
Multiagent Resource Planning System for Utility Provision
Sergei Kozhevnikov
1a
, Petr Skobelev
2b
and Miroslav Svítek
3c
1
Czech Institute of Informatics, Robotics and Cybernetics Jugoslávských partyzánů 1580/3, Prague 6, Czech Republic
2
Samara State Technical University, Molodogvardeyskaya street 244, 443100, Samara, Russian Federation
3
Czech Technical University in Prague, Faculty of Transportation Sciences, Konviktska 20, Prague 1, Czech Republic
Keywords: Multiagent Planning, Smart Grid, Utility Provision, Real-time, Ontology.
Abstract: The intensive economic and social development of smart cities faces the constraints of stable utility provision.
This paper presents a multiagent client-centric smart grid management system for integrated gas, heat and
electricity networks. The system is based on the new approach of agent’s negotiation implementing the
strategies of straight and reverse recursion planning. It can be used as part of the Smart grid and Micro grid
concepts to reduce the price for consumers and decrease the negative impact of peak loads for the suppliers.
This approach corresponds to the fundamental principles of modern complexity theory, which uses the
fundamental principles of self-organization and evolution inherent in the natural world.
1 INTRODUCTION
The intensive economic and social development of
smart cities faces the constraints of stable utility
provision. The constantly increasing demand for
resources reveals several limitations related to the
high cost of production, ecology, the level of energy
losses in the network, and outdated organization
methods. One more limitation is the infrastructure of
a residential area as a conglomerate of complex
technical systems embedded in dense urban or
industrial development landscapes. Every city has its
characteristics and is essentially unique. Some are
characterized by cogeneration of electricity and heat,
while others use combined district heating schemes
with private boilers.
These factors show great potential for adapting
the smart grid (SG) methodology for electricity, heat,
and gas supply systems.
This paper presents a multiagent client-centric
smart grid management system for integrated gas,
heat and electricity networks.
The article's scientific novelty lies behind the
agents' newly presented logic, the negotiation
protocol, where users are part of the decision-making
process, and the software approach of agents and
a
https://orcid.org/0000-0002-2606-282X
b
https://orcid.org/0000-0003-2199-9557
c
https://orcid.org/0000-0003-3971-6850
ontologies combination. The practical value is the
implementation of the complex solution based on the
SG concept that can optimize supply-demand model
of all three types of utilities (gas, heat, electricity) in
one software taking into account of specific
infrastructure constraints. Experimental results have
shown that system implementation can reduce the
price for the end-user.
2 STATE OF THE ART
The term "Smart grid" is still quite vague and for this
research the smart grid is defined through basic
features, among them (Report Australian energy
operator, 2020):
optimal resources load to increase efficiency,
reduce losses and devices failure;
active role of consumers in the network;
the ability to resist new, unplanned events;
synchronous operation of all network elements.
Multiagent Systems (MAS) now are SG enabling
technology because they can possess all mentioned
features, they can give a distributed software
framework and bring intelligence to the grid (Brena,
Handlin, Angulo, 2015). Agents are widely used as
Kozhevnikov, S., Skobelev, P. and Svítek, M.
Multiagent Resource Planning System for Utility Provision.
DOI: 10.5220/0010990600003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 433-441
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
433

the instrument of negotiating on the low sensor level.
In (Nguyen and Flueck, 2015), the idea of an agent-
based distributed power flow solver for unbalanced
radial distribution systems based on MAS is
presented. Since the 2000's researchers have tried to
use intelligent agents because of three main key
features: autonomy, local view, and decentralization.
However, most methods use agents to model lines,
switching devices, voltage regulators, transformers,
distributed energy storage systems, and batteries (for
example to solve the backward/forward sweep
technique problem to solve the power flow
iteratively) (Boudaoud, Labiod, Boutaba, Guessoum,
2000).
MAS is widely used in Smart Homes (Li,
Logenthiran, Woo, 2015) to optimize the energy
consumption on a local house/flat level. Agents help
to plan the optimal solution of energy consumption,
but they do not provide a real-time response to all
unpredictable events. They are used to achieve high
comfort level, energy efficiency, and energy price
through negotiation between devices.
In (Omarov, Altayeva, 2018) the methodology of
MAS is used in intelligent control systems that covers
all the monitored zones of a building and, if
necessary, provides the greatest possible overall
comfort in the building while reducing the required
electric power.
A more comprehensive simulation approach that
accounts for the MAS-related protocols as described in
the FIPA specification is presented in (Le, Bui, Ngo,
2018). It shows promising results for system evaluation
under various settings and design trade-offs.
Agents communication is performed to transfer
neighbouring information between subsystems. It is
shown the possibility of parallel work in different
parts of the distributed network (Shum, 2106).
Agent approach is fundamentally based on
negotiation to find the optimal (or close to the optimal
solution). For this purpose, Combinatorial Auctions
can also be used. The proposed combinatorial
auctions algorithms showed an advantage over a more
rigid scheduling algorithm (Brena, Handlin, Angulo,
2015). This approach can predict and plan but not
manage the system in real-time.
