
Accelerated Variant of Reinforcement Learning Algorithms for Light
Control with Non-stationary User Behaviour
Nassim Haddam
1
, Benjamin Cohen Boulakia
1
and Dominique Barth
2
1
LINEACT - Recherche & Innovation, CESI, Nanterre, France
2
DAVID Laboratory, Paris-Saclay - UVSQ, Versailles, France
Keywords:
Smart Building, Reinforcement Learning, Light Control, Light Comfort.
Abstract:
In the context of smart building energy management, we address in this work the problem of controlling
light so as to minimise energy usage of the building while maintaining the satisfaction of the user regarding
comfort using a stateless Reinforcement Learning approach. We consider that the user can freely interact with
the building and changes the intensity of the light according to his comfort. Moreover, we consider that the
behaviour of the user depends not only on present conditions but also on past behaviour of the control system.
In this setting, we use the pursuit algorithm to control the signal and investigate the impact of the discretization
of the action space on the convergence speed of the algorithm and the quality of the policies learned by the
agent. We propose ways to accelerate convergence speed by varying the maximal duration of the actions while
maintaining the quality of the policies and compare different solutions to achieve it.
1 INTRODUCTION
Energy consumption in buildings forms a large part
of energy consumption world-wide. Indeed, global
buildings account for 30% of total energy in 2019
(GABC, 2020). Energy cost is used to satisfy hu-
man needs, but it is expected that a big part of it can
be saved if resources are managed intelligently. Re-
cent technological advances to capture, store and pro-
cess data have developed at an increasing rate. More
precisely, one of the questions treated by the research
community is to conceive control systems which are
capable of learning human preferences and to deter-
mine which actions to take in order to reduce energy
costs and satisfy human needs.
Related Work: This question has attracted a lot of
attention in the recent years, be it on thermal con-
trol (et al, 2012) (et al, 2018) (Yang et al., 2015), or
light control (Cheng et al., 2016) (Park et al., 2019),
(Zhang et al., 2021).
In light control, most of the methods used are
based on distributions which are extracted from in-
teraction of the user with the building. The first sys-
tems which were used were equipped of PIR sen-
sors and did simply switch on/off the lights according
to room occupacy (Neida et al., 2001), (F.Reinhart,
2004), (Jennings et al., 2000). But those approaches
wasted energy due to Time Delays in sensors activa-
tion (Nagy et al., 2015). In (Garg and N.K.Bansal,
2000), a statistical method based on frequency of
Time Delays to model the occupant’s activities is pro-
posed. The Time Delay is adapted to each occupant
and achieved energy saving close to 5%. The work
on (Nagy et al., 2015) was inspired by (Garg and
N.K.Bansal, 2000) to include illuminance levels in
the model. We argue that these methods are limited
in that they do not directly optimize energy usage.
A more direct way to control lighting is to opti-
mize energy use by controlling the signal (which rep-
resents the light intensity) so as to optimize an ob-
jective function. This approach requires the model to
have knowledge about user preferences. One way of
doing so is by means of a model of user behavior. Sev-
eral models have been proposed to model user com-
fort in terms of visual comfort (Mardaljevic, 2013),
(P. Petherbridge, 1950), (Einhorn, 1979) but the ma-
jority of those models presuppose that we know cer-
tain elements of the environment which aren’t readily
available. The models might need for instance the in-
clination of the head, the number of glare in the visual
field of the user, the distance to lights sources...etc.
Our Contribution: An alternative to this approach
is to use Reinforcement Learning (RL). Contrary to
thermal comfort, there is very little work done to
control signal value using Reinforcement Learning
(Cheng et al., 2016), (Park et al., 2019). Reinforce-
ment Learning is a really flexible framework and al-
lows the system to learn optimal control policies (with
78
Haddam, N., Boulakia, B. and Barth, D.
Accelerated Variant of Reinforcement Learning Algorithms for Light Control with Non-stationary User Behaviour.
DOI: 10.5220/0010987900003203
In Proceedings of the 11th International Conference on Smart Cities and Green ICT Systems (SMARTGREENS 2022), pages 78-85
ISBN: 978-989-758-572-2; ISSN: 2184-4968
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

or without a model), some behaviour specified by the
optimization of a reward signal coming from the en-
vironment. In the present work, we study more effec-
tive variants of the algorithm proposed on (Haddam
et al., 2020) and propose ways to accelerate conver-
gence. The same user model was used, special care
were given to its parameters and their relation to the
performances of the algorithms, especially the sensi-
bility of the user and its memory.
Provided that we are in a setting where the user
has memory of the history of the signal, where low
signal values are a source of discomfort for the user,
and where we reduce energy by reducing signal value,
the contributions of the present paper are as follows.
