
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset
Monika Schak and Alexander Gepperth
Fulda University of Applied Sciences, 36037 Fulda, Germany
Keywords:
Hand Gestures, Dataset, Multimodal Data, Data Fusion, Sequence Detection.
Abstract:
We present a new large-scale multi-modal dataset for free-hand gesture recognition. The freely available
dataset consists of 79,881 sequences, grouped into six classes representing typical hand gestures in human-
machine interaction. Each sample contains four independent modalities (arriving at different frequencies)
recorded from two independent sensors: a fixed 3D camera for video, audio and 3D, and a wearable accelera-
tion sensor attached to the wrist. The gesture classes are specifically chosen with investigations on multi-modal
fusion in mind. For example, two gesture classes can be distinguished mainly by audio, while the four others
are not exhibiting audio signals – besides white noise. An important point concerning this dataset is that it is
recorded from a single person. While this reduces variability somewhat, it virtually eliminates the risk of in-
correctly performed gestures, thus enhancing the quality of the data. By implementing a simple LSTM-based
gesture classifier in a live system, we can demonstrate that generalization to other persons is nevertheless high.
In addition, we show the validity and internal consistency of the data by training LSTM and DNN classifiers
relying on a single modality to high precision.
1 INTRODUCTION
This work is in the context of multi-modal hand
gesture recognition. That is a field of machine
learning that has profound application relevance in,
e.g., human-machine-interaction (HMI). Since mod-
ern deep learning methods are powerful but require
a large amount of data to reach their peak perfor-
mance, successful hand gesture recognition requires
sufficiently large and reliable datasets. Furthermore,
datasets should reflect the following: Present-day sen-
sors are increasingly cheap and universally available
and gesture recognition can profit hugely when in-
cluding information from several sensory sources (or
modalities).
Training data for hand gesture recognition may
be characterized by the number of distinct modali-
ties, the number of included gesture classes, and the
available gesture samples per class. Another impor-
tant characteristic is sample diversity: this can be
promoted by, e.g., choosing different illumination or
background conditions. Sample diversity can be fur-
ther enhanced by choosing a large number of different
persons performing the gestures.
In the Multi-Modal Hand Gesture Dataset
(MMHG) described here, we chose to create a large-
scale dataset with relatively few classes but a large
number of samples per class. We include audio, RGB,
depth, and IMD sensing as modalities into all ges-
ture samples. For diversity, we make a rather unusual
choice: all gestures are performed by a single person.
This will certainly reduce diversity, although the ad-
vantages are significant as well: a single person will
be well instructed in performing the gestures, so there
are few corrupted or incorrectly performed samples
in the data. This would certainly be the case if a large
number of persons were to perform the gestures, with
little time for each person to learn the correct way of
performing them. Furthermore, this is a typical ap-
plication setting, where, e.g., an infotainment system
in a modern vehicle, is mainly interacting with, and
adapted to, a single user. In this context, additional
performance boosts can be obtained by specializing
to that user. We therefore model an ”educated” user
here, one that is acquainted with the gesture recogni-
tion system being used. We show that it is possible to
train a system with our dataset and still obtain good
results when classifying hand gestures performed by
different users.
2 RELATED WORK
Numerous gesture datasets have been proposed in re-
cent years: The SHGD dataset (Kopuklu et al., 2019)
contains only depth data recorded by an RGB-D cam-
122
Schak, M. and Gepperth, A.
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset.
DOI: 10.5220/0010982200003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 122-131
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Table 1: Overview of already available hand-gesture datasets and the MMHG dataset presented in this article.
Dataset Classes Samples/ Class Persons Total Samples Modalities
SHGD (Kopuklu et al.,
2019)
15 96 27 4,500 Depth
Cambridge Dataset
(Kim and Cipolla,
2008)
10 100 2 1,000 RGB
n.A. (Marin et al.,
2016)
10 100 14 1,400 Depth, Motion
IsoGD (Wan et al.,
2016)
249 190 21 50,000 RGB, Depth
EgoGesture (Zhang
et al., 2018)
83 300 50 24,000 RGB, Depth
SKIG (Liu and Shao,
2013)
10 360 6 1,080 RGB, Depth
ChaLearn (Escalera
et al., 2013)
20 390 27 13,900 Audio, RGB, Depth
n.A. (Memo et al.,
2015)
11 3,000 - 35,200 rendered Depth
MMHG (this paper) 6 ≈ 13,300 1 79,881 RGB, Depth, Motion,
Audio
era. It consists of 15 gesture classes with 96 sequence
samples per class, recorded from 27 persons. The to-
tal dataset size is about 4,500 gesture samples. (Marin
et al., 2016) present a multi-modal dataset containing
depth data from an RGB-D and LeapMotion sensor. It
consists of ten gesture classes with 100 gesture sam-
ples per class recorded from 14 persons. In total, this
amounts to a dataset size of 1,400 gesture samples.
