
A Concept for Collaborative Incident Validation in a Self-organised
Traffic Management System
Sven Tomforde
a
and Ingo Thomsen
b
Intelligent Systems, Christian-Albrechts-Universit
¨
at zu Kiel, 24118 Kiel, Germany
Keywords:
Traffic Management, Organic Traffic Control, Traffic Flow Analysis, Traffic Incident Detection, Validation.
Abstract:
The strong and, in part, further increasing traffic volumes of individual and heavy goods traffic in urban
regions lead to a utilisation of the networks close to or above the capacity limit, especially during rush hours.
Traffic light control is ideally traffic-dependent, which can be realised either centralised or distributed as a
self-organised approach. However, these systems are typically not able to detect disruptions or incidents (such
as accidents, road works, etc.) and take them into account in the control logic. A key problem here is that
either there is no incident detection in place or it is not reliable enough. In this paper, we discuss the need for
collaborative validation of locally detected incidents in a self-organised traffic control system. We show that
this can increase the reliability of detection to the point where incident-dependent switching becomes possible.
1 INTRODUCTION
The constant growth of individual and freight traffic
is causing delays and congestion worldwide, espe-
cially in urban areas (Schrank et al., 2019), even if
recent studies showed that travel delays were heavily
reduced from 2019 to 2020 due to the COVID lock-
downs (Schrank et al., 2021). Since infrastructure ex-
pansion is typically not an option, a more intelligent
and efficient traffic management is pivotal. In the lit-
erature, different approaches can be found, ranging
from a purely centrally organised, static to hybrid to a
fully distributed (at the level of intersections) optimi-
sation of traffic-dependent clearance times.
Due to the inherent advantages such as problem
locality, scalability, or avoidance of single-point-of-
failure, science has focused mainly on distributed ap-
proaches in the last two decades, partly with more
centralised elements. Such solutions can adapt green
times locally, automatically learn the best adapta-
tion strategy and establish self-organised coordination
with neighbouring intersection controllers (for pro-
gressive signal systems or route guidance). However,
these approaches are still reactive in the sense that
they are focused on measured and estimated traffic
flows – while ignoring the expected developments due
to actual incidents in the underlying network.
a
https://orcid.org/0000-0002-5825-8915
b
https://orcid.org/0000-0002-0850-4786
In preliminary work, we presented an approach to
automated incident detection (AID) in urban road net-
works in contrast to established approaches at high-
ways. Since local detection is fundamentally uncer-
tain, more global knowledge is needed to increase the
reliability. Therefore, the contribution of this paper is
(a) to address the challenges of local incident detec-
tion in urban networks, (b) to outline a collaborative,
self-organised validation of incidents to increase ac-
curacy and (c) to derive a fitting research agenda.
The remainder of this paper is organised as fol-
lows: Section 2 gives an overview of related work by
outlining self-organised traffic control and traffic inci-
dent detection. Section 3 describes our system model
and the Organic Traffic Control system as the basis
for our approach. Section 4 then shows our concept
for collaborative incident validation in self-organised
traffic control systems with the Organic Traffic Con-
trol system as example. Finally, Section 5 summarises
the paper and gives an outlook on future work.
2 BACKGROUND
This section describes the underlying related work
– specifically in the context of self-organised traffic
control and automated incident detection.
316
Tomforde, S. and Thomsen, I.
A Concept for Collaborative Incident Validation in a Self-organised Traffic Management System.
DOI: 10.5220/0011051100003191
In Proceedings of the 8th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2022), pages 316-323
ISBN: 978-989-758-573-9; ISSN: 2184-495X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

2.1 Self-organised Traffic Control
Traffic lights in urban areas are usually operated by
a traffic control centre. The most prominent sys-
tems are SCOOT (Robertson and Bretherton, 1991),
SCATS (Sims and Dobinson, 1980), MOVA (Vin-
cent et al., 1990), and UTOPIA/-SPOT (Mauro and
Taranto, 1990). These systems typically rely on a
centralised control loop that adapts the behaviour of
distributed intersection controller (IC), based on a
given cost function, which may include different as-
pects, like travel times, emissions, or public trans-
port priority. Despite being centralised, these sys-
tems come with at least some self-adaptive and self-
organising (SASO), i.e., being adaptive and policy-
driven. The adaptation mechanism works on top of
a parametrisable system configuration. For classifica-
tion and comparison of approaches, see (Studer et al.,
2015). In addition to these popular approaches, sev-
eral systems focusing on SASO and learning capa-
bilities have been proposed: A multi-agent approach
based on fuzzy control was presented in (Gokulan and
Srinivasan, 2010), distributed W-learning was used to
optimise a phase-oriented signal control in(Dusparic
and Cahill, 2009), and (Oliveira and Camponogara,
2010) used a model with predictive control. As an
alternative to phase-based systems, a fluid-dynamic
model has been discussed in (Helbing et al., 2005)
that uses waiting vehicles as pressure and counter-
pressure for switching traffic lights policies. In con-
trast to the aim of this proposal, these traffic control
systems do not autonomously identify and classify in-
cidents and adapt their signalisation according to de-
tected incidents.
