
Figure 10: Low pass filter evolution best result.
The evolved low pass filter including the values
generated by the extrinsic platform is shown in
Figure 11.
Figure 11: Low pass filter evolved circuit.
Figure 12 compares the frequency responses of the
target and the evolved low pass filter indicating the
good performance of the extrinsic platform.
Figure 12: Low pass filter frequency response for target
and evolved circuit.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
518
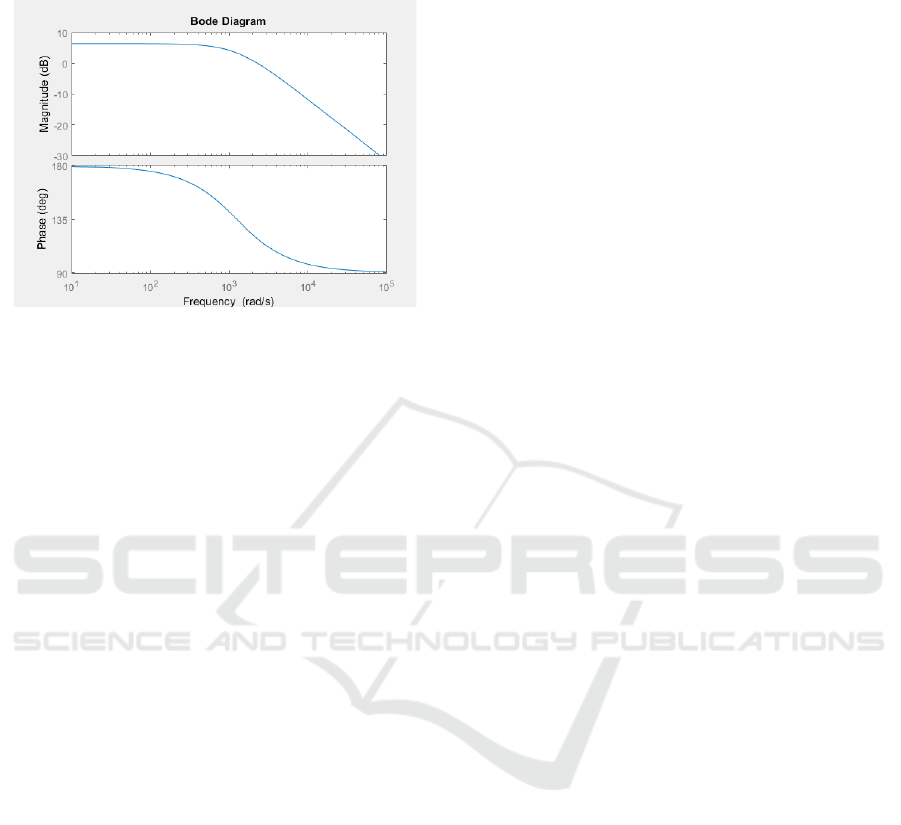
Finally, figure 13 show the Bode diagram of the
evolved low pass filter as conceived by the platform.
Figure 13: Low pass filter frequency response solution
given by the platform.
4 CONCLUSIONS
The evolutionary process described in this study also
has applications in the digital area, such as adaptive
filters. The same process for the synthesis of the
filters described is a viable tool for the design of
other filters, such as Butterworth and Chebyshev
filters. The same evolution procedure could be
adopted with continuous genetic algorithms. This is
not the case with the application of the GAOT
package, which uses a binary genetic algorithm. It is
important to point out that these algorithms can be
modeled by a programmer in other programming
languages, or a package from another language, such
as R and Python. The most relevant fact of the
procedure is the fit in the complete process, in which
functions are used to generate considered curves and
ideas and simulators for the observed curve, later
establishing the comparison between the curves and
assigning a representative value to the degree of
similarity. In relation to continuous genetic
algorithms, the concepts of elitism, mutation,
selection and crossover have the same meaning in
relation to those existing for binary algorithms.
