
Reducing Brain-computer Interaction Training Time with Embodied
Virtual Avatar
Filip
ˇ
Skola and Fotis Liarokapis
CYENS – Centre of Excellence, Nicosia, Cyprus
Keywords:
Brain-Computer Interfaces, Gamification, Motor Imagery, Sense of Agency, Virtual Embodiment, Virtual
Reality.
Abstract:
Brain-computer interfaces (BCI) have been intensely researched to provide a method for controlling comput-
ers, robots, and other machinery using mental activity only. Nevertheless, BCIs remain difficult to use in
everyday life. One of the major BCI paradigms, the motor imagery (MI), showed improved control perfor-
mance when avatar embodiment in virtual reality (VR) was exploited in the BCI system. Control accuracy was
further increased with gamification of the MI-BCI training procedure. This paper presents comparative study
of 3 types of MI-BCI training: with the standard protocol, mediated using a virtual avatar, and in a gamified,
embodied setting with progressive increase of the training pace. Overall analysis of the relationship between
embodiment and BCI performance showed robust embodiment illusion supported by correlation between the
sense of ownership towards the avatar and the sense of agency towards the BCI actions. Interestingly, the
actual control proficiency was uncorrelated to the perceived performance and to the sense of ownership. This
could work towards facilitation of the initial training steps similarly to designs exploiting positively biased
feedback.
1 INTRODUCTION
Brain-computer interfaces (BCI) have been subject of
intense research during the last decades, yet there are
numerous issues with their practical applications. Vir-
tual reality (VR) seems to be a promising tool aiding
to bring the BCIs towards users.
VR systems use the body for interaction. Ideally,
any part of the body can take part in the interaction
with an advanced VR system. VR aims to leverage
the most of the sensorimotor loop (Slater, 2009) – the
motor system as the human “output interface” which
is coupled with the sensory system serving for infor-
mation retrieval. VR intervenes in the midst of the
sensorimotor loop, using the data associated to the
motor system (position and orientation of the body
parts) as inputs, providing in turn synthesized per-
cepts with correct transformations to the sensory or-
gans. VR can be seen as a sensory illusion controlled
by bodily movements. This illusion can easily incor-
porate a visual rendering of a selected body (virtual
avatar), acting in synchrony with the user movements.
BCIs aim to allow humans to communicate and
act while bypassing the motor system (Graimann
et al., 2010). One of their main purposes is to enable
communication in people who can not move at all,
which is accomplished by using mental commands
(translated from the brain signals) as the input in-
terface for computers, robotics, and general machin-
ery. Healthy users can leverage BCIs for monitoring
of affective and cognitive states (M
¨
uhl et al., 2014),
e.g. for using information about estimated level of
invested attention as additional input for computer
games or meditation training (Kerous et al., 2017).
This paper presents results on research of brain-
computer communication facilitated using avatar em-
bodiment in VR. The main purpose of combining BCI
and VR was to facilitate the training task for BCI
communication (imagery of hand movements) with
adequate feedback (hand movements performed by
the surrogate body in VR). This research is focused
on the BCI communication paradigm based on mo-
tor imagery (MI, MI-BCIs), which exploits changes
in neural activity generated by consciously attending
to bodily movements.
The aim of this study was to investigate the ad-
vances in user training for MI-BCI usage by leverag-
ing embodiment and gamification in VR. Data from
3 groups of participants taken from 2 previous ex-
periments (
ˇ
Skola and Liarokapis, 2018;
ˇ
Skola et al.,
Škola, F. and Liarokapis, F.
Reducing Brain-computer Interaction Training Time with Embodied Virtual Avatar.
DOI: 10.5220/0011049100003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 1: GRAPP, pages 7-17
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
7

2019) which were part of a bigger study on embodied
VR MI-BCI training (
ˇ
Skola, 2020) were studied a) to
investigate the hypothesis that VR embodiment aids
the MI-BCI training procedure (reduces the required
training time), and b) to elucidate the mechanism be-
hind this effect. One studied group of participants was
trained using the standard training method with feed-
back using symbols. Training of the second group
was performed with avatar using virtual embodiment
(using user’s imagined movements as the input and
using the movements of the “surrogate” avatar body
as the output). Finally, the third group was trained
with a gamified VR application with avatar embodi-
ment. In the simple game wrapped around the train-
ing procedure, participants were trained using a more
visually appealing and engaging environment. More-
over, progressive increase of the training pace was in-
corporated.
This paper presents comparison of the between-
group results, as well as overall analysis of the data on
embodiment and BCI performance. The discussion is
focused on the grounds of the facilitating effect of VR
embodiment to the BCI communication training.
2 BACKGROUND
Control strategy in MI-BCIs consists of focused im-
agery on movement of own hands, feet, etc (Lotte
et al., 2015), mediated by user modulation of the
sensorimotor rhythm in the brain. Although most
people have some sensorimotor rhythm modulation
ability (Dickhaus et al., 2009), training is typically
needed to achieve a reasonable level of control accu-
racy. The training has usually a form of repeated tri-
als where users perform the MI process of specified
body parts, followed by immediate visual feedback
from the system, allowing users to understand if their
MI effort was recognized successfully. One of the
goals of the training is to enhance the ability to cre-
ate a distinct pattern of neural rhythm change during
the imagined movement, called event-related desyn-
chronization (ERD), in motor cortex parts associated
to the imagined body parts (Kaiser et al., 2014). This
consequently improves the prediction capabilities of
the machine learning side of the BCI system (Lotte
et al., 2015). The training process is a co-adaptation;
while the user is trained with the help of neurofeed-
back, the classifier in the BCI is trained as well (Lotte
et al., 2015).