2.2 Traffic Incident Detection
Techniques for automatic recognition of incidents, ac-
cidents, and other road events, e.g. requiring emer-
gency responses, have been the focus of research for
more than three decades. Most of the resulting al-
gorithms rely on data of loop detectors. Chronolog-
ically, AID research started with the Standard Nor-
mal Deviate algorithm (Dudek et al., 1974), subse-
quently followed by the California algorithm fam-
ily (Payne, 1975; Payne and Tignor, 1978). These
techniques are essentially following a simple de-
cision tree structure considering threshold. Sub-
sequently, approaches based on time-series analy-
sis (Ahmed and Cook, 1980), identification of low-
volume conditions (Dudek et al., 1975), filtering and
smoothing-based algorithms (Stephanedes and Chas-
siakos, 1993), a dynamic-systems-model-based al-
gorithm (Willsky et al., 1980), correlation-analysis-
based approaches (Takaba and Matsuno, 1985), the
McMaster catastrophe theory-based algorithm (Gall
and Hall, 1989), and a mathematical traffic-flow-
model-based algorithm (Lin and Daganzo, 1997) have
been presented. More recently, video-based ap-
proaches have been presented (Shehata et al., 2008)
and combined with semantic annotations (Kamijo
et al., 2004). In addition to these infrastructure-based
approaches, probe vehicles have been considered to
estimate traffic flows (Jenelius and Koutsopoulos,
2013); with some work specially dedicated to urban
environments (Feng et al., 2014) – which may serve
the incident detection.
However, these approaches all come with some
limitations: Either they are designed for highways
only or they are based on experienced travel times
through the underlying road network, and/or they do
not distinguish between different incident types (and
the corresponding reaction). Most importantly, there
is no integrated traffic management solution that con-
siders detected incidents, an estimation of their sever-
ity and impact, or takes this information pro-actively
into account when deciding about traffic control or
progressive signal systems, for instance.
In response to these observations, we presented
a novel clustering-based approach for AID in urban
road networks that is based on standard loop detector
technology again (Thomsen et al., 2021). Based on
responsibility zones of ICs (i.e., intersection area and
incoming sections equipped with induction loop sen-
sors), the distributed ICs are considering the time se-
ries of the detector loops and apply techniques such as
DBSCAN (Ester et al., 1996) to detect incidents on-
line in a certain time window. We showed that appro-
priate detection accuracy is given for high load con-
ditions, while the approach still suffers in weak load
conditions. Current work focuses on an improvement
of the approach and subsequent classification of in-
cidents. This should serve as a basis for predicting
properties such as duration and impact of the incident.
3 ORGANIC TRAFFIC CONTROL
Below, we consider collaborative incident detection to
improve the detection accuracy and reliability in dis-
tributed and self-organised traffic control. We present
our system model with the possible incident types and
discuss the Organic Traffic Control System as a basis.
3.1 System Model
We assume urban road networks with varying topol-
ogy and decentralised nodes that are responsible for
A Concept for Collaborative Incident Validation in a Self-organised Traffic Management System
317
controlling the traffic light controllers (TLC) of the
intersection. Each node is responsible for the area
of this controlled intersection as well as the incom-
ing sections – where induction loop sensors are as-
sumed to be available. Further, each node is capable
of detecting traffic incidents in its inbound and out-
bound sections, and it communicates with its neigh-
bours (i.e., other nodes that share a road segment).
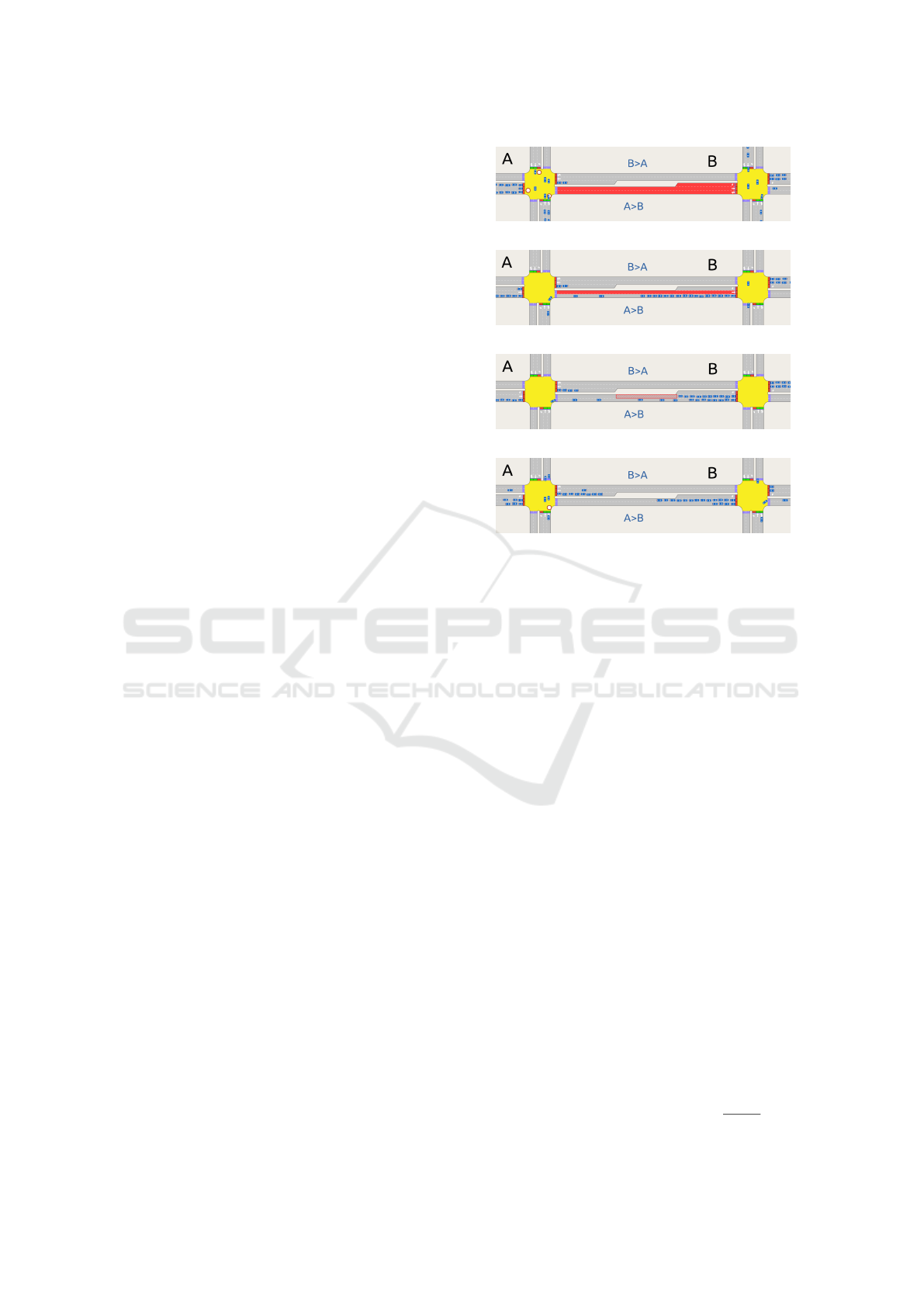
We consider five groups of possible static inci-
dents while dynamic events such as the partial closure
of a lane on a multi-lane section (e.g. heavy goods
traffic) will be addressed future work. The groups are:
• Complete closing of the section between two in-