An interesting approach is pursued in (Memo et al.,
2015): instead of recording gesture samples, the au-
thors propose to render them using an advanced com-
puter graphics pipeline. The resulting dataset con-
tains depth data grouped into eleven gesture classes,
with about 3,000 gesture samples per class. In to-
tal, the dataset contains 35,200 gesture samples. The
Cambridge dataset (Kim and Cipolla, 2008) contains
1,000 RGB samples grouped in ten gesture classes,
with 100 gesture samples per class recorded from two
persons. The Sheffield Kinect Gesture Dataset (Liu
and Shao, 2013) contains 1,080 RGB-D sequences,
grouped into ten classes, with 360 gesture samples per
class recorded from six subjects.
The first really large-scale dataset on hand gesture
recognition to be published was the ChaLearn-2013
dataset (Escalera et al., 2013). It contains roughly
14,000 gesture samples grouped into 20 classes with
an average of 360 gesture samples per class and
recorded from 27 persons. Included modalities are
audio, RGB and depth. An even larger dataset, the
IsoGD dataset, was published in (Wan et al., 2016),
although it just includes RGB and depth modalities.
This dataset contains about 50,000 gesture samples,
grouped into 249 gesture classes, with an average of
190 gesture samples per class and recorded from 21
persons. A dataset of similar size that includes RGB
and depth was presented in (Zhang et al., 2018). Here,
24,000 gesture samples were recorded from 50 per-
sons and grouped into 83 classes with roughly 300
gesture samples per class. A particularity of this
dataset is that it is egocentric and recorded from a
head-mounted camera.
To summarize, we find that there are no publicly
available datasets that, on one hand, include a large
number of gesture samples (> 10,000), and which,
on the other hand, contain a reasonable number of
modalities recorded from independent sensors. We
aim to close this gap with the dataset we are describ-
ing here. An overview of the mentioned datasets is
given in Table 1.
An interesting point to make here is that all
datasets we know aim to capture gestures from differ-
ent people to include as much diversity as possible.
As stated before, our approach is different: we only
record from a single person, which results in a less
diverse but more reliable dataset that closely reflects
applications of gesture recognition in, e.g., HMI.
For completeness: There exists a large number
of multi-modal datasets for human activity recogni-
tion (Ranasinghe et al., 2016; Romdhane et al., 2013;
Chen et al., 2015; D. Lara and Labrador, 2013; Ni
et al., 2011; Zhang and Sawchuk, 2012; Radu et al.,
2018; Sharma et al., 2016), a related but less well-
defined field. The main feature of these datasets is
data from wearable sensors (which play a role in our
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset
123

dataset as well), as well as the inclusion of multiple
RGB and RGB-D sensors.
2.1 Contribution
The main contribution of this article is the presen-
tation of a new, large-scale dataset for hand gesture
recognition consisting of four modalities. It offers a
large number of samples per class. Each class is de-
signed carefully to show the benefits of multi-modal
fusion. In addition, we offer carefully curated data
coming from a single person that is well-instructed.
Thus, we are ensuring a consistently high quality of
data for machine learning.
In addition, we present experiments showing the
consistency of the dataset by achieving very plausible
classification performances on each of the modalities,
taken individually. Lastly, we describe a real-time im-
plementation of the 3D-based gesture classifier and
demonstrate excellent generalization to other persons.
This last point is very important, since it shows that
the relative lack of diversity in our dataset is not an
obstacle to generalization.
3 DATASET
The dataset contains recordings of six different hand
gestures. There are around 13,300 recordings of each
gesture class, totaling 79,881 samples. All gestures
are performed by a single person as explained above.
This approach ensures that the conducted gestures
are performed correctly and consistently across the
dataset, and also that the variability of each gesture
class is not excessive. Each gesture sample, irrespec-
tively of its class, lasts for two seconds. The hand
gestures are observed by the following four modali-
ties: a wearable IMD sensor, an RGB sensor, a 3D
sensor, and a microphone.
Table 2 shows information about the provided
data before and after preprocessing. Both the
raw and preprocessed data can be downloaded at
data.informatik.hs-fulda.de.
3.1 Setup
We used a fixed setup for all recordings to ensure each
gesture is recorded with the same distance to the cam-
era. For that, we bolted the camera to a board and
marked the area in which to conduct the gesture. This
setup is shown in Figure 1.
In every recording, each gesture class is repeated
ten times before moving on to the next class. There-
fore, each recording produces ten samples for each
Figure 1: The fixed setup to record hand gestures for our
multi-modal gesture dataset.
of the six classes or a total of sixty samples. During
the time of recording, the samples are immediately
assigned class labels. For each recording, we save
the RGB images as PNG files, the 3D point clouds as
PCD files, audio as MP3 files, the acceleration data
and labels as NumPy arrays. In a separate step, in-
dependently of the recording, we preprocess the data
into a format that can be used as training and test in-
put. The recorded data and the preprocessing step are
described in Sections 3.3 to 3.6.
3.2 Gesture Classes
Our dataset consists of six classes: two are rather sta-
tionary, two are rather dynamic and two rely on sound
to be distinguished from each other.