Training for MI-BCIs is a mentally demanding
process. Users must direct their focused attention
to the movements of hands or feet for prolonged
amounts of time, while no actual movement is per-
mitted during the sessions. Moreover, the commonly
used training protocol uses symbolic visual instruc-
tions and abstract feedback forms to communicate
successfulness of the ongoing training MI commands.
This symbolic visual feedback is shown concurrently
with the MI process, leading to attention split be-
tween comprehension of the feedback and focusing
on movements of the body.
BCI research recently started to highlight the
importance of the human-facing side of the inter-
face (Lotte et al., 2013; Jeunet et al., 2016a; Jeunet
et al., 2016b; Kosmyna and L
´
ecuyer, 2017; Sollfrank
et al., 2016). Main criticism considered the standard
training protocols, for the reasons they ignore elemen-
tary psychological findings about the optimal forms
of training (e.g., using progressive or adaptive task
design, exploiting rich feedback modalities (Jeunet
et al., 2016b)). Some of these problems can be allevi-
ated by exploiting gamification, which can be defined
as “the use of game design elements in non-game con-
texts” (Deterding et al., 2011). In the BCI context,
gamification is helpful especially as it aims to im-
prove immersion and motivation (de Freitas, 2011).
BCIs are often used as game input interfaces, both
for training or other research purposes (Kerous et al.,
2017).
Past research has demonstrated that the visual rep-
resentation of the self in VR can be utilized to facil-
itate the BCI control (Salisbury et al., 2016; Vour-
vopoulos and Berm
´
udez i Badia, 2016; Vourvopoulos
et al., 2019;
ˇ
Skola and Liarokapis, 2018;
ˇ
Skola et al.,
2019). The virtual agent is usually called avatar and
the subjective experience of having and being inside a
virtual body virtual embodiment (Kilteni et al., 2012).
Human brain has special mechanisms for recognition
and self-attribution of the “attached” body, using prior
knowledge and the available sensory data (Jeannerod,
2003). In VR, the visual contact with own body is
cut off and replaced by the rendering of the avatar.
First person view of a body that acts in accordance
with one’s will creates a strong embodiment illusion,
including self-attribution of the avatar body. Conse-
quently, people immersed in VR with an embodied
avatar tend to keep their avatars away from virtual
dangers, eliciting similar physiological responses to
the threats as if they were performed in the physical
reality and the real body was at stake (Meehan et al.,
2002).
When the body is self-attributed, one experi-
ences what is termed the sense of (bodily) owner-
ship (SoO) (Gallagher, 2000). The sense of being
the author (agent) of the voluntary actions is termed
the sense of agency (SoA). The SoA can be defined
in terms of the authorship of the voluntary move-
VISIGRAPP 2022 - 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications
8

Figure 1: Openvibe implementation of the Graz training
protocol (symbolic guidance); top: instruction to perform
a right hand MI trial, bottom: feedback (an extending bar)
representing a relatively confident classifier decision that
the current participant’s mental effort belongs to the right
hand MI class.
ments (Blanke and Metzinger, 2009), but more com-
monly the definition includes also the covert actions
such as creating an intent or a thought in the stream of
thoughts (Gallagher, 2000; Gallagher, 2007). BCIs al-
low manifestation of one’s SoA using covert actions;
i.e., BCIs allow for translation from the intention to
an action without any movement.
3 METHODS
3.1 Compared Variables
Embodiment was quantified using questionnaires on
SoO and SoA (standard questions from studies on
body ownership were used, based on (Botvinick and
Cohen, 1998; Longo et al., 2008)), answered on a Lik-
ert scale from -3 to +3, after the experiment. BCI per-
formance was calculated as a) total time spent in the
correct MI state (recognized by the classifier) and b)
percentage of successfully recognized MI actions (a
normalization between study (
ˇ
Skola and Liarokapis,
2018) in Section 3.2 and the study (
ˇ
Skola et al., 2019)
in Section3.3 had to be performed, the details on nor-
malization are provided in Section 4.1). Addition-
ally, bit-transfer rate (BTR) was calculated and used
in the comparison. For the purposes of comparing the
first run of training (when the feature set for the ini-
tial training of the classifier was being created), cross-
validation classification accuracy (CCA) obtained and
analyzed.
Figure 2: Screenshot from the VR scene used for the train-
ing in the Embodied group of participants (resting phase).
3.2 Study Comparing Standard and
Embodied Training
The first study leveraging embodied VR training for
MI-BCI (
ˇ
Skola and Liarokapis, 2018) aimed to assess
the difference between usage of the standard Graz MI-
BCI training protocol with symbolic feedback (see
Figure 1) and the newly designed embodied paradigm
for BCI training (Figure 2). For purposes of creat-
ing the embodied training, a body ownership illusion
with binding of the SoO and the SoA using actions
performed with the MI-BCI was necessary to be im-
plemented. That was achieved by initiating the ex-
periment directly with the synchrony between mental
effort and visual outcomes of the VR environment, to
facilitate the body ownership transfer (embodiment)
from the beginning of the experiment. In other words,
active thought process focused on the imagery hand
movements bound to the visual representation of the
moving virtual hands was the driving mechanism be-
hind BCI-mediated embodiment.
Design of the VR scenes for interaction with MI-
BCIs is subject to constraints, arising from the neces-
sity to maintain a stable bodily posture without en-
gagement of voluntary muscles, including minimiza-
tion of the eye movements. The reasons for that are
that the ongoing EEG signals are prone to artifacts,
generated either by both bodily and external sources.