tersections – called a section closure (Fig. 1a)
• Lane closure in a multi-lane section (Fig. 1b)
• Partial lane closure in multi-lane section (Fig. 1c)
• Closure or limited use of an intersection by block-
ing one or more turnings (Fig. 1d)
• Technical defect at an intersection (e.g. loss of
function of a traffic light or a detector)
At the very least, nodes have to work with the fol-
lowing information: They only know with a certain
probability that there is a possible incident. This in-
formation can also be passed on to their neighbours.
Moreover, the nodes send their data in two scenarios
– direct or with a certain delay.
Based on these model assumptions, the objective
of a collaborative validation scheme is to improve the
incident prediction of the underlying self-organised
traffic control and management system based on de-
centralised communication – or to reduce its false
positive rate. To increase the confidence towards the
own data, a periodic self-diagnosis of each node, the
associated TLC, and detectors is required. The com-
munication is used to specify the nature and origin of
a possible incident and to validate the disturbance by
other traffic signal controllers. All nodes only have
knowledge about their own state (paired with a cer-
tain confidence), while the state is either ‘everything
is okay’ or one of the following levels:
1. The node knows of an incident somewhere.
2. The node knows that there is an incident in an out-
going or incoming section.
3. The node can assign the incident to a specific sec-
tion or junction.
4. The node can assign the incident type to one of
the previous mentioned groups.
3.2 The Basis: Organic Traffic Control
The Organic Traffic Control (OTC) system (Proth-
mann et al., 2009) and its extensions serve as a basis
(a) Section closure
(b) Lane closure
(c) Partial lane closure
(d) Turn closure
Figure 1: Examples of incidents simulated in the Aimsun
Next traffic simulator (Aimsun, 2021) in the road section
from A to B, or in the last case, in intersection A itself,
when cars cannot turn right towards intersection B.
for automatic detection of incidents in urban road net-
works, their self-organised collaborative validation,
and finally their consideration in signalisation strate-
gies at ICs. The OTC system is a self-adaptive and
self-organised traffic control system that decides lo-
cally at each intersection about the behaviour of the
underlying IC. Here, “organic” follows the ideas of
Organic Computing (M
¨
uller-Schloer and Tomforde,
2017) and emphases the transfer of principles from
nature to technical systems: The decentralised struc-
ture, the cooperation of smaller, autonomous entities,
as well as local adaptation and learning capabilities
allow for high robustness, scalability, and flexibility.
Based on the Observer/Controller paradigm (Tom-
forde et al., 2011), the OTC system adapts the green
duration of traffic lights in a phase-based approach
and optimises this adaptation strategy at runtime by
means of reinforcement learning and safety-oriented
generation of novel behaviour within a simulation en-
vironment, see (Prothmann et al., 2009). This adap-
tation process is performed depending on the cur-
rently active cycle time of the traffic controller, i.e.,
an adapted control strategy is active for three cycles
(typically 60 to 120 sec) before it can become sub-
ject to adaptations again. As decision basis for any
adaptations, the current traffic flows for all turning
movements passing the intersection (in
vehicles
hour
and es-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
318
timated from detector readings) are considered. The
estimated waiting times are then used as feedback to
improve the behaviour over time. OTC is further able
to establish progressive signal systems in a fully self-
organised manner (Tomforde et al., 2008) and to pro-
vide route recommendations to drivers which reflect
the current state of the traffic network (Prothmann
et al., 2012). Based on OTC, further contributions in-
vestigated are robust traffic demand prediction (Som-
mer et al., 2013), integration of these predictions in
the control strategies, and infrastructure-based antici-
patory route guidance (Sommer et al., 2016).