• Thumbs Up (0): The first class is a thumbs-up
gesture. It is a stationary gesture with very little
movement.
• Thumbs Down (1): The second class is a thumbs
down gesture. It is also a stationary gesture with
very little movement.
• Swipe Left (2): The third class is a dynamic ges-
ture. For this, the whole hand swipes from right
to left.
• Swipe Right (3): The fourth class is also a dy-
namic gesture. In contrast to the third class, the
whole hand swipes from left to right.
• One Snap (4): The fifth class is a rather station-
ary hand gesture as well. The thumb and middle
finger make a snapping sound, therefore sound is
important for this gesture.
• Two Snaps (5): The sixth class is comparable
to the fifth class, with the difference of snapping
twice instead of once. Therefore, sound is also
important for this gesture.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
124
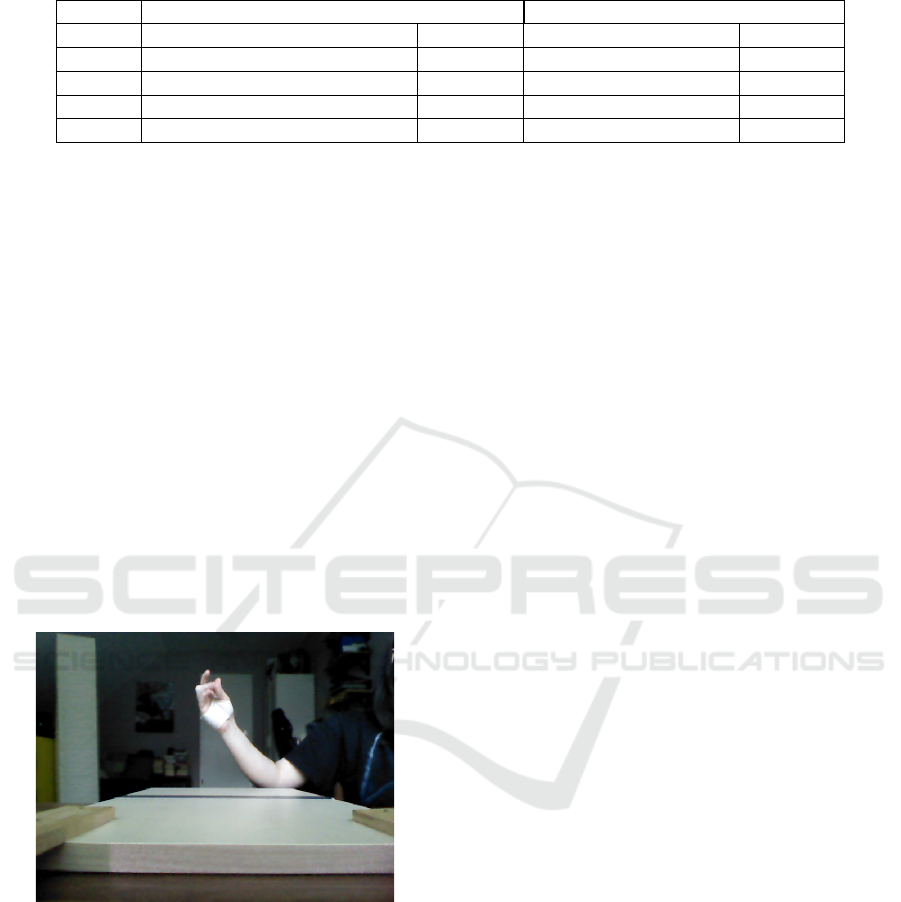
Table 2: Information about the provided data in our new multi-modal hand gesture dataset before and after preprocessing.
Before preprocessing After preprocessing
Modal. Format Size Format Size
RGB PNG, 640 × 480 pixel, 12/gest. 546.0 GB Numpy, (N, 12, 756) 39.8 GB
3D PCD, 12/gesture 372.6 GB Numpy, (N, 8, 625) 2.0 GB
Audio MP3, 16 kHz, 1/gesture 1.8 GB Numpy, (N, 182, 181, 1) 21.2 GB
IMD Numpy, (N, 20, 7), 10/gesture 124.0 MB Numpy, (N, 10, 3, 6) 114.9 MB
3.3 RGB Data
To record RGB data, we use the video stream
provided by an Orbbec Astra 3D sensor. It sends a
stream of 800 × 600 RGB images which we record.
Preprocessed as follows: after cropping the images to
the part in which the hand is visible, we scale them to
72 ×48 pixels. Afterward, we calculate the histogram
of oriented gradients (HOG) descriptor (McConnell,
1986; William T. Freeman, 1994) for each image,
using the OpenCV implementation. We use the
default parameters except for cell size which is set
to be 8 × 8 pixels, and block size which is 16 × 16
pixels, resulting in a descriptor of 756 entries. We set
the frame rate such as to receive twelve images per
gesture. Thus, a gesture is characterized by twelve
HOG descriptors, each having a fixed size of 756
values. The preprocessing results in a NumPy array
for the RGB data with a shape of (N, 12, 756).
