
Detecting Turistic Places with Convolutional Neural Networks
Fabricio Torrico-Pacherre, Ian Magui
˜
na-Mendoza and Willy Ugarte
a
Universidad Peruana de Ciencias Aplicadas (UPC), Lima, Peru
Keywords:
VGG16, SOA, Tourism, Application, Place Recognition, Neural Network, Image Processing.
Abstract:
A mobile application was developed for the recognition of places from a photo using the technique “content
based photo geolocation as spatial database queries”. For this purpose, an investigation and analysis of the
different existing methods that allow us to recognize images from a photo was carried out in order to select
the best possible model and then improve it. Performance comparisons, comparison of number of parameters,
Error: imagenet and the Brain-Score were made; once the best model was obtained, the algorithm was imple-
mented and with the results the expected information of the place in the photo was shown. The purpose of this
information is to recommend nearby places of interest. In the development stage, first, we implement an archi-
tecture with convolutional neural networks VGG16, for the recognition of places, the model was trained, after
obtaining a trained model with successful results, the construction phase of the application continued. mobile
in order to test the operation of the model. Users will use the app by submitting a photo which will query the
trained model, and results will be obtained in seconds, information that will provide a better experience when
visiting unknown places.
1 INTRODUCTION
Nowadays, tourists are constantly looking for infor-
mation about new places and experiences, as well as
applications that promote tourism, but these can be
somewhat cumbersome to use, or also the new tech-
nology implemented in many applications, such as 3D
technology, which is very interesting and visual, but
also more expensive, so they become unaffordable or
have some failure for being a new technology. There-
fore, a simple application that contemplates the intu-
itive and user experience is key to highlight the infor-
mation that is intended to show. “... New ways of us-
ing technology are nowadays within the real reach of
cultural tourists, improving interaction and opening
new possibilities. In the case of offering a destina-
tion, they not only guarantee a return on investment,
but are also key tools to promote cultural assets, or to
know the visitor’s profile, as well as being very use-
ful to achieve excellence in cultural tourism destina-
tions...” (Kontogianni et al., 2022).
In 2019 research was carried out where it was
identified that there is a problem with the dissemi-
nation of tourist information, since there are no ap-
propriate channels for its presentation or they do not
present the clear objectives, in addition, these chan-
a
https://orcid.org/0000-0002-7510-618X
nels do not provide the current information of the
place in a way that is really useful for tourists. They
also present a cost for this presentation and this prob-
lem usually decreases the interest to visit places for
tourist purposes generating a bad experience (Vas-
concelos et al., 2021). Computer visual recognition
has gained interest in recent years , so advanced deep
learning techniques are being employed to address the
problem. The achievement of this activity starts from
the challenge of addressing various problems such as
false recognition of locations that generates interfer-
ence, which reduces accuracy and causes localization
failures, so they must achieve very high recognition
accuracy (Masone and Caputo, 2021).
Performing an image recognizer is not usually a
simple task, it is a technique that is used by several
programs to recognize faces, car license plates, ob-
jects, etc. This technique requires hard work to be
performed efficiently. The complexity of this task
goes hand in hand with what one seeks to detect, since
it is necessary to perform a previous training so that
the model can automatically recognize an image and,
consequently, an extensive data set is required to in-
crease the accuracy of detection, this varies depending
on what you want to predict. In the case of detecting
a place, it is important to take into account the nature,
since it can alter the appearance of the place.
Torrico-Pacherre, F., Maguiña-Mendoza, I. and Ugarte, W.
Detecting Turistic Places with Convolutional Neural Networks.
DOI: 10.5220/0010992500003179
In Proceedings of the 24th International Conference on Enterprise Information Systems (ICEIS 2022) - Volume 1, pages 471-478
ISBN: 978-989-758-569-2; ISSN: 2184-4992
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
471

There are models that recognize images for a spe-
cific purpose automatically, which use a single im-
age for their operation independent of the data used
to train the model, as in the paper Mask R-CNN, in
which the authors present a new framework for seg-
menting object instances. Their approach efficiently
detects objects in an image and, at the same time,
generates a high-quality segmentation mask for each
instance. The method, called Mask R-CNN, extends
Faster R-CNN by adding a branch for predicting an
object mask in parallel with the existing branch for
bounding box recognition (He et al., 2017). These
models are not oriented to promote tourism in a di-
rect way and share a common problem which is the
accuracy in detecting a place. Therefore, the motiva-
tion of this research is to be able to detect a place with
a high accuracy, oriented to promote tourism in little
recognized places, our research presents the following
contributions:
• We perform a comparative analysis of neural net-
work architectures to generate location detection
based on metrics of number of parameters, Error:
imagenet and Brain-Score.
• We propose a deep learning model, which is based
on the use of a VGG16 architecture to perform au-
tomatic place detection with a single input image
and high accuracy.
• We develop a mobile application which will use
the place recognition algorithm to locate on a map
where the place is located, as well as surrounding
places of interest.