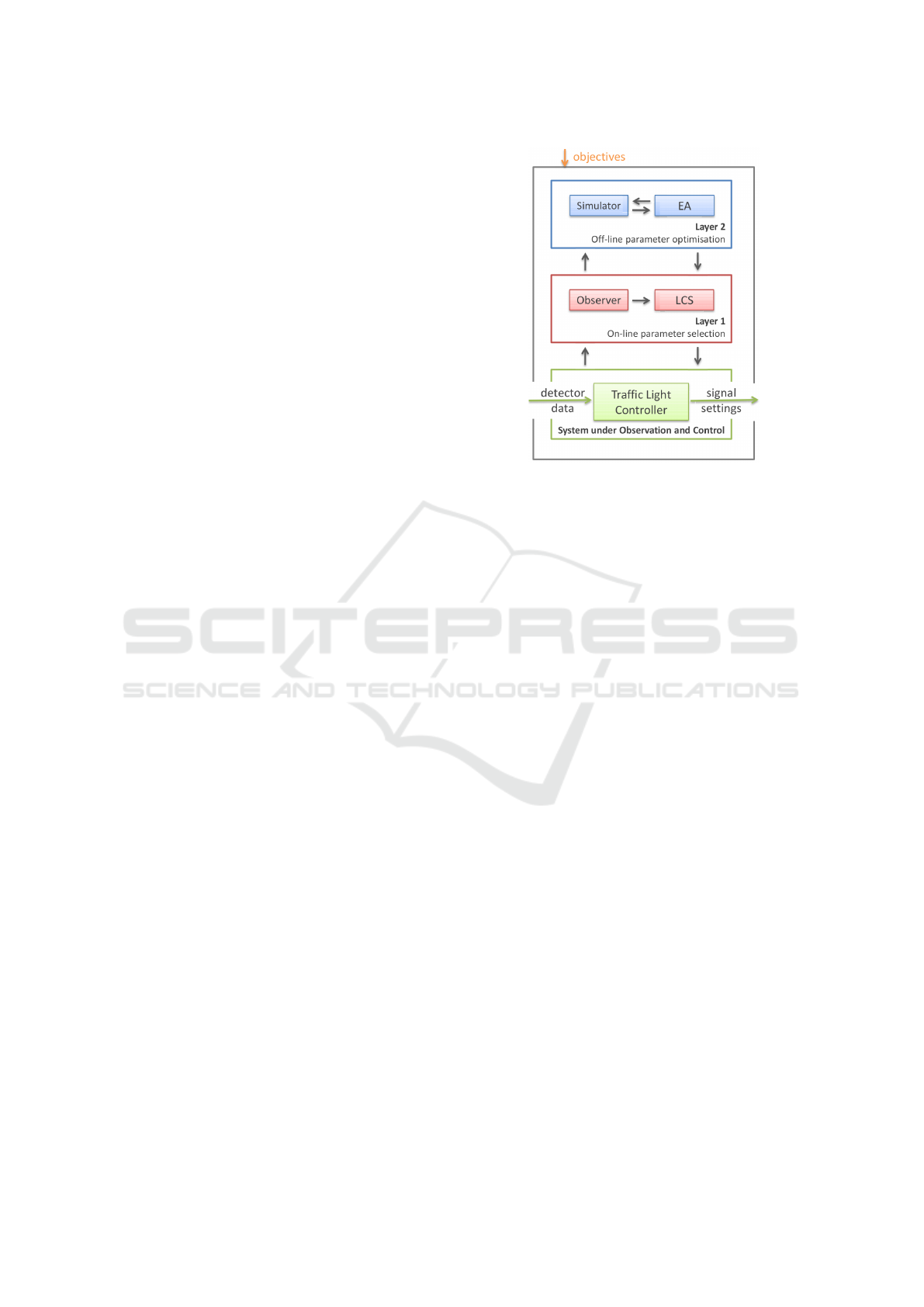
OTC is self-organised in a way that all nodes oper-
ate independently and collaborate to achieve system-
wide goals, such as reduction of waiting times, num-
ber of stops, emissions, etc. Therefore, it establishes
a multi-layered adaptation and learning system on top
of a standard TLC. Figure 2 illustrates the concep-
tual design. Here, Layer 0 represents the System un-
der Observation and Control (SuOC), which is the ac-
tual TLC and the interfaces to detectors and neigh-
bouring nodes. This TLC (i.e., its green duration)
is re-configurable at runtime, which is done by the
layer above. Consequently, Layer 1 adapts dynami-
cally to the state of the environment (assessed using
the sensors) and its controller which uses a Learn-
ing Classifier System (LCS, here a variant of Wilson’s
XCS (Wilson, 1995)). This LCS chooses rules from
a rule set to modify the traffic signalisation appropri-
ately at runtime. Finally, Layer 2 is activated when
Layer 1 is confronted with an environment for which
it has no suitable rule or only inappropriate knowl-
edge. In this case, a traffic simulation software (Aim-
sun Next, see (Aimsun, 2021)) is used to validate new
rules which are generated using an evolutionary algo-
rithm.
4 COLLABORATIVE,
SELF-ORGANISED INCIDENT
VALIDATION
Based on the OTC approach and the presented system
model – including the incident detection approach
from (Thomsen et al., 2021) – this section derives
the challenges for establishing a collaborative inci-
dent validation procedure. This outlines a research
agenda in addition to the basic concept.
