
Genetic Programming based Algorithm for HW/SW Cosynthesis of
Distributed Embedded Systems Specified using Conditional Task
Graph
Adam Górski and Maciej Ogorzałek
Department of Information Technologies, Jagiellonian University in Cracow,
Prof. Stanisława Łojasiewicza 11, Cracow, Poland
Keywords: Embedded Systems, Architecture, Hardware/Software Co-Synthesis, Conditional Task Graph, Genetic
Programming.
Abstract: In this paper we propose a novel genetic programming based iterative improvement approach for
hardware/software cosynthesis of distributed embedded systems. Unlike other genetic programming solutions
for distributed embedded systems in this work the system is specified using conditional task graph. In such
a graph every node represents a single task. The edge represents amount of data needed to be transferred
between connected tasks, however some of the edges can be conditional. The data is transferred using those
edges only if condition is satisfied. Proposed methodology is based on genetic programming. Therefore the
genotype is a system construction tree. In each nodes of the tree are system building options. The next
generations are obtained using standard genetic operators: mutation, crossover, cloning and selection.
1 INTRODUCTION
Embedded systems can be found everywhere. For
example: in modern cars (Srovnal, Machacek, Hercik,
Slaby and Srovnal, 2010), drones (Yoon, Anwar,
Rakshit and Raychowdhury 2019), autonomous
robots (Vaidyanathan, Sharma and Trahan, 2021) and
many others. Many of such systems have distributed
architecture.
De Micheli and Gupta (De Micheli and Gupta
1997) separated embedded system design process on
three phases: modelling, implementation and
validation. Górski and Ogorzałek added another
phase to this process: assignment of unexpected tasks
(Górski and Ogorzałek 2016).
Co-synthesis process (Yen and Wolf 1995)
generates the architecture of embedded system. The
process include hardware allocation, task assignment
and task scheduling.
Co-synthesis methods can be divided on
constructive and iterative improvement solutions.
Constructive solutions (Srinivasan and Jha, 1995)
build system step by step by making separate
decisions for each task. They usually have low
complexity. However such methods can easily stop in
local minima of optimizing parameters. Allowing the
algorithms to changed previous decisions (Dave,
Lakshminarayana, and Jha, 1997) increases the
complexity and the time of computation. Iterative
improvement algorithms (Oh, Ha, 2002) build system
by starting form suboptimal solution. Usually it is the
fastest architecture. Next, by making local decisions,
like allocating and deallocating resources or
reassignment of tasks, they try to improve the quality
of the system. Therefore those types of algorithms can
escape from local minima but obtained results are still
suboptimal.
Genetic algorithms (Conner, Xie, Kandemir, Link
and Dick, 2005) were also used in cosynthesis
process. They can escape from local minima but very
often provide only acceptable results in acceptable
time. Moreover the results can strongly depend on the
values of the parameters (Dick, and Jha, 1998).
Genetic programming solutions build system by
evolving the genotype which is a decision tree
(Deniziak and Górski 2008, Górski and Ogorzałek
2014a). The nodes of the tree contain system
construction options. The probabilities of choosing
the options were constant. Therefore the designer had
to establish the value of the probability for every
option. Genetic programming based adaptive
methodologies (Górski and Ogorzałek 2014b, Górski
and Ogorzałek 2017) can adapt to the environment
Górski, A. and Ogorzałek, M.
Genetic Programming based Algorithm for HW/SW Cosynthesis of Distributed Embedded Systems Specified using Conditional Task Graph.
DOI: 10.5220/0011011700003118
In Proceedings of the 11th International Conference on Sensor Networks (SENSORNETS 2022), pages 239-243
ISBN: 978-989-758-551-7; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
239
during its work by dynamically changing the
probability of using each system designing option.
However the time of computation in such methods
was increasing. Good results were obtained by using
a penalty functions for such algorithms (Górski and
Ogorzałek 2021a Górski and Ogorzałek 2021b).
One of the most popular way of representation of
embedded systems is task graph. In such a graph all
of the tasks need to be executed. However sometimes
some of the tasks needed to be executed conditionally
– only if the condition is satisfied. To solve those
situations conditional task graph can be used to
specify the behaviour of embedded systems (Eles,
Kuchciński, Peng, Doboli, Pop, 1998).