Figure 2: Example of one frame for an RGB sample of class
5 (One Snap).
Figure 2 shows one of the recorded RGB images
for class 5 (One Snap). The setup – as in position
and distance to the camera – is always the same, the
background as well as the lighting might vary.
3.4 3D Data
To record 3D data, we use the stream of depth images
provided by an Orbbec Astra 3D sensor. The depth
images have a size of 640 × 480 and are converted
to point clouds, then stored. During the two-second
window for each gesture, we receive a total of twelve
point clouds. Each of these point clouds is passed
through the five steps of processing:
• Downsampling: At first, we reduce the size of
the point clouds to lower the computational costs.
Therefore, we create a 3D-voxel grid over the in-
put point cloud data. For every voxel, we calculate
the centroid of all its points and use this to repre-
sent the voxel.
• VoI Filtering: In the second step, we use condi-
tional removal to crop the point cloud to a defined
volume of interest. Thus, removing background
data and leaving just the area in which the hand is
present.
• Removing NaN: Afterwards, we remove measure-
ment errors by deleting all points whose x-, y-, or
z-value is equal to NaN.
• Computing Normals: In the fourth step, we use
approximations to infer the surface normals for all
remainng points in the point cloud.
• Creating a Point Feature Histogram (PFH): To
get a descriptor of fixed length, regardless of the
size of the point clouds, that can be fed to a ma-
chine learning model, we decided on a representa-
tion with PFH (Sachara et al., 2017; Sarkar et al.,
2017). These descriptors characterize the phe-
nomenology of hand, palm, and fingers in a pre-
cise manner while remaining computationally fea-
sible at the same time. PFH is based on the surface
normals computed in the previous step. Now, we
repeatedly select two points and compute their de-
scriptor (Rusu et al., 2008), which provides four
values based on the length and relative orienta-
tion of the surface normals. Each of the four val-
ues is subdivided into five intervals, giving a to-
tal of 625 discrete possibilities. The result is a
625-dimensional histogram for each point cloud.
Lastly, we normalize the histogram.
We receive eight frames for every gesture. Each frame
consists of 625 values. Figure 3 shows the point fea-
ture histogram of one frame of one gesture (bottom)
and the corresponding point cloud (top). The result-
ing NumPy array after preprocessing has a shape of
(N, 12, 625).
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset
125
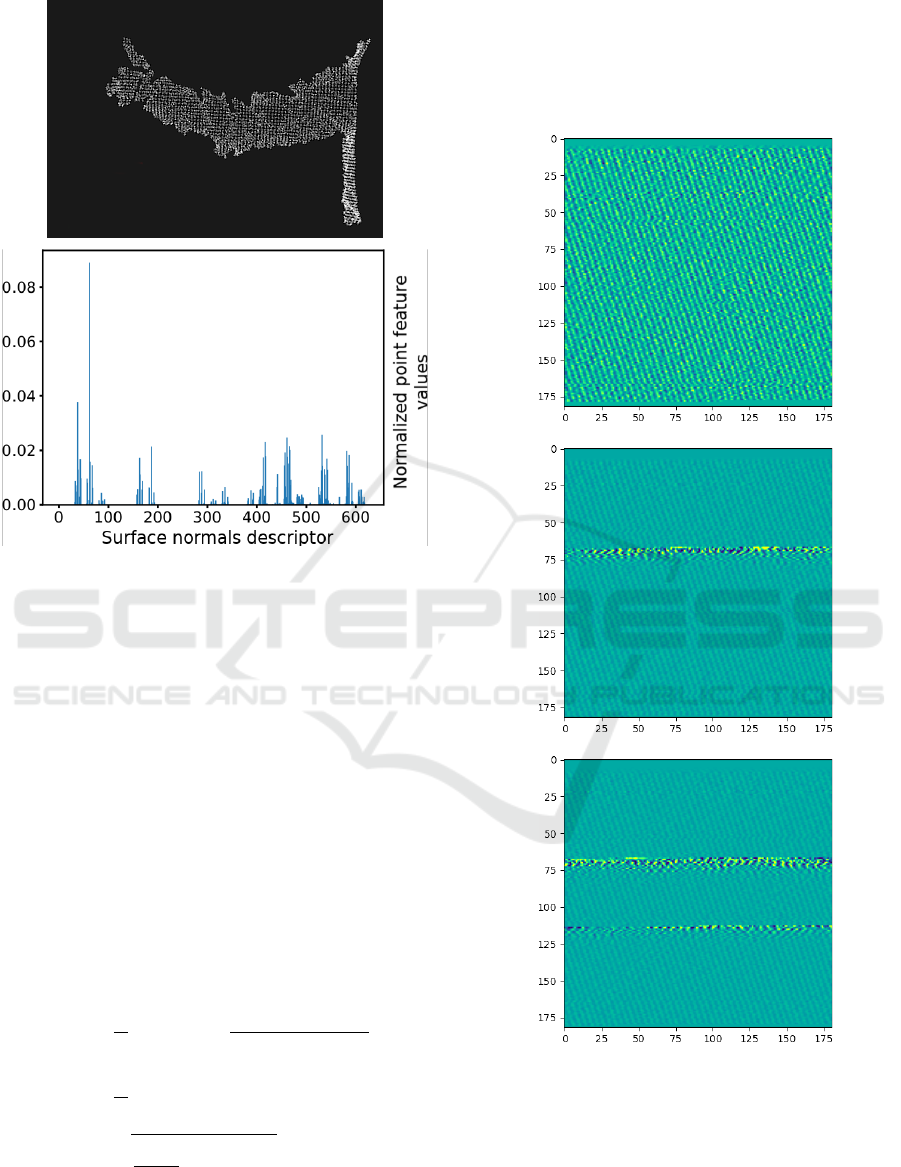
Figure 3: Example of a point feature histogram (bottom)
corresponding to one frame of a ”Thumbs Up” gesture (top:
point cloud from which the histogram was computed).
