
Two-phase Kernel Search: An Application to Facility Location Problems
with Incompatibilities
Renata Mansini
a
and Roberto Zanotti
b
Department of Information Engineering, University of Brescia, Italy
Keywords:
Single-source Capacitated Facility Location Problem, Multi-source Capacitated Facility Location Problem,
Incompatibilities, Kernel Search.
Abstract:
Among the most important variants of the capacitated facility location problem are those introducing side
constraints. In the present paper, we analyze the introduction of incompatibility constraints in the single- and
multi-source capacitated facility location problems. We deal with two different types of conflict that concern:
(i) the incompatibility among customers when jointly served by the same facility and (ii) the conflict among
facilities. We study their mathematical formulations and solve them by means of a two-phase variant of
the general-purpose framework Kernel Search. The method, evaluated on benchmark instances, shows to be
extremely effective getting better results than Gurobi when solving the models with a time limit of one hour.
Interesting managerial insights are also drawn on optimal solutions, when available.
1 INTRODUCTION
The problem of the facility location and customers as-
signment represents one of the main issues in the or-
ganization of distribution systems in large industrial
companies. The number and relative geographical po-
sition of selected facilities is also strongly related to
the quality of the services provided to customers. Lo-
cation models find application in several contexts and
possibly include different side constraints as well as
single- or multi-objective functions. For a classifica-
tion of facility location problems, interested readers
can refer to (Hamacher and Nickel, 1998), (Klose and
Drexl, 2005), and (Fern
´
andez and Landete, 2015).
In the Single-Source Capacitated Facility Loca-
tion Problem (SSCFLP), a set M = {1, ..., m} of cus-
tomers, each one with a nonnegative demand d
i
, i ∈
M, has to be served by a set N = 1, ..., n of suppliers
(facilities) in such a way that each customer i ∈ M is
assigned to exactly one facility j ∈ N, satisfying its
whole demand. The total amount of customers’ de-
mand allocated to a facility j cannot exceed its posi-
tive capacity s
j
, j ∈ N. Without loss of generality, it is
assumed that
∑
j∈N
s
j
≥
∑
i∈M
d
i
. Each facility j ∈ N
has a set-up cost f
j
that has to be paid if at least one
customer is served by it. Furthermore, if customer i
a
https://orcid.org/0000-0002-2194-0339
b
https://orcid.org/0000-0002-3073-4895
is assigned to facility j a proportional unitary cost c
i j
has to be paid. The problem aims to minimize the to-
tal cost of opening the facilities and supply all the cus-
tomers. The assumption that forces each customer to
be served by exactly one facility (single-source) can
be relaxed by allowing that a customer can be served
by more than one supplier (multi-source).
Despite the extensive literature existing on facility
location problems, very few contributions introduce
conflicts. In this paper, we study two different types
of conflict, both motivated by real applications: (i) in-
compatibilities among facilities; (ii) incompatibilities
among customers when served by the same facility.
We solve and compare these two different conflict-
based formulations by using a new variant of Kernel
Search (KS). The method belongs to the class of the
general purpose methods and can be used to solve
mixed integer linear programming problems. Initially
applied to the multidimensional knapsack problem
(Angelelli et al., 2010) and to a portfolio selection
problem (Angelelli et al., 2012), KS is based on the
sequential solution of restricted problems by means
of a mixed integer programming (MIP) solver. Re-
stricted problems are constructed by selecting prede-
fined subsets of the decision variables while setting
to zero the remaining ones. The method identifies
a set of more promising variables, called kernel set,
and partitions the remaining ones into groups, called
buckets. To construct the kernel set and the buck-
Mansini, R. and Zanotti, R.
Two-phase Kernel Search: An Application to Facility Location Problems with Incompatibilities.
DOI: 10.5220/0011008100003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 105-111
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
105

ets, variables are sorted so that the most promising
ones come first. A variable is promising when its
likelihood to take a value different from zero in an
optimal integer solution is high. To estimate such a
value the method makes use of information provided
by the Linear Programming (LP) relaxation optimal
solution. The higher the value of a variable in the
LP relaxation, the higher the probability it will take a
positive value in the optimal integer solution as well.
Moreover, variables taking value equal to zero in the
LP relaxation are sorted in non-decreasing order of
their absolute reduced cost values. Restricted prob-
lems are constructed by iteratively considering the
variables in the kernel set plus the variables belong-
ing to the current bucket. When solving a restricted
problem, the variables belonging to the bucket that
are selected in the corresponding solution enter the
kernel set. The rationale is to adaptively change the
kernel set, hopefully identifying all the variables tak-
ing part in the optimal solution. The iterative variant
of the KS allows to work over the sequence of buckets
more than once. At each bucket iteration, the sorting
of variables, the size of the buckets, and the construc-
tion of the kernel set are possibly modified.
