
Addressing the Challenges of Last-mile: The Drone Routing Problem
with Shared Fulfillment Centers
Maria Elena Bruni and Sara Khodaparasti
Department of Mechanical, Energy and Management Engineering, University of Calabria, Rende, Cosenza, Italy
Keywords:
Drone Routing Problem, Drone Energy Consumption, Uncertainty.
Abstract:
With the easing of restrictions worldwide, drones will become a preferred transportation mode for last-mile
deliveries in the coming years. Drones offer, in fact, an optimal solution for many challenges faced with
last-mile delivery as congestion and emissions and can streamline the last leg of the supply chain. Despite
the common conviction that drones will reshape the future of deliveries, numerous hurdles prevent practical
implementation of this futuristic vision, among which the limited drone range and payload. To overcome this
issue, big companies such as Amazon, are already filing up patents for the development of fulfilment centers
where drones can be restocked before flying out again for another delivery, effectively extending their range.
Only a few authors have addressed the joint problem of operating these facilities and providing services to
retail companies. This paper addresses this problem and proposes a mathematical formulation to show the
viability of the proposed approach.
1 INTRODUCTION
The last few years have seen a sharp increase of the
paradigms of on-demand economy and e-commerce.
To catch up with these trends, new last-mile delivery
systems, exploiting the use of drones, have been en-
visioned to reduce delivery times, avoid traffic delays
and potentially cut costs in the long term.
Although drones are used in a number of appli-
cations within logistics and delivery, this ambitious
program has yet to be implemented on a large scale.
The vision of drone-based last-mile solutions, within
a fully automated delivery system, is challenged by
intrinsic characteristic as small payload, limited bat-
tery capacity and regulatory and safety issues of air
control administrations. Despite these unsolved ques-
tions, the idea of using drones for parcel delivery is
gaining ground. We should hence expect that, in a
near future, these types of delivery systems will be
more common for products and services and there
will be greater adoption of this technology. In prepa-
ration for this possible future, Amazon released a
number of patents for different types Fulfillment Cen-
ters (FCs) that would accommodate the landing and
takeoff of drones in dense urban settings. These sta-
tions, networked with a central control and a plurality
of drones, include a number of services from pack-
age handling to recharging/refueling operations. This
raises emerging problems relative to the location of
new, maybe big, FCs closer to customers and the man-
agement of delivery services provided. A possible
promising solution for enhancing the use of drones
in the last-mile, is the adoption of a shared use of FCs
among retail companies providing drone delivery ser-
vices. As a matter of facts, sharing FCs could sensibly
reduce the total number of drones in the sky and the
total operational costs of companies. This paradigm,
dealing with the complexity of the sharing economy,
raises significant challenges to policy and decision-
makers, as well as operational issues to be addressed.
This paper takes a step in this direction, provid-
ing a guide to retail companies for drone routing and
FCs choice, to better control the whole process, offer-
ing practical insights on how to to manage this new
system. The problem is complicated, since it merges
complexity of a combined location-routing problem
with new operational challenges related to the use
of drones, among which energy consumption—which
nonlinearly depends on the payload, battery weight,
and travel time— and uncertainty in flight duration.
The remainder of this paper is organized as follows.
Section 2 provides a detailed review of the relevant
literature. The problem under study is described in
Section 3. In Section 4, computational results are dis-
cussed. Finally, Section 5 presents conclusions and
directions for future research.
362
Bruni, M. and Khodaparasti, S.
Addressing the Challenges of Last-mile: The Drone Routing Problem with Shared Fulfillment Centers.
DOI: 10.5220/0010983100003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 362-367
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 LITERATURE REVIEW
To put the contribution of the present paper in the
right stream, we restrict our attention to routing prob-
lems where drones are used to directly deliver parcels
to customers.
A pure drone delivery problem was addressed in
(Dorling et al., 2016), where two multi-trip vehicle
routing formulations differing only in terms of the ob-
jective function (either total operating cost or total de-
livery time) were proposed. A simulated annealing
algorithm was designed to solve the model heuristi-
cally. A package delivery problem with autonomous
drones considering the battery capacity and its rela-
tion with payload and flight range was considered in
(Choi and Schonfeld, 2017). The objective function
was expressed as the total cost including the cost as-
sociated to the estimated users’ waiting time. In an-
other study, the drone delivery problem was addressed
in a multi-trip context (Troudi et al., 2018), where
the minimization of total travel distance, drone fleet
size, and number of batteries is considered. All the
previous contributions failed to take into account the
nonlinear nature of the energy constraints, hamper-
ing in this way the successful application of drone-
based delivery systems. An important exception is a
recent paper (Cheng et al., 2020), where the multi-trip
drone routing problem is formulated as a two-index
model, and the energy consumption depends nonlin-
early on the payload and linearly on travel distance.