One of the main advantages of MAS is the ability
to work in decentralized systems for electricity
provision (Svítek, Skobelev, Kozhevnikov 2020). It
Is Used Extensively in Research Projects (Morte,
2016) To Develop Distributed Control Systems
Comprised of a Network of Communicating Units.
The Task To Be Solved Is The Issue of Complexity
That Scales Up Exponentially, Limiting The
Development of Smart Grid Technologies.
Decentralization of The Network With The Help
of Multiagent Systems for Electric Vehicles
Infrastructure Is Described in (Jordán, Palanca, Del
Val, Julian, Botti, 2018). Agents Collect, Evaluate
and Manage Data from Elements To Create an
Optimal Cooperation Algorithm.
in (Loni, Parand, 2017) The Game Theory for The
Smart Grid Topic Is Implemented. The Game Theory
Models The Behaviour of Independent and Rational
Agents To Maximize The Profit. Authors Survey
Several Game Theory-based Applications, Incredibly
Cooperative Game Theory To Solve Relevant
Problems in Micro Grids.
a Tremendous Analysis of The MAS Application
in SG Is Done in (Mahela Et Al., 2020).
Comprehensive Overview of Multi-Agent Systems
for Controlling Smart Grids. CSEE Journal of Power
and Energy Systems.). Completed The Review of
General Concepts of Smart Grids and MAS,
Technologies and Standards, Intelligent Agents in SG
and Commercial Projects The Authors See The
Future of MAS in Coordinated Control Replacing
SCADA Systems.
based on The Topic Domain Review, We Can
Define The Trend for MAS Coordinated Control of
The SG and Lack Decision-Making Solutions That
Can Be Applied for Limited Tasks With Severe
Constraints. on The Other Hand, It Is Clear That The
Multiagent Approach Can Be Successfully Used for
Distributed Problem Solving in Decentralized SG
Architectures.
in Our Project, We Extend The SG Concept from
Electricity To All Types of Resources (Electricity,
Gas, Heat). for Citizens It Is a Part of Utility
Provision of The Smart City Concept in General
(Přibyl, Horák, 2015).
The State-of-The-Art Review Highlights The
Main Advantages of MAS. Multiagent Resource
Planning System for Utility Provision Can Plan and
Optimize Utility Provision as a Multi-Criteria Task,
Moving from Determining The Optimum Under
given Constraints (Reliability, Quality,
Environmental Friendliness) To Finding The Optimal
Level Ratio of These Properties.
3 MULTIAGENT SYSTEM FOR
UTILITY PROVISION
3.1 System Functions
Base on the state of the art and market analysis the
consumer-friendly MAS with the following functions
was developed. Main system functions:
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
434

development of a model and plan of resource
production and consumption processes taking
into account the current situation at the network
objects;
real time optimization of production/
consumption plan of resources;
simulation of production/consumption process
for three types of resources in any predefined
scale;
coordination of decision-making process with
end-users through two-way interaction;
conducting simultaneous analysis of multiple
planning options with appropriate allocation of
resources for optimization purposes.
3.2 Types and Characteristics of
System Objects
The main objects in the system are: suppliers
(produce one or several types of resources),
consumers (consume one or several types of
resources), network elements (transmit the resource
from supplier to consumer).
3.2.1 Suppliers
Focusing on statistical and forecast demand data
suppliers make plans for resource production.
Produce resources of one or several types:
Gas. The supplier represents one of the state
gas supply system branches - a gas distribution
station. In the model context, the gas supplier's
production capacity is equal to its throughput
capacity.
Heat. Can be presented as city level suppliers
(thermal power station) acting through the
public heat supply network, or local suppliers.
The thermal power station can work as
cogeneration plant and can operate in two
modes: thermal - heat load is the priority,
electric - electric load is the priority.
Electricity. Electricity can be supplied by
cogeneration plants, hydroelectric power
plants, or local generators.
3.2.2 Consumers
Consume resources requested from suppliers, and
delivered through networks corresponding to the
three types of resources. The sum of all requests
forms a general graph of resource consumption,
affecting the volume of the resource production.
Consumers can be divided to industrial (factories,
plants, etc.), offices, and household users. The main
difference between them in volumes of resource
consumption, range of planning horizon, and
discreteness of consumption plans.
The supplier of resources can also be a consumer.
3.2.3 Storages
Can be both consumer and supplier. Storages can
accumulate a certain amount of resources - gas or
electricity. Storages are characterized by the capacity
and the ability to return the accumulated resource.
3.2.4 Transformers
Resource transformers can change the types of the
transmitted resource (for example, change gas to
electricity).
3.3 Types and Characteristics of
Network Channels
There are three types of channels provided by the
resource-supply network - gas, electric and heat.
3.3.1 Gas Supply Channel
Presented in the system as trunk and city pipelines.
The trunk pipeline delivers the gas to distribution
stations where the pressure is lowered to the required
level.