This paper is organized as follows. In section 2 we
mention the work related to place detection; in sec-
tion 3 we will discuss the context on which we based
our proposal and explain our contributions in more
depth. Subsequently, in section 4 we will present
the experiments that were necessary to generate the
model. Finally, in section 5 we will specify our main
conclusions and results of the finished application.
2 RELATED
WORKS/DISCUSSION
The authors of (Zhang et al., 2021) present an intro-
duction to deep learning, specially convolutional neu-
ral networks. They then discuss potential deep learn-
ing opportunities in visual place recognition (VPR)
and present CNN-based place recognition methods
using the VGG16 network. With this information, we
were able to have a better understanding of how con-
volutional networks work and how they are applied to
image recognition problems, so we were able to adapt
them to detect places, starting with the same network
presented in VGG16 but applying modifications in its
layers to improve its performance.
The authors of (He and Li, 2019) perform a pre-
processing of images transformed to gray scale, ap-
plying a filter to them. Subsequently they apply a re-
finement of the image by modifying the brightness,
contrast and pixel distribution in order to apply it to
their model and obtain a better detection rate. Un-
like this previous paper, we did not apply a gray scale
to our images because they are in the environment
and are affected by it, also because they were lim-
ited to images that are illuminated until before sunset,
so these images were applied a pre-processing where
they were reduced to the same size to all the images
in addition to converting them to tensors in order to
have a faster and more effective training.
The authors of (He et al., 2020) present a new
framework for segmenting object instances. Their ap-
proach detects objects in an image and, at the same
time, generates a high-quality segmentation mask for
each instance to make it easier to detect an image. In
contrast, we did not apply object segmentation as it
was applied in this paper, because we decided to cap-
ture all the information presented in the image and not
limit ourselves by specific objects, thus avoiding the
generation of a mask for each object that can be seen
in the image and accelerating our prediction process.
The authors of (Tian, 2020) present a recurrent
neural network in the convolutional neural network
and use both to learn the deep features of the im-
age in parallel. In order to establish a dual optimiza-
tion model, and thus, achieve an integrated optimiza-
tion of the whole convolution and connection process.
In contrast, for the creation of our network we only
used the convolutional network because of the previ-
ous processing of the images, so that only the use of
this network was enough to obtain the necessary fea-
tures and present satisfactory results (see section 4).
There are various works involving convolutional
neural networks for differents tasks (e.g., Natural
Language Processing (Trusca and Spanakis, 2020),
volumetric representations (Filipovic et al., 2018)),
furthermore for enhancing their performance (Al-
Hami et al., 2018; Guo et al., 2019), but not that many
for place recognition with touristic purposes.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
472
3 PLACE DETECTION WITH
DEEP LEARNING
3.1 Preliminary Concepts
In this section we will explain the most relevant topics
for this work, about which in section A we will talk
about Deep Learning and neural networks, which was
the method used to solve the problem. Then in section
B we will talk about what is image recognition and
what we mean by geolocation. Finally, section C will
explain what a software architecture looks like.
3.1.1 Deep Learning - Neural Networks
The field of Deep Learning (DL) is an area integrated
to Machine Learning (ML). Within this field is the set
of artificial neural networks (ANN), these networks
work by learning patterns, which are based on the
simulation of the human brain. As its name says, it
is a deep learning, this means that it uses computa-
tional models that are structured by several layers to
perform the learning process, to evaluate and learn the
data given to these models (Goodfellow et al., 2016).
These data provided for recognition and learning can
be numerical, videos, among others. But for the pur-
poses of this work, photos will be used. We can say
that DL is supported by ML algorithms, which are
based on neural networks (Goodfellow et al., 2016).