In section 3 we compare the performances of different
stateless Reinforcement Learning algorithms which
are presented in section 2. We also provide detailed
insight on the performance of the LRI algorithm (as
proposed on (Haddam et al., 2020)) and the pursuit
algorithm, which is generally faster on stationary en-
vironments. In section 4, we study the performances
of the pursuit algorithm for different set of actions of
the action space. We also propose ways to improve
speed and quality of convergence of the proposed al-
gorithm. Finally, in section 5 we present some final
remarks and perspectives regarding our work.
2 CONTROL WITH RL
In this section, we present how to model our problem
using Reinforcement Learning. We start by introduc-
ing some notations in order to define the actions of
the agent. We then proceed to define how the policy
is represented in our problem. Finally, we present the
Reinforcement Learning algorithms we studied. We
emphasize that the goal here is not to learn or guess
the user’s model, even if we use a user model for sim-
ulation purposes as modeled in (Haddam et al., 2020).
We consider that the actions available to the agent
are a bunch of speeds of light signal decrease. Those
are the slopes the signal takes during its decrease. We
define the set of actions AC = {sl ∈ R
−
∗
| sl
max
≤ sl ≤
sl
min
} where sl
min
and sl
max
are the smoothest and
steepest slopes available to the agent. The control sys-
tem selects a slope sl and then proceeds to apply the
selected control strategy time step by time by lower-
ing the signal according to the selected slope. The
maximal duration of an action noted max dur is set
before the control starts. Upon applying a slope, if
the user intervenes, or if the user does not intervene
during max dur time steps, the action chosen by the
agent is stopped and the agent updates its policy as to
chose good control strategies more often.
We propose multiple ways to set the maximal du-
ration of the actions. The first way is obviously to
impose an infinite maximal duration. In this case, the
system has no say on how long an action might take,
and only the interventions of the user matter. The sec-
ond way is to impose a fixed duration limit. In this
case, the maximal duration of all the actions is the
same and doesn’t change with time (we call it a static
maximal duration). The third way is to change the
maximal duration with time. This case is named dy-
namic maximal duration. For this case, the maximal
duration is the same for all actions, but changes de-
pending on past behaviour of the user. The idea is
that the current action could be deactivated to choose
another one if the user takes much longer to intervene
than usual. We propose two update rules for dynamic
maximal duration.
We consider the intervention time of an action to
be the time between the moment where the action is
chosen and the moment where the user intervenes.
The update rules of dynamic maximal duration de-
pend both on the average and the standard deviation
of the intervention time. In this case, the action to be
taken could be chosen again if the duration of the cur-
rent action exceeds the average duration of the user’s
intervention by a factor of the standard deviation of
the intervention time (time of the current action >av-
erage intervention time + const × standard deviation
of the intervention time). The first update rule for the
dynamic maximal duration is to set it as the sum of
the average of the intervention time and a factor of
the standard deviation of the intervention time (we
name it update mean var interv). The second update
rule is the same as the first update rule by assuming
that the law of probability of the intervention time of
the user is an Exponential probability law (even if the
memory-less assumption of the Exponential distribu-
tion doesn’t hold in the context of a non-stationary
user). The last update rule gives a way to approx-
imate the standard deviation and alleviates the need
to memorize past intervention times and thus might,
at least, reduces computation time. For this rule, the
standard deviation is therefore the root square of the
mean, and we call it update mean interv.
As stated previously, we use learning algorithms
using the framework of Reinforcement Learning (RL)
(Sutton and Barto, 1998). The policy of the agent is
represented using a stochastic vector. The vector is
updated each time the action finishes, and is thus de-
fined for each k-th user intervention. The policy of
the agent following the k-th user intervention is rep-
resented by the stochastic vector p
k
∈ [0, 1]
|SL|
where
p
k
[i] is the probability of choosing the i-th least steep
slope of SL.
Accelerated Variant of Reinforcement Learning Algorithms for Light Control with Non-stationary User Behaviour
79

The reward of an action applied by the agent from
time step n to time step n
0
is decomposed in two parts:
a part reflecting energy consumption noted ren
n,n
0
and
a part reflecting user comfort noted rcs
n,n
0
. Together,
those two parts form the complete reward which is
r
n,n
0
= ren
n,n
0
.rcs
γ
n,n
0
where γ is a strictly positive real
number. The parameter γ represents how strongly we
reward the control system for satisfying the user. De-
tails concerning the reward are on (Haddam et al.,
2020).
2.1 The Learning Algorithms
The learning algorithms which were selected for our
work are represented as RL agents where the al-
gorithm used for learning is LRI (Linear Reward
Inaction) (Thathachar, 1990), LRP (Linear Reward
Penalty) (Thathachar, 1990), and the pursuit algo-
rithm (Kanagasabai et al., 1996). The remainder of
this section presents the LRI algorithm, the LRP and
the pursuit algorithm.