3.3.2 Heat Supply Channel
Delivers heat, in this project (as usually in real cities),
this channel is not reconfigurable part of the
infrastructure network.
3.3.3 Electricity Supply Channel
The structure (way of distribution) of the network can
be changed to optimize the electrical model of the
network.
3.4 System Ontology
Integrated resource supply network pursues the goal
of transporting gas, electric, and heat resources from
producers to consumers. Visually such a network can
be represented as a connected graph (Figure 1). The
paths in this case can be called channels and divided
into three types (gas, electricity, heat channels).
Objects are divided into four types - supplier,
consumer, storage, transformer. For every element we
can also define subspecies, based on the relationship
of these objects to one or another type of resources.
Multiagent Resource Planning System for Utility Provision
435

In the developed system, the description of the
main elements was done in the network ontology
editor. It allows creating the predefined ontology
classes of objects, to assemble the network, start
planning, and simulate the process of resource
distribution in real-time.
Figure 1: Ontology of a problem domain.
Network ontology editor allows the creation of
the predefined and new classes of main and auxiliary
objects (substations, solar panels) to assemble the
network. New object classes can be included in the
network by extending the ontology and adding classes
of appropriate agents.
3.5 Description of Planning Algorithms
3.5.1 MAS Approach
In this project MAS implies matching of every object
with its own software agent (SA). SA description
includes the characteristics of the simulated object
that are stored and can be changed in the ontologically
descriptive knowledge base (network ontology
editor). Dynamically generated solutions are
achieved in the process of communication of agents
that is carried out by transmitting the predefined types
of messages.
The optimization problem of the model is solved
based on the market approach. It can be described as:
expression of all optimization parameters is
developed through universal cost
characteristics (internal virtual currency);
the rules of agents' behaviour aimed at
increasing the local profit of every agent by
reducing the costs in the virtual currency,
which leads to dynamic improvement of the
network parameters;
automatically finding the optimal dynamic
equilibrium of the multiagent system by
exchanging virtual currency;
applying internal agent penalty and bonus
functions to control the dynamics of the
network automatically;
use of scalar convolution on parameters of
optimization of the network agents' state;
use a component-by-component variation of
optimization parameters of the multiagent
system in order to align the indicators.
The proposed multiagent technology based on the
market approach provides universal and dynamic
optimization for software-configurable networks.
3.5.2 Type of Agents
In the developed system, the planning and resource
allocation task is solved by agent's negotiation and
successive approximations from essential, simple,
fast solutions to a more complex and efficient one
according to the available time. Software agents
optimize their target parameters, identify conflicts,
negotiate, make concessions and achieve a solution in
the interests of the whole system.
The main types of agents in the developed system
are:
Order agent (represents the consumers and
requests for specific resource. Every consumer
can generate various number of orders for
different resources. Every request creates a
separate agent).
Scene agent (system agent. Responsible for
agent’s management process).
Resource Agent (represents the suppliers and
amount of resources of various type can be
provided. Every supplier creates one agent for
every type of available resource).
3.5.3 Initial Parameters and General
Planning Description
Every consumer has its own resource consumption
plan, visually represented (Fig. 2) as a two-
dimensional graph with the axes of time and volume
(GСal, m3 and kW), respectively, with discretization
by hours/days. Users set consumption plans with a
monthly horizon based on the average rate typical for
