
Live Migration of Containers in the Edge
Rohit Das
1
and Subhajit Sidhanta
2
1
Radisys India Pvt. Ltd, Bengaluru, India
2
Dept. of Electrical Eng. and Computer Science, Indian Institute of Technology Bhilai, Raipur, India
Keywords:
Edge Cloud and Fog Computing, Cloud Computing Enabling Technology, Cloud Operations, Cloud Migra-
tion, Cluster Management.
Abstract:
Being comprised of resource-constrained edge devices, live migration is a necessary feature in edge clusters for
migrating the state of an entire machine in case of machine failures and network partitions without disrupting
the continued availability of services. While most of the prior work in this area has provided solutions for
live migration on clusters comprised of resource-rich servers or fog servers with high computing power, there
is a general lack of research on live migration on the low-end ARM devices comprised in edge clusters. To
that end, we propose a lightweight algorithm for performing live migration on resource-constrained edge
clusters. We provide an open-source implementation of the above algorithm for migrating Linux containers.
We demonstrate, using simulations as well as benchmark experiments, that our algorithm outperforms state-
of-the-art live migration algorithms on resource-constrained edge clusters with network partitions and device
failures.
1 INTRODUCTION
In the edge computing paradigm, part or whole of the
computations is performed closer to the source of the
data, i.e. in the edge devices itself, which result in a
drastic reduction of latency by effectively minimizing
the communication delay between the edge devices
and the public cloud while increasing the certainty
of the results meeting the Service Level Agreement
(SLA). Usually most enterprises today run on a hy-
brid cloud, where a model is trained in a public cloud
and passed to a cluster of edge devices that form a pri-
vate cloud, often referred to as fog. The fog performs
some inference tasks based on the above model and
the input from the IoT devices, and sends results back
to the IoT devices which act as actuators that respond
to results.
Mission-critical edge analytical applications have
stringent Service Level Agreement (SLA) guarantees
which enforce that the application processes a given
workloads in near real-time, and is always available.
Achieving the Service Level Agreement (SLA) guar-
antees imposed by the services hosted in a given edge
cluster becomes harder when we consider the fact
that the edge devices are intrinsically mobile in na-
ture, failure-prone, and work with intermittent net-
work connectivity. In that case, the above mecha-
nisms must be able to adapt to conditions like edge
devices leaving and joining the cluster or existing de-
vices changing their location. Some devices will be
overburdened with processes taking up a lot of re-
sources, like applications involving deep-learning or
neural networks, object-recognition from a live video
feed, so uniform distribution of workload among the
cluster of devices is essential. In case of failure of
a device due to network partition, device failure, or
overloading, the container running on the failed de-
vice must be migrated before-hand to a standby de-
vice, and the new device must be up and running with
as little downtime as possible. This mandates as ad-
equately smooth, robust, and lightweight live migra-
tion algorithm to manage device failures in edge clus-
ters with frequent overloading and reconfiguration.
To that end, this paper makes the following contri-
butions:
• It presents LIMOCE - a novel lightweight algo-
rithm to perform a seamless live migration of a
container from one edge device to another one in
an edge cluster with minimal overhead.
• We present the design of an open-source middle-
ware that implements LIMOCE.
• Using simulations as well as benchmark experi-
ments, we demonstrate that LIMOCE can provide
seamless live migration in a resource-constrained
edge cluster as opposed to the state-of-the-art mi-
Das, R. and Sidhanta, S.
Live Migration of Containers in the Edge.
DOI: 10.5220/0011060800003200
In Proceedings of the 12th International Conference on Cloud Computing and Services Science (CLOSER 2022), pages 51-62
ISBN: 978-989-758-570-8; ISSN: 2184-5042
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
51

gration algorithms designed for typical cloud en-
vironments.
2 RELATED WORK
While live migration is deemed an appropriate solu-
tion for systems set up over LAN having bandwidths
in the range of 1-40 Gbps, there are some challenges
in networks with lower bandwidth. The work on VM
hand-off (Ha et al., 2017) focuses mainly on edge
clusters connected over a WAN of bandwidth 5 to
25 Mbps. While (Ha et al., 2017) leverages delta
migration, their approach does not involve resource-
constrained edge clusters.
Redundancy live migration (Govindaraj and Arte-
menko, 2018) is a significant improvement over the
pre-copy, post-copy or the hybrid live migration al-
gorithm by leveraging check-pointing and buffering
mechanisms.
Though the algorithm proposed is network, appli-
cation, or platform agnostic, but it still needs a fixed
and minimum bandwidth to send over the container
copy, and keep downtime to a specified minimum, as
agreed in the Service-Level Agreement (SLA). Also,
with ARM devices having low resources, implement-
ing this algorithm will not feasible.
Live Service Migration (Machen et al., 2018)
proposes migration algorithms for clusters com-
prised of mobile devices which resemble a resource-
constrained edge device closely, but there is mostly
no scaling involved. Also, the Pi cluster will be deal-
ing with faltering and unstable bandwidth, and may
or may not be mobile.
Dynamic Provisioning of resources (Urgaonkar
et al., 2005) for a resource-constrained cluster deals
with situations like flash crowds when a sudden
amount of huge traffic overwhelms the cluster by re-
arranging the topography of the cluster devices to ac-
commodate for the sudden surge.
VM Clusters have been set up to provide cloud
services and maintain Service-Level Agreements
(SLA) (Voorsluys et al., 2009). The test bed clus-
ter had been setup on resources, unlike single-board
Raspberry Pis (RPis). The resource-constrained clus-
ter may often run out of resources or crash, and
the network may be unreliable. Hence the need for
lightweight containers over VMs, which will be eas-
ier on the devices for migration.