In the LRI algorithm, the policy is represented as
a stochastic vector and is updated as to increase the
probability of the action selected by the agent linearly
to its reward. Suppose a strategy sl has triggered the
k-th intervention of the user. Suppose sl has index
i[sl] in vector (policy) p
k
. Then, according to LRI, p
k
is updated for each k as follows
p
k+1
:= p
k
+ α.r
n,n
0
.(e
i[sl]
− p
k
) (1)
where e
i[sl]
is the unitary vector of unit value in the
component associated with the slope sl in p
k
. An-
other variant of LRI which is called the LRP (Lin-
ear Reward Penalty) decreases the probability of the
actions which didn’t lead to any reward (in addition
to increasing the probability of the actions leading to
good reward like LRI).
The idea of the pursuit algorithm is to reinforce
not the action chosen at the current moment, but the
action that has the best estimate among the available
actions. To this end, the algorithm will have to keep
in memory the estimates constructed from the rewards
obtained by each action. The probability of the action
which has the best estimate is increased linearly. If
we pick the same notations as before, we can sum-
marize the operations of the pursuit algorithm by the
formulas which follows. The update of the policy in
the pursuit algorithm is
p
k+1
:= p
k
+ α.(e
h
− p
k
) (2)
where h is the index of the best action according to
the estimate of the algorithm.
3 COMPARING RL
ALGORITHMS
In this section, we start by comparing the pursuit al-
gorithm and the LRI algorithm (in terms of speed and
quality of convergence) for a typical setting we con-
sidered to get a visual feel for the behaviour of the
algorithms. We then do a more systematic compari-
son of the LRI, the LRP and the pursuit algorithms to
provide quantitative estimation of the speed of con-
vergence independently of the parameters of the sim-
ulation. This comparison allows us to select the most
appropriate algorithm for our problem.
3.1 The Pursuit Algorithm
The experiment we do here extends on (Haddam et al.,
2020) done on the LRI algorithm. We run the pur-
suit algorithm and the LRI 30 times for 1000000
time steps with the user with medium-term memory
(the value of the present effect parameter pe is set
to pe = 0.35). We select the user with medium-term
memory (pe = 0.35) to not draw conclusions on ex-
treme cases (memory which is too small or too large).
In order to observe the behaviour of the algorithm, the
learning rate is fixed to 0.001. The value of the learn-
ing rate was chosen as low as possible to allow the
algorithm to converge at a reasonable time. All the
estimates are initialized to 0 for the pursuit algorithm
(a classical choice which is relevant here because the
agent is pessimistic in that all the slopes are bad). The
reward is monitored during the run. We take the mean
of the reward over the executions. The results are de-
picted on the curves (Figure 1) containing the mean
values. The stochastic vectors at the end of each run
are outlined in Figure 1.
We note from the curves that the pursuit algo-
rithm converges a lot faster than the LRI algorithm
(nearly 10 times faster). The policies learned by the
pursuit algorithm are also of better quality, as the al-
gorithm converges nearly every time. As the pur-
suit algorithm estimates directly the reward of the ac-
tions, it may form a better way to deal with the ex-
ploration vs exploitation dilemma characterizing Re-
inforcement Learning problems, because as the agent
gains knowledge from the environment, the action es-