this area.
Users set up, edit, and approve the plans privately.
The system summarizes requests, creating three
aggregated plans for each type of resource in general.
The system then identifies peaks in these
aggregate schedules and starts the negotiation
process. It looks for the consumers who have invested
the most significant contribution to the plan and then
starts to trade to decrease request and ensure the
sufficiency and stability of the whole plan.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
436
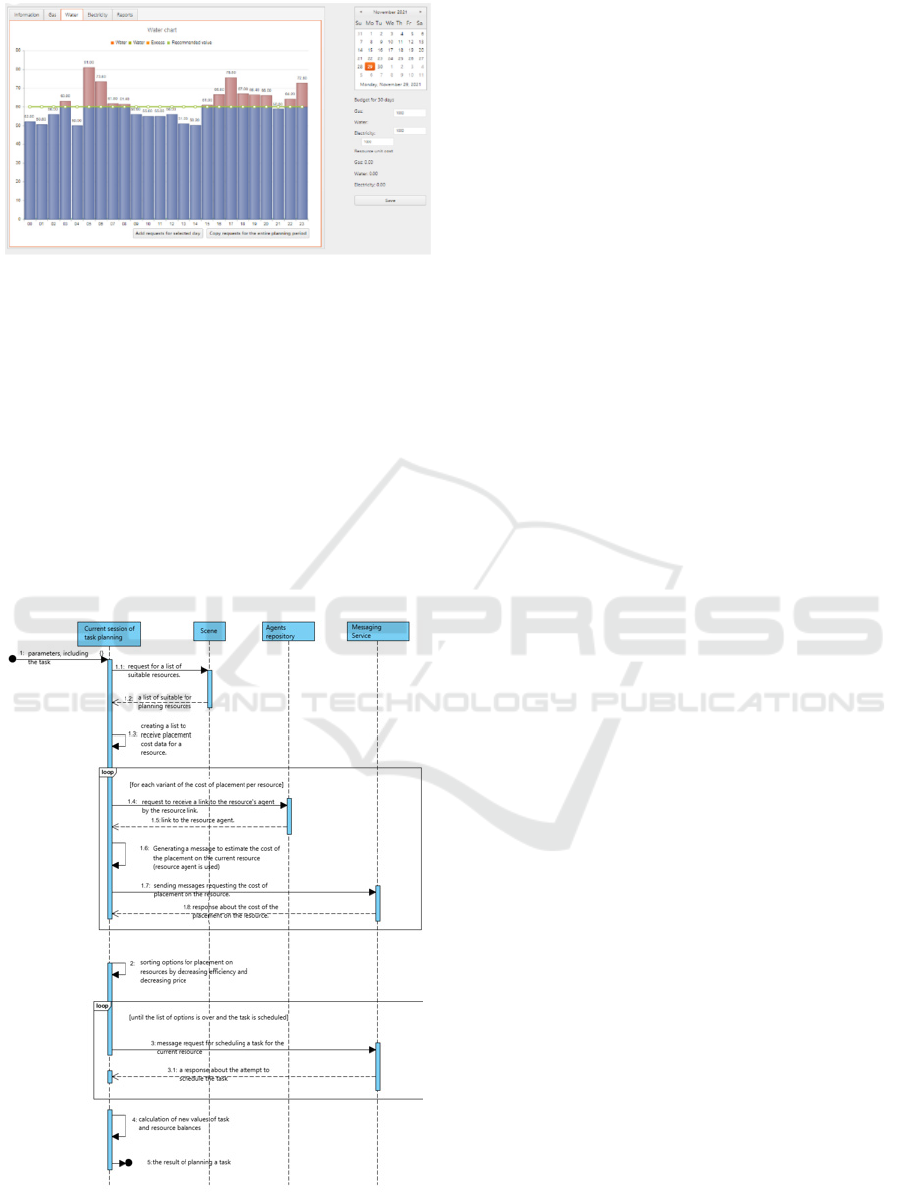
Figure 2: Consumption plan.
After negotiating, the system approves a resource
consumption plan that satisfies all users. There is now
a penalty if consumers use fewer/more resources than
requested and planned as a preventive measure
implemented to oblige consumers to comply with the
established plan.
There are three main phases of planning in the
system: initial flat planning, proactive orders and
resources phases.
3.5.4 The Initial Flat Planning Phase
The initial planning phase is shown on Fig.3.
Figure 3: Flat planning diagram.
The flat planning phases runs as follows:
a) The Order agent receives a scheduling request
message from the Scene agent.
b) The Order agent determines the list of potentially
suitable resource suppliers for planning this
order.
c) A request to the Scene is generated to obtain a
list of resource suppliers capable of performing
the order. Capability is based on the type of
energy resource, network channels, and links
between suppliers and consumers.
d) A list of resource suppliers suitable for the order
is returned.
e) The Order agent subscribes through the message
service to receive information from the Resource
agents about the price needed to perform the
request.
f) Through the agent repository, the Order agent
receives the list of Resource agents (received in
step C) and forms a list of potential further
request messages for the price of placement of
the request.
g) Through the message service, the Order agent
sends to every Supply agent a request message
for the price of order placement for a certain time
interval. The message specifies the size of the
request, the time interval from t1 (now) to t2
(planning horizon). On this step only open and
available slots are taken into account.
h) The Order agent gets responses from the
Resource agents to the request-message about the
price and time. The result is a set of all possible
placements on suitable resources. The answer
message can provide several variants of one
order placement because it can fit several
variants in the planning interval due to the
different prices at all possible t1-t2 time
intervals.
i) The Order agent sorts the possible variants and
keeps those where the price is less than the initial
amount of virtual money left.
j) On every received interval a set of possible
variants of placement is determined to calculate
the value of the target function. Two values sort
the obtained list: decreasing of the target function
and the price of resource placement.
k) The list of sorted options for order placement is
used by the Order agent. It sends the planning
request message and tries to schedule the order
on the resource - first in the list. The message
contains the order ID, the desired time, the price
in virtual currency that the order can pay for the
placement.
Multiagent Resource Planning System for Utility Provision
437
l) Upon the receiving of a message of successful
order placement, an amount equal to the
difference of the initial amount of money and the
cost of scheduling for the selected resource is
credited to the virtual currency account.
m) When the order is successfully scheduled, the
Resource agent credits the amount received from
the system to his account.
n) In case of the order is not scheduled the next
possible resource from the list receives a request
for order placement. The planning can be
unsuccessful because of the increase in the
resource rate at the requested interval, or there is
another order on this time interval, or the starting
time of the order left.
o) In case of the order does not find the appropriate
resource (from the list) and allocation place, it
stays unplanned.