KS has been recently applied in different applica-
tion contexts including vehicle routing (Hanafi et al.,
2020) and knapsack problems (Lamanna et al., 2022).
The main contribution of this paper is the anal-
ysis of facility location problems with conflicts and
their solution with a two-phase Kernel Search. Math-
ematical formulations of single- and multi-source ca-
pacitated facility location problems with both types of
incompatibilities are solved on benchmark instances.
The results found by the two-phase KS are compared
with the solutions obtained by solving the mathe-
matical formulations by means of a commercial MIP
solver (Gurobi).
The paper is organized as follows. In Section 2,
we analyze the existing literature on problems with
conflicts with a special focus on the facility location
ones. In Section 3, the mathematical formulation of
both single- and multi-source capacitated facility lo-
cation problems along with the introduction of incom-
patibilities constraints are provided. The solution al-
gorithm is presented in Section 4, whereas computa-
tional results on a set of benchmark instances are ana-
lyzed in Section 5. Concluding remarks are provided
in Section 6.
2 LITERATURE REVIEW
Given their practical relevance, facility location prob-
lems have been largely studied in the literature. Sev-
eral solution approaches have been proposed, both
exact and heuristic. For the SSCFLP, several suc-
cessful heuristics have been proposed as in (Ahuja
et al., 2004), (Chen and Ting, 2008), and (Ho, 2015).
A heuristic for large-scale SSCFLP is presented in
(Oliveira et al., 2020). Interesting exact approaches
have also been introduced, such as the Branch-and-
Cut-and-Price presented in (Avella and Boccia, 2009)
or the three-phase cut-and-solve algorithm in (Gade-
gaard et al., 2018). There is also a considerable
body of work on the MSCFLP. For example, we can
mention the application of Benders Decomposition in
(Fischetti et al., 2016), or the new valid inequalities
introduced in (Avella et al., 2021).
Despite the intense research effort devoted to
these problems, their variants taking into account con-
flicts have received a limited attention in the litera-
ture. To the best of our knowledge, only the paper
by (Mar
´
ın and Pelegr
´
ın, 2019) deals with incompat-
ibilities in a facility location problem. In particular,
they consider the Uncapacitated Single-Source Facil-
ity Location Problem in which each customer has the
same demand. They reformulate the problem as a
set packing problem and introduce several valid in-
equalities that are exploited in a custom Branch-and-
Cut. In general, incompatibility constraints have re-
ceived a considerable amount of attention in the last
few years, and several examples can be found in the
scientific literature under different names such as neg-
ative disjunctive constraints, conflicts, or exclusion-
ary side constraints. For instance, there are applica-
tions in the context of transportation problems, where
pairs of suppliers are incompatible when serving the
same customer (Goossens and Spieksma, 2009), in
horizontal collaboration among carriers and shippers
where transportation lanes cannot include incompati-
ble goods such as food and chemicals (Colombi et al.,
2017), knapsack problems (Bettinelli et al., 2017),
and max-flow problems (S¸uvak et al., 2020).
3 THE MATHEMATICAL
FORMULATIONS
We first introduce the basic SSCFLP and the
MSCFLP and then describe the additional constraints
needed to formulate the incompatibility constraints.
3.1 Basic Formulation
We model the basic SSCFLP by means of two sets of
variables. In the first set, binary variable x
i j
, i ∈ M, j ∈
N, is equal to 1 if customer i is assigned to facility j,
and zero otherwise. In the second set, binary variable
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
106

y
j
, j ∈ N, takes value equal to 1 if facility j has been
opened and zero otherwise.
(SSCFLP) min
∑
i∈M
∑
j∈N
c
0
i j
x
i j
+
∑
j∈N
f
j
y
j
(1)
subject to:
∑
i∈M
d
i
x
i j
≤ s
j
y
j
j ∈ N (2)
∑
j∈N
x
i j
= 1 i ∈ M (3)
x
i j
∈ {0, 1} i ∈ M, j ∈ N (4)
y
j
∈ {0, 1} j ∈ N (5)
Objective function (1) minimizes the total cost as sum
of set-up and assignment costs, the latter computed by
multiplying the unitary cost for the total quantity re-
quired by a customer, i.e. , c
0
i j
= c
i j
d
i
, i ∈ M, j ∈ N.
Constraints (2) impose that the total demand from
customers assigned to a facility should be lower than
or equal to its capacity. Assignment Constraints (3)
establish that the demand of each customer is supplied
by exactly one facility. The remaining are binary con-
ditions on variables.