Some valid cuts are presented and a branch-and-cut
algorithm is developed. (Kim et al., 2021) proposed
a drone routing model with multiple depots and mul-
tiple drones, with flight range constraints. The objec-
tive function minimizes the sum of routing and drone
usage costs. Following the location routing context,
in (Kim et al., 2017) the use of drones for a pickup
and delivery problem arising in healthcare is inves-
tigated. The authors proposed a set covering model
to find the optimal number of locations used as de-
pots, followed by a multi-depot drone routing model.
A Lagrangian Relaxation method was also proposed
to solve the model. Another applicative context of
drone location routing is patrol application (Liu et al.,
2019). The model finds the optimal location of sites to
launch the drones and the optimal drone routes mini-
mizing the total cost, including the base establishment
cost, drone usage cost, and the flight cost. (Torabbeigi
et al., 2020) proposed two mathematical formulations
involving strategic and operational plans to optimize
the drone routes for parcel delivery. At the strate-
gic level, a set covering model is solved to determine
the minimum number of depots to open such that all
customers are covered; next, at the operational stage,
a drone routing model is solved in order to find the
minimum number of required drones to dispatch from
the open depots and the corresponding optimal drone
paths. The authors include energy consumption con-
straints into the problem and model them as a linear
functions in terms of payload and travel time.
3 MATHEMATICAL
FORMULATION
We introduce in this section the Drone Routing Prob-
lem with Shared FCs (DRP-ShaFC) as a tailored
location-routing problem, where the operational chal-
lenges related to the use of drones, among which en-
ergy consumption and uncertainty in flight duration,
are taken into account. Our model also includes,
rather originally, a latency objective, i.e. the sum of
arrival times at the customers, which is a compelling
measure for customer-oriented problems, where cus-
tomers’ demand should be met in a timely fashion.
We assume that a set D of distributed FCs are
available to be used to enhance last-mile delivery.
We can consider any type of FCs, truck-based ware-
houses, local re-stocking stations for drones or bee-
hives as well. To offer landing, takeoff, package han-
dling, recharging services, the FC operator requires a
tariff (in the foregoing denoted by T ).
A retail company owning k drones, should bring
items to a set C of customers on the ground. Each
drone makes multiple stops per trip: a single trip
consists of the drone starting at a given FC, where
it would be loaded with the customers’ orders up to
its payload capacity Q, and visiting one or more cus-
tomers. At the end of each flight, the drone is sent
back to one of the FCs, not necessarily the same of
the departure.
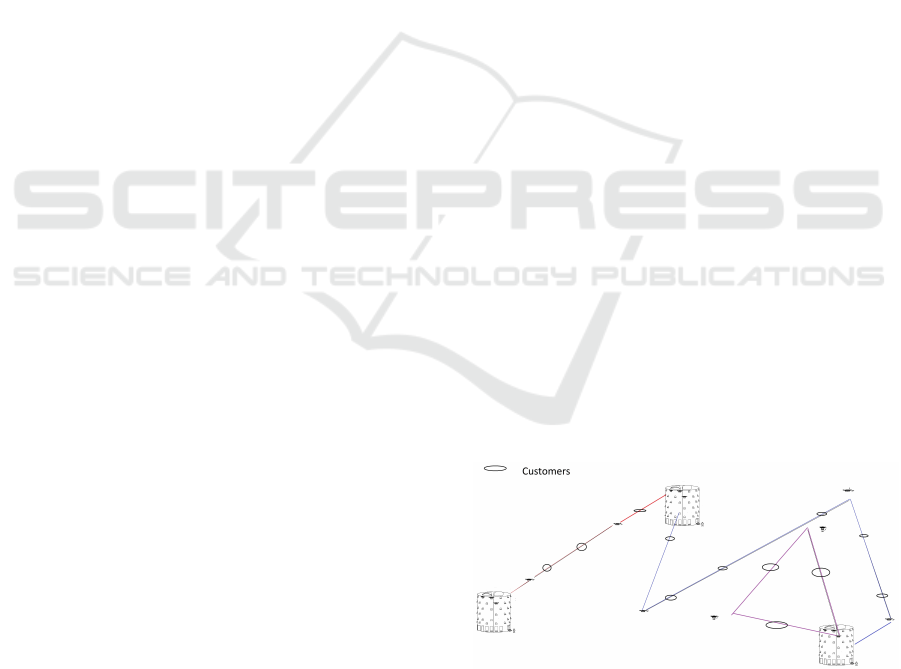
Figure 1: Scheme of the delivery system.