timated to be the best changes less and less frequently,
and the stochastic vector converges more rapidly to it.
But because only the probability of the best ac-
tion according to the agent is updated, the agent may
also be tempted to exploit the learned actions more
than necessary. Furthermore, the case of study con-
sidered in this paper is such as the environment is
non-stationary because its state changes in response to
SMARTGREENS 2022 - 11th International Conference on Smart Cities and Green ICT Systems
80
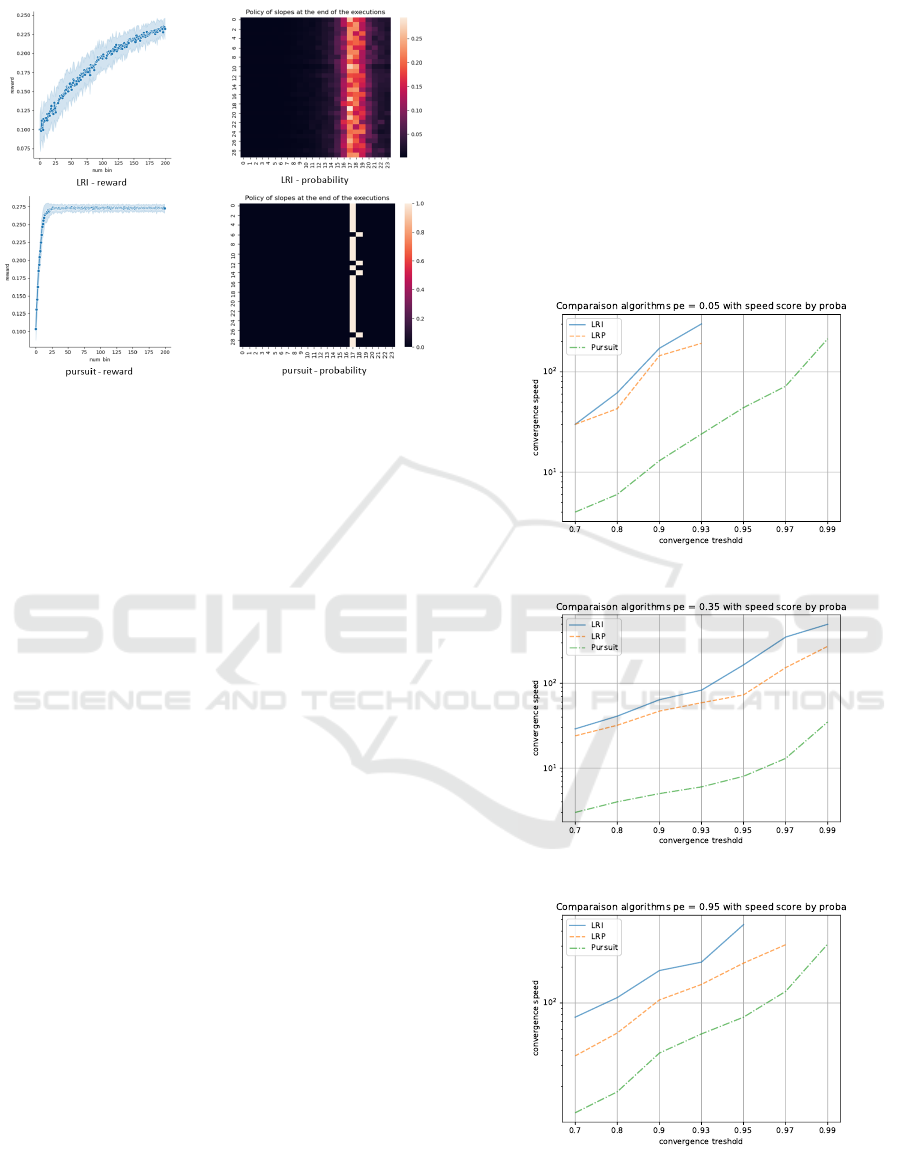
Figure 1: The LRI vs. the pursuit algorithm - 1000000 time
steps. For the left column, the x-axis is the time, the y-axis
is the reward. For the right column, the x-axis is the index
of the slope, the y-axis is the execution number.
the agent, which differs sensibly from the cases most
commonly studied by researchers. For those reasons,
we present in the next subsection a more quantitative
comparison between various Reinforcement Learning
algorithms.
3.2 Comparison of RL Algorithms
In this section, we compare different (stateless) Re-
inforcement Learning algorithms to identify the algo-
rithms most suitable for our problem. We took differ-
ent parameters of the algorithm and the user. The al-
gorithms are tested during 3000000 time steps (subdi-
vided as before into intervals of size 5000 time steps)
for 30 runs for different hyperparameters set. The al-
gorithms are then compared by taking the best hyper-
parameter for each one. A criterion for quality of con-
vergence and speed of convergence were chosen to
account effectively for the comparison. For each algo-
rithm, the best hyperparameter is chosen by first tak-
ing only those for which the algorithm is considered
to be convergent (i.e. when the empirical stochastic
vector has a predefined fraction of its weight concen-
trated on the best action and one of its left or right
neighbors). After filtering the bad values of the hyper-
parameters by the convergence criteria, the best value
is chosen by then taking the value of the hyperpa-
rameters which has achieved convergence the fastest
(using the same threshold as the first step). This se-
lection process was applied for different convergence
thresholds (for the values 0.7, 0.8, 0.9, 0.93, 0.95,
0.97, 0.99) each time taking the best hyperparame-
ters and the results are shown in Figure 2. Figure
2 shows a comparison on the speed of convergence
of the above-mentioned algorithms for the values of
pe considered earlier (long term user for pe = 0.05,
medium term user for pe = 0.35, and short term user
for pe = 0.95 from top to bottom). The abscissa axis
represents the convergence thresholds, and the ordi-
nate axis represents the number of intervals required
for each algorithm to converge at the corresponding
threshold. The values on the y-axis are displayed on
logscale for good visualization. Algorithms which
didn’t converge for any of the tested values of the hy-
perparameters were not included on the figure.
(a) Comparison with pe = 0.05.
(b) Comparison with pe = 0.35.
(c) Comparison with pe = 0.95.
Figure 2: Comparison of the speed of convergence for the
algorithms : LRI, LRP, the pursuit and the hierarchical pur-
suit.
Accelerated Variant of Reinforcement Learning Algorithms for Light Control with Non-stationary User Behaviour
81
We note that there are roughly two kinds of algo-
rithms in terms of speed of convergence, those which
takes really long to converge or don’t converge at all
for all types of users (LRI, LRP) and the ones which
converges very well on all kinds of users (pursuit).