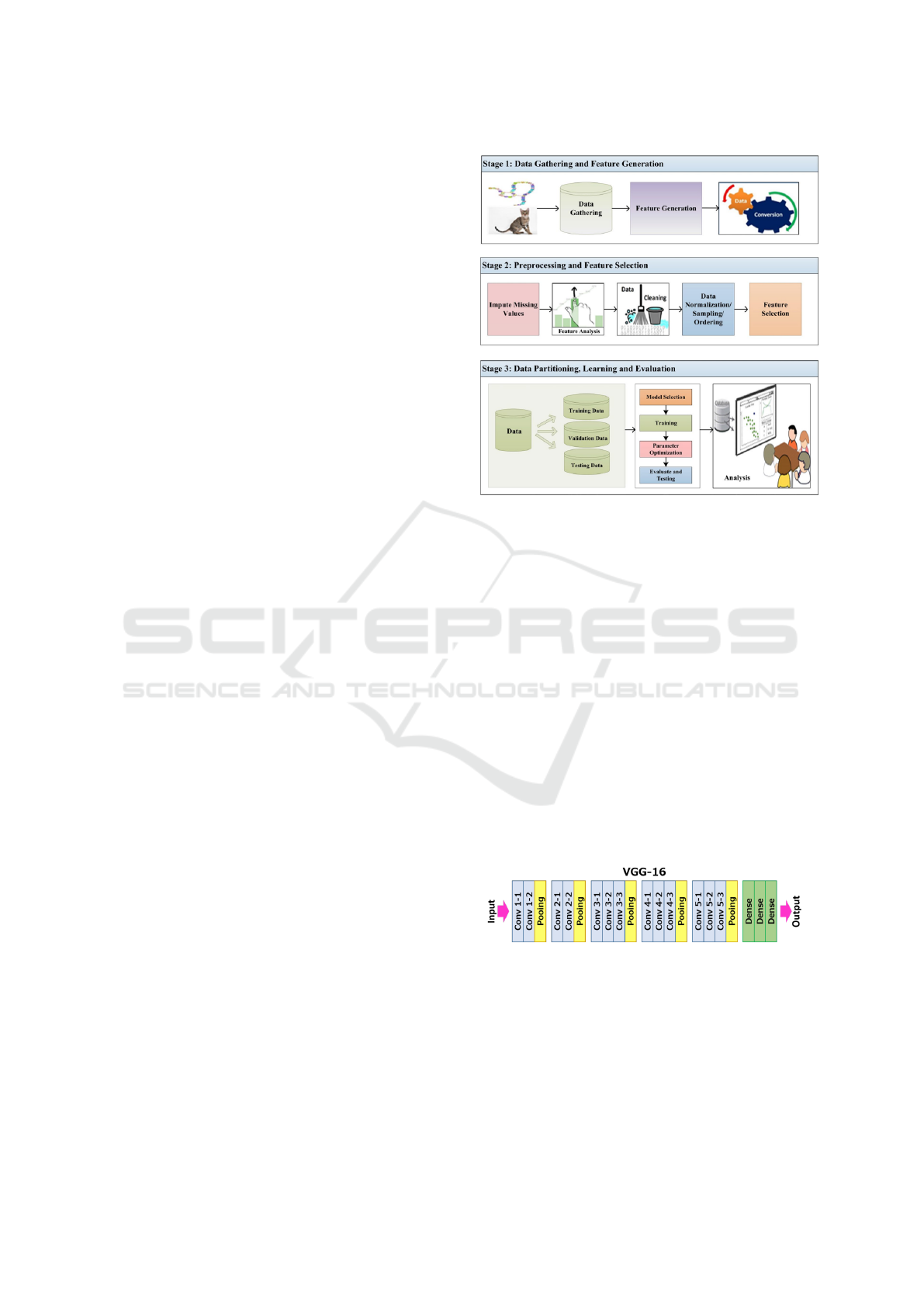
These networks show good results when used in
learning that requires generating grid representations
of data. Convolutional neural networks (CNN) per-
form well in generating functions and being able to
discriminate data correctly. A basic ML system can
be seen in Fig. 1. In the first section they generate
the data to be used and classify them, in the second
section they pre-process the data to be used more ef-
ficiently and finally, they divide the data and this is
then used in the predictive models. These networks
have high performance in the generation and classifi-
cation of features (Khan et al., 2020).
A typical CNN is comprised of alternating con-
volution layers and pooling layers followed by one or
more fully connected layers. However, sometimes the
connected layers are replaced by globally averaged
pooling layers. In addition to the basic functions it
possesses, CNNs have various regulators such as nor-
malization and dropout functions, which are added to
improve network performance (Khan et al., 2020).
VGGs are a type of neural networks, in which
their architecture is composed of layers. This type
of network was implemented with 19 layers deep in
order to perform simulations with a deep search to
represent the functioning of a brain neural network.
Figure 1: Basic layout of a typical ML system having sev-
eral stages (Khan et al., 2020).
With the passage of time and new findings, a new fil-
ter was implemented, which is used by this network,
the VGG replaces the 11x11 and 5x5 filters with a
3x3 filter distributed in its layers, which showed that
with a regular filter size (3x3), the effect generated
by the 7x7 and 5x5 filters can be replicated. Using a
reduced filter size provides a better result with less
computational complexity, since the number of pa-
rameters is reduced. Thanks to this, there is a ten-
dency to work with smaller filters to use convolutional
networks. The VGG uses 1x1 convolutions in its lay-
ers, which are convolutional layers, in order to further
optimize the complexity of the network. Likewise,
these layers learn the different combinations that are
generated by the results of the previous layers (Khan
et al., 2020). In the Fig. 2 a basic architecture of how
a VGG16 neural network is composed can be seen.
Figure 2: Architecture of a VGG16 network (Pensyl et al.,
2019).
3.1.2 Image Recognition - Geolocalization
Image recognition is a technique applied to identify
objects or images, where this data is used to gener-
ate an accurate decision within a larger system. This
technique is used by means of machine learning or
deep learning (Heinisch and Ostaszewski, 2018). Im-
Detecting Turistic Places with Convolutional Neural Networks
473
age recognition processes the data received through
training data and then evaluates it with the test data to
get a more accurate response.
According to (Williams et al., 2017), geolocation
is understood as the tool capable of allowing the spa-
tial location of any object or person, this tool that uses
the coordinates studied by geographers, has been im-
proved over time to the point of creating new appli-
cations. This happened with the arrival of mobile de-
vices since it allowed anyone with them to know their
location on the map via GPS (Williams et al., 2017).