In this paper we propose a genetic programming
based method for cosynthesis of distributed
embedded systems specified using conditional task
graph. In our method the phenotype is a decision tree
consisted of system constructing options. Next
populations are created using genetic operators:
mutation, crossover, cloning and selection.
2 SPECIFICATION OF
EMBEDDED SYSTEM
Embedded system can be consisted of two kinds of
resources: Processing Elements (PEs) and
Communication Links ((CLs). PEs are responsible
for tasks execution. CLs provide communication
between connected tasks. PEs can be divided into two
groups: Programmable Processors (PPs) and
Hardware Cores (HCs). PPs can execute more than
one tasks thus they are cheaper, but slower. HCs are
dedicated to execute one task thus they are faster but
more expensive. Let’s assume that n is a number of
tasks needed to be executed, m is number of PPs, and
l is a number of CLs. The overall cost of designed
system (C
o
) can be described by the formula below:
====
++=
l
z
L
y
PCCL
n
h
l
m
k
PEo
z
kzk
ccCC
11
,
11
(1)
The algorithm searches for the system with lowest
value of C
o
that does not exceed the time constrains.
The behaviour of embedded system in our method
is described using conditional task graph G={T, E}.
In the nodes of the graph the are Tasks T
i
. The edges
E
ij
describe the amount of data that need to be sent
between two connected tasks Ti and Tj. Except an
usual edges in the graph there are conditional edges.
The data flows through the conditional edges only if
a condition is satisfied. Transmission time t
i,j
between
two connected tasks T
i
and T
j
can be calculated as
follows:
b
d
t
ji
ji
,
,
=
(2)
In the formula above d
i,j
is an amount of data
transmitted between the tasks, and b is a bandwidth
of a CL which was used to connect the PEs. If tasks
are executed by the same resource transmission time
is equal to 0.
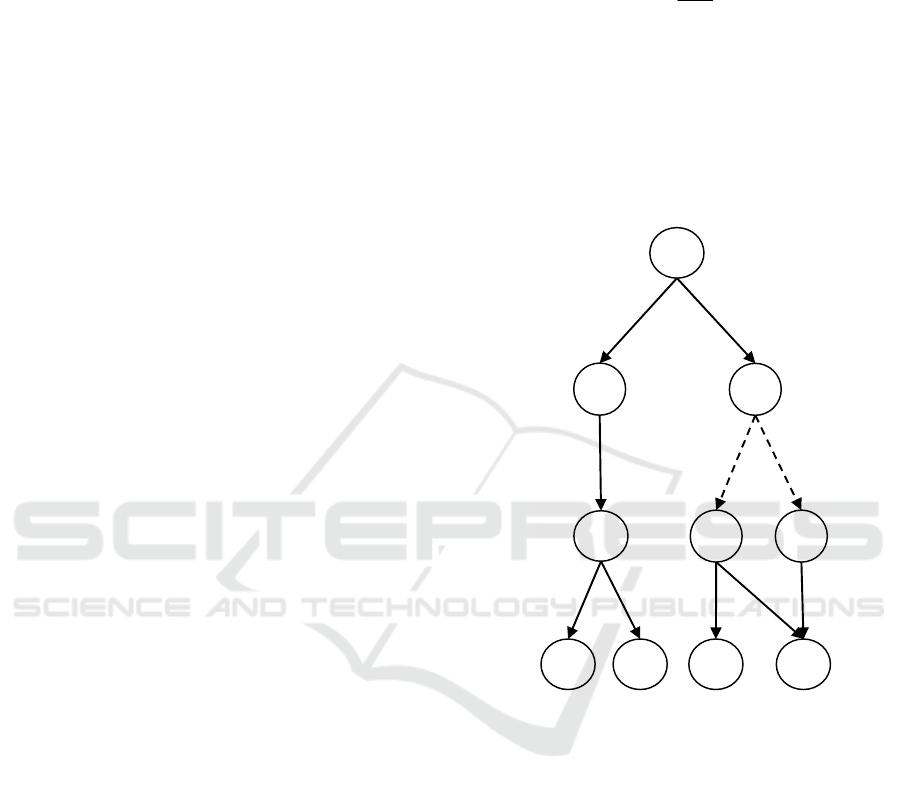
The figure 1 presents an example of a conditional
task graph.