To this formulation, one can easily add the follow-
ing valid inequalities:
x
i j
≤ y
j
i ∈ M, j ∈ N (6)
∑
j∈N
s
j
y
j
≥ D j ∈ N (7)
where D =
∑
i∈M
d
i
.
In the multi-source variant, binary variables x
i j
are
substituted with continuous variables X
i j
to specify
quantities assigned by a facility to customers as fol-
lows:
(MSCFLP) min
∑
i∈M
∑
j∈N
c
i j
X
i j
+
∑
j∈N
f
j
y
j
(8)
subject to:
∑
i∈M
X
i j
≤ s
j
y
j
j ∈ N (9)
∑
j∈N
X
i j
≥ d
i
i ∈ M (10)
X
i j
≥ 0 i ∈ M, j ∈ N (11)
y
j
∈ {0, 1} j ∈ N (12)
It is worth noticing that, given a set of open facili-
ties, the SSCFLP results in a set partitioning problem,
whereas the MSCFLP boils down to a transportation
problem, which can be easily solved to optimality.
3.2 Incompatibility Constraints
Nowadays, many company offer services alongside
produced items (servitization). For example, a manu-
facturer may provide equipment spare parts to cus-
tomers to ease repair and maintenance activities.
There are also more advanced kinds of servitization
that include, for instance, the provision of continu-
ous after-sales services of possibly different nature.
Customers that require advanced services are usually
more demanding than other customers. To guarantee
a high level of customer’s satisfaction, the company
prefers to impose an incompatibility among demand-
ing customers when served by the same facility. We
identify this type of conflict as customers incompati-
bility and indicates that, if two customers are incom-
patible, they cannot be jointly served by the same fa-
cility.
There is also another type of conflict related to the
geographical position of facilities. If the location of
two plants is quite close, the company might consider
the two facilities as incompatible and decide to open
only one of the two. We call this type of conflict fa-
cilities incompatibility.
To model incompatibilities, we define two con-
flict graphs I = (M, E) with e = (i, k) ∈ E if and
only if customers i and k, i 6= k, are incompatible
and thus cannot be assigned to the same facility and
I
0
= (N, E
0
) with e
0
= ( j, q) ∈ E
0
if and only if facil-
ities j and q, j 6= q, are incompatible (too close) and
thus cannot be both opened.
In formulation SSCFLP, customers incompatibil-
ity can be dealt with by adding the following con-
straints:
x
i j
+ x
k j
≤ 1 (i, k) ∈ E (13)
The corresponding constraints in formulation
MSCFLP require the introduction of an additional set
of binary variables z
i j
, taking value 1 if customer i is
assigned to facility j and zero otherwise, as follows:
X
i j
≤ d
i
z
i j
i ∈ M, j ∈ N (14)
z
i j
+ z
k j
≤ 1 (i, k) ∈ E (15)
Facilities incompatibility are formalized in both
models SSCFLP and MSCFLP as follows:
y
j
+ y
q
≤ 1 ( j, q) ∈ E
0
. (16)
4 KERNEL SEARCH
To solve capacitated facility location problems with
incompatibilities, we have implement a solution ap-
proach based on the sequential run of two sepa-
rated KS algorithms (Two-Phase Kernel Search). The
method is partially inspired by the one proposed in
(Lamanna et al., 2022) for the solution of the mul-
tidimensional multiple-choice knapsack problem, but
Two-phase Kernel Search: An Application to Facility Location Problems with Incompatibilities
107

with some relevant differences. In that approach, the
first phase of the method solves a KS with the aim to
collect statistics on the solved restricted problems and
use them to dynamically set the parameters value (size
of the buckets, solution time) of the second phase KS.
In our method, the first phase is mainly focused on
finding a good feasible solution rather than in collect-
ing information, whereas the second phase works on
smaller restricted problems to refine the search.
We briefly describe the two phases and their
main features. The pseudocode of Two-Phase Ker-
nel Search is presented in Algorithm 1. In both
phases, the implemented Kernel Search is iterative
since buckets are scrolled more than once. The num-
ber of bucket iterations computed by each KS in the
two phases depends on the total time assigned to each
phase. Given T
max
the total time assigned to the
method as stopping rule, we have decided to allocate
a percentage γ of T
max
to the first phase and the re-
maining (1 − γ)T
max
time to the second one.