Bodily artifacts are mainly caused by muscle activ-
ity from the facial area and the muscles around the
neck. But even movement of the other parts of the
Reducing Brain-computer Interaction Training Time with Embodied Virtual Avatar
9

body would have unwanted effects on the signal, ei-
ther by generation of the EEG artifacts, or by contam-
ination of the signals with brain signals originating
from the activations in the motor cortex.
In the very first run of the training, the EEG
data for personalized per-trial neurofeedback were not
available. For that reason, movements of the avatar
were carried out without an input from the BCI (the
avatar performed the hand movements with natural
speed). Still, participants were required to synchro-
nize their mental imagery to the observed movements,
to a) provide an initial feature set for the classifier
training (system training with the features containing
MI patterns); and b) facilitate the embodiment illu-
sion due to the synchrony between the users’ MI effort
and the visual feedback. Motor action observation is
known to contribute to ERD strengthening during the
MI (Kondo et al., 2015), further facilitating the initial
training step.
The proposed embodied training aimed to cor-
rect sub-optimal elements of the training procedure,
especially the feedback modality (incomprehensive
guidance causing split between the task and the pro-
vided feedback), touching the motivational aspects of
the training. The main feedback method was using
the movements of the avatar, specifically its speed;
natural movements indicated good BCI performance,
while movements that were slowed-down (eventually
almost to the point of stopping) indicated problems of
the BCI system to comprehend the user EEG inputs.
From the 30 participants in this study, control
group (N = 15) was trained using the Graz training
protocol (Openvibe implementation) on the standard
computer screen, while experimental group (N = 15)
was trained using the novel embodied protocol. BCI
control was mediated using imagined movement of
left and right hand, aiming to push the virtual but-
ton in front of the participants. After two runs of the
training, all participants accomplished the same task –
pushing of the virtual button. Brain signals were col-
lected using a 20-sensor set-up based on a lightweight
wireless EEG device.
Questionnaire results on embodiment revealed the
mean SoO was equal to 0.700 (SD = 1.670) and the
mean SoA rating was 1.400 (SD = 1.283). These val-
ues show a relatively high sense of embodiment for
the novel design. See the original paper (
ˇ
Skola and
Liarokapis, 2018) for a detailed information on the
study.
Figure 3: VR feedback representing a recently finished right
hand MI trial in the Progressive group.
3.3 Study using Gamification and
Progressive Pace for Training
The novel VR application created as a gamified vari-
ant of the MI-BCI training (
ˇ
Skola et al., 2019) kept
most from the standard trial-based form of the MI-
BCI training (randomized training trials grouped into
several stages, with given cue before each trial, and
randomized rest period after each trial). Gamified
training employed themed environment and score
points, while the challenge in the game arose mainly
from the progressive increase of the speed across sev-
eral training runs, or levels (categories of motivational
affordances were adapted from (Hamari et al., 2014)).
Feedback on user progress was provided using three
modalities:
1. Embodied feedback mediated by the speed of
avatar hand movements (real-time)
2. “Score” displayed in the VR scene (post-trial
quantification of the trial accuracy)
3. Vibrotactile feedback to the corresponding hand
mediated by the VR controllers (real-time)
The VR scene was set in the outer space, the par-
ticipant was virtually transferred inside a cockpit of
a spaceship with an Earth-like planet ahead (see Fig-
ure 3). The gamified training objectives consisted of
shooting flying asteroids depending on their position
(using left hand MI if the asteroid flew from the left
side of the spaceship, right hand MI if from the right
side). The spaceship contained a simple control panel
consisting of a low number of interaction elements
that triggered the weapons shooting the asteroids fly-
ing towards the planet.
Training was designed as progressive; i.e., pace of
each run was higher than the preceding one. The user
evaluation consisted of six runs of the training, while
the first run consisted of MI facilitated by motor ob-
servation and the other runs provided participant with
VISIGRAPP 2022 - 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications
10

increasingly faster paced training. Last run inquired
into a modality change experiment (post-trial discrete
feedback only, without the real-time feedback). For
more details please see the paper (
ˇ
Skola et al., 2019).
The VR training environment was evaluated in
a between-subject user study with 19 participants
(N = 20 including a participant falling below chance
level) performing 6 runs of the training. Signals were
collected with 28 sensors using the same device as
in the previous study. Questionnaires revealed a sur-
prisingly high positive affect after the experimental
session (mean 6.763, SD = 0.348, on a scale from 1
to 7). No participant reported the engagement or in-
terest lower than 6 out of 7 points. Mean of the SoO
statements was 0.768 (SD = 1.190) and the mean SoA
was 1.290 (SD = 0.947).
3.4 Compared Groups and Results
The following 3 groups are analyzed in this paper:
• From the user study comparing the embodied
VR training to the standard method (
ˇ
Skola and
Liarokapis, 2018)
– Control group (participants trained with the
standard protocol)
– Embodied group (participants trained with em-
bodied avatar in VR)
• From the user study on gamified progressive train-
ing in embodied VR (
ˇ
Skola et al., 2019)
– Progressive/Gamified group (participants
trained with embodied avatar in gamified,
progressive VR)
To perform the analysis covering all these
datasets, the following was taken into account:
• Accuracy and BTR in the 3rd run (maximal num-
ber of common training runs for all datasets)
• Accuracy and BTR of the best run per participant
• Number of participants not surpassing the chance
level
• CCA in the first run without real-time feedback
(to study the influence of the initial VR embodi-
ment with motor action observation)
Non-parametric statistical tests were used due to
non-normal distribution of the data.