T2
T0
T1
T4 T5
12 13
22
5 18
T8 T9
18
2
T3
T7 T6
10
5
true
false
26
Figure 1: Example of conditional task graph.
As it is presented on figure 1 the system can
execute 10 tasks: T0, T1, T2, T3, T4, T5, T6, T7, T8,
T9. The edges contain amounts of data transmitted
between tasks. For example the amount of data
transmitted between tasks T4 and T9 is equal to 5,
meanwhile amount of data transmitted between T3
and T7 is equal to 18. In the graph there are two
conditional edges: before T4 and T5. In the example
the condition of edge before T4 is equal to true and
the condition of edge before T5 is equal to false. That
means the task T5 will not be executed in the
example.
Table 1 includes example of a database for the
system described by the graph from figure 1. It
contains the values of time (t) and cost (c) of
execution of each task on every PE, and the costs of
connecting PEs to CLs.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
240
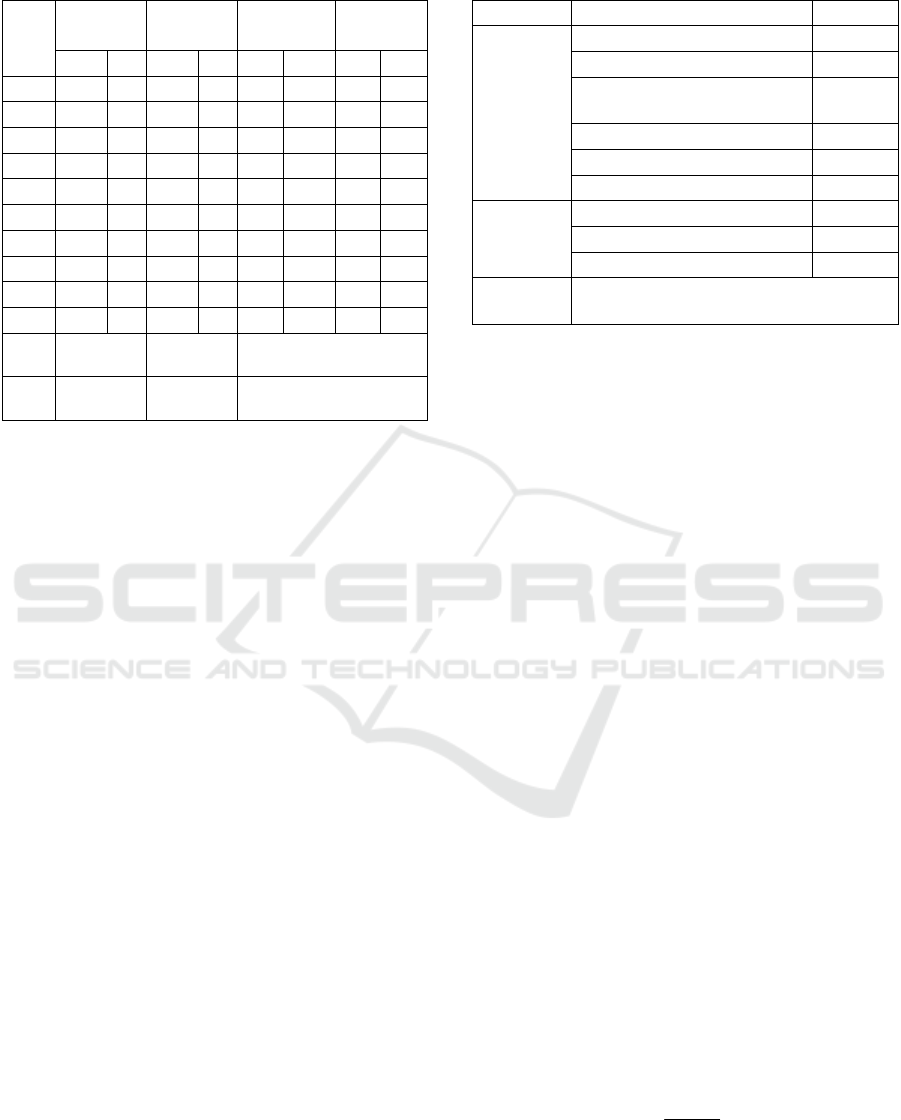
Table 1: Example of resource database.