4.1 First Phase Kernel Search
In this phase, the KS constructs a restricted number
of buckets with a quite large size (b
1
). Since buckets
are scrolled more than once, at each bucket iteration
their size is reduced by an amount equal to ∆
1
. More-
over, since restricted problems might be quite large,
a time limit t
1
is assigned to the solution of each of
them. When creating subproblems by using informa-
tion provided by the optimal solution of the problem
continuous relaxation (SOLVELPRELAXATION), the
method deals separately with the variables associated
with facilities (variables y) with respect to variables
for customers assignment (variables x or X according
to the variant). In particular, procedure BUILDKER-
NELSET constructs the initial kernel set by adding all
y variables, while only the x variables that have been
activated in the optimal solution of the LP relaxation
are included. The remaining x variables are equally
divided among the buckets depending on the facility
they are associated with. More precisely, facilities are
sorted in descending order of the sum of the values
taken by the associated x variables in the LP relax-
ation. All the facilities that have not been selected
in the optimal solution of the LP relaxation are then
sorted in ascending order of reduced costs. Then, a
certain number of x variables for each facility is added
to each bucket depending on the position of the cor-
responding y variable in the ranking. A higher rank-
ing corresponds to more variables added in the initial
buckets, while a low ranking will result in almost no
variables added to the initial buckets. Once the initial
number of variables to be added to the initial bucket is
established, such value linearly increases (decreases)
in the following ones (procedure BUILDBUCKETS).
For example, if we decide to create 5 buckets, the best
positioned facility will have 40% of its x variables in
the first bucket, 30% in the second one, and so on,
with no such variables in the last one. The worst po-
sitioned facility will have the opposite distribution.
At Line 14 of Algorithm 1, the current restricted
problem (constructed by eliminating all variables
but those in the current bucket B and in the up-
dated kernel set
¯
Λ) is solved by means of proce-
dure SOLVE(Inst,
¯
Λ∪B, [x
∗
, y
∗
],t) that calls the MIP
solver at hand to find an integer solution (possibly the
optimal one) within a time limit equal to t. A cut-
off constraint on the objective function value is also
added to the restricted problem formulation. Such a
cut-off is computed through the incumbent integer so-
lution [x
∗
, y
∗
] received in input. The procedure pro-
vides as output a possibly new incumbent solution
[x
ILP
, y
ILP
] and the set of variables
¯
S belonging to the
current bucket to be added to the kernel set (Line 18).
At each bucket iteration, the kernel set is
updated (see Line 24), by means of procedure
UPDATEKERNELSET, that takes into account the
variables of the best integer solution found so far
([x
∗
, y
∗
]), plus all the variables included in the initial
kernel set (Λ).
Notice that all the time the incumbent integer so-
lution is updated a VARIABLEFIXING procedure tries
to fix at optimality as many variables as possible by
making use of the classical fixing procedures based on
comparing the absolute reduced cost values to the gap
between the optimal continuous relaxation value and
the value of a feasible solution (further details about
these fixing rules can be found in (Mansini and Zan-
otti, 2020)).
4.2 Second Phase Kernel Search
The second phase is focused on refining the search.
The corresponding KS builds double the number of
buckets with respect to the first phase. The result-
ing buckets have a smaller bucket size b
2
and are
increased by ∆
2
< ∆
1
at each bucket iteration. The
initial kernel set consists of all the variables corre-
sponding to the incumbent integer solution plus all the
variables included in the initial kernel set of the first
phase. In this phase, when a bucket iteration ends, the
kernel set is not updated and keeps all the variables
acquired throughout the iteration.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
108
Algorithm 1: TWO-PHASE KS(Inst, T
max
).