Traffic conditions as observed by detectors are the
result of vehicles traversing the network. In conse-
quence, the patterns observed at consecutive detec-
tor stations are not independent. Individual vehicles
may temporarily be delayed due to parking (includ-
Figure 2: Overview of the multilevel OTC architecture.
ing long-term stays in parking lots) – but they do not
completely appear or disappear. This also implies that
the observed traffic conditions are strongly related to
those of the preceding detector station a short period
before. We consequently, aim at utilising this infor-
mation to (i) further decrease the false alarm rate and
(ii) detect disturbed sensors.
The goal of the collaborative self-organised inci-
dent validation approach is to turn a self-adaptive in-
cident detection system (here: The OTC-based ap-
proach from (Thomsen et al., 2021)) into a cooper-
ative solution. This initially implies using the knowl-
edge of preceding and succeeding ICs for the valida-
tion purposes of incident notifications (Challenge 1).
Afterwards, we require novel techniques for assessing
the observation success of detector stations based on
the same information (Challenge 2). Finally, we need
to explore how ICs can learn the accuracy and impact
of the detection success of their neighbours using a re-
inforcement approach (Challenge 3). This will be the
basis for the actual response to alarms in OTC (and
which must be learned, not just communicated since
the impact are not visible for the neighbour).
Our starting point is preliminary work for estab-
lishing PSS (Tomforde et al., 2008). Here, informa-
tion exchange protocols based on communication and
processing techniques to consider the knowledge of
other ICs have been developed. We need to adapt
the communication protocols and develop novel tech-
niques to make use of sensor information and classi-
fication knowledge from neighbouring ICs.
A Concept for Collaborative Incident Validation in a Self-organised Traffic Management System
319

Challenge 1: Collaborative Validation of
Stream-based Incident Classifications
To begin with, the existing unicast-based communica-
tion protocols in OTC have to be enabled to exchange
information about traffic volumes running over shared
roads and the underlying aggregated detector signals.
Based on these communication capabilities, we pro-
pose to investigate a pull-based mechanism where ICs
can ask their neighbours about observations and clas-
sifications of traffic behaviour. Here, we distinguish
two cases: an event-driven approach (e.g., in case of
abnormal traffic behaviour or if incidents have been
signalised) and a self-testing loop (i.e., in cycles to
verify the correct functioning of a particular sensor).
For the event-driven approach, the IC has to iden-
tify the relevant neighbour with respect to the detec-
tor location (upstream or downstream). Taking the
estimated travel time (i.e., following the approach in
(Prothmann et al., 2012) based on Webster’s formula
(Webster, 1959)) to/from this intersection controller
into account, the patterns of traffic flow can be com-
pared with the neighbour’s information. If the com-
parisons show a correlation of effects, the incident
alarm is confirmed. Otherwise, it should be delayed –
and an additional validation step has to be done in the
other direction of the traffic stream. We further have
to investigate which features can be used in addition
to the traffic volume to improve the validation effect
(e.g., slope, curvature, and variability of the data).
In turn, the self-testing approach aims at assessing
the behaviour of the own sensors. Therefore, the traf-
fic behaviour of all road segments approaching a de-
tector station of a turning, the corresponding detector
data, the detector data of the road segment taking up
the turning’s traffic stream, and the information of the
IC where this road segment leads must be evaluated.
In general, the smoothed and averaged traffic volumes
of all three involved intersections have to account for
to the same level. Based on a comparison of these
figures, deviations can be detected – and they can be
related to an individual source of information (i.e., a
detector station or a neighbour). As a result, either a
neighbour can be triggered that the received informa-
tion is conspicuous or the impact of the disturbance
of the own detector is analysed in detail (i.e., repeat-
ing this analysis based on historical data backwards in
time until deviations are no longer significant).
Challenge 2: Collaborative
Self-assessment
The concept of the previous Challenge 1 is based on a
bilateral comparison of detector data and aggregated
traffic flow estimations. In this Challenge 2, we in-
crease the focus towards a network-wide collective
self-assessment of incident information and detector
plausibility. Therefore, we need to further investigate
if and how the validation effect can be improved by
considering longer streams than just pairs of ICs. This
implies higher uncertainty due to detector-inherent
differences and traffic splitting into lanes at each in-
tersection (or between lanes on road segments), but it
also allows to follow traffic streams for sequences of
detector stations. As a result, we aim at estimating the
expected traffic volume and use this as ground truth
for computing how the individual detector deviates
from the expected stream. This approach has its ad-
vantages in cases where, e.g., two consecutive detec-
tor stations are disturbed simultaneously. In general,
we have to estimate a time series of detector readings
where the travel times between detector stations refer
to the time steps of the time series. We propose to ap-
proximate the time series linearly and use this infor-
mation to detect outliers. This process can be further
improved by considering more features than just the
traffic volumes.
However, the effort of such an approach is dra-
matically higher than the bilateral approach of Chal-
lenge 1: All-to-all communication between several
ICs burdens the underlying communication network.
In order to (i) keep the effort at a feasible level and
(ii) narrow the overall traffic stream estimation prob-
lem down to a certain part of the network, we pro-
pose to follow an event-based approach again: All in-
cident alarms that cannot be validated by the corre-
sponding neighbour serve as an event to start the dis-
tributed mechanism. Consequently, a responsible IC
is available to manage the process. The mechanism
itself runs conceptually in iterations: We propose to
increase the horizon hop-wise in both directions in
each iteration. This can then be augmented by a sub-
sequent outlier detection approach as outlined above
to identify incorrect detector information or to finally
explain the deviations by normal variations from the
underlying stream information (e.g., if the stream is
characterised by highly heterogeneous readings).