Task
PP1
C=280
PP2
C=350
HC1 HC2
t c t c t c t c
T0 60 6 50 5 10 250 7 350
T1 56 5 44 5 8 150 6 165
T2 100 2 90 1 23 155 15 190
T3 43 8 40 6 12 98 2 160
T4 23 12 21 10 5 86 1 110
T5 120 3 100 1 15 100 11 180
T6 49 10 39 7 1 123 6 154
T7 38 15 30 14 5 106 4 176
T8 133 2 110 2 12 180 10 240
T9 34 21 42 19 4 205 3 250
CL1,
b=8
c=3 c=6 c=42
CL2,
b=9
c=5 c=8 c=56
The target system can be consisted of four types
of PEs: two types of PPs (PP1 and PP2), and two
kinds of HCs (HC1 and HC2). The cost of PP1 is
equal to 280. The cost of PP2 is equal to 350. The
processors can be connected using two kinds of CLs:
CL1 and CL2. The bandwidth of CL1 is equal to 8.
The bandwidth of CL2 is equal to 9. The cost of
connecting HCs to CL1 is equal to 42, to CL2 is equal
to 56. Cost of connecting PP1 and PP2 to CL1 is equal
to 3 and 6. The cost of connection PP1 and PP2 to
CL2 is equal to 5 and 8.
3 THE ALGORITHM
The approach we presented in this paper is
a constructive algorithm based on genetic
programming. Therefore every genotype of each
individual is a tree. Because of constructive nature of
the algorithm, structure of the genotype must be the
same as structure of conditional task graph. The first
node is an embryo. It contains the random
implementation of the first task. Every next node of
the tree contains system construction option for single
task. The options are given in table 2. The table
contains options for PEs and CLs. For each option
there is given a probability of being chosen. The
values of probability are different for each option. For
greedy options (the cheapest and the fastest
implementation) the value of probability is the
lowest. For another options the value is bigger. The
values of probability is not modified during the work
of the algorithm.
Table 2: Options for building system.
Step Option Probability
PE a. The fastest implementation 0,1
b. The cheapest implementation 0,1
c. The same as task’s
predecessor
0,2
d. The rarest used PP 0,2
e. min (t*c) 0,2
f. Idle for the longest time 0,2
CL a. The cheapest CL 0,3
b. The fastest CL 0,3
c. The rarest used 0,4
Task
scheduling
list scheduling
In the first generation П individuals are created. П
is described by the following formula:
e*n* =
α
Π
(3)
where n is a number of tasks in conditional task graph
and α is a parameter which allows the designer to
control the size of populations.
If any PP executes more than one task then those
tasks need to be scheduled. We decided to use list
scheduling to establish the order of tasks’ execution.
New individuals are created by cloning (Φ), crossover
(Ψ) and mutation (Ω) operators. The number of
generated individuals are described below by the
following formulas:
Φ = β*П
Ψ = γ*П
Ω = δ*П
In every generation there is constant number of
individuals. To make it sure the following condition
must be satisfied:
β + γ + δ = 1 (4)
To select individuals for each genetic operators
we use rank selection. After each population all of the
individuals are ranked by cost. The selection operator
selects appropriate number of genotypes for each
operator from the rank list but with different
probability (P). The probability is depended on
a position of individuals (r) in the rank list. It is
described by the following formula below:
Π
−Π
=
r
P
(5)
As it can be observed the genotypes from the top
of the list have the biggest valued of the probability.
Genetic Programming based Algorithm for HW/SW Cosynthesis of Distributed Embedded Systems Specified using Conditional Task Graph
241
The worst individuals have the lowest value of
probability but not equal to 0.
Crossover chooses Ψ individuals using selection
operator. The individuals are randomly connected in
pairs. Than the crossing point needs to be chosen. The
crossing point must be the same for both individuals
in each pair. Next subtrees are copied between chosen
solutions to create two new individuals for each pair.
Mutation selects Ω genotypes using selection
operator. Then for each solution one node is chosen
randomly. Mutation substitutes the option in the node
on another using options included in table 2.
Cloning copies Φ individuals from current
population to the next one. To not to lose the best
individual we assume that the best one (the first in the
rank list) is always copied to the next population.