1: Initialize parameters (b
1
, ∆
1
,t
1
), (b
2
, ∆
2
,t
2
), γ
2: ([x
LP
, y
LP
], r
LP
, z
LP
) ← SOLVELPRELAXATION(Inst)
3: Λ ← BUILDKERNELSET(Inst, [x
LP
, y
LP
], r
LP
)
4:
¯
Λ ← Λ
5: phase
1
← true
6: T
1
max
← γ ·T
max
7: (b, ∆, t) ← (b
1
, ∆
1
,t
1
)
8: ([x
∗
, y
∗
], z
∗
,
¯
S, t
el a psed
) ← SOLVE(Inst, Λ, [
/
0,
/
0],t)
9: VARIABLEFIXING(z
∗
, z
LP
, [x
LP
, y
LP
], r
LP
)
10: while t
el a psed
< T
max
do
11: B ← BUILDBUCKETS(N \
¯
Λ, b)
12: for all B ∈ B do
13: t ← min(t, T
max
−t
el a psed
)
14: ([x
I LP
, y
I LP
], z
I LP
,
¯
S, t
used
) ← SOLVE(Inst,
¯
Λ ∪B, [x
∗
, y
∗
],t)
15: t
el a psed
← t
el a psed
+t
used
16: if [x
I LP
, y
I LP
] 6= [x
∗
, y
∗
] then
17: ([x
∗
, y
∗
], z
∗
) ← ([x
I LP
, y
I LP
], z
I LP
)
18:
¯
Λ ←
¯
Λ ∪
¯
S
19: VARIABLEFIXING(z
∗
, z
LP
, [x
LP
, y
LP
], r
LP
)
20: end if
21: end for
22: b ← b + ∆
23: if phase
1
= true then
24:
¯
Λ ← UPDATEKERNELSET(Λ, [x
∗
, y
∗
])
25: end if
26: if t
el a psed
≥ T
1
max
and phase
1
= true then
27: (b, ∆,t) ← (b
2
, ∆
2
,t
2
)
28: phase
1
← f alse
29: t ← min(t, T
max
−t
el a psed
)
30: ([x
∗
, y
∗
], z
∗
,
¯
S, t
used
) ← SOLVE(Inst,
¯
Λ, [x
∗
, y
∗
],t)
31: t
el a psed
← t
el a psed
+t
used
32: end if
33: end while
34: return ([x
∗
, y
∗
], z
∗
)
5 COMPUTATIONAL RESULTS
The proposed algorithm has been tested on bench-
mark instances constructed by using the data set
TBED1 defined in (Avella and Boccia, 2009) to which
a conflict graph has been added to model incompati-
bilities as in (Mar
´
ın and Pelegr
´
ın, 2019). More pre-
cisely, we have taken the first 5 instances of the set
i300 consisting of 300 facilities and 300 customers.
The incompatibility graphs I and I
0
have been gener-
ated by assuming a density equal to 5%.
The two-phase KS has been coded in Java, and
computational results have been run on an Intel i7-
5930K machine running a 64-bit Windows 10 operat-
ing system, 6 cores, and 64GB of RAM. The math-
ematical formulations as well as the restricted prob-
lems in the solution algorithms have been solved by
means of Gurobi 9.1.2.
In the following, we analyze the results obtained
when solving the SSCFLP and the MSCFLP with
both types of incompatibilities. Some interesting in-
sights on the impact of the different type of conflicts
on the total costs are drawn by considering the opti-
mal solution of the problems without incompatibili-
ties.
5.1 Single-source CFLP with
Incompatibilities
In Table 1, we show the results obtained by the SS-
CFLP with incompatibilities among customers (C-
INC) and among facilities (F-INC). We compare the
solutions obtained by Gurobi with our Two-phase KS.
The first has been running for one hour, whereas the
time limit for the heuristic procedure has been set to
15 minutes. Column ”Obj” reports the objective func-
tion value found by each method, ”#fac” indicates the
number of facilities opened out of the 300 available,
whereas ”ttb” provides the time to best, i.e. the time
required to find the solution provided as output. Col-
umn ”gap(%)” provides the optimality gap achieved
by Gurobi, while column ”err(%)” provides the per-
centage error of the solution found by Two-Phase KS
with respect to the solution obtained by Gurobi. A
negative value indicates that our heuristic framework
has been able to find a better solution value with re-
spect to Gurobi.
Interesting enough the time to best of Gurobi is
on average quite high and in some cases almost equal
to the CPU time of 1 hour indicating that these are
not easy instances to solve at optimality. On the con-
trary, column ttb for the Two-Phase KS shows that
the method is able to achieve good quality solutions
in a relatively short amount of time, since the average
value stays below 800 seconds. In general, Two-phase
KS is able to improve the solution found by Gurobi
in 8 out of 10 instances. It is quite clear that in-
stances that include F-INC are more difficult to solve
for Gurobi, given the fact that the optimality gap is
relatively large (2.55% on average vs 0.68% in the
C-INC case). Frequently, Two-Phase KS is able to
improve Gurobi’s solution by a considerable margin
(-0.97% on average, which corresponds to hundreds
of units of cost). Interesting enough, in the F-INC
case, the solutions found by Two-phase KS open, on
average, slightly more facilities.