4 RESULTS
4.1 Normalization of the Performance
Results
4.1.1 Accuracy Metric Used in the Analyses
In (
ˇ
Skola and Liarokapis, 2018), the on-line accuracy
was reported as an average of percentages of time
in each trial spent in the correct MI state. On-line
accuracy metric called “hit-wise accuracy” (percent-
age of trials with >50% successful time) was used
in (
ˇ
Skola et al., 2019), representing the percentage of
successfully issued commands using a two-class BCI.
In comparison to the accuracy metric from (
ˇ
Skola and
Liarokapis, 2018), it also shows a stronger correlation
to the CCA. In Control group r = 0.746, p = 0.543 ver-
sus r = 0.523, p = 0.229; in Embodied group r = 0.619,
p = 0.024 versus r = 0.480, p = 0.097; in Progressive
group r = 0.714, p = 0.001 versus r = 0.620, p = 0.005
(Spearman tests). Consequently, the “hit-wise accu-
racy” was utilized for the overall analysis, and all
the performance results from (
ˇ
Skola and Liarokapis,
2018) were recalculated for purposes of this paper.
4.1.2 Differences between the Accuracy Metrics
and the BTR
In (
ˇ
Skola and Liarokapis, 2018), the average trial
length was 14.805 s (feedback training) and 14.628 s
(evaluation run), including the rest periods. The tri-
als were significantly shortened in the follow-up study
(min = 6.098 s, max = 12.853 s), see Table 2. Con-
sequently, the former BTR values are very low, and
the on-line accuracy serves better for comparison of
the performance in the three conditions. In particu-
lar, accuracy in the 3rd run can be used to compare
the performance after the same amount of training tri-
als (from the two preceding training runs, with one
including feedback).
Nonetheless, the average of the total training du-
ration was 24.616 minutes in the comparison study
and 28.153 minutes in the gamified progressive study.
The best run accuracy represents the performance af-
ter a comparable time spent training (rather than after
the same number of training trials performed). But
still, the length of the training in the latter study was
increased by 14.369%.
The BTR values demonstrate the performance in-
crease obtained by employment of the higher pace and
the progressive design of the Progressive group, com-
pared to the initial embodied design of the Embodied
group.
Reducing Brain-computer Interaction Training Time with Embodied Virtual Avatar
11

Table 1: Comparison of the BCI performance across all tested groups; average on-line accuracy, BTR, and SD in parentheses.
Groups marked as w/s-ch-l include sub-chance-level participants.
Group N Accuracy (run 3) Accuracy (best run) BTR (run 3) BTR (best run)
Control 7 62.286% (8.655) 62.286% (8.655) 0.267 (0.396) 0.267 (0.396)
Embodied 13 65.385% (16.132) 67.153% (14.960) 0.700 (1.306) 0.728 (1.292)
Progressive 19 67.105% (10.603) 75.842% (11.251) 0.825 (0.949) 1.992 (1.992)
Control (w/s-ch-l) 15 53.067 % (11.386) 53.067% (11.386) 0.160 (0.288) 0.160 (0.288)
Embodied (w/s-ch-l) 15 63.333% (15.886) 64.867% (15.109) 0.606 (1.234) 0.631 (1.223)
Progressive (w/s-ch-l) 20 66.250% (11.007) 74.400% (12.709) 0.784 (0.942) 1.893 (1.606)
Table 2: Averaged duration of a trial including the rest pe-
riod in each of the runs (levels) in the Progressive group
(Avg. trial length) and a maximal duration of the MI part
(user effort) of a trial (Max. MI length).
Run # Avg. trial length Max. MI length
2nd 12.853 8.8
3rd 8.977 5.15
4th 7.143 3.93
5th 6.098 3.325
6th 7.158 3.9
4.2 BCI Performance Comparison
4.2.1 Accuracy and BTR per Training Method
Table 1 contains average performance results per-
group (accuracy and BTR), while Figure 4 shows box-
plots representing the average accuracy. The method
used in the Progressive group produced the best re-
sults in all performance metrics. The analyses were
focused on the subsets of participants who were able
to surpass the chance levels, but results including the
sub-chance-level participants (N = 11, details in Ta-
ble 3) are stated as well.
Performance variability among BCI users ac-
counted for a low statistical significance of the dif-
ferences among the groups. Generally, the differ-
ences are worth testing for statistical significance if
the sub-chance-level participants are included in the
sample. Sample sizes of groups after pruning of the
subjects without any control become low and strongly
●
●
●
●
Control (run 3) Embodied (run 3) Progressive (run 3) Progressive (best run)
50 60 70 80 90 100
Group
Accuracy (%)
Figure 4: Boxplots showing per-group BCI performance
(accuracy).
unbalanced. The strongest difference (tested with
Wilcoxon test) is between accuracy values of Progres-
sive and Control group with W = 51.500 and p = 0.001
(with the sub-chance level participants included).
4.2.2 Participants below the Chance Level
Performance was analyzed from the subset of partici-
pants surpassing the 50% chance level in at least one
of the runs. Nevertheless, participants below that line
are also important to take into account, as they can
be considered an indicator of the BCI illiteracy (ra-
tio of untrainable participants). Table 3 contains an
overview of the percentage of participants not able to
surpass the chance level in any of the runs in a session.
Table 3: Number of participants (s-ch-l stands for sub-
chance-level) not surpassing chance level (third column) in
any of the runs per MI-BCI group.
Group N N [s-ch-l] Rate
Control 15 8 56.333%
Embodied 15 2 13.333%
Progressive 20 1 5.000%
Even though the comparison was carried out
among groups with different number of runs (the Pro-
gressive group with 5 on-line runs and the other two
groups with 2 on-line runs), all but the one partici-
pant in the Progressive achieved >50% accuracy al-
ready in the first two runs. Thus even after compar-
ison of the data from the first two runs only, the fig-
ures remain the same. This might be caused by sim-
ply more engaging design of the Progressive training
compared to the Embodied training, but the number
of sub-chance-level individuals is not very different
in these two groups. Nevertheless, comparison to the
Control group indicated both embodied designs as a
significant improvement.