(Hajji and Tso, 2016) talks about the performance
of a single-device and clustered Raspberry Pis, having
a master and worker device setup. They mostly fo-
cus on the performance of running Spark and HDFS
on the cluster natively as well in Docker containers.
However, they mostly depend on the robustness of
Spark, while our cluster is intended towards support-
ing most types of computation over runC
1
containers
for ease of robustness and migration. The Glasgow
Pi Cloud is one of the notable experiments on setting
up Cloud servers using single-board ‘toy’ computers
(Tso et al., 2013). The limitation in the experiment,
one that we intend to overcome here is the lack of re-
dundancy to mitigate failure, and lack of research on
container live migration in Raspberry Pis. Linux Con-
tainers (LXC) have yet to implement checkpoints of
network namespaces, which is easily possible using
runC.
3 SOLUTION DESIGN
3.1 System Model
Following the standard three-layered architecture of
edge computing, we consider a cluster of resource-
constrained computing devices comprising of an edge
cluster that runs analytical workloads on data col-
lected from a group of IoT devices with the option
to offload computation to a public cloud. We assume
that the above analytical workloads are run on con-
tainers created using state-of-the-art containerization
technologies to leverage the associated benefits such
as flexibility, ease of deployment, and portability in
terms of dependencies. Regarding the composition of
the edge cluster, we consider a homogeneous
2
cluster
where the devices roughly possess a uniform specifi-
cation. We also assume that an edge cluster is often
prone to intermittent network partitions and commu-
nication failures. The devices are also failure-prone
with chances of frequent crashes and switch off due to
overheating. The workloads that we consider are typ-
ically real-time in nature, i.e., require a low response
time. They do not usually tolerate large delays and
long downtime. The workloads are typically com-
pute and data intensive in nature, i.e., they process a
large volume of data and perform relatively intensive
computations. Lastly, we assume that there are some
devices in the cluster that have higher reliability and
have significantly more computing resources than the
rest of the devices. Experiments have shown that hav-
ing a super-peer with at least 4 GB RAM prevent the
1
Along with CRIU, runC can be used to easily manage,
configure and migrate a container, along with its network
namespace from one host to another.
2
This is a standard assumption made in prior research in
the field of distributed systems in general. But our solution
can theoretically be applied to heterogeneous cluster as well
(Urgaonkar et al., 2005).
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
52
device from crashing due to overload.
The above group of devices are designated as
super-peer devices, while the rest of the devices in the
cluster are referred to as worker devices. Hence an
edge cluster is comprised of a group of super-peers,
referred to as the master cluster, and a worker clus-
ter comprised of the rest of the devices in the edge
cluster. The super-peers maintain a list of live worker
devices and corresponding standby device. A smaller
number of edge devices are designated as standby
super-peers to act as redundant devices for the super-
peers. In case of failures of a live super-peer, it sends
a notification to standby super-peers, which are acti-
vated to take the place of the failed live super-peers.
We assume that leader-election protocols are applied
to elect a new super-peer as soon as possible to reduce
delay and downtime. We assume that the live super-
peers send the state of the container to the standby
super-peers at a regular interval to minimize the delay
while migrating the said container.
3.2 Design Principles
To enable the resource-constrained edge cluster to
handle data and compute-intensive workloads despite
frequent failures, the LIMOCE algorithm supports
live migration of failed devices under the following
design principles. To enable uninterrupted processing
of edge computing workloads, LIMOCE is designed
to perform smooth migration of containers running
on the failed devices during system crashes and net-
work failures while maintaining downtime as low as
possible between detection of failure and subsequent
resumption of the service. We consider resource-
constrained devices where resources include network
bandwidth, and hence the algorithm must be able
to work with lower bandwidth for communication
amongst devices comprised in the cluster. LIMOCE
must be able to enable the cluster to scale up and down
seamlessly, responding appropriately to the dynamic
nature of the workload and network condition.
LIMOCE is comprised of two tasks - failure han-
dling and overload management. As already men-
tioned in Section 3.1, an entire edge cluster will be
segregated into two parts - the master cluster com-
prised of super-peers, and the worker cluster com-
prised on rest of the devices. LIMOCE leverages
the delta migration technique proposed in (Ha et al.,
2017). We improve delta migration by enabling de-
tection of failure of active nodes using the timestamps
of the incremental container state received. When the
active node is alive and running, the timestamps be-
tween consecutive container states received are used
to calculate the average time between receiving each
state. This is then used to detect timeout when con-
tainer data has not been received for a duration ex-
ceeding the average interval. Alongside incremental
state transfer, we demonstrate that the timeout helps
optimize network bandwidth usage, as constant mon-
itoring by the standby node also incurs higher down-
time. Instead of using custom tools to create spe-
cialised containers to migrate, we leverage CRIU
3
and runC to create highly optimised containers using
bare-metal Linux-based tools. This, in turn, makes
our solution inherently lightweight and and able to
deal with resource constrained situations. Further, by
incrementally sending only diff values from the state
from source to target instances, we are able to handle
bandwidth constrained network connections. In the
next section, we discuss how LIMOCE handles de-
vice failures by migrating a failed or crashed active
device to a standby device.
Table 1: List of Parameters used.
Parameters Description
hash_list Hash Table to store state info
like availability and associated
devices in devices to enable
data access in O(1) time.
standby_device_MAC MAC address of the associated
standby device.
last_state Last incremental container
state received from the active
device.
Mem
thresh
Memory usage threshold, set
by the user, usually as a per-
centage of total memory avail-
able.
Disk
thresh
Disk usage threshold, set by the
user, usually as a percentage of
total disk space available.