In terms of the memory of the user and its relation
with convergence speed, we notice that the case of a
medium-term memory user (pe = 0.35) seems to be
the easiest one for all the algorithms considered. The
short-term memory user (pe = 0.95) is challenging
for the algorithms, probably because the user changes
abruptly if the next action is too different from the
current action (especially for steep slopes). The case
of a long-term memory user (pe = 0.05) is also hard
because the reactions of the user depend on control
far in the past so that the behaviour of the user might
change too much for the same action depending on
past actions chosen by the system. In the following,
we present a discussion on the performances of the
three algorithms.
The LRI and LRP algorithms converge very
slowly (50 to 110 bins). Concerning the LRI algo-
rithm, the most common reason for slow convergence
is that the learning rate has to be set low so that the
agent won’t be stuck on suboptimal action. For the
LRP algorithm, however, which decreases the proba-
bilities of actions not leading to a good outcome. The
slow convergence rate might be better explained by
the fact that the stochastic vector juggles around too
often before leading to good actions.
According to our experiment, the pursuit algo-
rithm seems to be the fastest algorithm (an order
of magnitude faster than LRI and LRP). The update
strategy of the pursuit algorithm and its variants might
form a better way to balance effectively between ex-
ploration and exploitation than LRI. In fact, the best
estimated action changes less and less as the algo-
rithm gains knowledge about its environment. This
could make the pursuit algorithm more stable than
LRI and LRP and allows us to set higher learning rates
for the algorithm without suffering performance loss
as with the LRI algorithm. We can conclude from our
experiment that the pursuit algorithm is the most ade-
quate for our problem, independently of the memory
of the user and the learning rate.
4 ACCELERATION OF THE
ALGORITHMS
We propose in this section ways to accelerate the pur-
suit algorithm which was selected by the preceding
experiments. The first approach to greatly enhance
the speed of convergence of the algorithm is to vary
the maximal duration of the actions (discretization of
the time). The second way to speed up the algorithm
is to determine the best set of actions available to the
agent (discretization of the action space). We also
show how the set of actions available to the agent
greatly influences the speed of convergence of the al-
gorithm.
4.1 Maximal Duration of the Actions
To speed up the convergence of Reinforcement Learn-
ing algorithms in our problem, we propose to dy-
namically change the maximal duration of the actions
while learning. The following experiment shows the
effect of changing the maximal duration of the action
on the speed of learning. The number of executions
is 30 and the number of time steps per execution is
1,500,000. The time is subdivided into sub-intervals
of size 5000 from which we take only the mean of
the values calculated (the reward, the energy, and the
value of the sensibility of the user m). The learn-
ing rate is fixed at 0.002. The experiment was done
for different values of the present effect parameter,
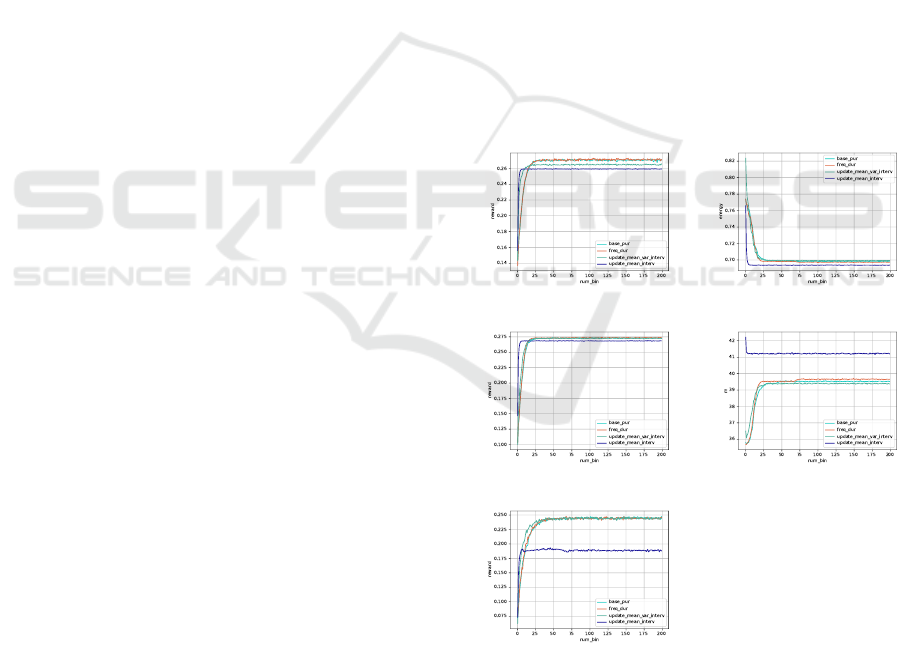
namely 0.05, 0.35 and 0.95.
pe = 0.05 - reward pe = 0.35 - energy
pe = 0.35 - reward pe = 0.35 - m
pe = 0.95 - reward
Figure 3: Comparison of the performances of the algorithm
between different ways to set the decision type and differ-
ent sizes of the memory of the user, long-term (pe = 0.05),
medium term (pe = 0.35) and short-term (pe = 0.95).