3.1.3 Software Architecting
Software Architecting or software architecture has
had several meanings, one of the last ones is defined
as the set of structures necessary to reason about the
system comprising parts and relationships between
them, in addition to the properties that both have (Kn-
odel and Naab, 2014). It should be considered that
when designing a software architecture it should re-
spond directly to the qualitative needs of the client
about the system, i.e., it is built from the quality at-
tributes.
A simple example of this is that when requiring
mainly that the system is developed in a short time
and is not scalable, i.e., more functionalities will not
be incorporated later, in addition to being able to test
the application easily, it is possible to opt for an archi-
tecture that is easy to build such as the layered archi-
tecture, which is the best in terms of ease of develop-
ment and testability. In the Fig. 3 a layered architec-
ture can be seen.
Figure 3: Layered Architecture.
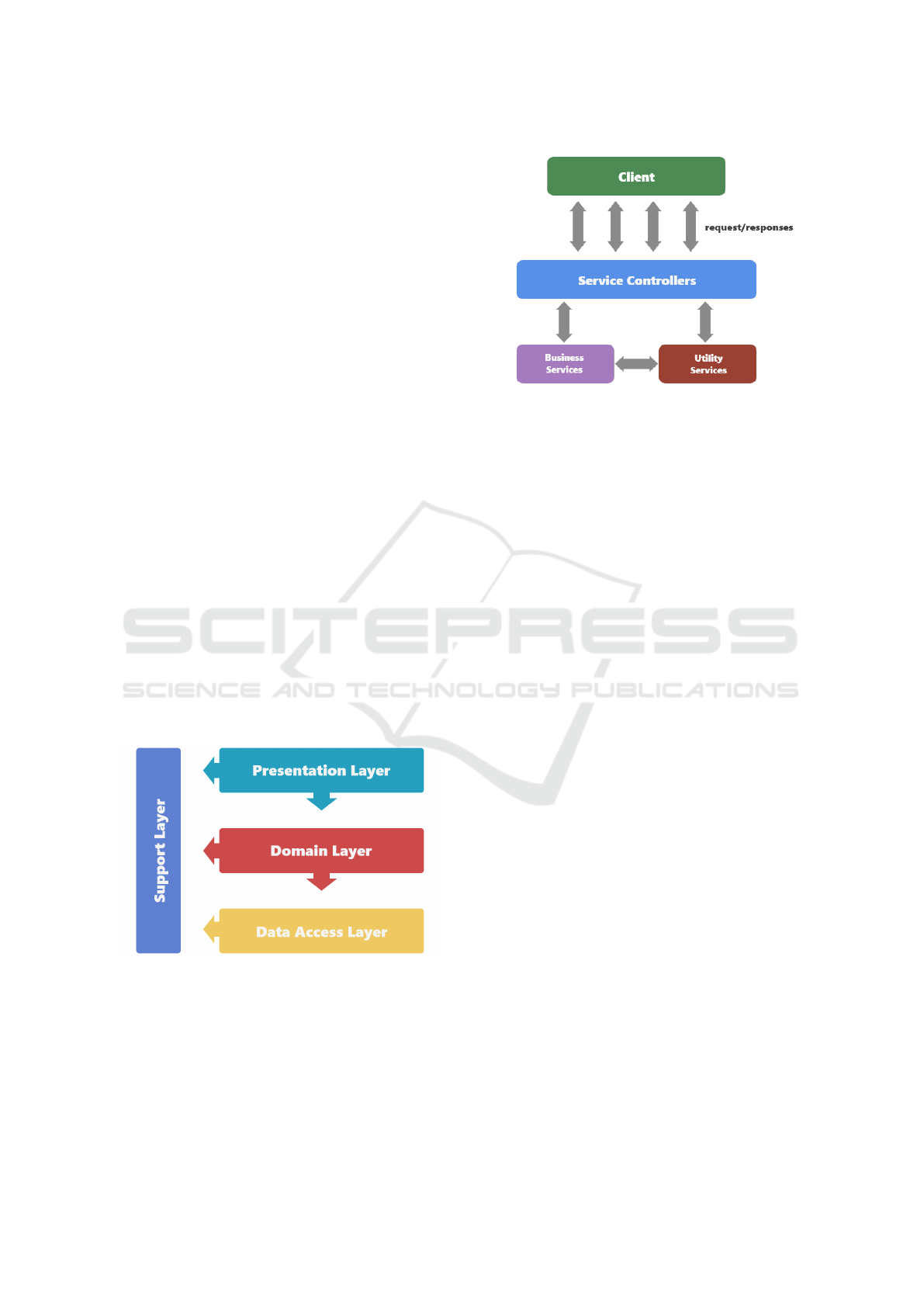
But if, in addition to ease of development, we wish
to comply with quality attributes such as scalability or
flexibility, we can count on the service-oriented archi-
tecture (SOA), as shown in Fig. 4.