3.3 Failure Handling
In an edge computing environment, any edge device
may fail due to random crashes, overloading, or en-
vironmental factors such as network failures. With
LIMOCE, each worker device will have an associated
standby device to fall back on in case of device fail-
ure. Following from the delta compressed live mi-
gration approach (Svärd et al., 2011), we apply the
3
Checkpoint/Restore In Userspace (CRIU) is a Linux
software that can freeze a running container (or an indi-
vidual application) and checkpoint its state to disk (Open
Source, 2012).
Live Migration of Containers in the Edge
53
delta compression technique to compress the memory
pages and disk content to transfer during live migra-
tion. Hence, we refer to our approach as delta migra-
tion. Frequent delta migration of data encapsulated
by containers among devices at a regular interval will
prevent data loss and mitigate downtime. Delta mi-
gration not only reduces bandwidth usage but using
a suite of compression algorithms, helps reduce VM
hand-off time, which in turn, reduces the total down-
time as well. According to our algorithm, the mas-
ter cluster, containing the super-peer devices, as well
as the worker cluster, containing the worker devices,
will be having a replication factor of n + k, n being
the cluster size of each type, to maintain redundancy
for mitigating unpredictable failures. Further, each
worker device will be allocated a standby device from
a group of unused devices in the respective cluster.
Container information like current memory and disk
state shall be sent over after every interval of T sec-
onds after the application of delta migration.
Algorithm 1: Device Activation on Worker device.
1: function ACTIVATE_DEVICE(standby_device_MAC)
2: Checks if active device is down
3: while time.now() < last_seen + T + t do
4: last_state ← curr_device_state
5: last_seen ← time.now()
6: sleep (T )
7: end while
8: The Active device has failed
9: send msg(MAC,active_device) to curr_master
10: Standby device takes over
11: restart container from last_state_recvd
12: send container data to the new standby device
13: end function
A super-peer from the master cluster will allocate
a standby device from the pool and the new device
will pick up from where the failed device left off. At
the initial step, the algorithm sends the entire con-
tainer information to the assigned standby device in
an asynchronous manner in the background. Follow-
ing the delta compression approach, the delta differ-
ence between the states of each active device and its
standby counterpart is sent from the former to the lat-
ter in consecutive intervals. That way, the volume of
information is minimized, allowing the edge cluster
to continue processing compute/data-intensive analyt-
ical workloads over an unreliable network with lim-
ited overall bandwidth. To avoid the constant over-
head involved in probing cluster endpoints in a proac-
tive approach of cluster management, we follow a re-
active approach in detecting outages due to network
partition or crash of cluster devices. Each designated
standby device listens for signals from its correspond-
ing active device to determine whether the latter is ac-
tive or not within an assigned timeout interval. When
a standby device does not receive any information
from its counterpart active device after T +t seconds,
t being the failure tolerance interval assigned by the
user, it signals the active master to take over from the
failed active device and marks itself as an active de-
vice.
In algorithm 1, which runs on the standby device,
lines 3-6 are responsible for checking if a respective
active device is down. A timeout is signaled based
on the assigned timeout interval and the timestamp
of the last state received from the active device. If
a timeout does not occur, it simply updates the last
seen timestamp, and the last state received. Once a
timeout occurs, lines 9-12 illustrate the actions taken
by the standby device in informing the current master
device of the failure, and subsequently restoring the
last state received from the active device. If the mas-
ter allocates a new standby device, the active device
sends delta differences of container state to this new
standby device.
Algorithm 2: Device Activation on Master device.
1: function ACTIVATE_DEVICE(standby_device_MAC)
2: Marks respective active device as down
3: active_device ← hash_list [standby_device_MAC]
4: hash_list [active_device].alive = FALSE
5: for devices in hash_list do
6: if hash_list [device].state == "FREE" AND
7: hash_list [device].alive != FALSE then
8: hash_list[standby_device_MAC].state =
"ACTIVE"
9: standby_device_MAC.activate_device (de-
vice)
10: exit
11: end if
12: end for
13: end function
Algorithm 2 deals with how the current master
device will handle the failure of an active device.
When it receives information of device failure from
a standby device, in lines 3-4, it marks the currently
active device as dead. It then proceeds to find a new
free device from the pool of devices available, marks
the reporting standby device as active, and assigns a
free device as the new standby of the newly activated
device (lines 5-9).
For a master device, two devices will be on
standby and will receive delta differences from the
active master. When the active master device fails,
a bully leader election (Garcia-Molina, 1982) will de-
cide the new master device, which will then broadcast
its own MAC address to the worker cluster. A list
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
54

of available devices with their hostname and MAC
address will be maintained at every device. It will
also contain important information on the devices like
their status (dead or alive), if they are an active or
standby device, their corresponding standby or ac-
tive device, etc. When a worker device fails, only
the active master can change the status of that worker
in its record to mark that the device as inactive. It
can choose a new master through leader election and
broadcast the newly elected master device after every
T
0
interval. When a master device fails, the new mas-
ter device will broadcast itself as the new master and
make the changes in its record, thus reducing band-
width usage.
Algorithm 3: Additional device Allocation.
1: function ALLOCATE_DEVICE(active_device_MAC,stats)
2: Checks if stats are above threshold
3: if stats.memory > Mem
thresh.
OR stats.disk_usage
> Disk
thresh.
then
4: active_device = NULL
5: standby_device = NULL
6: for devices in hash_list do
7: if hash_list [device].state == "FREE" AND
8: hash_list [device].state.alive == TRUE then
9: if active_device == NULL then
10: active_device = device
11: end if
12: if standby_device == NULL AND de-
vice != active_device then
13: standby_device = device
14: else
15: print("No free device left!")