The graphs (on Figure 3) show the performance
of the control system with the pursuit algorithm for
SMARTGREENS 2022 - 11th International Conference on Smart Cities and Green ICT Systems
82

Figure 4: Heatmaps of the stochastic vectors at the end
of each run whe pe = 0.35. (a), (b), (c) and (d) are the
cases base pur, freq dur, update mean var interv and up-
date mean interv respectively.
the case where the decision is made at each user in-
tervention (named base pur), set to a fixed maximal
duration (named freq dur). The graphs depict also
the performances of the system with the two ways
to use the update rule of the dynamic maximal du-
ration of the actions. The first one corresponding to
update mean var interv), and the second case corre-
sponding to update mean interv). The left column
of Figure 3 shows from top to bottom the evolution
through time of the reward for the case where pe =
0.35. The right column shows the evolution through
time of the value of energy and the value of m. For
the curves where the maximal duration of an action
is fixed, those durations were the best value among
the values {1, 5, 10, 25, 50, 100} for each value of pe.
For the cases where the maximal duration of the ac-
tions changes, the factor associated to the standard de-
viation is also chosen to be the best value amongst
{1, 2, 3, 4} for each pe. We also display the heatmaps
(Figure 4 for the case pe = 0.35) of the stochastic vec-
tors at the end of training. On the heatmaps, the axes
are labelled by the indices of the slopes (x-axis) and
by the run (y-axis).
From the curves, we can observe that the re-
ward stabilizes the fastest where the update rule
for the maximal duration of the actions is up-
date mean interv for all values of pe. Further-
more, the case update mean var interv also stabilizes
rapidly for the case where we have a long-term mem-
ory user and a short-term memory user (pe = 0.05
and pe = 0.95) and is even a little higher at the be-
ginning of training for the case of a medium-term
memory user (pe = 0.35). The aforementioned obser-
vations show the pertinence of using dynamic maxi-
mal duration of the actions, especially as the conver-
gence speed is better than the case where the decision
time is set to a maximal limit (the cases base pur and
freq dur).
One of the drawbacks of dynamic maximal dura-
tion is that the high convergence speed comes at the
cost of a low reward at the end (especially for the shot-
term memory user, where the state of the user depends
mostly on the present). This can be explained by the
fact that the principle of dynamic maximal duration
of the actions is to stop the slopes (mostly soft slopes
because they are the slowest) before the user inter-
venes, which means that steep slopes will be played
a little more often. The playing of steep slopes trig-
gers more reactions from the user (probably the most
frequently when the user has short memory). But this
phenomenon is a rather mild hindrance because the
user is kept at a state close to its most favorable state
(m = 41 at worst knowing that m
0
= 35, it is 10% of
the maximal possible value for m) and the energy used
to do so is lesser for the dynamic maximal duration
of the actions rules. Only the case where pe = 0.35
is shown, but the conclusions hold even for the other
cases (pe = 0.05, pe = 0.95). We can also see from
the heat maps associated to the medium-memory user
that the algorithm converges close to the best slope
(slope 17) when dynamic maximal duration of the ac-
tions is used (in fact, they converge even for other val-
ues of pe which are not shown here to not clutter up
the reading of the article).
Another relatively mild drawback of the dynamic
maximal duration of the actions is convergence to ex-
actly the optimal action, we observe that the base case
converges more often to the optimal action than the
dynamic maximal duration of the actions cases. We
can, therefore, conclude that controlling the maximal
duration of the actions allows increasing greatly the
speed of convergence of the algorithm.