Figure 1 represents the delivery scheme. The
drone energy consumption between the FCs and the
delivery points determines the optimal delivery route
based on the battery capacity. Instead of assum-
ing that drone endurance is limited by a fixed flight
Addressing the Challenges of Last-mile: The Drone Routing Problem with Shared Fulfillment Centers
363
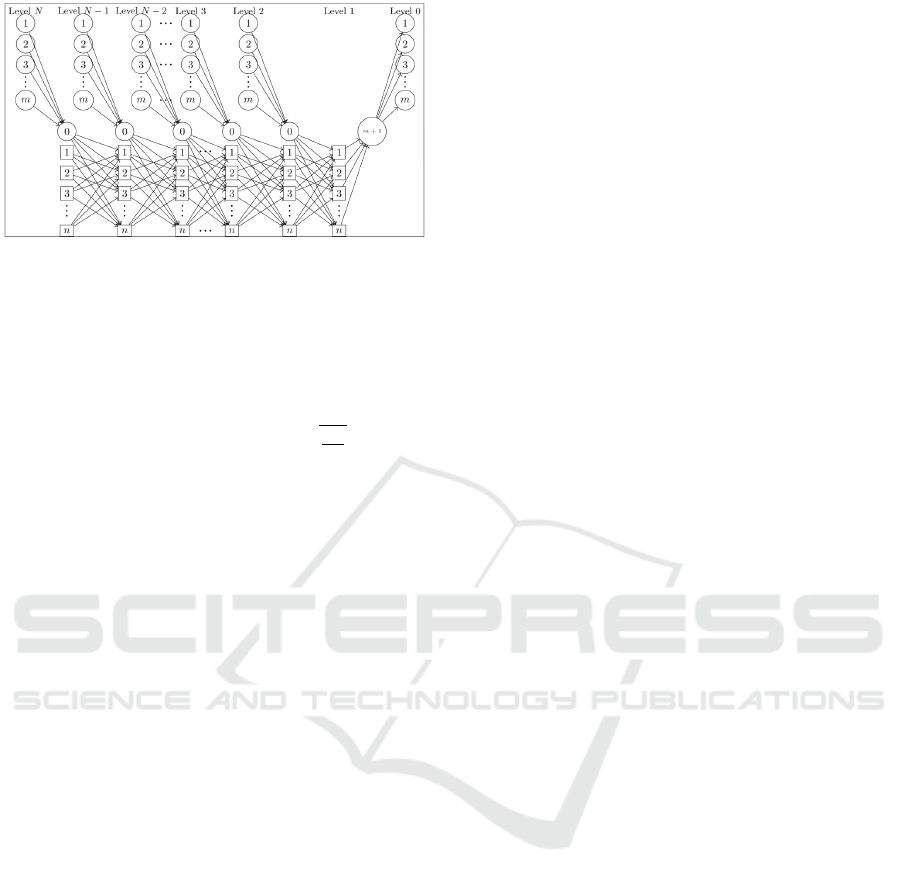
Figure 2: Multi-layer network.
time, we consider energy consumption as a (nonlin-
ear) function of payload, battery weight, and travel
time. In particular, let t
i j
be the travel time between
nodes i and j, W + M = Γ (W is the frame weight
(in kg) and M (kg) is the battery weight). The energy
consumed by the drone, carrying a payload d
i
is ex-
pressed as k(Γ + d
i
)
3/2
t
i j
where k =
q
g
3
ρξh
(here g is
the gravity constant (in N), ρ is the fluid density of air
(in kg/m
3
), ξ is the area of spinning blade disc (in m
2
)
and h is the number of rotors) (Cheng et al., 2020).
The mathematical formulation is essentially de-
veloped based on an extension of the multi-layer net-
work, which has been proved to be superior to other
models, for a wide range of routing problems (for
more information, please see (Nucamendi-Guill
´
en
et al., 2016), (Bruni et al., 2020)).