16: end if
17: end if
18: end for
19: end if
20: end function
3.4 Overload Management
LIMOCE also supports proactive monitoring of the
edge devices in the cluster to prevent sudden failure
due to overloading. Any under-utilized devices from
the cluster can be removed to optimize resource us-
age. Using YourKit, memory and disk usage can be
monitored on each device. When resource usage is
above a certain threshold, the active device can re-
quest the active master to add more devices to the
cluster to distribute the jobs and prevent overloading.
If two free devices are found in the pool, the master
assigns one as the active device, and the other as a
standby device, and adds them both to the cluster. If
only one free device is found, the device will be as-
signed as an active device and added to the cluster.
An existing standby device may be reassigned to this
active device. If no free device is found, one of the
standby devices will be assigned as an active device,
and a standby device will be reassigned from the clus-
ter.
In algorithm 3, line 3 checks if the resource usage
is surpassing either the memory or disk usage thresh-
old, or both. If so, lines 6-8 look for free devices
through the pool, and then in lines 7-13, an active de-
vice is added first, since that will be responsible for
performing the actual computation. In the next itera-
tion, if another device is found, it is assigned as the
standby device, else the user is informed that there is
no free device left. Similarly, when resource usage
falls below the lower threshold, devices can be unas-
signed to scale down the cluster. Important informa-
tion on the eliminated device will be broadcast to all
workers before taking it out.
4 CORRECTNESS PROOF
Following the formal semantics used in (Mulyadi and
Akkarajitsakul, 2019), we denote our proposed live-
migration algorithm LIMOCE as an undirected, con-
nected graph. The vertices in the graph denote edge
devices and the graph edges represent communication
between devices. We denote the CPU utilization in
each edge device by a variable x:u associated with the
vertex u in the graph corresponding to the edge de-
vice. There is always at least one edge in the graph be-
tween the pair of vertices representing one active de-
vice and its standby counterpart. One edge represents
the communication with the active devices to check
whether they are active or going to fail. The other
edge is created when the delta differences are sent
from the active device to the corresponding standby
device in case of failure of the active device. The
overload management algorithm is executed in every
step at each device in the graph. During the migration
of an edge device, it starts execution in the state im-
mediately before it and yields a different state upon
execution. Optimality of the algorithm implies that if
the sequence of steps is finite then the final step of the
computation yields a fixpoint state, i.e., a state that
remains unchanged upon execution of any (arbitrarily
chosen) migration step.
Our goal is to suggest correctness criteria for for-
mally verifying our proposed live migration algo-
rithm. These correctness criteria guarantee desir-
able algorithm behavior even if very lax assumptions
are made about the behavior of the environment, the
topology of the network, and the states of the edge
devices. In particular, they allow the environment to
Live Migration of Containers in the Edge
55

produce or consume loads at any time in an arbitrary
manner. Moreover, these correctness criteria are not
unduly restrictive, which we demonstrate that our al-
gorithm meets these criteria.
A live migration algorithm is ‘correct’ if the flow
of the algorithm satisfies the following conditions.
State Lag: At each instant, the lag between the states
of each pair of the active devices and its correspond-
ing standby device is bounded by a fixed state lag ∆,
which is a function of the value of the application
variables plus the metadata. Load: At each instant,
the CPU utilization in each device in the cluster is
bounded by a pre-defined threshold. Convergence: At
the end of each migration step, all devices in the clus-
ter are in ‘sync’, i.e., all variables and metadata are in
a matching state.
Starting from any state, algorithm execution is
guaranteed to terminate in a finite number of steps in a
state where the states of an active device and its desig-
nated standby are identical. The assignment statement
last_state ← curr_device_state (1)
iteratively assigns the state of the active device to
a counterpart standby device. Each time the above
states are synchronized a timestamp are updated as
last_seen ← time.now() (2)
Hence eventually, the while condition
time.now() < last_seen + T +t (3)
evaluates to true resulting in the algorithm to exit the
while loop. The core efficacy of live migration in-
volves successfully sending the latest state of one ac-
tive device to its standby counterpart. Hence we look
at the termination condition for executing the while
loop in lines 3-7 in Algorithm 1. Since eventually the
condition
time.now() < last
seen
+ T + td (4)
evaluates to false, subsequent Lines 9-12 are exe-
cuted, which results the state of the standby device
to match that of the corresponding active device af-
ter execution of the algorithm. Hence, conditions on
State Lag, Load, and Converge hold simultaneously,
and hence correctness of the algorithm is proved.
5 IMPLEMENTATION
To deal with the possibility of device outage and low-
bandwidth and/or faulty network prevalent in edge
clusters, the network model has been set up to min-
imize and optimize communication as much as pos-
sible. Since the robustness of the cluster largely de-
pends on successful checkpoint transfer and restora-
tion on the target device, our middle-ware implements
an automated check-pointing mechanism to support
seamless migration of edge devices.
5.1 Architecture
By design, our algorithm addresses live migration of
containers in clusters comprised of low-power single-
board computers, e.g. Raspberry Pis. For this pa-
per, we have considered a cluster of Raspberry Pi 4,
which consists of a quad-core processor, 2 - 8 GB
RAM, with support for both 2.4 and 5 GHz wireless
with at least 15 W of power for feasible operations
(Raspberry Pi Foundation, 2019). Each device will be
running a variant of Linux, i.e. Ubuntu or Raspbian.
From our initial proof of concept experiments with a
cluster of Pis, we observed that 4 GB RAM is the min-
imum requirement in each Pi to allow for sufficient
memory to run analytical workloads. Each device can
be powered either with a compatible charger as per the
specifications of the Pis or over Power-over-Ethernet
(PoE). In the cluster, during initial setup, one device is
designated as the super-peer, which is responsible for
setting up active and standby devices from the device
pool available. The number of active devices and their
corresponding standby devices can be accepted from
users as command-line arguments to the super-peer.