Figure 4: Service Oriented Architecture.
3.2 Method
This section will address the technologies applied in
the project for the science and software area, in sec-
tion A the convolutional model to be applied will be
analyzed, and in section B, the topic of the chosen
service-oriented architecture.
3.2.1 Convolutional Network
In this section, a comparison of 3 convolutional mod-
els was used, as shown in Table 1 bellow, in order to
select the best model to be used. This comparison was
made in 4 categories:
• Number of parameters: The number of parame-
ters is decided after performing an investigation
and making comparisons with the sources found
in each network.
• Error: ImageNet: The imageNet error is a test that
is usually applied to the CNNs to measure their ef-
ficiency, it is through a common dataset and show
how much error they have to detect, for this was
compared with the sources found in each network
and another where the networks are compared.
• N 140: When putting the brain-score, it was de-
cided to put the position where the best type of
each network of 140 comparisons is found, in this
way to show which is the most outstanding.
• Number of wins: For the calculation of the num-
ber of wins, it was decided to use its own crite-
ria where a point would be added for each section
where the result is the best, the winner will be the
one that has won the most fields
In which the VGG neural network was the winner,
the comparison can be seen in the Table 1. This net-
work receives as input a 2D image, where each layer
obtains as output the previous layer as input. In each
of its convolution layers there is a predetermined filter
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
474
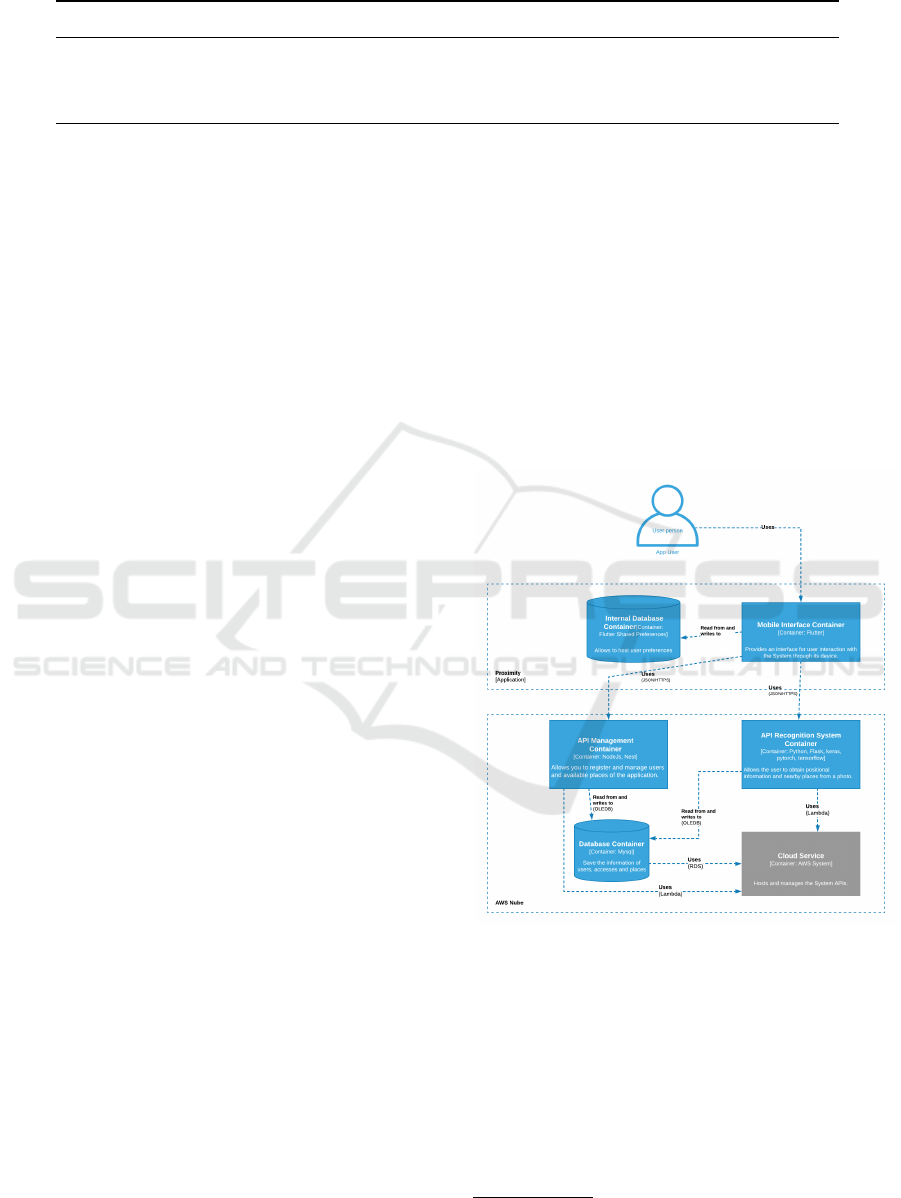
Table 1: Models.