3.5.5 Phase of Proactive Analysis and
Redistribution of Orders
The system has the option of proactive agent’s
behaviour and order analysis (agents proactively look
for better options to place the order after the
completed first round of planning). In this case, the
negotiation process runs as follows:
a) The Scene agent selects all the orders that are
planned but not yet executed at the moment.
b) For each selected order, the current value of its
target function is calculated.
c) The list of selected orders is sorted by the
ascending value of the target function.
d) The scene agent sends request messages for the
moving price for a certain number of the most
dissatisfied with its placement orders (at the
beginning of the list).
e) The Order agent that receives the message
requests a Scene agent the list of resource
suppliers capable of performing the required list
of orders and sorts it according to their
desirability.
f) For each resource from the received list
(including the current resource supplier where
the order is currently planned), a sample of
possible placement points is made, taking into
account the order size, performance, minimum
time step (ξ) and planning horizon (T). In Fig. 4,
sample points are indicated with round dots.
Figure 4: Sample point for order placement.
g) For all selected sample points, the Resource
agent calculates and sends the Scene agent the
price for placing the order.
h) In case this time interval is already occupied with
scheduled orders, the system selects the orders
that interfere.
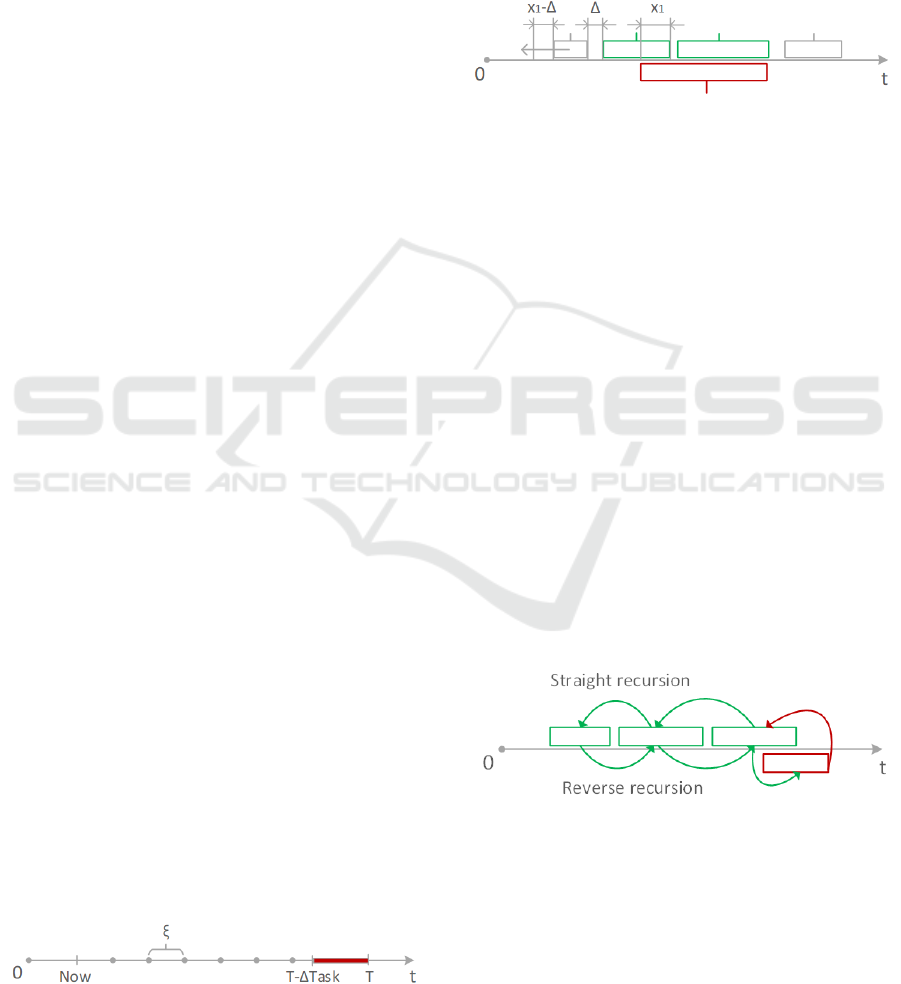
i) The Scene agent sends the request to the
preselected orders for the possibility to move for
the specified time left or right (Fig. 5).
Figure 5: Scheduled orders (green) interfere with the new
order (red).
j) The preselected Order agents receive the shift
request and start the process of negotiation with
the Resource agent.
k) The preselected Order agents send the request to
the corresponding Resource agent to find out the
price of placing the order on another time
interval.
l) If moving to the new time interval influences
other scheduled orders, their agents also request
to move. This request contains the pre-calculated
value and direction of the shift. Recursive
descent continues until the next order to be
shifted can move to the new position unhindered,
or up to the counter limiting the recursion depth
(set in the settings).
m) In the reverse recursion, the affected agents send
response messages containing information about
all required moves and its total cost (Fig. 6).
n) As a result, each placement point has its cost. The
cost is calculated as the price for the resource and
the price for moving the affected orders.