4.3 Embodiment and BCI Performance
4.3.1 Effect of the Initial Embodiment
Effect of the combined MI and motor observation dur-
ing the first stage of the training was assessed using
VISIGRAPP 2022 - 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications
12
●
●
●
Control Embodied Progressive
60 65 70 75 80 85
Group
CA (%)
Figure 5: Boxplots showing CCA of the dataset correspond-
ing to the initial training. The results are shown per training
method, without the sub-chance-level participants.
the CCA in the first run (see Figure 5). This CCA
represents the initial ability of the classifier to distin-
guish between the classes based only on the feedback-
less training (VR avatar movements were shown, but
with no input from the BCI), thus allowing to estimate
how much the embodiment facilitated the differences
between participants’ ERDs for the left and right hand
MI.
Results show that the Control group had a lower
CCA (mean 66.267%, SD = 4.621) than the other
groups (Embodied mean 68.600%, SD = 7.089; Pro-
gressive mean 70.821%, SD = 5.268). The difference
is statistically significant between the Progressive and
the Control groups (W = 222, p = 0.017), suggesting
that the first stage of training with embodiment illu-
sion indeed helped the initial classifier training, com-
pared to the training with the standard Graz protocol.
Future work should investigate the effect of move-
ment observation (in comparison to the intentional
MI) on the initial ERDs. Removal of the real-time
feedback in the progressive MI-BCI training study
provides evidence that the training is not completely
hindered after the movement observation is removed
from the feedback, but more data on the relationship
between MI, motor observation, and ERD generation
should be gathered.
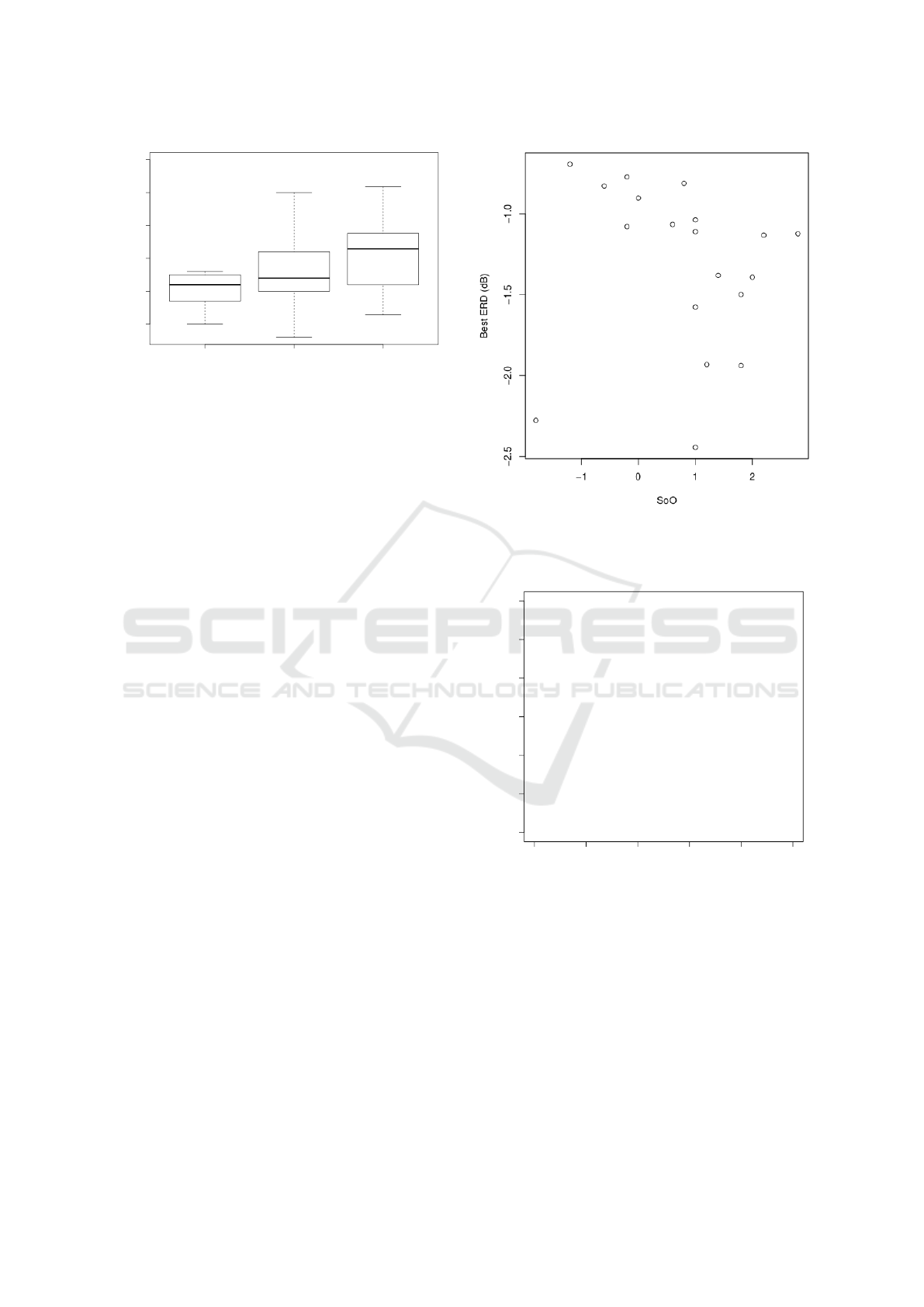
4.3.2 SoO, SoA, and BCI Performance
First of all, Progressive group had the SoO correlated
to the magnitude of the ERD. High correlation coeffi-
cient and significance were reached in this group (r = -
0.698, p = 0.001, N = 18; see Figure 6). But in the
other two groups, the ERD–SoO relationship was not
confirmed.