Number of parameters Error : ImageNet Brain-Score: N 140 Number of wins
VGG 138M 7.3 2 2
GooLeNet 4M 6.7 36 0
RestNet 25.6M 3.6 3 1
and at the time of performing the convolution opera-
tion, each filter is displaced in the input by the num-
ber of jumps, since the data obtained by each image
usually have a higher correlation in a local area as op-
posed to a global area. In this convolution process all
the features of the input image to which the filters are
applied are extracted, so this extracted data is called
feature map (Ha et al., 2018).
After extracting the features from the image, the
clustering layer gathers the similarities found for each
feature and thanks to this the performance of the net-
work becomes distortion invariant, furthermore in this
layer it also has the function of reducing the dimen-
sions of the feature map and when this resulting map
enters the next layer a new one is generated (Ha et al.,
2018). After starting with the base configuration of
the network, modifications were made with the fine-
tuning function of the torchvision library, by means
of which the values of the last 4 layers were altered
to try to obtain better results than the base network in
the prediction of a location.
3.2.2 Service Oriented Architecture
The service-oriented architecture or SOA corresponds
to a style of software architecture that consists of
thinking in services for each aspect of the system,
which will be designed to be reusable through public
interfaces, allowing the existence of an ecosystem of
interaction between providers and consumers. SOA is
implemented based on 4 abstractions:
• Services are the business logic and data manage-
ment, contemplating access restrictions and an in-
terface with which to expose them to consumers.
• The frontend is the application or UI, which inter-
acts directly with the user.
• The service repository is where the designed ser-
vices will be hosted, i.e. the cloud, to be available
to the allowed users accessing the Internet
• The service bus is the way in which the services
communicate with the consumers (Avila et al.,
2017).
The reason to take into account this architecture
is for the very fact of having independent services,
from this we can create a system and modify it con-
tinuously because programming a new functionality
does not cause conflict problems with the previous
ones, then meet quality attributes such as scalability
or testability. On the frontend side, the only concern is
to consume the service correctly, pointing to the cor-
rect endpoint, in our case from the mobile application.
The following is a container diagram (see Fig. 5),
part of the C4 model
1
used to explain how the cho-
sen architecture will be adapted to our project, which
shows the interaction between the user and the appli-
cation, which, in turn, interacts with the APIS “Man-
agement” and image recognition “API Recognition
System”, both containers interact with the MySQL
database. All these containers are managed by the
Cloud services environment, Amazon Web Services.
Figure 5: C4: Project Container Diagram.
4 EXPERIMENTS
In this section we describe the working environment
of the experiments performed, the process carried out
for the collection of information needed to train the
model, the image pre-processing and the model cre-
ated with the various features it contains. Then we
developed our application.
1
C4 model - https://c4model.com/
Detecting Turistic Places with Convolutional Neural Networks
475

4.1 Experimental Protocol
• Working Environment: To carry out the experi-
ments a series of decisions were made and frame-
works that were indispensable were adopted.
1. We made use of the free version of the google
collab platform, with which we developed in
Python version 3.8 and mainly used the pytorch
libraries, which helped us to generate a better
training of the convolutional model. On the ser-
vices side, which were necessary to communi-
cate the interfaces with the database and/or the
model, Flask in version 2.0.1 was adopted to
access the recognition algorithm developed in
collab. In VS Code the libraries that were in-
stalled in the local environment were: flask, py-
torch, pandas, folium and numpy, to be able to
execute it as API.
2. For the management services, we used NodeJs
v14.15.1 and Nest 4.6.0, in the windows 10 op-
erating system, which is not determinant be-
cause the mentioned frameworks are multi plat-
form. In addition, git was in- stalled in order to
manage repositories and have a version control.
Finally, for the construction of the application we
used Flutter v2.2.3, Dart 2.13.3
• Compilation of Images: In order to feed the
model, it was necessary to obtain 2400 images of
the 4 places that would be part of our test, located
in the district of San Miguel, Lima - Peru. The
images would have to be processed in order to im-
prove the study.
The source code of the project can be found at
https://gitlab.com/researchgames upc
4.2 Results
As previously mentioned, tests were performed on the
last 4 layers of the neural network in order to obtain
better results, 5 runs were performed on the modified
layers where a slight improvement in the prediction of
the network was evidenced, these results can be seen
in Table 2. For the following comparative tables, the
best results obtained according to the compared cate-
gory will be taken, however, in the case of acurracy,
the highest will be taken and the winning results will
be painted in bold.
• Model 1: It represents the base configuration of
the neural network.
• Model 2:
– Layer 30 containing kernel size: 2, stride: 1,
padding: 1, dilation: 4 and ceil mode: FALSE
was altered.
– Layer 29 containing inplace: FALSE.
– Layer 28 containing kernel size: 1,1 ; stride:
2,2 and padding: 3,3.
– Finally layer 27 containing inplace: FALSE.
• Model 3:
– Layer 30 containing kernel size: 2, stride: 3,
padding: 0, dilation: 3 and ceil mode: TRUE.
– Layer 29 containing inplace: TRUE.