Figure 6: Straight and reverse recursion.
o) From the whole set of possible placement points,
the system excludes those with the price
exceeding the order's available virtual money.
Next, the system excludes allocation options that
do not improve the target function's value if
approved.
p) The remaining set of allocation points is sorted in
descending order of their efficiency, expressed in
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
438
improving the value of the system's target
function. In case of equality, the points with less
value are preferred.
q) In the response message (for the Scene agent),
the Request agent specifies the full cost and the
array of required shifts necessary to move the
request to the sorted set's first (best) point.
r) Changes are approved and performed if the total
cost specified in the message is less than the sum
of the virtual money of the Order agent and the
virtual money returned by resources for
unscheduling the order.
s) Prior to reallocation, the system checks the
relevance of the schedule and it is subsequently
blocked. If changes are detected in the schedule,
the reallocation is not performed.
t) As the next step the system tries to remove all
orders of the schedule affected by the
reallocation. If unsuccessful, the reallocation is
not performed, and the schedule returns to its
original state.
Elements removed on the previous step are moved
to new positions.
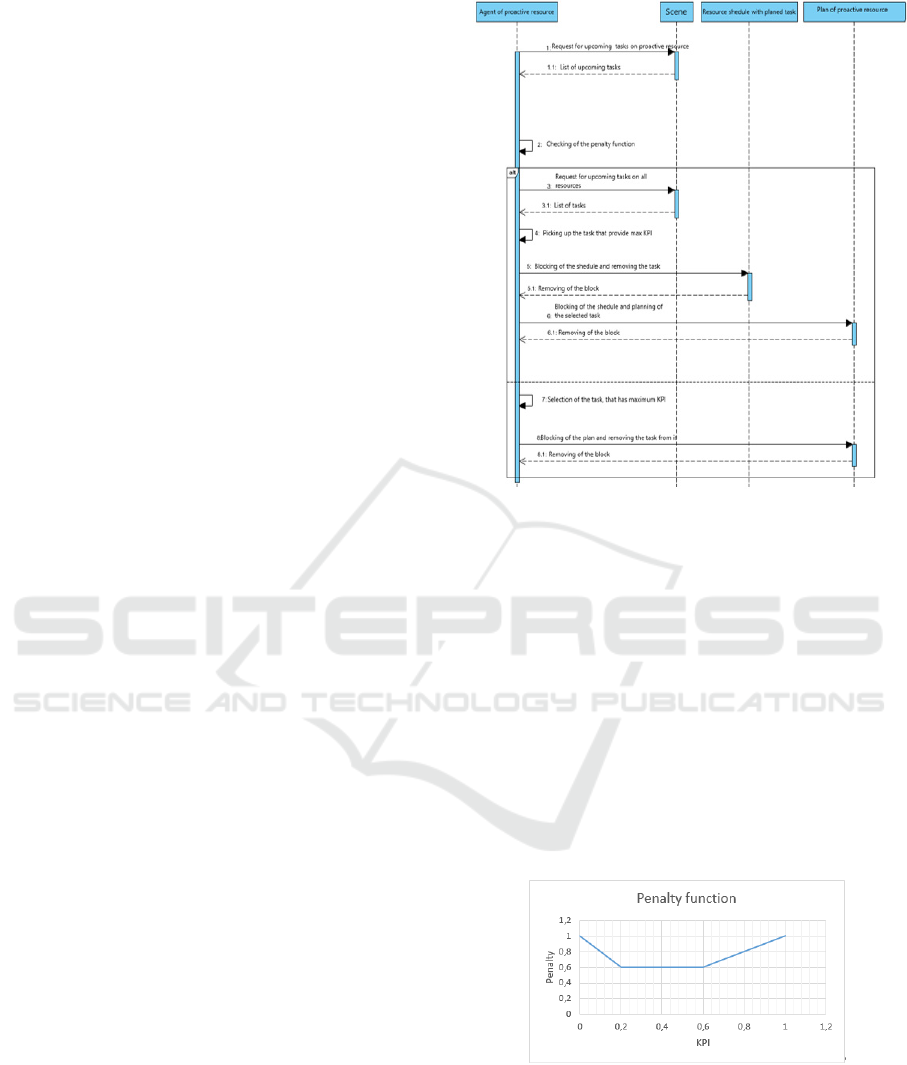
3.5.6 Phase of Proactive Resource Analysis
and Load Redistribution
The system has the option of proactive resource
analysis (agents proactively look for better resource
load options after the completed first round of
planning). In this case the negotiation process runs as
follow:
a) The order whose de-scheduling leads to the
highest efficiency of the system is selected.
b) The order is removed from the schedule (in this
case the schedule of proactive resource is
blocked from editing by other processes):
The virtual money paid for placement in the
schedule is returned.
The data about the old placement on the
resource's schedule is deleted.