The multi-layer network is displayed in Figure
2 where the customers and the FCs are depicted by
squares and circles. The auxiliary FCs 0 and m + 1
are added to specify, respectively, the start and the
end of each tour. The network contains N + 1 levels
(positions) where N = |C| − k + 1 is an upper bound
on the number of visited customers in a tour. Let
L = {0,··· , r, · ·· , N} be the set of levels. Levels
N to 2 represent the position of the visited customer
within the tour and include copies of customers, FCs
and the auxiliary FC 0. Instead level 1 corresponds
to the last visited customer within the drone trip and
includes only copies of customers and of the auxil-
iary FC m + 1. For the sake of completeness we also
consider level 0 to specify the FC that retrieves the
drone. A feasible solution in the multi-layer network
is made of k distinct drone trips where each trip starts
from a copy of one of the FCs, that is directly linked
to the auxiliary FC 0, and is followed a subset of cus-
tomers. The last visited customer is the one followed
by the auxiliary FC m +1 that is directly connected to
the Fcs that retrieves the drone. Based on the struc-
ture of the multi-layer network, we define two set of
position dependent binary variables: x
r
i
, i ∈ C which
indicate if customer i is visited in position r (meaning
that is the r
th
-last one), y
r
i j
, r ≥ 1 to show that cus-
tomer j is visited right after node i ∈ D ∪C in posi-
tion r and w
r
i j
, r ≥ 2 which tell if customer j is the
first one to be visited by a drone launched from the
FC i ∈ D and there are r −1 customers to be visited in
the trip. We also extend the definition of variables y
and w to account for the end of each drone trip where
y
0
j(m+1)
, j ∈ C takes 1 if the customer j is the last
stop of the trip drone, and therefore is followed by
the dummy FC m+ 1; also, w
1
ji
, j ∈ C, i ∈ D takes 1 if
after serving the last customer j, the drone is retrieved
at the FC i. Binary variables z
i
indicate if the FC i is
used or not. The total load carried by the drone upon
departure from customer i to reach customer j is de-
noted by u
i j
; if customer j is the first customer after
the drone departure from the FC f , its load is denoted
by v
f j
. The accumulated energy consumption upon
arrival at node i ∈ C ∪ D is denoted by e
i
. Let define
V = D
0
∪C ∪ D, where D
0
= {0, m + 1} is the set of
auxiliary FCs introduced to specify the start and the
end of each drone trip. The total number of FCs used
is limited to N
s
and each FC i ∈ D can host at most
N
i
d
drones. Using the above notation, the model is
formulated as
min
∑
i∈D
∑
j∈C
∑
r∈L
r6=1
rt
i j
w
r
i j
+
∑
i∈C
∑
j∈C
j6=i
∑
r∈L
rt
i j
y
r
i j
+
∑
i∈D
T
i
z
i
(1)
∑
r∈L
x
r
i
= 1 i ∈ C (2)
∑
r∈L
∑
j∈C
y
r
0 j
= k (3)
∑
i∈C
x
1
i
=
∑
r∈L
∑
j∈C
y
r
0 j
(4)
∑
j∈C
j6=i
y
r
i j
= x
r+1
i
i ∈ C,r ∈ L \ {N} (5)
∑
i∈C∪{0}
i6= j
y
r
i j
= x
r
j
j ∈ C, r ∈ L \ {N} (6)
y
N
0 j
= x
N
j
j ∈ C (7)
∑
i∈D
w
r
i j
≥ y
r
0 j
, j ∈ C, r ∈ L \ {1} (8)
z
i
≥ w
r
i j
, i ∈ D, j ∈ C, r ∈ L, \{1} (9)
∑
i∈D
z
i
≤ N
s
(10)
∑
j∈C
∑
r∈L
w
r
i j
≤ N
i
d
i ∈ D (11)
x
1