3.5 IMD Data
To record the acceleration data, we use a 9-axis accel-
eration sensor (BWT901CL von Bitmotion) attached
to the wrist of the user’s hand. It can record 3-
axis acceleration data and 3-axis yaw rates as well
as gyroscopic and magnetic field measurements at a
frequency of 200 Hz. We store a 7-tuple for each
of the 400 measurements containing the timestamp,
the acceleration data and the yaw rates. Prepro-
cessing cleans the rather noisy signals: for this, we
gather all N = 20 7-tuples from each consecutive 200-
millisecond window into a block and calculate statis-
tical values for each entry except the timestamp, as
shown in equations 1-3.
¯x =
1
N
N
∑
i=1
x
i
!
=
x
1
+ x
2
+ ·· · + x
N
N
(1)
Var(x) =
1
N
N
∑
i=1
(x
i
− ¯x)
2
(2)
S(x) =
s
1
N − 1
N
∑
i=1
(x
i
− ¯x)
2
(3)
Thus, we receive ten descriptors (200ms ·10 frames =
2s) for every gesture sample. Each descriptor consists
of 18 values: three statistical values for each of the
six axes. This results in a NumPy array for the pre-
processed IMD data with the shape of (N, 10, 3, 6).
3.6 Audio Data
Figure 4: Examples of plotted STFT data. Sample without
sound (top, class 2 - swipe left), with one snapping sound
(middle, class 4 - snap once) and with two snapping sounds
(bottom, class 5 - snap twice). STFT provides the frequency
information and displays how much the frequency varies
during a time frame.
To record the audio data, we use the audio stream pro-
vided by the Orbbec Astra 3D sensor. The sensor al-
lows to record audio between 20 and 16,000 Hz and
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
126
has a sensitivity of 30 dB.
For the entire length of the recording, we save the
wave data and later down-sample it to a frequency of
8,000 Hz. To ensure each sample has the same length,
we use zero-padding and randomly pick the offset for
each sample.
Afterward, we compute the Short-Time Fourier
Transform (Nasser, 2008) (STFT) for each data sam-
ple. Over a window of 455 data points with an overlap
of 420 points, the STFT provides the frequency infor-
mation and displays how much the frequency varies
during that time frame. The result of this computa-
tion is 2D data in the shape of 181× 182. The prepro-
cessing step is based on data conversion conducted on
the AudioMNIST dataset (Becker et al., 2018) and re-
sults in a NumPy array for the audio data with shape
(N, 182, 181, 1).
Figure 4 shows three examples of the plotted STFT
data: one for a sample without any particular noise,
one for a sample with one snapping sound, and one
for a sample with two snapping sounds. This shows
the differences between the classes that can be used
by an algorithm to perform classification.
4 EXPERIMENTS
We provide uni-modal classification results as a
benchmark for our dataset. Each experiment is re-
peated five times, and the average classification accu-
racy on a test set is reported. We train a distinct deep
LSTM network (Hochreiter and Schmidhuber, 1997)
on preprocessed data for each modality. The recorded
gestures from the dataset are randomly split into train-
ing and test sets at a proportion of 80:20 before train-
ing and subsequently used as training and test data in
all uni-modal experiments.
In preliminary experiments, we identify the net-
work parameters that result in the highest classifica-
tion accuracy. We vary the learning rate ε, the num-
ber of hidden Layers L, the number of cells per layer
S, the batch size b, and the number of iterations I.
Then, we compare the resulting accuracy and use the
parameters that achieved the best results for our ex-
periments thus resulting in the network architectures
used for our experiments as shown in Table 3.
Table 3: Architectures of the LSTM networks used for our
experiments.