5.2 Multi-source CFLP with
Incompatibilities
Differently from the single-source variant, all the in-
stances for the MSCFLP with both types of incompat-
ibilities have been solved by Gurobi to optimality in a
limited amount of time taking on an average 284 sec-
onds and never more than 454 seconds. In all these in-
Two-phase Kernel Search: An Application to Facility Location Problems with Incompatibilities
109
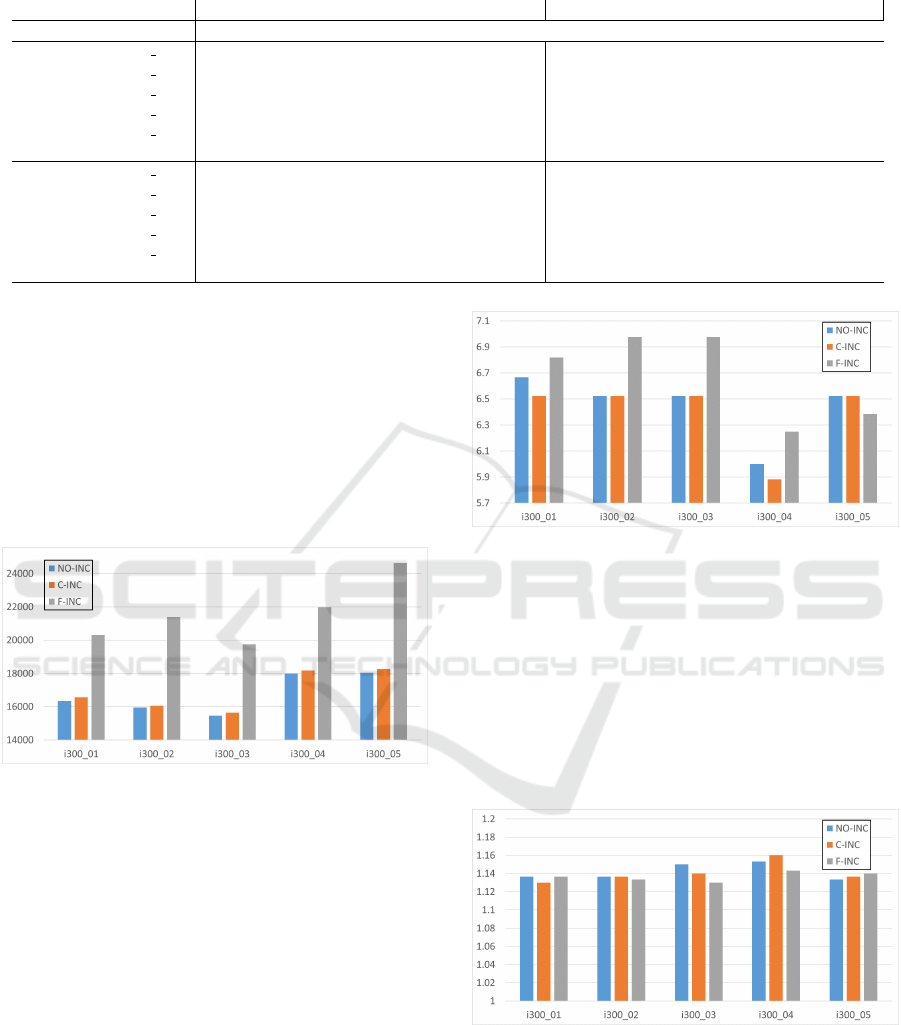
Table 1: Gurobi (1 h) vs. Two-Phase KS (15 min).
Gurobi Two-Phase KS
Variant Instance Obj # fac ttb gap(%) Obj # fac ttb err(%)
C-INC i300 01 16839.29 45 2590 0.52% 16794.99 45 763 -0.26%
i300 02 16362.08 46 1073 0.93 16356.64 46 592 -0.03
i300 03 15878.44 46 3600 0.61 15890.07 46 844 0.07
i300 04 18503.27 52 2240 0.73 18447.75 51 864 -0.30
i300 05 18521.48 46 2708 0.59 18533.73 47 895 0.07
Avg 17220.91 47 2442.2 0.68 17204.64 47 791.6 -0.09
F-INC i300 01 20531.57 41 1002 0.56% 20529.72 42 598 -0.01%
i300 02 22001.72 43 3035 2.88 21586.98 43 754 -1.89
i300 03 20147.43 44 1679 1.66 19935.44 43 781 -1.05
i300 04 22708.38 47 832 2.74 22409.77 48 793 -1.31
i300 05 25459.91 46 3513 4.91 25309.02 47 849 -0.59
Avg 22169.8 44.2 2012.2 2.55 21954.19 44.6 755 -0.97
stances, two-phase KS analyzes only a bunch of buck-
ets in the first phase, always finding the optimal solu-
tion in a computational time reasonably lower than
the one required by the MIP solver.
For this reason, we do not report detailed results
on these computationally easy instances. Neverthe-
less, being all the optimal solutions available, we
can draw some managerial insights on the impact, in
terms of costs, of the presence of conflicts.