Very strong correlation (r = 0.581, p = 0.000,
N = 49) was present also between the reported SoO
and the reported SoA (see Figure 7). Interestingly,
Figure 6: Relationship between the SoO and the ERD
in (
ˇ
Skola et al., 2019) (Embodied group). Apart from
an outlying participant, the higher SoO was bound to the
stronger ERD.
●
●
●
●
●
●
●
●
●
●
●
●
● ●
●
●
● ●
●
●
●
●
● ●
●
●
●
●●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
−2 −1 0 1 2 3
−3 −2 −1 0 1 2 3
SoA
SoO
Figure 7: Scatterplot showing the relationship between the
reported SoO and the reported SoA (Spearman r = 0.581,
p = 0.000, N = 49). Participants tended to experience a high
ownership towards the virtual hands controlled by the MI-
BCI when the notion of control was also high, indicating
sense of embodiment towards the virtual avatar.
the SoA and the BCI performance were not correlated
(r = 0.064, p = 0.660, N = 49), see details on Figure 8.
Finally, correlation between the SoO and the on-
line performance was not found (the correlation co-
efficient was with r = 0.018, p = 0.901, N = 49; see
Figure 9).
Reducing Brain-computer Interaction Training Time with Embodied Virtual Avatar
13
●
●
●
●
●
● ●●
● ●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
● ●
● ●
●
●
● ●
●
●
40 50 60 70 80 90 100
−2 −1 0 1 2 3
On−line accuracy of the best run (%)
SoA
Figure 8: Relationship between the SoA and the actual con-
trol proficiency (on-line accuracy of the best run). As the
hand movements of the avatar correlated to the participant
intentions in case of a good BCI performance (and partici-
pants were aware of this fact), correlation between the BCI
performance and the SoA (as the self-report on the per-
ceived performance) was expected. However, this was not
confirmed.
●
●
●
●
●
●
●
●
●
●
●
●
●●
●
●
●●
●
●
●
●
●●
●
●
●
● ●
●
●●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
●
40 50 60 70 80 90 100
−3 −2 −1 0 1 2 3
On−line accuracy of the best run (%)
SoO
Figure 9: The on-line BCI performance (accuracy) was not
related to the perceived SoO in the session.
5 DISCUSSION
Originally, we expected to see a linear relationship be-
tween the SoO and on-line BCI performance. The
reason for that was that the SoA towards own actions
is among the primary mechanisms that bind the SoO
for body parts (the belief that one controls a body
leads to the belief it is his/her body). Secondly, the
embodiment, manifested by the SoO towards avatar,
was hypothesized to facilitate the training, i.e., to al-
low a better BCI performance. In other words, a low
performance should hinder the body ownership trans-
fer, and a good performance should enable it; a high
level of the body ownership transfer should facilitate
the training, and a low level should hinder it.
Instead, the SoO was bound together with the
SoA. Importantly, if the SoO indeed depended on the
BCI performance, a standard novice BCI user start-
ing at a low level of performance could not leverage
the hypothesized function of the embodiment in train-
ing to actually improve (a low SoO during a poor BCI
control level would be hard to increase if the higher
SoO required better BCI control and vice versa). It
is thus beneficial that the level of the SoO did not
rely as much on the performance as it did on the sub-
jectively perceived performance; i.e., the perceived
SoA towards the BCI actions (see Figure 7). Thanks
to this relationship, the BCI-mediated embodiment
arose even in poorly-performing participants.
Our finding that the binding mechanism of the
body ownership illusion was independent on con-
trol proficiency helps to clarify why the embodied
VR yielded better performance results. Biased forms
of feedback in MI-BCI training (feedback indicating
better performance than the actual performance) have
been utilized to facilitate the training process (Bar-
bero and Grosse-Wentrup, 2010; Faller et al., 2012).
Usage of embodiment seems to help participants in
tackling the difficulties of the first training stages with
a similar mechanism.
Whether the gap between the actual and the per-
ceived performance gets eventually smaller and the
users naturally sharpen their skills in self-assessment
based on the feedback mapped onto the VR body, or
not, needs to be studied in a longitudinal study. It
is a question closely related to why the SoA was un-
correlated to the actual performance (accuracy). It is
possible that the interpersonal differences in the locus
of control and the self-discipline had major influence
to the perceived SoA. These effects can be even more
pronounced when only a single exposure to the BCI
system is made, and the self-assessment would im-
prove after repeated exposure (when comparison with
past performances can be done).
Finally, correlation between the reported SoO and
the strength of the ERD in MI trials provides fur-
ther evidence in favor of the hypothesis that train-
ing with avatar embodiment facilitates the MI-BCI
training by inducing the sense of embodiment. How-
ever, this effect was not consistent throughout the en-
tire dataset and was rather observed only in the Pro-
gressive group. This can be due to the largest num-
ber of trials and the highest achieved performances
VISIGRAPP 2022 - 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications
14

(compared to the other groups), but further valida-
tion of this effect is needed. In case a link between
the SoO and a correlate of the MI is confirmed in a
larger study, it will provide more evidence that subjec-
tively experiencing the avatar embodiment facilitates
pre-requisites for successful MI-BCI training (such as
generation of the stronger ERDs).