However, for a continuous algorithm, the parents are
generated within a limit set by the code. The
crossover generates heirs within the region by the
parents and it is the mutation, in a manner analogous
to its behavior described for binary genetic
algorithms, that will produce solutions outside the
limits established by the parents. The development
steps follow the same method. In the case of
adaptive filters, this technique has the potential to be
applied to purely digital filters, without component
synthesis. An adaptive filter is built on the basis of
an FIR or IIR filter. MATLAB has work tools for
both. There is, in the audio field, a growing market
for the use of artificial intelligence applied to digital
processing. MATLAB has many filter functions that
can be used on this extrinsic platform. Finally, it is
noted that this platform can be used for other
applications in subsequent studies, and that
MATLAB has all the necessary basis for each step
of the described evolutionary process.
The developed project had as main objective the
application in synthesis of electronic circuits used in
the audio area. Through the design of an extrinsic
platform, it was possible to obtain optimal solutions
for known topologies, without considering the
evolution of the topology. As a future work it is
being considered by the authors to include the
evolution of the topology as well. That will need a
reformulation the optimization process due to the
expansion of the search space. All this study was
carried out using the MATLAB software and its
SIMULINK extension, evolving only component
values and comparing the behavior of the transfer
functions obtained for the solution with a target
behavior, generated by mathematical functions of
MATLAB filters. For some circuits, prior
knowledge of the transfer function was necessary for
their design. However, it is emphasized here that this
fact does not create difficulties for the user of the
platform, since it is possible to obtain the transfer
function of any circuit through the joint work tools
of SIMULINK and SIMSCAPE.
Curves close to those idealized were obtained,
with satisfactory efficiency, which demonstrates the
ability of the developed platform for situations of
reasonable engineering complexity. The
combination of MATLAB tools with the
evolutionary concepts of the genetic algorithm
allowed to obtain good solutions for previously
known circuits in relation to their topology. In fact,
the only limitation of this process is that it starts
from a known topology, without evolving it, which
would increase the possibilities of solutions, but
justified by the established configurations in the
market. Finally, it was possible to verify the ability
to search for optimal solutions through evolutionary
electronics for the synthesis of analog circuits, and
also that the proposed evolution technique has other
fields of application.
Audio Circuits Evolution through Genetic Algorithms
519

ACKNOWLEDGEMENTS
This study was supported in part by the
Coordenação de Aperfeiçoamento de Pessoal de
Nível Superior – Brazil (CAPES) – Finance Code
001.
REFERENCES
Mirjalili, S. and Jin-Song, D., 2020. Multi-Objective
Optimization using Artificial Intelligence Techniques.
1st. ed., Warsaw, Poland, Springer.
Coello Coello, C. A., 2013. Multi-objective evolutionary
algorithms in real-world applications: some recent
results and current challenges. Advances in
Evolutionary and Deterministic Methods for Design,
Optimization and Control in Engineering and
Sciences, Vol. 36 of the series Computational Methods
in Applied Sciences pp 3-18.
Coello Coello, C. A., 1999. A comprehensive survey of
evolutionary-based multiobjective optimization
techniques. Knowledge and Information Systems,
Volume 1, Issue 3, pp. 269–308.
Greenwood, G. W., Tyrrel, A. M., 2007. Introduction to
Evolvable Hardware: A Practical Guide for Designing
Self-Adaptive Systems”. IEEE Press Series on
Computational Intelligence. David B. Fogel Series
Editor.
Reorda, M. S, Sterpone, L., Ullah, A., 2017. An Error-
Detection and Self-Repairing Method for Dynamically
and Partially Reconfigurable Systems. IEEE
Transactions on Computers, Volume 66, No. 6.
Sedgewick, R., (1998). Algorithms, 3rd Edition, in C,
Parts 1-4: Fundamentals, Data Structures, Sorting, and
Searching. Reading, MA: Addison-Wesley.
Coelho P., M. do Amaral J. and Bentes M., 2021.
Electronic Circuits Extrinsic Evolutionary Platform. In
Proceedings of the 23rd International Conference on
Enterprise Information Systems - Volume 1: ICEIS,
pp. 752-759.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
520