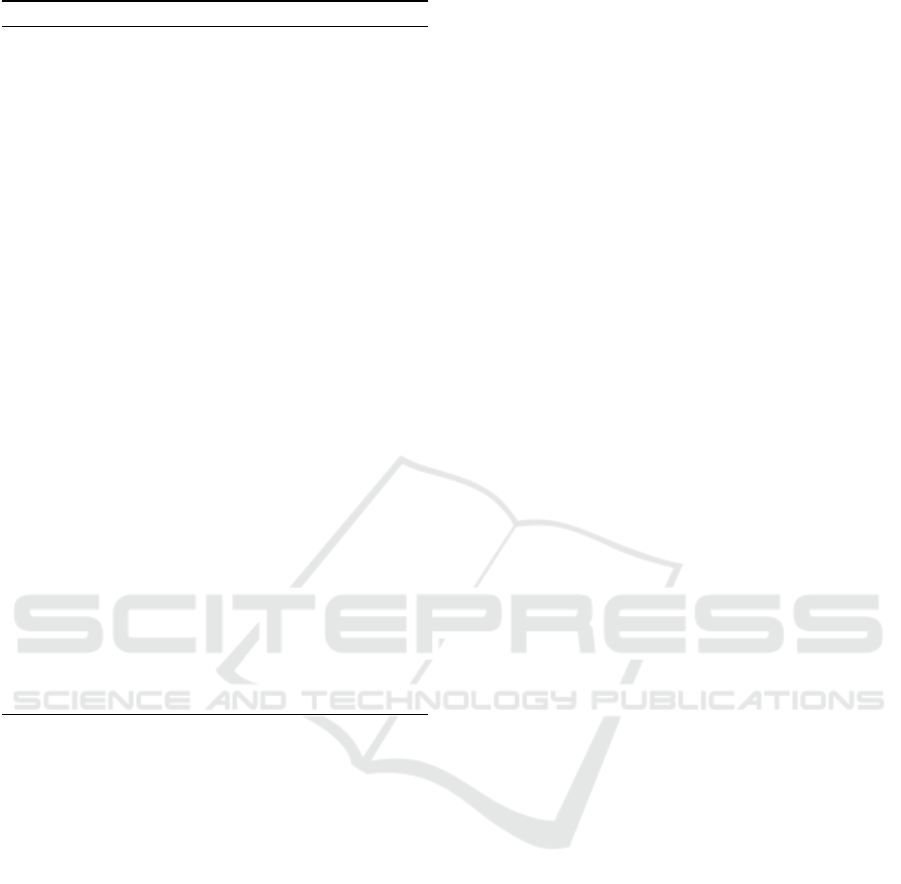
Figure 1: MSCFLP: Objective function values depending
on the incompatibility type.
Figure 1 shows the optimal objective function
value for each of the five instances when solving
MSCFLP in the case without incompatibilities (NO-
INC), for C-INC, and for F-INC.
Interesting enough the incompatibilities on the
customers have a limited impact on the solution by
only slightly increasing the total costs. On the con-
trary, incompatibilities among facilities, as expected,
have a significant effect on total costs with an average
increase of 28.94%. Solutions without incompatibil-
ities open up, on average, 46.6 facilities out of 300,
whereas such a number reduces to 45 when consider-
ing F-INC.
Figure 2 points out that the average number of cus-
tomers per facility in the NO-INC case is ranging be-
tween 6 and 6.6 and that only slightly reduces (and
not for all instances) when incompatibilities on cus-
Figure 2: MSCFLP: Average number of active customers
per facility.
tomers are introduced. Incompatibility on facilities
seems to have a stronger impact even if the number of
customers per facility never increase over 7.
Figure 3 provides us the number of facilities that
in a multi-source problem serve each customer. It is
evident how such a number is always ranging between
1.12 and 1.16 with no clear pattern or dominance of
one case (NO-INC, C-INC or F-INC) over the others.
Figure 3: MSCFLP: Average number of opened facility per
customer.
6 CONCLUSIONS
Incompatibilities play an important role in many dif-
ferent combinatorial problems. Despite the fact that
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
110

the introduction of conflicts has a natural meaning
justified by several practical applications, the facility
location problems with incompatibilities have found
a limited attention in the literature.
We have studied the introduction of two types
of conflicts involving customers when served by the
same facility or among facilities themselves. Such
constraints have been added to both single- and multi-
source capacitated problems.
A two-phase Kernel Search has been implemented
to solve the problems. Its performance has been com-
pared to the exact solutions of the mathematical for-
mulations through the MIP solver Gurobi. Computa-
tional results on benchmark instances, duly modified
to include conflict graphs, show how two-phase KS is
extremely efficient and effective getting, on average,
better solution than the ones found by Gurobi and in
a lower amount of time.