– Layer 28 containing kernel size: 2,2 ; stride:
3,3 and padding: 2,2.
– Finally layer 27 containing inplace: TRUE.
• Model 4:
– Layer 30 containing kernel size: 2, stride: 2,
padding: 0, dilation: 1 and ceil mode: FALSE
was altered.
– Layer 29 containing inplace: FALSE.
– Layer 28 containing kernel size: 2,2 ; stride:
3,3 and padding: 0,0.
– Finally layer 27 containing inplace: FALSE.
• Model 5:
– Layer 30 containing kernel size: 2, stride: 1,
padding: 1, dilation: 2 and ceil mode: TRUE.
– Layer 29 containing inplace: TRUE.
– Layer 28 containing kernel size: 1,1 ; stride:
2,2 and padding: 3,3.
– Finally layer 27 containing inplace: TRUE.
Table 2: Fine Tunning.
Time Accuracy
Model 1 1h 20m 20s 0.979
Model 2 1h 20m 50s 0.988
Model 3 1h 19m 25s 0.985
Model 4 1h 22m 28s 0.979
Model 5 1h 23m 20s 0.989
It was necessary to compare these 5 models in or-
der to find out which configuration showed the best
results and thus choose the best model for the re-
search. To verify the results obtained with our model
we proceeded to perform new tests with the same
dataset obtained, these tests were performed on 3 dif-
ferent algorithms to demonstrate the efficiency of neu-
ral networks, these algorithms were decision trees,
support vector machines (SVM) and GradientBoost-
ing. For each of these algorithms, an investigation
was first carried out to see how they work and to be
able to find a base structure in which it is easy to mod-
ify and attach the image dataset.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
476

Table 3: Classification methods.
(a) Decision Trees.
Fixed size Bins N trees Seed Time Accuracy
DT 1 500, 500 8 100 9 18m55s .999
DT 2 500, 500 16 100 9 19m45s .999
DT 3 400, 400 8 100 9 25m37s .999
DT 4 400, 400 16 100 9 9m53s .999
DT 5 400, 400 32 100 9 10m24s .649
(b) Support vector machines.
C Gamma Kernel Time Accuracy
SVM 1 0.1 .0001 rbf 1h29m35s .970
SVM 2 0.1 .0001 poly 34m19s .995
SVM 3 0.1 .0010 rbf 2h13m52s .885
SVM 4 1.0 .0001 rbf 36m36s .100
SVM 5 1.0 .0001 poly 24m32s .100
Table 4: Gradient Boosting.
Learning rate Time Accuracy
GradientBoosting 1 .30 1.10s .972
GradientBoosting 2 .35 1.10s .970
GradientBoosting 3 .40 1.10s .973
GradientBoosting 4 .45 0.99s .978
GradientBoosting 5 .50 0.99s .980
GradientBoosting 6 .55 0.98s .980
GradientBoosting 7 .60 0.98s .982
GradientBoosting 8 .65 0.99s .975
GradientBoosting 9 .70 0.99s .977
GradientBoosting 10 .75 0.98s .980
In the Table 3 the values of the fixed size variable
were modified, which modified the size of the images
in order to have a standard at the moment of being
trained and the bins, which are a small set of data, in
this case of images.
In the Table 3b the values C (which controls the
cost of the calculation errors), gamma (which varies
the distribution of the data assigned to a support vec-
tor) and kernel (which is a variable where the mathe-
matical function is defined) were modified.
In the Table 4 the learning rate is altered, it is the
hyperparameter/variable that controls how fast a Gra-
dient Boosting algorithm learns, it is known that it can
limit the possibilities of overfitting.
4.3 Discussion
Table 2 shows the results of altering the neural net-
work to obtain better results, as can be seen the test 05
showed the best percentage when detecting an image
so we decided to establish it as the final configuration
of the network. As a result of these experiments, we
obtained that the algorithm of decision trees which are
seen in Table 3, presented certain inferior results com-
pared to the neural networks at the time of detecting
an image, however it was evidenced in the last tests
that the percentage when detecting a place exceeds
98. Despite this, a convolutional network is still the
best option for these problems since, unlike the deci-
sion trees, is perfectible with more data, so if classes
are increased, in our case places, it will have a better
accuracy since it works deeper than this algorithm.
Similarly, the SVM algorithm shown in the Ta-
ble 3b, presents a similar behavior, since not in all the
results obtained it exceeds that of our network, how-
ever, unlike the decision trees, this algorithm works
faster with few classes so more tests could be per-
formed in less time. Even so, neural networks remain
as the best option due to the same problem, perfor-
mance, as it does not improve by increasing the num-
ber of classes.
Finally, the GradientBoosting algorithm, which
can be seen in the Table 4, was the fastest in execu-
tion, the speed shown when detecting the consulted
place was considerably faster than the other algo-
rithms so that a greater number of comparative tests
could be performed, however, these results do not ex-
ceed the proposed network, so with the answers ob-
tained it is evident that this algorithm is inferior to
ours. These executions allow us to confirm that, for
this type of problems, using the convolutional neural
network is one of the best options w.r.t. performance.