For the purpose of security, key pairs are generated
on each device, and public keys are shared across the
entire cluster by the super-peer for maintaining inter-
device communication during cluster reconfiguration.
5.2 Network Model
For the purpose of this paper, we are assuming that the
network would be failure-prone and the bandwidth is
limited, i.e., typically varying between 5 - 50 Mbps.
We also assume that the devices will mostly be con-
nected over a wireless connection for easier and faster
setup, better mobility, serviceability, and scalability.
The super-peer will initially broadcast an initial-
ization command to designate the rest of the de-
vices as active or standby, i.e., assign some devices
as standby to each active device. Consecutively,
the standby devices will receive delta differences as
heartbeat messages sent from active devices, and keep
track of whether the respective device is alive or inac-
tive, and will inform the super-peer in case of any fail-
ure based on a timeout. One active device can be con-
nected to multiple standby devices to maintain redun-
dancy to deal with failures, and each standby device
may receive heartbeat messages from multiple active
devices to migrate the containers being used. The
timeout for the migration is calculated from the times-
tamps of the last heartbeat received from active de-
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
56

vices to conserve bandwidth and prevent unnecessary
traffic. When an active device goes down, the super-
peer parses the heartbeat from all the standby devices
attached to it and picks the first reporting standby as
the new active device.
5.3 Migration Model
Containers and virtual machines (VMs) are widely
used these days to encapsulate a computational unit
for flexibility, ease of deployment, and smooth main-
tenance. Containers hold the edge over VMs being
the smaller unit that packages an application along
with its dependencies. Following the above trend,
LIMOCE performs migration of an application pack-
aged in a container, as opposed to VMs, which are
resource-intensive and result in more downtime while
migration, as depicted by the result of a comparison
on the basis of the usage of bandwidth and RAM dur-
ing migration in (Machen et al., 2018).
It cannot be used directly by the user but exposes
an API that is currently utilized by standard container
management tools to facilitate checkpoint and restore.
For CRIU to work properly, some features of the
Linux kernel must be set, and the kernel needs to be
recompiled. The list of key features of CRIU can be
found on the CRIU website.
The initial choice for containers was Linux Con-
tainers (LXC) (Canonical Ltd., 2008). LXC is a
CLI (command-line interface) tool that is widely used
given the ease of managing and handling containers
with it. The containers are a true encapsulation of a
Linux-based system, and they support checkpointing
and migration of a running container. However, since
the containers are running on devices in an edge clus-
ter, the lack of check-pointing facilities for network
namespaces makes it unsuited for our purpose.
Another popular CLI tool for managing containers
is runC. runC provides a more granular level of con-
trol over the container, such as configuring the startup
scripts and processes, setting up network namespaces,
and much more. However, runC also has a steeper
learning curve compared to LXC. It is not exactly an
encapsulation of an entire Linux-based system, but
more application-specific. If the underlying comput-
ing process needs to be changed, so does the configu-
ration and initial setup.
The advantage runC has over LXC, is that it sup-
ports checkpointing for network namespaces, and as
a result, containers can be seamlessly migrated be-
tween devices. It generates a checkpoint folder, which
the user can send to the destination device using file-
transfer tools like rsync, which has support for incre-
mental data transfer. The container can then be re-
stored in the target device, and processes resume. For
ease of setup, runC containers can be configured us-
ing docker images of applications, either pre-existing
or user-defined, by simply exporting them. A net-
work namespace is needed to be created for each runC
container to be able to connect to the network using
the host network namespace. When a container will
be migrated, the network namespace will also be mi-
grated to restore connection and computations on the
destination device. That way, even if the address of
the active host changes, the super-peer can keep track
of it and the container network remains preserved.
6 EVALUATION USING
SIMULATION
First, we evaluate our migration algorithm using sim-
ulation, where we construct different edge computing
scenarios comprising standard edge topology using
and the algorithm is implemented using a simulation
tool.
6.1 Experimental Setup
The above algorithms were implemented using the
widely used Mininet simulation framework. The
Mininet scripts were run on Mininet VMs on an edge
cluster topology constructed using the Python-based
API exposed by the popular open-source software-
defined networks - OpenFlow SDN.
Network Topography: We set up a simple single-
switch network of 10 hosts, with one controller and
one switch using OpenFlow. We assigned one host as
the master device, 5 as active devices, 3 as standby
devices monitoring the active devices, and 1 as a free
device. Overall, for each active device in the cluster,
we assign two standby devices that maintain replicas
of states of the active device.
Device Management: A server script (Mininet
script) ran on all the standby devices on IP 0.0.0.0.
This is the server where the active devices would send
the current state of the computation. On the active
device, another script incremented a number (can be
passed as an argument by the user) and wrote it to a
file to simulate a simple computation. Another script
is used to send the file to the standby device using
rsync (which needs keys to be exchanged to work) for
simulating the transfer of delta differences between
states, and also send the hostname and a text to the
server running on the standby. Rsync has an option
that can be used to send incremental delta differences,
suited to our purpose.
Live Migration of Containers in the Edge
57

On the standby device, we use a script to check for
entries sent by an allotted active device to the server,
and notify when the active device has not responded
within a certain time period (determined by the user)
and caused a timeout. This was extended further to
inform the master device about the dead active de-
vice. The idea was to keep a list of active devices in
a file on the standby device, and vice versa on the ac-
tive device. The entries would include the hostname
and private IP of the devices since they are all in the
same network. Similarly, on the master device, active,
standby, and another list of devices would be man-
aged in files.