j
=
∑
i∈D
y
0
j(m+1)
j ∈ C (12)
y
0
j(m+1)
≥
∑
i∈D
w
1
ji
(13)
∑
j∈C
w
1
ji
≤
∑
r∈L\{1}
∑
j∈C
w
r
i j
i ∈ D (14)
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
364

v
i j
≥ d
j
∑
r∈L\{1}
w
r
i j
, i ∈ D, j ∈ C (15)
v
i j
≤ Q
∑
r∈L\{1}
w
r
i j
, i ∈ D, j ∈ C (16)
u
i j
≥ d
j
∑
r∈L
y
r
i j
, i, j ∈ C, i 6= j (17)
u
i j
≤ (Q − d
i
)
∑
r∈L\{N}
y
r
i j
, i, j ∈ C, i 6= j (18)
∑
h∈D
v
hi
+
∑
j∈C
j6=i
u
ji
−
∑
j∈C
j6=i
u
i j
= d
i
, i ∈ C (19)
e
i
+ k(Γ + u
i j
)
3/2
t
i j
≤ e
j
+ M
0
i j
(1 −
∑
r∈
L\{N}
y
r
i j
) i, j ∈ C, i 6= j
(20)
e
i
+ k(Γ + v
i j
)
3/2
t
i j
≤ e
j
+ M
00
i j
(1 −
∑
r∈
L\{1}
w
r
i j
) i ∈ D, j ∈ C
(21)
e
j
+ k Γ
3/2
∑
i∈D
t
ji
w
1
ji
≤ B j ∈ C,i ∈ D (22)
e
i
= 0 i ∈ D (23)
z
i
∈ {0,1} i ∈ D (24)
x
r
i
∈ {0,1} i ∈ C, r ∈ L (25)
y
r
0 j
∈ {0,1} j ∈ C, r ∈ L (26)
y
0
j(m+1)
∈ {0,1} j ∈ C (27)
y
r
i j
∈ {0,1} i, j ∈ C, i 6= j, r ∈ L, r 6= N (28)
w
r
i j
∈ {0,1} i ∈ D, j ∈ C, r ∈ L \ {1} (29)
w
1
i j
∈ {0,1} i ∈ C, j ∈ D (30)
u
i j
≥ 0 i, j ∈ C, i 6= j (31)
e
i
≥ 0 i ∈ D (32)
where M
0
i j
and M
00
i j
are the ”big-M” parameters.
The objective function (1) minimizes the total
waiting times of the customers plus the cost associ-
ated to the use of the FCs. Constraints (2) ensure that
each customer is visited exactly once. Constraint (3)
ensures the use of exactly k drones. Constraint (4), (5)
and (6) guarantee the continuity of each tour. Con-
straints (7) force nodes to be connected to node 0 at
level N. Constraints (8) and (9) allow starting a drone
route only from used facilities. Constraint in (10) and
(11) represent the restriction on the maximum number
of facilities used and the number of drones that each
facility can handle. Constraints (12)-(13) define the
relation between the last customer visited and the des-
tination facility. Constraints (14) determine the return
of drones to facilities. Constraints (15)–(19) are used
to limit the drone payload (Nucamendi-Guill
´
en et al.,
2018). Constraints (20)–(23) represent the drone en-
ergy consumption. Finally, Constraints (24)–(32) es-
tablish the nature of the variables.
As known, weather conditions, wind direction and
aerial congestion can influence the travel time of the
drone and hence, the energy consumption. In this
paper, we consider drone travel time as an uncer-
tain parameter belonging to a box uncertainty U
∞
=
{ξ|||ξ||
∞
≤ Ψ}, where here Ψ is a parameter control-
ling the size of the uncertainty set.
Following the robust paradigm in (Ben-Tal et al.,
2015), the robust counterpart of the proposed model
can be derived as follows.
min
∑
r∈L
r6=1
r (
¯
t
i j
+ Ψ
ˆ
t
i j
)w
r
i j
+
∑
i∈C
∑
j∈C
j6=i
∑
r∈L
r (
¯
t
i j
+ Ψ
ˆ
t
i j
)y
r
i j
+
∑
i∈D
T
i
z
i
e
i
+ k(Γ +u
i j
)
3/2
(
¯
t
i j
+ Ψ
ˆ
t
i j
) ≤ e
j
+ M
0
i j
(1 −
∑
r∈L\{N}
y
r
i j
)
i, j ∈ C, i 6= j
e
i
+ k(Γ +v
i j
)
3/2
(
¯
t
i j
+ Ψ
ˆ
t
i j
) ≤ e
j
+ M
00
i j
(1 −
∑
r∈L\{1}
w
r
i j
)
i ∈ D, j ∈ C
e
j
+ k Γ
3/2
∑
i∈D
(
¯
t
ji
+ Ψ
ˆ
t
ji
)w
1
ji
≤ B j ∈ C,i ∈ D
(2)-(19),(23)-(32)
(33)
(34)
(35)
(36)
where the uncertain parameter t
i j
falls within the sym-
metric box [
¯
t
i j
− Ψ
ˆ
t
i j
2
,
¯
t
i j
+ Ψ
ˆ
t
i j
2
].