5 CONCLUSIONS AND
PERSPECTIVES
We conclude that the algorithm belonging to the
VGG16 model is applicable in the test sites within
Lima, parks and ruins, in the future should be con-
sidered more spaces with topographic variations and
Detecting Turistic Places with Convolutional Neural Networks
477

conduct more experiments throughout the country, in
order to ensure the result. Evenmore, this kind of
architecture was applied to other kinds of problems,
for instance sheet music recognition (Lozano-Mej
´
ıa
et al., 2020) or fruit ripeness (Rodr
´
ıguez et al., 2021).
We consider that the software architecture used,
SOA or Service Oriented Architecture, was the most
appropriate because it provides a scalable environ-
ment to the project, that is, it allows the project to
remain current with the continuous incorporation of
users, as opposed to other monolithic architectures
that do not, or others that being scalable are more
complex as micro services, which is more suitable for
much larger projects.
In next steps we would like to incorporate the pos-
sibility of feeding the model, but this time by other
users that through the continuous input of images
open new places of reference that the application can
detect allowing the application to evolve over time.
REFERENCES
Al-Hami, M., Pietron, M., Casas, R. A., Hijazi, S. L., and
Kaul, P. (2018). Towards a stable quantized convolu-
tional neural networks: An embedded perspective. In
ICAART.
Avila, K., Sanmartin, P., Jabba, D., and Jimeno, M. (2017).
Applications based on service-oriented architecture
(SOA) in the field of home healthcare. Sensors, 17(8).
Filipovic, M., Durovic, P., and Cupec, R. (2018). Exper-
imental evaluation of point cloud classification using
the pointnet neural network. In IJCCI.
Goodfellow, I. J., Bengio, Y., and Courville, A. C. (2016).
Deep Learning. Adaptive computation and machine
learning. MIT Press.
Guo, Y., Cao, H., Bai, J., and Bai, Y. (2019). High efficient
deep feature extraction and classification of spectral-
spatial hyperspectral image using cross domain con-
volutional neural networks. IEEE J. Sel. Top. Appl.
Earth Obs. Remote. Sens., 12(1):345–356.
Ha, I., Kim, H., Park, S., and Kim, H. (2018). Image re-
trieval using bim and features from pretrained vgg net-
work for indoor localization. Building and Environ-
ment, 140.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2017).
Mask R-CNN. In IEEE ICCV.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. B. (2020).
Mask R-CNN. IEEE Trans. Pattern Anal. Mach. In-
tell., 42(2).
He, T. and Li, X. (2019). Image quality recognition technol-
ogy based on deep learning. J. Vis. Commun. Image
Represent., 65.
Heinisch, P. and Ostaszewski, K. (2018). Matcl: A new
easy-to use opencl toolbox for mathworks matlab. In
ACM IWOCL.
Khan, A., Sohail, A., Zahoora, U., and Qureshi, A. S.
(2020). A survey of the recent architectures of deep
convolutional neural networks. Artif. Intell. Rev.,
53(8).
Knodel, J. and Naab, M. (2014). Software architecture eval-
uation in practice: Retrospective on more than 50 ar-
chitecture evaluations in industry. In IEEE WICSA.
Kontogianni, A., Alepis, E., and Patsakis, C. (2022). Pro-
moting smart tourism personalised services via a com-
bination of deep learning techniques. Expert Syst.
Appl., 187.
Lozano-Mej
´
ıa, D. J., Vega-Uribe, E. P., and Ugarte, W.
(2020). Content-based image classification for sheet
music books recognition. In IEEE EirCon.
Masone, C. and Caputo, B. (2021). A survey on deep visual
place recognition. IEEE Access, 9.
Pensyl, W. R., Min, X., and Lily, S. S. (2019). Facial recog-
nition and emotion detection in environmental instal-
lation and social media applications. In Encyclopedia
of Computer Graphics and Games. Springer.
Rodr
´
ıguez, M., Pastor, F., and Ugarte, W. (2021). Classi-
fication of fruit ripeness grades using a convolutional
neural network and data augmentation. In FRUCT.
Tian, Y. (2020). Artificial intelligence image recognition
method based on convolutional neural network algo-
rithm. IEEE Access, 8.
Trusca, M. M. and Spanakis, G. (2020). Hybrid tiled con-
volutional neural networks (HTCNN) text sentiment
classification. In ICAART.
Vasconcelos, C., Reis, J. L., and Teixeira, S. F. (2021). Use
of mobile applications in the tourism sector in portu-
gal - intention to visit the algarve region. In World-
CIST.
Williams, E., Gray, J., and Dixon, B. (2017). Improving ge-
olocation of social media posts. Pervasive Mob. Com-
put., 36.
Zhang, X., Wang, L., and Su, Y. (2021). Visual place recog-
nition: A survey from deep learning perspective. Pat-
tern Recognit., 113.
ICEIS 2022 - 24th International Conference on Enterprise Information Systems
478