Each active device will perform its computation
(simple incremental addition) and report its status
with the current timestamp. Its corresponding standby
devices will monitor its status, and when the active
device has not reported its status in a long time, a fail-
ure is reported to the master device. The master de-
vice then stops all threads corresponding to the failed
active device, assigns the first standby device that re-
ported the failure as the newly active device, stops
monitoring threads run by it previously, and reassigns
standby devices to all the active devices out of the ex-
isting ones.
Python API Implementation: We use Python-based
API exposed by Mininet to implement different varia-
tions in the control flow in an edge cluster to simulate
different scenarios for live migration. Since Mininet
does not create hosts as a separate process, with its re-
source constraints, a custom Python code is developed
to allot a thread to each host for simulating various
actions, such as performing a computation, announc-
ing its live status, reporting failure, etc. There is a
master thread that monitors the whole cluster, active
threads for active devices, standby threads for standby
devices, and a printer thread to print out the current
status of each device. A global Python dict is main-
tained, containing the status, action, associated de-
vices for each device in the cluster, and queues having
alive, dead, free devices in them for easier allocation
and access.
We also implemented various functions of the
master device in the simulation code. The master de-
vice can detect failure from its requests, select the
failed active device, mark it as dead, select the first
standby device that reported the failure, remove it as
standby and mark it as the new active device. The
master thread was not able to wait for the active
threads to stop since it was not the parent thread. The
changes in host data is printed on a separate terminal
for better debugging.
We used threads instead of processes, since pro-
cesses don’t share data among themselves, but make
their own separate copy and work on it. Each thread
now had its flag, which indicated if a thread was run-
ning, and could be used to stop the thread as well.
The master thread was able to handle multiple device
failures now. A separate thread to consistently print
the status of all hosts had been created, which wrote
the status to a file, and a bash script showed the latest
updated lines.
6.2 Evaluation Methodology
The active devices, along with their hostname, IP, and
current state, also reported the current timestamp to
their respective standby devices. Any form of com-
munication between any of the devices had a times-
tamp attached to it, which is logged locally in the
devices. These timestamps have been used to calcu-
late the time between each communication from the
active device to the corresponding standby device(s),
which is used to calculate the timeout on the standby
device(s) as well. The difference between the times-
tamp when a failure of an active device is reported,
and when a standby resumes the computation from
the last state received has been used to calculate the
downtime during a random device failure. Since the
timestamps are recorded at the granularity of each
communication, the duration of operations like how
long it takes for the master device to find a free device
and allot it as the new standby, or how long it takes for
the standby device to resume operation could also be
obtained and observed for further improvement and
optimization.
6.3 Simulation Results
We have implemented two variants of the device al-
location algorithm (refer to Algorithm 3), and have
done a comparative evaluation of them. One variant
exactly matches Algorithm 3, while the other one was
assigned a dedicated standby device to each active de-
vice. In the latter variant, each standby device regu-
larly checks with its corresponding active device to
determine if it is alive. However, this approach has
the following pitfall. The standby devices transmit
broadcast messages to probe the active devices, which
results in overhead exceeding 7 seconds in case of
loss of response. The above overhead comprises the
timeout interval for the broadcast and the delay in de-
tection of outage of an active device from a respec-
tive standby device. On the other hand, the overhead
with the former approach is the interval between the
exchange of broadcast messages from active devices
notifying consecutive changes in the status.
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
58
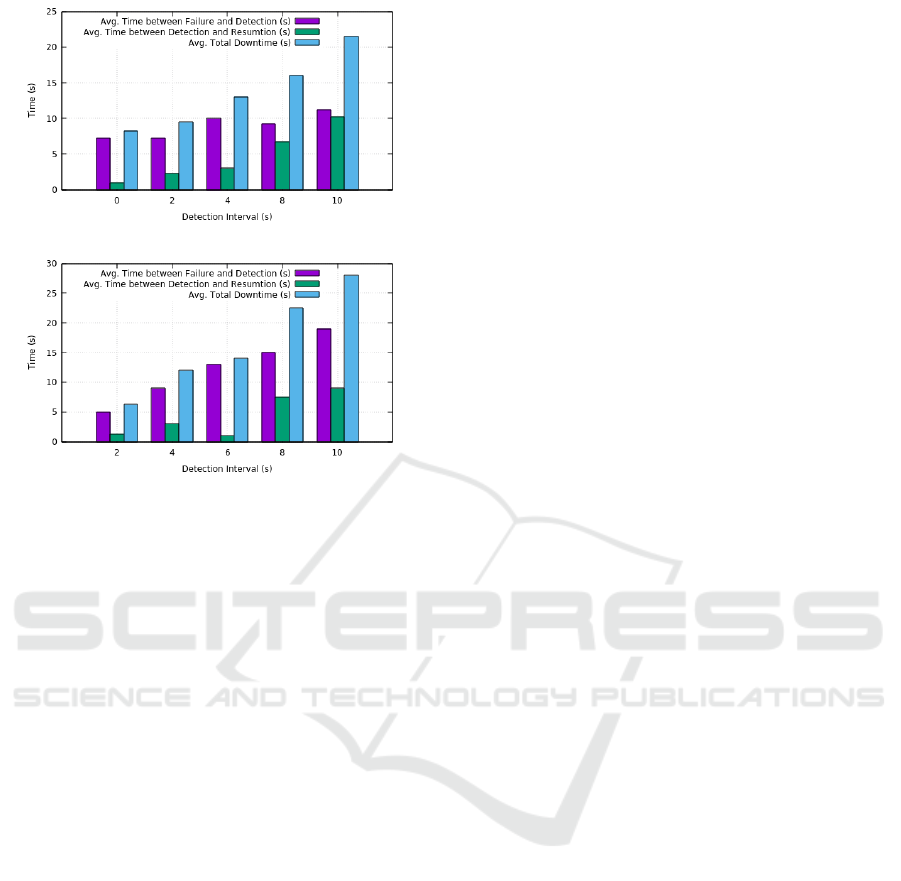
(a)
(b)
Figure 1: Detection interval against avg. time between fail-
ure, detection ,and resumption, and total downtime for (a)
standby devices ping active devices, and (b) active devices
announce their live status.