5.1 Limitations
Low and varying number of participants in the ana-
lyzed datasets is certainly the main limitation of this
study. This limits the extent to which generalizations,
especially from the between-group comparisons, can
be made and requests for more studies examining the
outlined phenomena with greater number of subjects.
Comparisons between the groups are further weak-
ened due to differences between the methodology of
the studies analyzed. Despite our effort to compensate
this issue with normalization of the data and providing
explanations on differences, it must be noted that data
from two, albeit closely related, studies were used in
this paper.
6 CONCLUSIONS
With MI-BCIs, people can control devices using an
interface that bypasses the motor functions of the
body, but exploits them at the same time. Even if only
at the imagery level, movement is still exploited in
this BCI paradigm, and motor actions must be under-
stood and well-imitated covertly to convey the control
signals in the EEG representations. The problematic
case when control is hindered due to an insufficient
level of the imagery skills can be mitigated with the
embodied feedback.
Providing a guidance could sound like a poor rea-
son to create an MI-BCI completely enclosed within
the VR, but it is important to take into account the
target user group, currently composed of people with
paralysis or disabilities. Embodied MI-BCI training
in VR could help the users similarly to the VR-based
BCI-assisted rehabilitation – by helping to reconnect
with the bodily functions.
Gamification and progressive increase of the train-
ing pace were exploited for the goals of boosting
user attention and motivation, resulting in further in-
crease of the BCI performance compared to VR alone.
Moreover, the number of participants not making any
progress in one session was lower in comparison to
the standard protocol, and participants reported a high
positive affect after the end of the session. Working
with the user motivation and affect in general may be
the key to the future of BCI research, as the perfor-
mance results are inseparable from the effort invested
by the participants.
The conditions enabling the body ownership
transfer in the BCI control were much looser in com-
parison to the cases when motor control is used to
convey one’s will. The reports on the SoA towards the
actions performed by the surrogate body were rather
high, and they were strongly correlated to the reported
SoO towards the virtual agent, suggesting a robust
sense of embodiment during the MI-BCI training. At
the same time, actual performance in BCI actions did
not go hand in hand with the perceived performance.
As the SoO was also strongly correlated to the mag-
nitude of the average ERD in the latter BCI experi-
ment, it seems that employment of the embodiment
could facilitate the training by a combination of the
elevated SoA (similarly as in the training designs us-
ing a positively biased feedback) and the strengthened
ERDs during MI when the avatar body is temporarily
accepted as the own body.
7 FUTURE WORK
The results provided in this work demonstrated that
the first-time and inexperienced users benefit from
the embodied training. The research was limited by
the short overall duration of the training procedure,
and it should be further researched if the VR train-
ing is feasible for longer periods of time. It is likely
that the several technological limitations concerning
the VR equipment (e.g., wearing the uncomfortable
HMD, practical problems due to the concurrent usage
of an HMD and the EEG) will be overcome due to
the technological advances accompanying the popu-
larization of VR technology. This would increase the
chances of a less demanding VR-BCI training in the
near future. If the training with HMDs could be on a
level of comfort comparable to the standard computer
screens, the conceptual advantage of the VR MI-BCI
could easily prevail.
Nonetheless, even if the whole training procedure
was mediated using VR, the typical BCI user needs to
be sufficiently accurate in control of the system even
outside VR, for many practical reasons. To make this
transition easier, AR seems to be the perfect candidate
for the future work. Embodiment in AR is by far not
as much explored as the VR embodiment, mainly be-
cause AR can easily incorporate the existing body of
the user. In the BCI-mediated communication, where
users are typically not moving at all, avatar in AR
makes perfect sense.
Reducing Brain-computer Interaction Training Time with Embodied Virtual Avatar
15

ACKNOWLEDGMENTS
This research was partially supported by the project
that has received funding from the European Union’s
Horizon 2020 Research and Innovation Programme
under Grant Agreement No 739578 and the Govern-
ment of the Republic of Cyprus through the Deputy
Ministry of Research, Innovation and Digital Policy.
REFERENCES
Barbero, l. and Grosse-Wentrup, M. (2010). Biased feed-
back in brain-computer interfaces. Journal of Neuro-
Engineering and Rehabilitation, 7(1):34.
Blanke, O. and Metzinger, T. (2009). Full-body illusions
and minimal phenomenal selfhood. Trends in Cogni-
tive Sciences, 13(1):7–13.
Botvinick, M. and Cohen, J. (1998). Rubber hands’
feel’touch that eyes see. Nature, 391(6669):756.
de Freitas, S. (2011). Technology: Game for change. Na-
ture, 470:330–331.
Deterding, S., Dixon, D., Khaled, R., and Nacke, L. (2011).
From game design elements to gamefulness: defin-
ing” gamification”. In Proceedings of the 15th inter-
national academic MindTrek conference: Envisioning
future media environments, pages 9–15.
Dickhaus, T., Sannelli, C., M
¨
uller, K.-R., Curio, G., and
Blankertz, B. (2009). Predicting BCI performance to
study BCI illiteracy. BMC Neuroscience, 10(Suppl
1):P84.
Faller, J., Vidaurre, C., Solis-Escalante, T., Neuper, C., and
Scherer, R. (2012). Autocalibration and Recurrent
Adaptation: Towards a Plug and Play Online ERD-
BCI. IEEE Transactions on Neural Systems and Re-
habilitation Engineering, 20(3):313–319.
Gallagher, S. (2000). Philosophical conceptions of the self:
implications for cognitive science. Trends in Cogni-
tive Sciences, 4(1):14–21.
Gallagher, S. (2007). The Natural Philosophy of Agency.