4 COMPUTATIONAL
EXPERIMENTS
In this section, we conduct some experiments to show
the validity of the proposed formulation.
All the experiments were executed on an Intel
Core i7-10750H, with 2.60 GHz CPU and 16 GB
RAM working under Windows 10 with the algebraic
modeling language AIMMS 4.79.2.5. Since model
(1)–(32) is a nonlinear MIP model with box uncer-
tainty set, we solved it using the outer approximation
algorithm with a time limit of 500 seconds. The Outer
approximation algorithm is considered as the state-of-
the-art approach for solving MINLP models. The al-
gorithm follows a basic decomposition approach and
solves an alternating sequence of nonlinear subprob-
lems and relaxed MIP master problems that provide,
respectively, upper and lower bounds. If the origi-
nal MINLP model is convex, the algorithm guaran-
tees to find the global optimal solution (Duran and
Grossmann, 1986). We used the A1 and A2 instances
presented in (Cheng et al., 2020). The demand distri-
bution varied between values from [0.1, 0.7] kg for the
first 40% of customers and from [0.1, 1.5] kg for the
remaining customers. Two configurations (Centeres
and Marginal) were selected for the FCs locations,
either in the center of the customers area or in the
outskirts. In the problem analysis, values of 2,3,5,6
were chosen as the maximum number of drones per
Addressing the Challenges of Last-mile: The Drone Routing Problem with Shared Fulfillment Centers
365
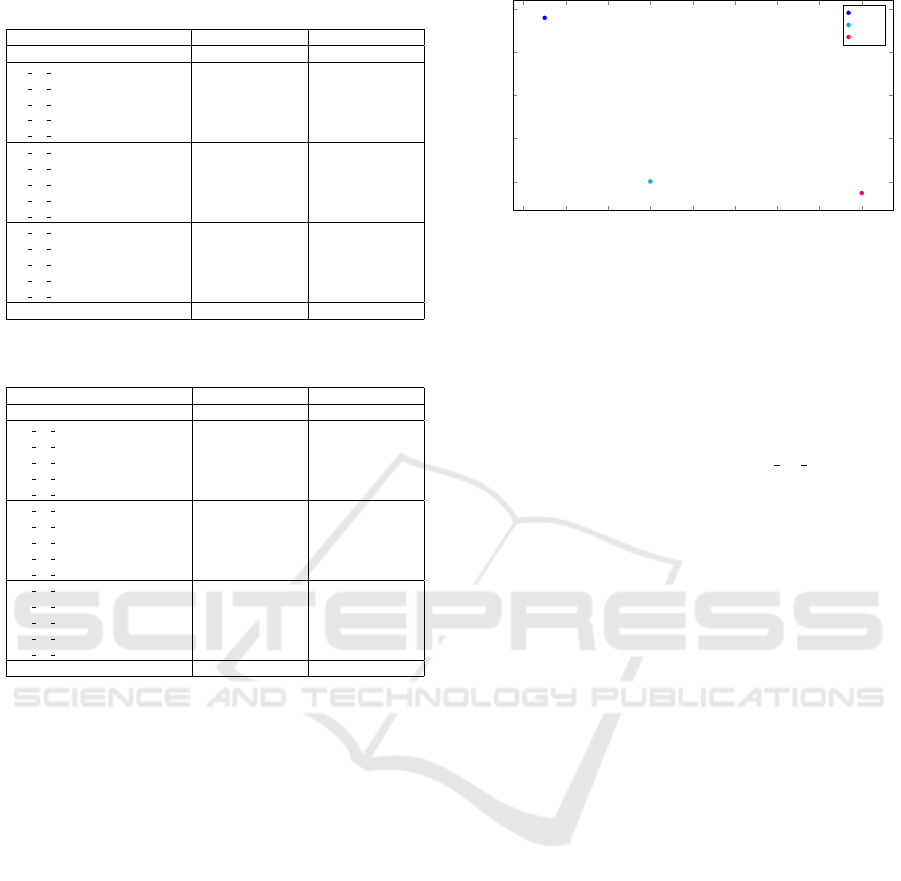
Table 1: Results for Set A1 instances.