Modality ε L S b I
Accel. Data 0.001 5 250 500 1,000
RGB Data 0.001 2 200 250 3,000
3D Data 0.001 2 250 1,000 5,000
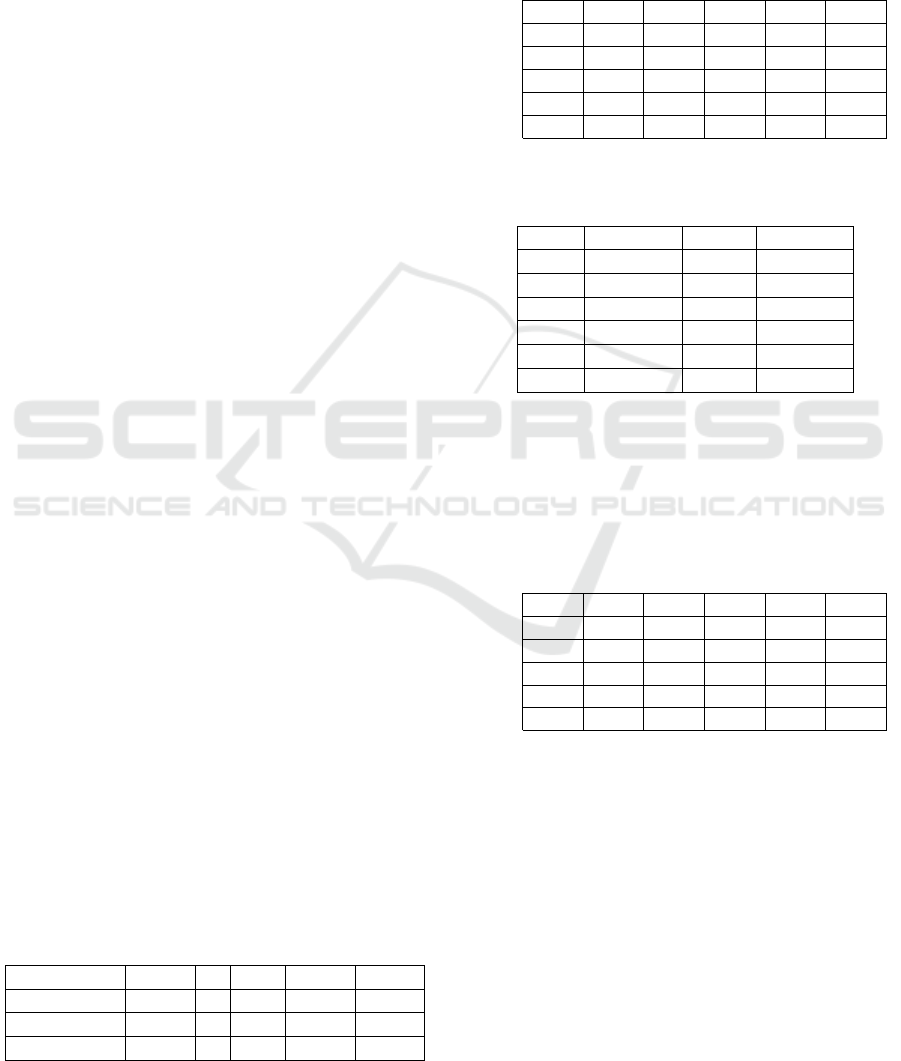
Tables 4 and 5 show the results of our uni-modal
experiments for acceleration data. It shows a uni-
modal gesture classification accuracy for the acceler-
ation data at 84%.
Table 4: Confusion matrix for the unimodal gesture classi-
fication of acceleration data.
Predicted class [0-5]
Target [0-5]
3778 37 29 17 58 31
772 3128 25 5 13 7
54 408 3358 78 45 7
24 11 489 3290 128 8
39 4 25 242 3141 499
12 1 3 14 794 3126
Table 5: Classification report for the unimodal gesture clas-
sification of acceleration data.
Class Precision Recall F1-Score
0 0.81 0.96 0.88
1 0.87 0.79 0.83
2 0.85 0.85 0.85
3 0.90 0.83 087
4 0.75 0.80 0.77
5 0.85 0.79 0.82
Tables 6 and 7 show the results of our uni-modal
experiments for RGB data, which shows that the ges-
ture classification accuracy reaches 85%.
Table 6: Confusion matrix for the uni-modal gesture classi-
fication of RGB data.
Predicted class [0-5]
Target [0-5]
3912 38 0 0 0 0
0 3447 133 57 38 285
0 247 3637 38 38 0
0 114 95 3637 114 0
0 247 0 38 2687 988
0 475 0 57 437 2991
The results for the uni-modal experiments for 3D
data can be seen in Tables 8 and 9. The gesture clas-
sification accuracy reaches 92% for this modality.
We are not using an LSTM network to classify au-
dio data since the preprocessed data are not sequential
but a single 2D image for each gesture (cf. Figure 4).