Philosophy Compass, 2(2):347–357.
Graimann, B., Allison, B., and Pfurtscheller, G., editors
(2010). Brain-computer interfaces: revolutionizing
human-computer interaction. Frontiers collection.
Springer, Heidelberg. OCLC: ocn707710772.
Hamari, J., Koivisto, J., and Sarsa, H. (2014). Does Gam-
ification Work? – A Literature Review of Empirical
Studies on Gamification. In 2014 47th Hawaii Inter-
national Conference on System Sciences, pages 3025–
3034.
Jeannerod, M. (2003). The mechanism of self-recognition
in humans. Behavioural brain research, 142(1):1–15.
Jeunet, C., Jahanpour, E., and Lotte, F. (2016a). Why stan-
dard brain-computer interface (BCI) training proto-
cols should be changed: an experimental study. Jour-
nal of neural engineering, 13(3):036024.
Jeunet, C., N’Kaoua, B., and Lotte, F. (2016b). Advances in
user-training for mental-imagery-based BCI control:
Psychological and cognitive factors and their neural
correlates. Progress in brain research, 228:3–35.
Kaiser, V., Bauernfeind, G., Kreilinger, A., Kaufmann, T.,
K
¨
ubler, A., Neuper, C., and M
¨
uller-Putz, G. R. (2014).
Cortical effects of user training in a motor imagery
based brain–computer interface measured by fNIRS
and EEG. NeuroImage, 85:432–444.
Kerous, B., Skola, F., and Liarokapis, F. (2017). EEG-based
BCI and video games: a progress report. Virtual Re-
ality.
Kilteni, K., Groten, R., and Slater, M. (2012). The Sense of
Embodiment in Virtual Reality. Presence, 21(4):373–
387.
ˇ
Skola, F. and Liarokapis, F. (2018). Embodied VR environ-
ment facilitates motor imagery brain–computer inter-
face training. Computers & Graphics, 75:59–71.
ˇ
Skola, F., Tinkov
´
a, S., and Liarokapis, F. (2019). Progres-
sive Training for Motor Imagery Brain-Computer In-
terfaces Using Gamification and Virtual Reality Em-
bodiment. Frontiers in Human Neuroscience, 13:329.
Kondo, T., Saeki, M., Hayashi, Y., Nakayashiki, K., and
Takata, Y. (2015). Effect of instructive visual stimuli
on neurofeedback training for motor imagery-based
brain-computer interface. Human Movement Science,
43:239–249.
Kosmyna, N. and L
´
ecuyer, A. (2017). Designing Guiding
Systems for Brain-Computer Interfaces. Frontiers in
Human Neuroscience, 11.
Longo, M. R., Sch
¨
u
¨
ur, F., Kammers, M. P. M., Tsakiris,
M., and Haggard, P. (2008). What is embodiment? A
psychometric approach. Cognition, 107(3):978–998.
Lotte, F., Bougrain, L., and Clerc, M. (2015). Electroen-
cephalography (EEG)-Based Brain–Computer Inter-
faces. Wiley Encyclopedia of Electrical and Electron-
ics Engineering.
Lotte, F., Larrue, F., and Muehl, C. (2013). Flaws in cur-
rent human training protocols for spontaneous Brain-
Computer Interfaces: lessons learned from instruc-
tional design. Frontiers in Human Neuroscience,
7:568.
Meehan, M., Insko, B., Whitton, M., and Brooks, Jr., F. P.
(2002). Physiological Measures of Presence in Stress-
ful Virtual Environments. In Proceedings of the 29th
Annual Conference on Computer Graphics and Inter-
active Techniques, SIGGRAPH ’02, pages 645–652,
New York, NY, USA. ACM.
M
¨
uhl, C., Allison, B., Nijholt, A., and Chanel, G. (2014). A
survey of affective brain computer interfaces: princi-
ples, state-of-the-art, and challenges. Brain-Computer
Interfaces, 1(2):66–84.
Salisbury, D. B., Dahdah, M., Driver, S., Parsons, T. D.,
and Richter, K. M. (2016). Virtual reality and brain
computer interface in neurorehabilitation. Proceed-
ings (Baylor University. Medical Center), 29(2):124–
127.
ˇ
Skola, F. (2020). Reducing the motor imagery brain-
computer interface training time with embodiment in
virtual reality.
Slater, M. (2009). Place illusion and plausibility can lead to
realistic behaviour in immersive virtual environments.
VISIGRAPP 2022 - 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications
16

Philosophical Transactions of the Royal Society B: Bi-
ological Sciences, 364(1535):3549–3557.
Sollfrank, T., Ramsay, A., Perdikis, S., Williamson, J.,
Murray-Smith, R., Leeb, R., Mill
´
an, J., and K
¨
ubler, A.
(2016). The effect of multimodal and enriched feed-
back on SMR-BCI performance. Clinical Neurophys-
iology, 127(1):490–498.
Vourvopoulos, A. and Berm
´
udez i Badia, S. (2016). Motor
priming in virtual reality can augment motor-imagery
training efficacy in restorative brain-computer interac-
tion: a within-subject analysis. Journal of NeuroEngi-
neering and Rehabilitation, 13:69.
Vourvopoulos, A., Pardo, O. M., Lefebvre, S., Neureither,
M., Saldana, D., Jahng, E., and Liew, S.-L. (2019). Ef-
fects of a Brain-Computer Interface With Virtual Re-
ality (VR) Neurofeedback: A Pilot Study in Chronic
Stroke Patients. Frontiers in Human Neuroscience, 13.
Reducing Brain-computer Interaction Training Time with Embodied Virtual Avatar
17