Centered Marginal
Instance |C| |D| k N
d
Obj CPU (s) Obj CPU (s)
A 10 1 10 5 2 2 7.016 7.09 6.635 2.85
A 10 2 6.796 2.02 6.557 2.68
A 10 3 6.838 4.11 NFS 500
A 10 4 6.568 2.77 N.A. N.A.
A 10 5 6.956 2.75 NFS 500
A 15 1 15 5 3 2 12.09 33.38 12.05 35.1
A 15 2 12.524 48.49 12.252 30.17
A 15 3 11.999 37.94 12.127 32.12
A 15 4 12.241 42.86 12.346 41.78
A 15 5 12.327 47.55 11.873 51.74
A 20 1 20 5 4 3 12.602 336.83 12.591 305.37
A 20 2 12.667 442.88 12.559 440.93
A 20 3 12.68 496.25 12.684 425.31
A 20 4 - 500 - 500
A 20 5 - 500 - 500
Avg 166.99 257.87
Table 2: Results for Set A2 instances.
Centered Marginal
Instance |C| |D| k N
d
Obj CPU (s) Obj CPU (s)
A2 10 1 10 5 2 2 6.901 2.51 6.759 2.16
A2 10 2 6.712 2.68 - 500
A2 10 3 6.787 2.05 - 500
A2 10 4 6.808 2.13 N.A. N.A.
A2 10 5 6.795 2.57 - 500
A2 15 1 15 5 3 2 12.11 37.94 12.165 30.95
A2 15 2 12.035 34.72 12.032 30.43
A2 15 3 11.934 22.27 11.795 26.58
A2 15 4 12.313 47.91 12.247 41.05
A2 15 5 12.108 20.58 12.342 20.6
A2 20 1 20 5 4 3 12.312 302.21 12.791 273.28
A2 20 2 12.625 452.68 12.163 434.08
A2 20 3 12.425 451.64 12.561 403.01
A2 20 4 - 500 - 500
A2 20 5 - 500 - 500
Avg 158.79 284.14
FC. The tariff for using a FC has been set according
to (Aurambout et al., 2019) as the potential average
cost across the whole industry, inclusive economies
of scales multiplied by the average number of cus-
tomers serviced. We remark that in the considered
experiments the FC tariff has been considered inde-
pendent from the specific location. In fact, given the
limited drone range, the more the FCs are close to the
customers, the higher will be the number of compa-
nies willing to use the service. Even though the FC
building cost is higher as we approach the city center,
it is also true that the massive use of the service by
commercial companies could lower the tariffs, given
that the FC economic return is higher. Hence, consid-
ering the same tariff for both configurations is, in our
opinion, reasonable.
Finally, we considered a homogeneous fleet of 2,
3, 4, 7 or 8 Alta 8 drones with the following char-
acteristics: W = 6.2 (kg), M = 2.8 (kg), h = 8, ρ =
1.204(kq/m
3
),ξ = 0.1256(m
2
), B = 0.355 (kWh).
Tables 1 and 2 present the characteristic of the in-
stances considered, the objective function value (Obj)
and the solution time in seconds (CPU) for set A1 and
A2. As a general observation, we note that the com-
4
6
8 10 12 14
16
18 20
2.7
2.8
2.9
3
3.1
D1(4)
D2(2),D5(2)
D2,D3,D4,D5
Cost for using the FCs
Total latency
N
d
= 4
N
d
= 2
N
d
= 1
Figure 3: Trade-off between latency and cost.
putational time is quite limited, especially consider-
ing that this problem is a tactical operational problem.
For some instances, however, it was not possible to
find a solution within 500 seconds (a dash is reported
in the Tables). The position of the FCs does not seem
to influence a lot the total latency since on average the
percentage difference is quite low and below 5%. We
notice, however that one instance (A1 10 4) becomes
infeasible when the FCs are marginally placed in the
customer’s area.
Figure 3 shows the impact of the number of drones
that each FCs can dispatch. As it is evident, to quickly
satisfy the delivery demand it is beneficial for the de-
livery company to use more FCs. We observe that the
total latency could decrease from around 3 hours to
2.6 hours. However, the cost for using the FCs can
considerably increase.
5 CONCLUSIONS
In this paper, we addressed a new emerging prob-
lem in last-mile logistics, namely the joint manage-
ment of FCs and autonomous vehicles. The process is
modeled as a variant of the location routing problem,
called DRP-ShaFC. The main characteristics of this
new problem are the drones intrinsic properties, as
a limited battery capacity, payload, and the weather-
related uncertainties that lead to uncertain flight dura-
tion. Moreover, business oriented objectives, as cus-
tomer satisfaction (through the latency) and the cost
of using distributed FCs are also taken into account.