If in next ε populations better solution is not
found, the algorithm will stop. All of the parameters:
α, β, γ, δ and ε are given by the designer.
4 FIRST RESULTS
To check the efficiency of presented approach we
made some experiments using randomly generated
graphs with 6, 8 and 10 nodes. The results were
compared with results obtained by greedy time
algorithm. They are presented in table 3 below. The
parameters were set as follows: α=100, β=0,2, γ=0,7,
δ=0,1, ε=5.
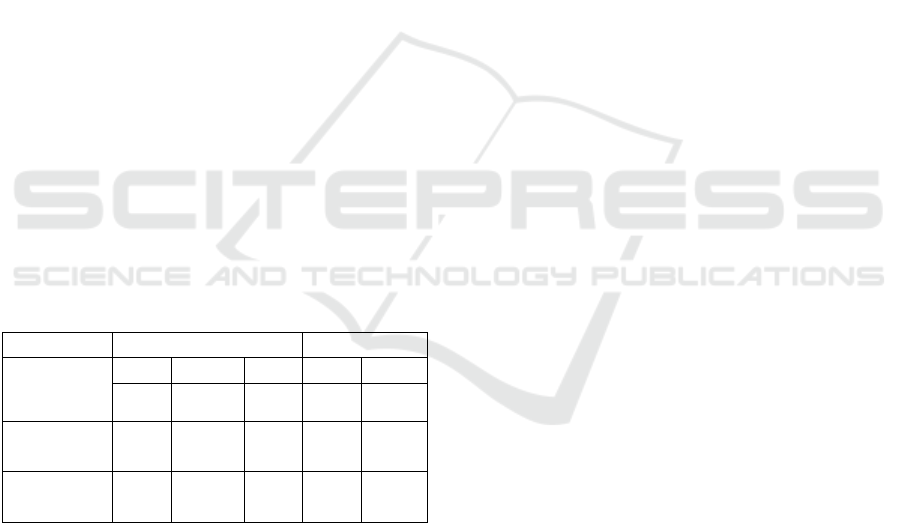
Table 3: Results of the experiments.
graph GPC greedy
6
T
max
= 1200
t c gen t c
772 783 5 547 1425
8
T
max
= 120
119 1566 5 85 1592
10
T
max
= 190
174 619 7 184 1815
In the table 3 there are values of times (t) and costs
(c) of generated systems. For an algorithm presented
in this paper it is also given a number of generation in
which the result was obtained. The time constrains
were as follows: for graph with 6 nodes – 1200, for
graph with 8 nodes – 120, and for graph with 10 nodes
– 190. As it can be observed for every graph better
results were generated by the algorithm presented in
this paper. Costs of the system described by graphs
with 6, 8 and 10 nodes were as follows: 783, 1566,
619 for algorithm GPC and 1425, 1592 and 1815 for
greedy solution.
5 CONCLUSIONS AND FUTURE
WORK
In this work a novel GP-based algorithm for
cosynthesis of embedded systems specified by
conditional task graph was presented. Unlike other
GP-based algorithms for HW/SW cosynthesis in this
paper we investigate the situation when in task graph
exist some conditional edges.
The results presented in this paper are first
obtained results by described method. To establish
the quality of the results well they need to be
compared with other known algorithms for HW/SW
cosynthesis of distributed embedded systems
specified by conditional task graphs. It is also
important to compare the algorithms using bigger
graphs.
In the future we plan to modify the algorithm by
using another system construction options or another
genetic operators. We also plan to modify the
probability of choose of each options. Especially we
would like to provide a version of the algorithm
which will be able to change the probability
dynamically during the work of the algorithm. We
would like to develop an iterative improvement GP-
based solution for cosynthesis of embedded systems
specified by conditional task graph too. It is also
important to check the influence of penalty function
for described algorithm on a quality of the results.
REFERENCES
Srovnal V. Jr, Machacek, Z. Hercik, R., Slaby, R., Srovnal,
V., 2010. Intelligent car control and recognition
embedded system. In Proceedings of the International
Multi- conference on Computer Science and
Information Technology, pp. 831–836.
Yoon I., Anwar A., Rakshit T., Raychowdhury A., 2019.