(Ha et al., 2017) illustrates the reduction in VM
Handoff time, and consequently, the resultant de-
crease in downtime, using Delta Migration (Ha et al.,
2017). The graphs in Figure 1 demonstrate how
downtime changes with respect to change in intervals
between consecutive live device detection runs. From
close inspection of the figure, we conclude that the
second approach performs better.
7 EVALUATION USING
BENCH- MARKING
EXPERIMENTS
In the benchmarking experiments, we follow the eval-
uation strategy of prior researchers (Ha et al., 2017)
to run synthetic benchmark workloads on a cluster
of edge devices emulated by resource-constrained vir-
tual machines from the public cloud.
7.1 Experimental Setup
To benchmark our proposed migration algorithm in a
real-world edge computing scenario, synthetic bench-
mark workloads generated by YCSB (Yahoo Cloud
Serving Benchmark) (Cooper et al., 2010) are exe-
cuted on a cluster of nodes comprised of resource-
constrained edge devices has been emulated using vir-
tual machines provided by Amazon Web Services.
Each of the host devices are comprised of EC2 (Elas-
tic Compute Cloud) instances of type A1.large in-
stances comprised of 4 GB of RAM and AWS Gravi-
ton processors comprising two 64 bit Arm Neoverse
cores running Ubuntu 18.04 as the host OS. All the
instances are located in the North Virginia (us-east-
1) location. For enabling seamless operation of the
Checkpoint/Restore-In-Userspace (CRIU) tool used
in our implementation, we have loaded the instances
with the Linux kernel version 5.10, with relevant con-
figuration options turned on to enable checkpoint-
based dumping of process states and network names-
paces.
The CLI (Command Line Interface) tool runC has
been installed on all the EC2 instances for spawning
and running our containers. To emulate real-life edge
workloads, YCSB will be run on the instances for
generating synthetic workload patterns, with a Mon-
goDB server hosted on one of the instances for pro-
cessing the above workload. The YCSB client accepts
arguments from the console and generates a series of
synthetic workloads, comprised of a combination of
read/write/update statements, which are executed on
the MongoDB backend.
One of the challenges with using the tools runC
and CRIU for migration is making sure that the un-
derlying Linux-based kernel of the host is configured
and pre-compiled to support check-pointing. Though
container managers like LXC and Docker are openly
available, LXC does not support network check-
points, and Docker is not suitable for our purpose due
to the experimental state of its check-pointing fea-
tures. However, the latter can be used to set up the file
system for our desired container with all libraries pre-
installed. Since runC is a bare-metal container run-
time, most of the libraries and networking support do
not come pre-installed, but it also allows a lot of fine-
grained control over various aspects of the container.
Additionally, to enable communication with ex-
ternal networks, we add routing rules to allow the in-
stances to connect to the default interface eth0 (in this
case) or any other interface configured. Both incom-
ing and outgoing packets need to be forwarded to and
from the newly created network namespace to the ex-
ternal network via eth0. Since the YCSB client pro-
cesses only outgoing connections to the underlying
MongoDB server, we do not need to add a rule for
allowing connections to the MongoDB port. Lastly.
we add the path to this new namespace in the con-
fig.json file of the corresponding runC container to
enable communication.
Live Migration of Containers in the Edge
59

7.1.1 Running the YCSB Benchmark
The YCSB client is executed on a runC container
loaded on a separate active node. The network names-
pace is configured as described earlier. The client ex-
ecutes workloads A through F according to the alpha-
betical order of the name of the workload type.
Each active node will be associated with a standby
node, which will monitor the status of the active node.
An active node will send a packet every 4s to indicate
its status to the corresponding standby node since we
have observed from empirical results collected from
our experiments that this time interval (i.e., 4s) can
result in saturating the network as well as keeping the
downtime low. Check-pointing is done between each
operation of load and run, as well as between exe-
cution of different workloads. Incremental data from
different checkpoints collected on an active node will
be transferred to the corresponding standby node as
well. When an active node goes down, its standby
will detect the outage through an observed timeout,
and restore the container from the latest checkpoint
received, and inform the master node as well. For this
paper, we assume only soft crashes in case of fail-
ures such that some failure resolution tasks can be
performed before the active node completely dies and
the container is migrated to a standby node. In case
of a hard crash, the standby node will have to restart
from an older checkpoint, and the requests may not
be processed in real-time. Also, rsync may be used to
be transfer files in an asynchronous manner, and live
status may be sent to the standby node as a separate
service.
7.2 Analysis of Benchmarking Results
The benchmarking experiments on the AWS instances
were done following the second approach outlined in
Section 6.3, where the active nodes send their data to
the standby nodes, and the latter node is assigned the
responsibility to indicate whether the former is alive.
The tool rsync was used to transfer files over the net-
work as its design closely follows that of the delta
transfer technique which we follow. While the initial
stage of the transfer takes a considerably large time,
transfer times of subsequent files are not arbitrarily
high. However, to enable rsync file transfer key ex-
change among all the devices is performed since the
algorithm does not assign a fixed device as a master
or standby, or active. The downtime observed with
varying time intervals of data transfer of 2s, 4s, etc.,
were similar to the results obtained with Mininet sim-
ulation illustrated in Figures 1a and 1b, albeit taking
a bit more time due to a real-life network and devices
in the cluster.