Challenge 3: Reinforced Reliability
Estimation of Neighbouring Intersection
Controllers
The approach as outlined by the previous two chal-
lenges means that ICs notify their neighbours of de-
tected incidents by starting the distributed validation
process (both, the bilateral and the multilateral vari-
ant). In Challenge 4, we propose to develop tech-
niques to take this information into account when de-
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
320

ciding about adapting the current control strategies.
However, such a reaction is only successful if the un-
derlying information is quickly available and highly
reliable. The reliability is affected by characteristics
that do not depend on the incident detection tech-
niques. For instance, different aspects such as the
topology of the intersection, parking areas between
intersections, or large taxi and bus stopping areas may
result in temporal abnormality. Some of these char-
acteristics have a constant impact while others (e.g.,
large bus areas) have a situation-dependent impact
(e.g., the time of the day). Challenge 3 focuses on
learning the reliability of the incident alarms of an IC,
depending on the current situation.
Since this information is not directly available,
we have to learn the corresponding reliability at run-
time. The basic idea of this Challenge 3 is (a) to com-
bine the observations of neighbouring ICs and (b) to
use their situation-dependent reliability estimation for
the IC under consideration in an ensemble-based ap-
proach again. For the first step (a), we propose to fol-
low a similar approach as already used in OTC for the
online signalisation adaptation: We make use of rein-
forcement learning capabilities. The concept utilises
a variant of an XCS that maps a traffic situation (mea-
sured at the neighbouring intersection) to a reliability
estimation of the incident alarm of the considered IC
– and then learns the accuracy and fitness of the reli-
ability estimation over time. This has to be done for
all neighbouring intersections. For the second step
(b), we propose to use the reliability estimations of
each neighbour as input and compute an aggregated
measure. Initially, each neighbour has one vote and
we will have to investigate if it is possible to im-
prove the behaviour by adapting these votes (i.e., the
weights assigned to the input of a neighbour). An-
other aspect of the challenge in this context is that
for the bilateral approach only one or two neighbours
are involved in most cases (based on the design of the
approach). Consequently, the ensemble itself faces
a dynamic constellation of participants. We need to
further investigate how this affects the success of the
estimation.
Challenge 4: Consideration of Incident
Information in Control Strategies
Based on OTC, we have to investigate how reliable in-
cident information can be considered in the different
aspects of the controller decisions: (a) for adapting
the signalisation, (b) for maintaining PSS, and for (c)
modification of route guidance information.
For aspect (a), we have to investigate possibilities
to modify the decision system of the adaptation cy-
cle. Alternatives include: (i) extending the situation
description as basis for the adaptation loop with in-
cident information (drawback: is not part of initial
rules, increases the search space), (ii) artificially de-
creasing the traffic volumes of the situation descrip-
tion towards an outgoing section if the incident is part
of this road segment (drawback: affects the learning
mechanism, the exact value for reduction has to be
determined), or (iii) modify traffic volumes by extrap-
olating the (estimated) impact of the incident (draw-
back: affects the learning mechanism). However, in
all cases, we have to assess the implications on the
learning feedback and the resulting self-improving
adaptation behaviour.
For aspect (b), the PSS algorithm needs to be mod-
ified – which select partners based on the current traf-
fic flow volumes and coordinates the signalisation of
those ICs that serve the traffic streams with the highest
number of vehicles (i.e., negotiating common cycle
times and offsets). Incident information can be used
to alter these mechanisms in different ways, including
the following:
1. Anticipatory switching to alternative PSS since
the incident is expected to decrease the traffic vol-
umes to be served by the current PSS.
2. Favouring coordination schemes that are expected
to alleviate the impact of the incident (e.g., those
that faster release traffic affected by the incident).
3. Prefering PSS that avoid reported incidents.
Since each IC decides autonomously, the incident
information (such as reliability, severity, expected im-
pact, and type) has to be considered in the decision
process when choosing partners and signalising the
need for a PSS update. An incident-aware approach
has to estimate the benefit of changing the PSS in re-
sponse to the incident, where “benefit” is computed
in terms of cars being served and the uncertainty as-
signed to this result.
For aspect (c), we rely on existing work, i.e. two
variants of fully decentralised route guidance mech-
anisms imitating the Distance-Vector Routing (DVR)
and the Link-State Routing (LSR) protocols (Proth-
mann et al., 2012). Both are based on broadcast-
ing local traffic data: ICs exchange either a topol-
ogy graph of the controlled intersection (i.e., includ-
ing in- and outgoing roads, neighbour information,
and destination information) augmented with the cur-
rent traffic conditions (i.e., occurring delays and ex-
pected travel times – LSR variant) or propagate short-
est paths through the network (DVR variant). In the
LSR variant, shortest paths have to be determined for
each incoming section based on, e.g., Dijkstra’s al-
gorithm, while the DVR variant directly provides this
A Concept for Collaborative Incident Validation in a Self-organised Traffic Management System
321

information. The resulting shortest path information
(i.e., the list of considered destinations together with
the next hop/turning advice at the intersection and the
expected travel time) are displayed via Variable Mes-
sage Signs (VMS) for each road approaching the in-
tersection. Here, incident awareness requires modifi-
cations of these concepts.