Therefore, we use a Deep Convolutional Neural Net-
work which is the state-of-the-art technique for im-
age classification. We chose the Adam Optimizer and
Cross-Entropy Loss Function to train our Deep CNN
in 10 epochs. The used CNN consists of the following
eight layers:
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset
127
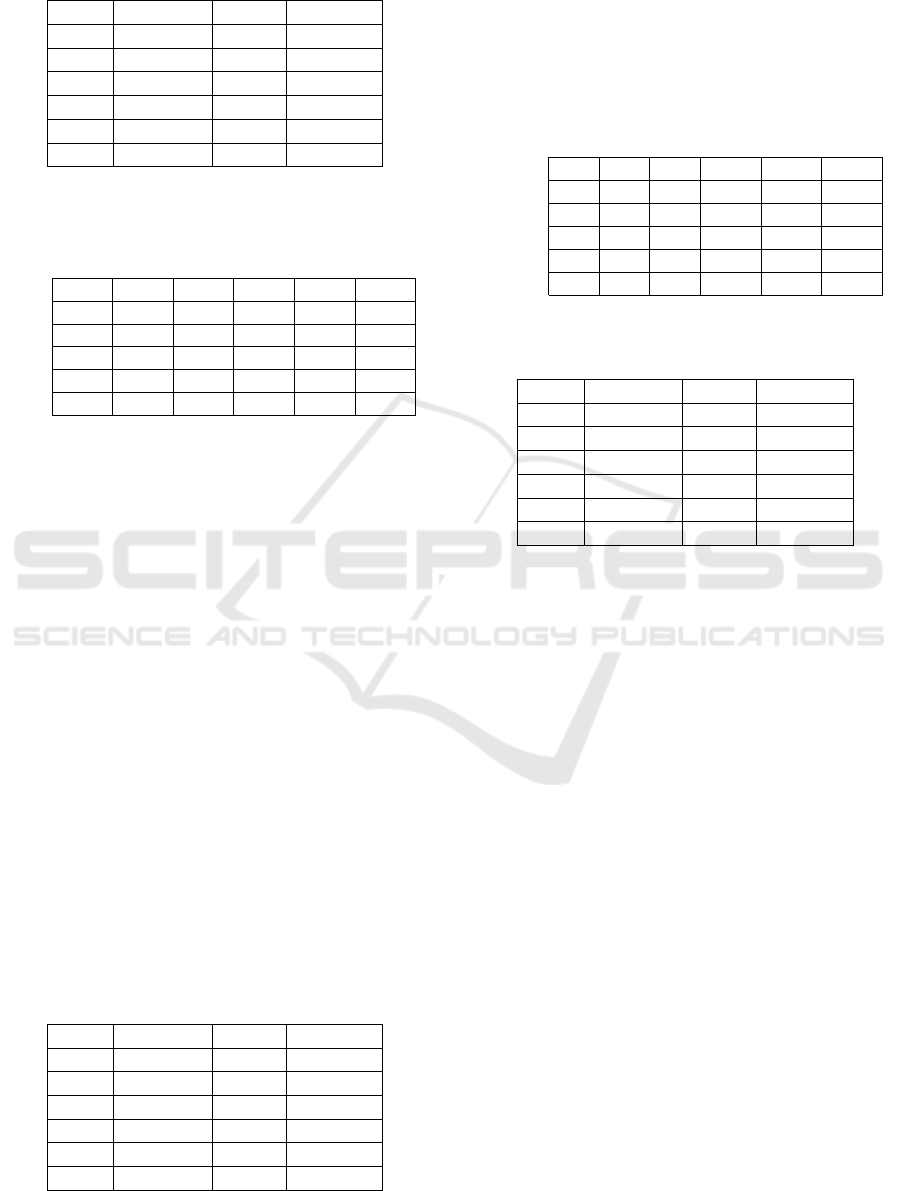
Table 7: Classification report for the unimodal gesture clas-
sification of RGB data.
Class Precision Recall F1-Score
0 1.00 0.99 0.99
1 0.75 0.86 0.80
2 0.94 0.92 0.93
3 0.95 0.92 0.93
4 0.80 0.67 0.73
5 0.69 0.74 0.72
Table 8: Confusion matrix for the uni-modal gesture classi-
fication of 3D data.
Predicted class [0-5]
Target [0-5]
3950 0 0 0 0 0
2 3928 6 12 2 0
0 6 3900 44 0 0
0 0 24 3922 4 0
2 0 0 0 3488 460
0 0 2 0 998 2950
1. A Convolutional layer with the input shape
(182, 181, 1), a filter size of 32, and a kernel size
of (3, 3).
2. A Max Pooling layer with a pooling size of (2, 2).
3. A Convolutional layer with a filter size of 64, and
a kernel size of (3, 3).
4. A Max Pooling layer with a pooling size of (2, 2).
5. A Convolutional layer with a filter size of 64, and
a kernel size of (3, 3).
6. A Reshaping Layer that flattens the input.
7. A densely connected Neural Network layer with
64 units.
8. A densely connected Neural Network layer with
10 units.
Tables 10 and 11 show the results of our uni-
modal experiments for audio data. It shows an uni-
modal gesture classification accuracy for audio data
at 45%. Unsurprisingly, the data show a high recall
Table 9: Classification report for the unimodal gesture clas-
sification of 3D data.