The model introduced can be solved to optimality for
instances with limited size. For larger instances, effi-
cient solution methods should be proposed and tested.
This aspect becomes crucial in view of possible ex-
tensions where the optimization of the FC tariffs is
embedded into the model. This might be done by a
combinatorial bi-level programming approach able to
model the hierarchical decision-making process.
An interesting avenue for future research is the in-
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
366

corporation of green criteria, to assess the environ-
mental impact of this paradigm compared to tradi-
tional non shared systems. In this respect, we hope
that this paper will foster new researches to soon open
the way of a large-scale implementation of this shared
delivery system, where different FCs jointly provide
services to drone delivery companies. This, in turn,
could better satisfy the booming customers demand
for on-time and fast delivery services.
REFERENCES
Aurambout, J.-P., Gkoumas, K., and Ciuffo, B. (2019). Last
mile delivery by drones: an estimation of viable mar-
ket potential and access to citizens across european
cities. European Transport Research Review, 11(1):1–
21.
Ben-Tal, A., Den Hertog, D., and Vial, J.-P. (2015). Deriv-
ing robust counterparts of nonlinear uncertain inequal-
ities. Mathematical programming, 149(1):265–299.
Bruni, M. E., Khodaparasti, S., and Demeulemeester,
E. (2020). The distributionally robust machine
scheduling problem with job selection and sequence-
dependent setup times. Computers & Operations Re-
search, 123:105017.
Cheng, C., Adulyasak, Y., and Rousseau, L.-M. (2020).
Drone routing with energy function: Formulation and
exact algorithm. Transportation Research Part B:
Methodological, 139:364–387.
Choi, Y. and Schonfeld, P. M. (2017). Optimization of
multi-package drone deliveries considering battery ca-
pacity. In Proceedings of the 96th Annual Meeting of
the Transportation Research Board, Washington, DC,
USA, pages 8–12.
Dorling, K., Heinrichs, J., Messier, G. G., and
Magierowski, S. (2016). Vehicle routing problems for
drone delivery. IEEE Transactions on Systems, Man,
and Cybernetics: Systems, 47(1):70–85.
Duran, M. A. and Grossmann, I. E. (1986). An outer-
approximation algorithm for a class of mixed-integer
nonlinear programs. Mathematical programming,
36(3):307–339.
Kim, S., Kwak, J. H., Oh, B., Lee, D.-H., and Lee, D.
(2021). An optimal routing algorithm for unmanned
aerial vehicles. Sensors, 21(4):1219.
Kim, S. J., Lim, G. J., Cho, J., and C
ˆ
ot
´
e, M. J. (2017).
Drone-aided healthcare services for patients with
chronic diseases in rural areas. Journal of Intelligent
& Robotic Systems, 88(1):163–180.
Liu, Y., Liu, Z., Shi, J., Wu, G., and Chen, C. (2019). Op-
timization of base location and patrol routes for un-
manned aerial vehicles in border intelligence, surveil-
lance, and reconnaissance. Journal of Advanced
Transportation, 2019.
Nucamendi-Guill
´
en, S., Angel-Bello, F., Mart
´
ınez-Salazar,
I., and Cordero-Franco, A. E. (2018). The cumula-
tive capacitated vehicle routing problem: New formu-
lations and iterated greedy algorithms. Expert Systems
with Applications, 113:315–327.
Nucamendi-Guill
´
en, S., Mart
´
ınez-Salazar, I., Angel-Bello,
F., and Moreno-Vega, J. M. (2016). A mixed integer
formulation and an efficient metaheuristic procedure
for the k-travelling repairmen problem. Journal of the
Operational Research Society, 67(8):1121–1134.
Torabbeigi, M., Lim, G. J., and Kim, S. J. (2020). Drone de-
livery scheduling optimization considering payload-
induced battery consumption rates. Journal of Intelli-
gent & Robotic Systems, 97(3):471–487.
Troudi, A., Addouche, S.-A., Dellagi, S., and Mhamedi,
A. E. (2018). Sizing of the drone delivery fleet con-
sidering energy autonomy. Sustainability, 10(9):3344.
Addressing the Challenges of Last-mile: The Drone Routing Problem with Shared Fulfillment Centers
367