As future developments, we will consider the in-
troduction of a more general concept of incompatibil-
ity and we will analyze the impact in terms of costs
of a joint combination of all considered incompatibil-
ities.
REFERENCES
Ahuja, R. K., Orlin, J. B., Pallottino, S., Scaparra, M. P.,
and Scutell
`
a, M. G. (2004). A multi-exchange heuris-
tic for the single-source capacitated facility location
problem. Management Science, 50(6):749–760.
Angelelli, E., Mansini, R., and Speranza, M. G. (2010).
Kernel search: A general heuristic for the multi-
dimensional knapsack problem. Computers & Opera-
tions Research, 37(11):2017–2026.
Angelelli, E., Mansini, R., and Speranza, M. G. (2012).
Kernel search: A new heuristic framework for port-
folio selection. Computational Optimization and Ap-
plications, 51(1):345–361.
Avella, P. and Boccia, M. (2009). A cutting plane algorithm
for the capacitated facility location problem. Compu-
tational Optimization and Applications, 43(1):39–65.
Avella, P., Boccia, M., Mattia, S., and Rossi, F. (2021).
Weak flow cover inequalities for the capacitated fa-
cility location problem. European Journal of Opera-
tional Research, 289(2):485–494.
Bettinelli, A., Cacchiani, V., and Malaguti, E. (2017). A
branch-and-bound algorithm for the knapsack prob-
lem with conflict graph. INFORMS Journal on Com-
puting, 29(3):457–473.
Chen, C.-H. and Ting, C.-J. (2008). Combining lagrangian
heuristic and ant colony system to solve the single
source capacitated facility location problem. Trans-
portation research part E: logistics and transportation
review, 44(6):1099–1122.
Colombi, M., Corber
´
an,
´
A., Mansini, R., Plana, I., and San-
chis, J. M. (2017). The directed profitable rural post-
man problem with incompatibility constraints. Euro-
pean Journal of Operational Research, 261(2):549–
562.
Fern
´
andez, E. and Landete, M. (2015). Fixed-Charge Fa-
cility Location Problems, pages 47–77. Springer In-
ternational Publishing, Cham.
Fischetti, M., Ljubi
´
c, I., and Sinnl, M. (2016). Benders
decomposition without separability: A computational
study for capacitated facility location problems. Eu-
ropean Journal of Operational Research, 253(3):557–
569.
Gadegaard, S. L., Klose, A., and Nielsen, L. R. (2018).
An improved cut-and-solve algorithm for the single-
source capacitated facility location problem. EURO
Journal on Computational Optimization, 6(1):1–27.
Goossens, D. and Spieksma, F. C. (2009). The transporta-
tion problem with exclusionary side constraints. 4OR,
7(1):51–60.
Hamacher, H. W. and Nickel, S. (1998). Classification of
location models. Location Science, 6(1-4):229–242.
Hanafi, S., Mansini, R., and Zanotti, R. (2020). The multi-
visit team orienteering problem with precedence con-
straints. European journal of operational research,
282(2):515–529.
Ho, S. C. (2015). An iterated tabu search heuristic for
the single source capacitated facility location problem.
Applied Soft Computing, 27:169–178.
Klose, A. and Drexl, A. (2005). Facility location models
for distribution system design. European journal of
operational research, 162(1):4–29.
Lamanna, L., Mansini, R., and Zanotti, R. (2022). A two-
phase kernel search variant for the multidimensional
multiple-choice knapsack problem. European Journal
of Operational Research, 297(1):53–65.
Mansini, R. and Zanotti, R. (2020). A core-based exact
algorithm for the multidimensional multiple choice
knapsack problem. INFORMS Journal on Computing,
32(4):1061–1079.
Mar
´
ın, A. and Pelegr
´
ın, M. (2019). Adding incompatibil-
ities to the simple plant location problem: Formula-
tion, facets and computational experience. Computers
& Operations Research, 104:174–190.
Oliveira,
´
O., Matos, T., and Gamboa, D. (2020). A ramp
algorithm for large-scale single source capacitated fa-
cility location problems. In Matsatsinis, N. F., Mari-
nakis, Y., and Pardalos, P., editors, Learning and Intel-
ligent Optimization, pages 171–183, Cham. Springer
International Publishing.
S¸uvak, Z., Altınel,
˙
I. K., and Aras, N. (2020). Exact solu-
tion algorithms for the maximum flow problem with
additional conflict constraints. European Journal of
Operational Research, 287(2):410–437.
Two-phase Kernel Search: An Application to Facility Location Problems with Incompatibilities
111