4.2 Effect of the Number of Actions on
Learning
In this subsection, we study the influence of the num-
ber of actions on the speed of convergence of the al-
gorithm. The experience we present in this subsection
consists in launching for 30 times the control system
for different sets of actions (slopes) corresponding to
different action spaces. Those sets correspond to the
slopes where the gap between two successive slopes
is 5, 10, 15 and 20. Before doing the experiment,
the best slope was calculated for each set of actions
and for each value of pe by repeating them and cal-
culating the mean reward, the mean energy, and the
Accelerated Variant of Reinforcement Learning Algorithms for Light Control with Non-stationary User Behaviour
83
mean value of m during the runs. We note that the
optimal action in terms of the reward is the same for
the set of actions associated with gaps 5 and 15. The
set of actions associated with gaps 10 and 20 have
different optimal actions. The algorithm used is the
pursuit algorithm, where the learning rate is set to the
value lr = 0.001. Each execution has a duration of
1500000 time steps decomposed into intervals of size
5000 where the mean value of the energy, the reward
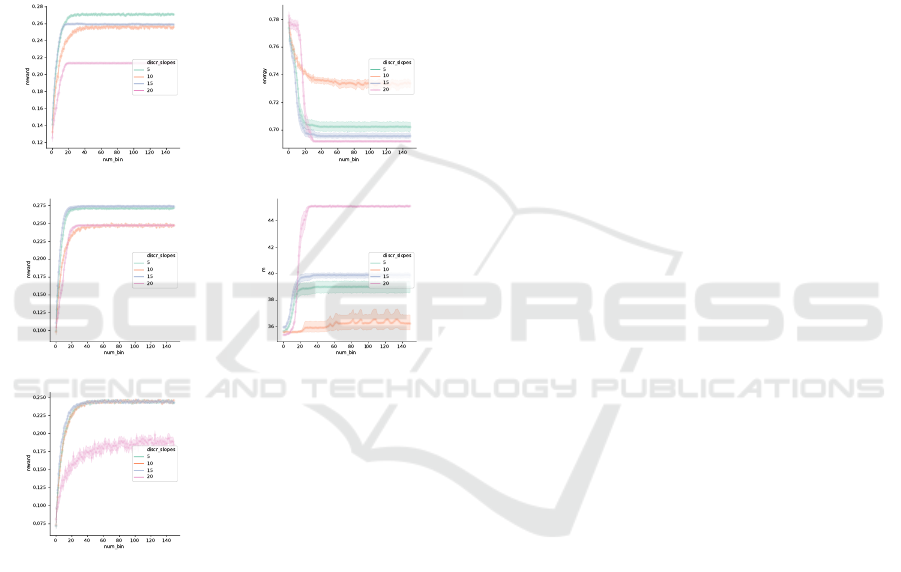
and the value of m are observed. We also calculate
the mean of those values for all the executions. The
results are shown on Figure 5 for each value of pe
(0.05, 0.35, 0.95).
pe = 0.05 - reward pe = 0.35 - energy
pe = 0.35 - reward pe = 0.35 - m
pe = 0.95 - reward
Figure 5: The evolution of the reward (left), the energy (top
right), and the state of the user (center right) for the set of
actions of gaps 5, 10, 15 and 20 for the slopes.
Each row corresponds to the result of the experi-
ment for different values of pe (0.05, 0.35, 0.95). The
left column corresponds to the evolution over time of
the reward for all the values of pe. The right column
corresponds to the evolution over time of the energy
and the value of m for pe = 0.35. We first note that
the system improves over time for all the metrics apart
from the user state (but the user still remains at the ac-
ceptable range because the value of the m parameter
is close to the lowest value m
0
= 35 for all cases).
The second observation we make is that the perfor-
mances of the system do not vary linearly with the set
of actions (this seems to hold for each value of pe)
especially when pe is small. In fact, for the long-term
memory user it is clear that the best set of actions in
terms of speed of convergence are in descending order
5, 15, 10, 20.
Second, let us analyze the medium-term memory
user. We note that the best set of actions is obtained
when the gap between actions is 15 and the perfor-
mances drop the further we go from this set of actions
both in terms of speed of convergence and quantity of
reward achieved by the agent. With the set of actions
where the gap is 20, we note very low energy usage.
On the other hand, the user appears to be in a bad state
relatively to the other cases because the value of m ap-
proaches 45 (half of the signal value interval). The set
of actions associated with the gap value 10 achieves
the same reward as the previous one, but we can see
that energy usage is way higher and the state of the
user is way lower than before. Another observation
we make is that even when the optimal actions are
the same for different set of actions (for example the
5 and 15 set of actions have similar optimal actions),
the behaviour of the user and the algorithm change
qualitatively.
A possible interpretation for the observations
mentioned previously is that there is a trade-off to
be taken into account in this case. If we take a very
coarse set of actions of the action space, the optimal
action (on all sets) may not be on the selected set of
actions which leads the algorithm to learn subopti-
mal actions, but if the set of actions is too dense the
system may take way longer to learn the best action
because the system needs to try all of them enough
times to identify the best action. The selected set
of actions may affect the convergence of the algo-
rithm, even when the optimal actions are the same
for different sets of actions. A possible approach to
deal with those issues is to consider using methods
which handle large action spaces by filtering rapidly
the good actions from the bad ones. Hierarchical
methods (Yazidi et al., 2019) may be a good alter-
native to explore to deal with this drawback. Finally,
we can conclude that the best set of actions is where
the gap is 5 for the user with a long-term memory and
where the gap is 15 for the user with a medium-term
memory. And for a user with a short-term memory,
we also prefer to choose the set of actions associated
with gap 15 because it seems better at the beginning
of learning.
SMARTGREENS 2022 - 11th International Conference on Smart Cities and Green ICT Systems
84

5 CONCLUSION AND
PERSPECTIVES
In this paper, we propose ways to improve the con-
vergence of Reinforcement Learning algorithms for
light signal control to reduce energy costs while sat-
isfying the user. The setting considered in this work
is when the reactions of the user depend not only on
present conditions but on the entire history of the sig-
nal values. Furthermore, we consider the use of a sin-
gle light source and no change in the activity of the
user. We present a detailed study to determine which
Reinforcement Learning algorithm is most appropri-
ate for the problem at hand. The pursuit algorithm
seems to be the way to go for our problem.