The Order agent send the new request for
planning.
If the process is unsuccessful at any stage - the
schedule and orders are returned to the initial
state (before the reallocation attempt).
Process of proactive analysis and redistribution of
orders and resources is shown on Fig.7.
Figure 7: Proactive agents diagram.
3.5.7 Penalty Function
The penalty function (Fig. 8) is used to vary through
the special admin. user interface the agent’s objective
function. It makes possible to increase or decrease the
level of agent’s mobility.
Depending on the value of the current KPI, the
components of the agent's objective function have
different characteristics with a maximum at the
optimum value.
On the interval (0, 0.2), when resource proactivity
is activated, step 6 is executed (Fig. 7), on the interval
(0.2, 0.6) step 8 is executed, and on the interval (0.6,
1) step 7 is executed.
Figure 8: The penalty function.
The penalty function can be adjusted to the
specific task or certain logic of the model. In the
developed system and performed test cases the
penalty function is connected with the maximum load
of the suppliers. As the KPI equal the load, the
Multiagent Resource Planning System for Utility Provision
439
minimum penalty equal to the optimal modes of
equipment.
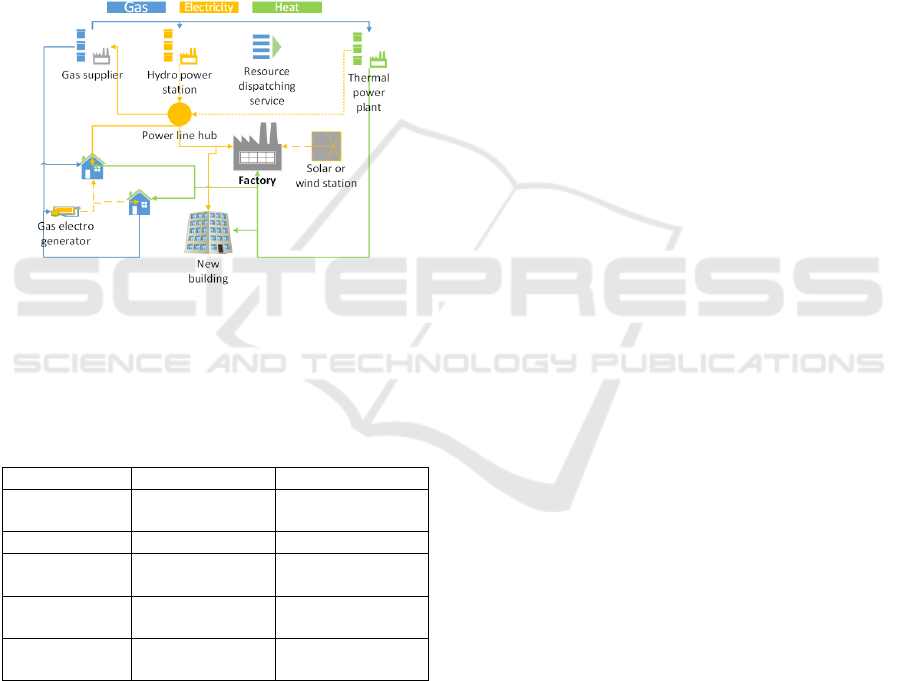
3.6 Developing Scenarios and
Performing Tests
3.6.1 Initial Problem Statement for Test
Scenario Development
For the test scenario the small village had been
chosen. The network and objects configuration of the
village as a set of suppliers and consumers of
resources is presented in Figure 9 (five suppliers of
three different types of resources).
Figure 9: Configuration of the test network.
The parameters of the suppliers are presented in
Table 1. Every supplier can change and decrease the
amount of produced resources.
Table 1: Parameters of the suppliers.
Supplie
r
Resource type Max. production
Hydroelectric
p
ower
p
lant
Electricity 150/225 KwH
Gas supplie
r
Gas 60000 m3/Month
Thermal
p
ower
p
lant
Electricity/Heat 170 KwH
Thermal
p
ower plant
Electricity/Heat
170 KwH /1800
m3/month
Wind power
station
Electricity 30 KwH
It is assumed that every object has access to the
dispatching service to change the rate of consumption
of resources. All objects have sensors to count the
current level of consumption of resources.
The simulation starts after formalizing the
network of consumers and suppliers of resources,
defining their relationships and parameters. During
the modelling process it is possible to enter additional
events (new additional demand) that influence and
refine consumption forecasts. Other types of events
(new consumer or supplier, issues with the network,
revise of the price) may also change the general
forecasts and the prices and plan of the delivery can
be dynamically recalculated.
In this context, the developed system can show
how intelligent planning and the forecast availability
can reduce the production costs for suppliers and
reduce the price for the users.
3.6.2 Performing Tests
To prove the concept, the test scenarios were
conducted. In the modelled scene a village with 15
private houses with consumption rates is slightly
deviating from the average normative values. The
degree and vector of deviation were set by the system
for each object individually in an automatic random
way, taking into account the given constraints.