Figure 2: Runtime (in seconds) for the entire workload in
various migration scenarios.
Figure 2 illustrates the overall runtime observed
with the given YCSB workload sequence for both
with and without migration. The bar labeled "No Mi-
gration" corresponds to the observation without our
proposed algorithm which acts as a control against
which we compare the results with migration imple-
mented. As is evident from the graph, with migration,
the observed runtimes after workloads A, C, and E are
almost comparable with the runtimes observed with-
out migration. Workload E experiences the maximum
runtime due to the nature of workload E since it is
more resource-intensive than the others.
Figures 4a and 4b depict the variations in observed
runtime and throughput for each workload type with
and without migration. For Figure 4a, as explained
before, workload E uses the maximum resources, and
hence the runtime exceeds that observed with the
other workload types in all cases. In Figure 3, the
time-series variation of throughput for each type of
workload is depicted. As can be seen from the results
presented, all the migration scenario data closely fol-
low the observations without migration given by the
solid line. In all the results illustrated here, we can
notice a significant drop in throughput or a sharp in-
crease in runtime whenever migration is being per-
formed. Each migration is performed between a load
and run operation for each workload, keeping in con-
sideration how YCSB workloads connect to the Mon-
goDB server and run the workload. However, the drop
in performance is marginal compared to the over-
all picture presented here. We can safely say that
even with migration, the performance and overall run-
times of the workloads, as well as the sequence of
workloads, remain the same as in a no-migration sce-
nario. This also shows the feasibility of resource-
constrained edge clusters in that, even with nodes
prone to failure, highly intensive computations can be
performed with relative ease and reliability.
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
60

(a) (b) (c)
(d) (e) (f)
Figure 3: Throughput variation against time for each type of workload.
(a)
(b)
Figure 4: Comparison for (a) runtime (in seconds), and (b)
throughput (ops/sec) for various YCSB workloads in vari-
ous scenarios.
8 CONCLUSION
We have presented a novel algorithm for live mi-
gration in network failure-prone clusters compris-
ing resource-constrained edge devices and an open-
source implementation of the same.
ACKNOWLEDGEMENTS
This research has received funding under the NetApp
Faculty Fellowship scheme from NetApp Inc.
REFERENCES
Canonical Ltd. (2008). Linux Containers. https://
linuxcontainers.org.
Cooper, B. F., Silberstein, A., Tam, E., Ramakrishnan, R.,
and Sears, R. (2010). Benchmarking cloud serving
systems with ycsb. In Proceedings of the 1st ACM
symposium on Cloud computing, pages 143–154.
Garcia-Molina, H. (1982). Elections in a distributed com-
puting system. IEEE Computer Architecture Letters,
31(01):48–59.
Govindaraj, K. and Artemenko, A. (2018). Container Live
Migration for Latency Critical Industrial Applications
on Edge Computing. In 2018 IEEE 23rd International
Conference on Emerging Technologies and Factory
Automation (ETFA), volume 1, pages 83–90.
Ha, K., Abe, Y., Eiszler, T., Chen, Z., Hu, W., Amos, B.,
Upadhyaya, R., Pillai, P., and Satyanarayanan, M.
(2017). You Can Teach Elephants to Dance: Agile
VM Handoff for Edge Computing. In Proceedings
of the Second ACM/IEEE Symposium on Edge Com-
puting, SEC ’17, New York, NY, USA. Association
Live Migration of Containers in the Edge
61

for Computing Machinery. https://doi.org/10.1145/
3132211.3134453.
Hajji, W. and Tso, P. (2016). Understanding the perfor-
mance of low power raspberry pi cloud for big data.
Electronics, 5:29.
Machen, A., Wang, S., Leung, K. K., Ko, B. J., and Saloni-
dis, T. (2018). Live Service Migration in Mobile Edge
Clouds. IEEE Wireless Communications, 25(1):140–
147.
Mulyadi, F. and Akkarajitsakul, K. (2019). Non-
Cooperative and Cooperative Game Approaches
for Load Balancing in Distributed Systems, page
252–257. Association for Computing Machinery,
New York, NY, USA.
Open Source (2012). Checkpoint Restore in Userspace.
https://www.criu.org/Main_Page.
Raspberry Pi Foundation (2019). Raspberry Pi 4
Tech Specs. https://www.raspberrypi.org/products/
raspberry-pi-4-model-b/specifications/.
Svärd, P., Hudzia, B., Tordsson, J., and Elmroth, E. (2011).
Evaluation of delta compression techniques for effi-
cient live migration of large virtual machines. In Pro-
ceedings of the 7th ACM SIGPLAN/SIGOPS interna-
tional conference on Virtual execution environments,
pages 111–120.
Tso, F. P., White, D. R., Jouet, S., Singer, J., and Pezaros,
D. P. (2013). The glasgow raspberry pi cloud: A scale
model for cloud computing infrastructures. In 2013
IEEE 33rd International Conference on Distributed
Computing Systems Workshops, pages 108–112.
Urgaonkar, B., Shenoy, P., Chandra, A., and Goyal, P.
(2005). Dynamic Provisioning of Multi-tier Internet
Applications. In Second International Conference on
Autonomic Computing (ICAC’05), pages 217–228.
Voorsluys, W., Broberg, J., Venugopal, S., and Buyya, R.
(2009). Cost of virtual machine live migration in
clouds: A performance evaluation. In Jaatun, M. G.,
Zhao, G., and Rong, C., editors, Cloud Computing,
pages 254–265, Berlin, Heidelberg. Springer Berlin
Heidelberg.
CLOSER 2022 - 12th International Conference on Cloud Computing and Services Science
62