Transfer and online reinforcement learning in STT-
Mram based embedded systems for autonomous
drones. In 2019 Design, Automation & Test in Europe
Conference & exhibition (DATE)., pp.1489-1494,
IEEE.
Vaidyanathan, R., Sharma,, G and Trahan, J., 2021. On fast
pattern formation by autonomous robots. Information
and Computation, 104699, Elsevier.
De Micheli, G., Gupta, R., 1997. Hardware/software
co-design. In Proceedings IEEE 95.3 (Mar). IEEE.
Górski, A., Ogorzałek, M.J., 2016. Assignment of
unexpected tasks in embedded system design process.
Microprocessors and Microsystems, Vol. 44,
pp. 17-21, Elsevier.
Yen, T., Wolf, W., 1995. Sensivity-Driven Co-Synthesis of
Distributed Embedded Systems. In Proceedings of the
International Symposium on System Synthesis.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
242

Srinivasan, S., Jha, N.K., 1995. "Hardware-Software Co-
Synthesis of Fault-Tolerant Real-Time Distributed
Embedded Systems", In Proceedings European Design
Automation Conference. pp. 334-339.
Dave, B., Lakshminarayana, G., Jha, N., 1997. COSYN:
Hardware/software Co-synthesis of Embedded
Systems. In Proceedings of the34th annual Design
Automation Conference (DAC’97).
Oh, H., Ha, S., 2002. Hardware-software cosynthesis of
multi-mode multi-task embedded systems with real-
time constraints. In Proceedings of the International
Workshop on Hardware/Software Codesign,
pp. 133–138 .
Conner, J., Xie, Y., Kandemir, R., Link, G., Dick, R., 2005.
FD-HGAC: AHybrid Heuristic/Genetic Algorithm
Hardware/Software Co-synthesis Framework with
Fault Detection. In Proceedings of Asia South Pacific
Design Automation Conference (ASP-DAC), pp. 709-
712.
Dick, R., P., Jha, N., K., 1998. MOGAC: a multiobjective
Genetic algorithm for the Co-Synthesis of
Hardware-Software Embedded Systems. In IEEE
Trans. on Computer Aided Design of Integrated
Circiuts and systems, vol. 17, No. 10.
Deniziak, S., Górski, A., 2008. Hardware/Software Co-
Synthesis of Distributed Embedded Systems Using
Genetic programming. In Proceedings of the 8th
International Conference Evolvable Systems: From
Biology to Hardware, ICES 2008. Lecture Notes in
Computer Science, Vol. 5216. SPRINGER-VERLAG.
Górski, A., Ogorzałek, M.J., 2014a. Adaptive GP-based
algorithm for hardware/software co-design of
distributed embedded systems. In Proceedings of the
4th International Conference on Pervasive and
Embedded Computing and Communication Systems,
Lisbon, Portugal.
Górski, A., Ogorzałek, M.J., 2014b. Iterative improvement
methodology for hardware/software co-synthesis of
embedded systems using genetic programming. In
Proceedings of the 11th Conference on Embedded
Software and Systems (Work in Progress Session),
Paris, France.
Górski, A., Ogorzałek, M.J., 2017. Adaptive iterative
improvement GP-based methodology for HW/SW co-
synthesis of embedded systems. In Proceedings of the
7th International Joint Conference on Pervasive and
Embedded Computing and Communication Systems,
Madrid, Spain.
Górski, A., Ogorzałek, M.J., 2021a. Genetic Programming
based Constructive Algorithm with Penalty Function
for Hardware/Software Cosynthesis of Embedded
Systems. In Proceedings of the 16th International
Conference on Software Technologies (ICSOFT 2021),
pp. 583-588.
Górski, A., Ogorzałek, M.J., 2021b. Genetic Programming
based Iterative Improvement Algorithm for HW/SW
Cosynthesis of Distributted Embedded Systems. In
Proceedings of the 10th International Conference on
Sensor Networks (SENSORNETS 2021), pp. 120-125.
Eles P., Kuchciński K., Peng Z., Doboli A., Pop P., 1998.
Scheduling of conditional process graphs for the
synthesis of embedded systems. In Proceedings of
Design Automation and Test in Europe), pp. 23-26.
Genetic Programming based Algorithm for HW/SW Cosynthesis of Distributed Embedded Systems Specified using Conditional Task Graph
243