Additionally, to the basic scenario, a gas-electric
power generator can be used by private homes. The
factory, with predefined schedule of consumption,
with a given slight fluctuation. The factory has its
own source of energy as a set of solar panels.
Fluctuation in the volume of electricity consumption
by the factory depends on the solar panels capacity.
Thermal power plant loaded to 30% of resource
capacity The load on the turbines of the hydroelectric
power plant is 80%.
All presented consumers are connected to all
types of resources. All suppliers are consumers of all
resources except those that they produce themselves.
Figure 9 shows a simplified diagram of the network
topology designed for the experiment.
Having the initial data, the system builds the
consumption plan of all three resources defining the
peak hours of electricity. As the next step the system
in the proactive phase rebuild a plan reducing the
peak hour’s consumption.
After the basic scenario, new external conditions
of increased demand for electricity from the factory
were implemented. This case leads to the additional
production of electricity by the thermal power plant,
what leads to the additional production of heat for the
lower price for the user in public heat supply network.
The results of the planning in Figure 10 show the
changes in the price of the utilities for users before
and after implementation of the system.
It is shown, that adaptive rescheduling in the
network of objects connected in one smart grid and
multiagent resource planning system for utility
provision in cooperation with solar panels installation
can reduce the price of the electricity more than 2
times.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
440

Figure 10: Results of the experiment.
4 CONCLUSIONS
Multiagent resource planning system for utility
provision is designed to: improve the efficiency of
utility model by applying real-time planning. It helps
to optimize the production-consumption model, make
short-term and long-term planning for optimal
operation modes and effectively balance the market
in local micro grids and more complex smart grids.
The multiagent system implements a variety of
methods for the distributed solution of complex
problems.
The solution is sought based on the model of
interaction of software agents, which negotiate in
achieving the goal and seek consensus, for which
conflicts are sought and resolved by mutual
concessions, to achieve the most rational solution to
the common problem.
The system optimizes the processes of production
and consumption of three types of resources in one
model and present the schema for gas, heat, and
electricity supply systems integrity. It shows an
individual approach for every order and resource
through taking into account the various strategies and
criteria, preferences and constraints of all players.
ACKNOWLEDGEMENTS
This work was supported by the European Regional
Development Fund under the project AI&Reasoning
(reg. no. CZ.02.1.01/0.0/0.0/15_003/0000466).
REFERENCES
Report Australian energy operator (2020). Electricity
Statement of Opportunities – https://aemo.com.au/
R. F. Brena, C. W. Handlin, P. Angulo (2015). A smart grid
electricity market with multiagents, smart appliances
and combinatorial auctions. IEEE First International
Smart Cities Conference (ISC2).
C. P. Nguyen and A. J. Flueck (2015). A Novel Agent-
Based Distributed Power Flow Solver for Smart Grids.
IEEE Transactions on Smart Grid, vol. 6.
K. Boudaoud, H. Labiod, R. Boutaba, Z. Guessoum (2000).
Network security management with intelligent agents.
NOMS IEEE/IFIP Network Operations and
Management Symposium.
W. Li, T. Logenthiran, W. L. Woo (2015). Intelligent multi-
agent system for smart home energy management.
IEEE Innovative Smart Grid Technologies - Asia
(ISGT ASIA).
B. Omarov, A. Altayeva (2018). Towards Intelligent IoT
Smart City platform Based on OneM2M Guideline:
Smart Grid Case Study. IEEE International Conference
on Big Data and Smart Computing (BigComp).
Le D.P., Bui D.M., Ngo C.C. (2018). FLISR Approach for
Smart Distribution Networks Using E-Terra Software.
A Case Study. Energies.
C. Shum (2106). Modelling and simulating
communications of Multiagent Systems in Smart Grid.
IEEE International Conference on Smart Grid
Communications (SmartGridComm).
Svítek M., Skobelev P., Kozhevnikov S. (2020) Smart City
5.0 as an Urban Ecosystem of Smart Services. Service
Oriented, Holonic and Multi-agent Manufacturing
Systems for Industry of the Future. SOHOMA 2019.
Studies in Computational Intelligence, vol 853.
Springer, Cham
M. Morte (2016). E-mobility and multiagent systems in
smart grid. 17th International Scientific Conference on
Electric Power Engineering (EPE).
Jordán, J., Palanca, J., Del Val, E., Julian, V., Botti, V.
(2018). A Multi-Agent System for the Dynamic
Emplacement of Electric Vehicle Charging Stations.
A. Loni, F. Parand (2017). A survey of game theory
approach in smart grid with emphasis on cooperative
games. IEEE International Conference on Smart Grid
and Smart Cities (ICSGSC).
O. P. Mahela et al. (2020). Comprehensive overview of
multi-agent systems for controlling smart grids. CSEE
Journal of Power and Energy Systems.
O. Přibyl, T. Horák (2015). Individual Perception of Smart
City Strategies. Smart Cities Symposium Prague
(SCSP).
Multiagent Resource Planning System for Utility Provision
441