In a future work, we consider taking into account
the global lighting environment with several light
sources where the activity of the user could vary in
the building. We also consider to look into the per-
formances of other variants of the pursuit algorithm
(like the hierarchical pursuit algorithm) and compare
its performances with other stateless Reinforcement
Learning algorithms. This comparison will allow us
to make finer conclusions on the behaviour of the al-
gorithms on our problem, and possibly to circumvent
the burden of choosing the best set of actions. Also,
we consider to look into other variants of the Re-
inforcement Learning framework, particularly state-
based Reinforcement Learning. Challenges to do so
include choosing which elements might be relevant as
to determine the state and the size of the state. Other
areas of building control like HVAC control might
also benefit from our work, provided we take into ac-
count inertia phenomena and more complex energy
consumption models in our approaches.
REFERENCES
Cheng, Z., Zhao, Q., Wang, F., Jiang, Y., Xia, L., and
Ding, J. (2016). Satisfaction based q-learning for in-
tegrated lighting and blind control. Energy and Build-
ings, 2016.
Einhorn, H. (1979). Discomfort glare: a formula to bridge
differences. Lighting Research and Technology.
et al, P. M. F. (2012). Neural network pmv estimation for
model-based predictive control of hvac systems. IEEE
World Congress on Computational Intelligence.
et al, S. L. (2018). Inference of thermal preference profiles
for personalized thermal environments. Conference:
ASHRAE Winter Conference 2018.
F.Reinhart, C. (2004). Lightswitch-2002: a model for
manual and automated control of electric lighting and
blinds. Solar Energy, 77:15–28.
GABC (2020). The global alliance for buildings and con-
struction (gabc). Technical report, The Global Al-
liance for Buildings and Construction.
Garg, V. and N.K.Bansal (2000). Smart occupancy sensors
to reduce energy consumption. Energy and Buildings,
32:91–87.
Haddam, N., Boulakia, B. C., and Barth, D. (2020). A
model-free reinforcement learning approach for the
energetic control of a building with non-stationary
user behaviour. 4th International Conference on
Smart Grid and Smart Cities, 2020.
Jennings, J. D., Rubinstein, F. M., DiBartolomeo, D., and
Blanc, S. L. (2000). Comparison of control options
in private offices in an advanced lighting controls
testbed. Journal of Illuminating Engineering Society,
29:39–60.
Kanagasabai, R., , and Sastry, P. S. (1996). Finite time anal-
ysis of the pursuit algorithm for learning automata.
IEEE Transactions on Systems, Man, and Cybernet-
ics, Part B (Cybernetics).
Mardaljevic, J. (2013). Rethinking daylighting and compli-
ance. SLL/CIBSE International Lighting Conference.
2013.
Nagy, Z., Yong, F. Y., Frei, M., and Schlueter, A. (2015).
Occupant centered lighting control for comfort and
energy efficient building operation. Energy and Build-
ings, 94:100–108.
Neida, B. V., Maniccia, D., and Tweed, A. (2001). An anal-
ysis of the energy and cost savings potential of occu-
pancy sensors for commercial lighting systems. Jour-
nal of Illuminating Engineering Society, 30:111–125.
P. Petherbridge, R. H. (1950). Discomfort glare and the
lighting of buildings. Transactions of the Illuminating
Engineering Society.
Park, J. Y., Dougherty, T., Fritz, H., and Nagy, Z. (2019).
LightLearn: An adaptive and occupant centered con-
troller for lighting based on reinforcement learning.
Building and Environment.
Sutton, R. S. and Barto, A. G. (1998). Introduction to Re-
inforcement Learning. MIT Press, Cambridge, MA,
USA, 1st edition.
Thathachar, M. A. L. (1990). Stochastic automata and
learning systems. Sadhana, Vol 15, 1990.
Yang, L., Zolt
´
an, N., Goffin, P., and Schlueter, A. (2015).
Reinforcement learning for optimal control of low ex-
ergy buildings. Applied Energy.
Yazidi, A., Zhang, X., Jiao, L., and Oommen, B. J. (2019).
The hierarchical continuous pursuit learning automa-
tion: a novel scheme for environments with large
numbers of actions. IEEE transactions on neural net-
works and learning systems, 31(2):512–526.
Zhang, T., Baasch, G., Ardakanian, O., and Evins, R.
(2021). On the joint control of multiple building sys-
tems with reinforcement learning. e-Energy ’21: Pro-
ceedings of the Twelfth ACM International Confer-
ence on Future Energy Systems, pages 60–72.
Accelerated Variant of Reinforcement Learning Algorithms for Light Control with Non-stationary User Behaviour
85