Assuming a static acceptance rate, i.e. a given per-
centage of drivers that will follow the recommenda-
tions displayed via VMS, leads to the question of how
a variation of the acceptance rate within simulations
has an impact on the outcome (following the method
suggested in (Bazzan and Kluegl, 2005)). Hence, we
have to investigate how (i) the routing protocol and
(ii) the computation of route recommendations has
to be modified to consider incident information. For
the LSR variant, this initially means to further anno-
tate the topology graph representation to be commu-
nicated via broadcasts. Therefore, edges of the graph
representation can be annotated with additional val-
ues representing the incident status, the estimated im-
pact (i.e., severity and duration), and the reliability
of this information. After broadcasting this topology
information, each IC can build a complete graph rep-
resentation of the underlying road network on its own
and can compute shortest paths. However, we have
to investigate how these computations are impacted
by incident information: (a) individual roads suffer-
ing from incidents have to be avoided, (b) intersec-
tions affected by incidents have to be avoided, and
(c) paths that bypass incident areas have to be pre-
ferred. For instance, this can be done by introducing
static penalty values for links and nodes, introducing
varying penalty values (e.g., in a gradient approach
surrounding the incident area), or removing links and
nodes from the graph representation. We have to anal-
yse and compare these concepts. As an alternative,
a multi-objective variant of Dijkstra’s algorithm may
be developed. For the DVR variant, similar consider-
ations as for deriving shortest paths have to be done
when updates of routing entries arrive via broadcast
messages.
5 CONCLUSIONS
In this work, we argued that traffic incident detec-
tion in urban road networks is different to that at
highways. Following recent results, clustering ap-
proaches allow for appropriate reliability of detected
events – which can be performed locally at intersec-
tions. However, to incorporate incident information
in signalisation strategies (for green duration modifi-
cation, progressive signal systems, and even for route
guidance), the uncertainty has to be reduced. Conse-
quently, we propose to utilise of local dependencies
in self-organised road networks as traffic flows pass
several intersections. This spatio-temporal behaviour
can be used to collaboratively compare and analyse
flow information – and to either confirm incident in-
dicators or to reject them in a self-organised manner.
We proposed a research agenda comprising four
major challenges: (a) collaborative validation of
stream-based incident classification, (b) collaborative
self-assessment of sensory equipment, (c) learning
the reliability of estimations, and (d) Consideration
of incident information in signalisation strategies. We
provided conceptual approaches to tackle these chal-
lenges – based on an integration in the Organic Traffic
Control system and the available cluster-based inci-
dent detection approach. Our current and future work
focuses on the subsequent implementation of the con-
cepts and the subsequent tackling of these challenges.
ACKNOWLEDGEMENTS
This research was supported by the Deutsche
Forschungsgemeinschaft, DFG, in the context of the
project “Zwischenfall-bewusstes resilientes Verkehrs-
management f
¨
ur urbane Straßennetze (InTURN)” un-
der grant TO 843/5-1. We acknowledge this support.
REFERENCES
Ahmed, S. and Cook, A. (1980). Time series models for
freeway incident detection. Transp. Eng. J of the Am.
Soc. of Civ. Eng., 106(6):731–745.
Aimsun (2021). Aimsun Next 20 User’s Manual, Aimsun
Next 20.0.3 edition.
Bazzan, A. and Kluegl, F. (2005). Case studies on the braess
paradox: Simulating route recommendation and learn-
ing in abstract and microscopic models. Transp. Res.
Part C: Emerging Tech., 13(4):299 – 319.
Dudek, C., Messer, C., and Nuckles, N. (1974). Incident de-
tection on urban freeways. Transp. Res. Rec., 495:12–
24.
Dudek, C., Weaver, G., Ritch, G., and Messer, C. (1975).
Detecting freeway incidents under low-volume condi-
tions. Transp. Res. Rec., 533:34–47.
Dusparic, I. and Cahill, V. (2009). Using distributed w-
learning for multi-policy optimization in decentralized
autonomic systems. In Proc. of 6th Int. Conf. on Au-
tonomic Computing, pages 63–64. ACM.
Ester, M., Kriegel, H.-P., Sander, J., and Xu, X. (1996).
A density-based algorithm for discovering clusters in
large spatial databases with noise. In kdd, pages 226–
231. AAAI Press.
VEHITS 2022 - 8th International Conference on Vehicle Technology and Intelligent Transport Systems
322

Feng, Y., Hourdos, J., and Davis, G. (2014). Probe vehicle
based real-time traffic monitoring on urban roadways.
Transp. Res. Part C: Emerging Tech., 40:160–178.
Gall, A. and Hall, F. (1989). Distinguishing between inci-
dent congestion and recurrent congestion: a proposed
logic. Transp. Res. Rec., (1232).
Gokulan, B. and Srinivasan, D. (2010). Distributed geomet-
ric fuzzy multiagent urban traffic signal control. IEEE
Trans. on Int. Transportation Sys., 11(3):714–727.
Helbing, D., L
¨
ammer, S., and Lebacque, J. (2005). Self-
organized control of irregular or perturbed network
traffic. Optimal control and dynamic games, pages
239–274.
Jenelius, E. and Koutsopoulos, H. (2013). Travel time esti-
mation for urban road networks using low frequency
probe vehicle data. Transp. Res. Part B: Methodolog-
ical, 53:64–81.
Kamijo, S., Harada, M., and Sakauchi, M. (2004). An in-
cident detection system based on semantic hierarchy.
In Proc. of 7th Int. Conf. on Int. Trans. Sys. (ITS’04),
pages 853–858. IEEE.
Lin, W. and Daganzo, C. (1997). A simple detection scheme
for delay-inducing freeway incidents. Transp. Res.
Part A: Policy and Practice, 31(2):141–155.
Mauro, V. and Taranto, C. D. (1990). Utopia. Control,
computers, communications in transportation.
M
¨
uller-Schloer, C. and Tomforde, S. (2017). Organic
Computing-Technical Systems for Survival in the Real
World. Springer.
Oliveira, L. D. and Camponogara, E. (2010). Multi-agent
model predictive control of signaling split in urban
traffic networks. Transp. Res. Part C: Emerging Tech.,
18(1):120–139.
Payne, H. and Tignor, S. (1978). Freeway incident-
detection algorithms based on decision trees with
states. Transp. Res. Rec., (682).
Payne, H. J. (1975). Freeway incident detection based upon
pattern classification. In Proc. of IEEE Conf. on Deci-
sion and Control, volume 14, pages 688–692. IEEE.
Prothmann, H., Branke, J., Schmeck, H., Tomforde, S.,
Rochner, F., H
¨
ahner, J., and M
¨
uller-Schloer, C.
(2009). Organic traffic light control for urban road net-
works. Int. J. Auton. Adapt. Commun. Syst., 2(3):203–
225.
Prothmann, H., Tomforde, S., Lyda, J., Branke, J., H
¨
ahner,
J., M
¨
uller-Schloer, C., and Schmeck, H. (2012).
Self-organised routing for road networks. In Self-
Organizing Systems - 6th IFIP TC 6 International
Workshop, IWSOS 2012, Delft, The Netherlands,
March 15-16, 2012. Proceedings, pages 48–59.
Robertson, D. and Bretherton, D. (1991). Optimizing net-
works of traffic signals in real time – the SCOOT
method. IEEE Trans. on Veh. Tech., 40(1):11–15.
Schrank, D., Albert, L., Eisele, B., and Lomax, T. (2021).
2021 URBAN MOBILITY REPORT.
Schrank, D., Eisele, B., and Lomax, T. (2019). 2019 UR-
BAN MOBILITY REPORT.
Shehata, M., Cai, J., Badawy, W., Johannesson, R., and
Radmanesh, A. (2008). Video-based automatic inci-
dent detection for smart roads: The outdoor environ-
mental challenges regarding false alarms. IEEE Trans.
on Int. Transp. Sys., 9(2):349–360.
Sims, A. and Dobinson, K. (1980). The Sydney coordinated
adaptive traffic (SCAT) system – Philosophy and ben-
efits. IEEE Trans. on Veh. Tech., 29(2):130–137.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2013). Using
a neural network for forecasting in an organic traf-
fic control management system. In 2013 Workshop
on Embedded Self-Organizing Systems, ESOS’13, San
Jose, CA, USA, June 25, 2013.
Sommer, M., Tomforde, S., and H
¨
ahner, J. (2016). Forecast-
augmented route guidance in urban traffic networks
based on infrastructure observations. In Proceedings
of the International Conference on Vehicle Technol-
ogy and Intelligent Transport Systems, VEHITS 2016,
Rome, Italy, April 23-24, 2016, pages 177–186.
Stephanedes, Y. and Chassiakos, A. (1993). Freeway inci-
dent detection through filtering. Transp. Res. Part C:
Emerging Technologies, 1(3):219–233.
Studer, L., Ketabdari, M., and Marchionni, G. (2015). Anal-
ysis of adaptive traffic control systems design of a de-
cision support system for better choices. J Civil Envi-
ron Eng, 5(195):2.
Takaba, S. and Matsuno, H. (1985). Traffic incident detec-
tion using correlation analysis. In SCS 1985 Summer
Comp. Sim. Conf., pages 529–534.
Thomsen, I., Zapfe, Y., and Tomforde, S. (2021). Urban
traffic incident detection for organic traffic control: A
density-based clustering approach. In Proceedings of
the 7th International Conference on Vehicle Technol-
ogy and Intelligent Transport Systems, VEHITS 2021,
Online Streaming, April 28-30, 2021, pages 152–160.
Tomforde, S., Prothmann, H., Branke, J., H
¨
ahner, J., Mnif,
M., M
¨
uller-Schloer, C., Richter, U., and Schmeck, H.
(2011). Observation and control of organic systems.
In Organic Computing—A Paradigm Shift for Com-
plex Systems, pages 325–338. Springer.
Tomforde, S., Prothmann, H., Rochner, F., Branke, J.,
H
¨
ahner, J., M
¨
uller-Schloer, C., and Schmeck, H.
(2008). Decentralised progressive signal systems
for organic traffic control. In 2008 Second IEEE
International Conference on Self-Adaptive and Self-
Organizing Systems, pages 413–422. IEEE.
Vincent, R., Peirce, J., and Webb, P. (1990). Mova traffic
control manual. MOVA reports.
Webster, F. (1959). Traffic Signal Settings - Technical Paper
No 39. Road Research Laboratory, London, UK.
Willsky, A., Chow, E., Gershwin, S., Greene, C., Houpt,
P., and Kurkjian, A. (1980). Dynamic model-based
techniques for the detection of incidents on freeways.
IEEE Transa. on Automatic Control, 25(3):347–360.
Wilson, S. W. (1995). Classifier Fitness Based on Accuracy.
Evolutionary Computation, 3(2):149–175.
A Concept for Collaborative Incident Validation in a Self-organised Traffic Management System
323