Class Precision Recall F1-Score
0 1.00 1.00 1.00
1 1.00 0.99 1.00
2 0.99 0.99 0.99
3 0.98 0.99 0.99
4 0.74 0.86 0.80
5 0.84 0.70 0.77
for gestures 4 (One Snap) and 5 (Two Snaps) and a
low recall for the other four gestures that do not de-
pend on sound to be distinguished. The purpose of
the audio modality lies in reinforcing predictions in
combination with other modalities.
Table 10: Confusion matrix for the uni-modal gesture clas-
sification of audio data.
Predicted class [0-5]
Target
[0-5]
772 251 304 2602 14 7
678 339 319 2609 3 2
690 251 394 2612 3 0
717 280 266 2684 0 3
126 79 61 89 3081 514
13 9 15 6 568 3339
Table 11: Classification report for the uni-modal gesture
classification of audio data.
Class Precision Recall F1-Score
0 0.26 0.19 0.22
1 0.28 0.09 0.13
2 0.29 0.10 0.15
3 0.25 0.68 0.37
4 0.84 0.78 0.81
5 0.86 0.84 0.85
We therefore also investigated the effect of fusing
different modalities using two commonly used late fu-
sion methods: max-conf, where we use the most cer-
tain uni-modal class prediction as output, and prob,
where we treat the uni-modal output layer predictions
as independent conditional probability distributions
for a class, multiply and renormalize them. We dis-
card early fusion methods because the four sensory
modalities have different numerical formats, arrive at
different frequencies, and – in the case of audio data
– are processed by a different network type.
Figure 5 shows the averaged results of our uni-
modal and multi-modal experiments.
5 LIVE SYSTEM
We confirm that it is possible to train a real-time sys-
tem on our dataset so that it can be used to correctly
classify hand gestures done by different people. For
this, we implement a live demonstrator based on the
3D modality. Our live system is split into two parts:
One part is the implementation of an LSTM network
as used for the experiments described in Section 4.
The second part is an implementation for the Robot
Operating System (ROS) that receives the sensor data
and feeds it to the trained LSTM network.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
128

Figure 5: Gesture classification accuracies achieved by the uni-modal experiments as well as selected results for the two
multi-modal fusion approaches max-conf and prob.
5.1 Implementation Details
As a proof of concept, we only show the details for
processing, training, and classifying 3D data. All
other modalities can be handled analogously.
5.1.1 Point Cloud Processor
The ROS node responsible for processing the point
clouds subscribes to the 3D camera sensor. The cam-
era publishes PointCloud2 messages at about 6 Hz
to correspond to the number of frames in the dataset.
Each message includes meta-information (i.e. height,
width, step size) and the point cloud data itself. In
this node, the point cloud is extracted from the mes-
sage and then converted according to the preprocess-
ing steps described in Section 3.4. Afterward, the
PFH is published for further processing.
5.1.2 LSTM Classifier
The second ROS node contains the LSTM classifier.
This node listens to PFH messages published by the
Point Cloud Processor. Since gestures can start at
any given moment in time, we use an approach called
Shifted Recognizer (Schak and Gepperth, 2019): N
identical classifiers or recognizers are run in parallel,
each of them is trained with the same dataset consist-
ing of gestures with a fixed length T which determines
their Temporal Receptive Field (TRF). Each of them
receives the same data from the Point Cloud Proces-
sor. However, the classifiers are delayed by ∆ =
T
N
frames w.r.t. to the other classifiers, as shown in Fig-
ure 6, and they are reset after a full TRF. If there are
enough classifiers, a gesture of length l ≤ T will cor-
relate with the TRF of a single classifier which will
then classify and report it.
In our live system, we use N = 12 LSTM classi-
fiers. Since the number of parallel classifiers equals
the number of frames per gesture, a gesture will al-
ways correlate to exactly one classifier and there will
be neither an onset nor an offset to the gesture in that
classifiers TRF.
Each node follows the same steps: First, it re-
ceives the PFH message and converts it to a Numpy
array which is then fed into the LSTM model. Then, it
publishes the classification result as a message. Each
LSTM Classifier node predicts a gesture class for ev-
ery frame they receive and publishes the result. All
predictions are further handled by the Aggregator.
5.1.3 Aggregator
The Aggregator node collects and aggregates the pre-
dictions from the twelve LSTM Classifier nodes. The
prediction with the highest prediction score will be
used. The result, i.e., the predicted gesture class, is
only presented to the user if the following conditions
apply: first of all, the prediction score must be above a
predefined threshold. In addition, the predicted class
of the LSTM node with the highest prediction score
must be the same for the last three frames. Otherwise,
no prediction is given. Thus, we ensure that there is
no prediction if the user is not performing a gesture.
5.2 Experiments
To prove that the described system can correctly clas-
sify gestures performed by persons which it was
not trained by, we conducted a series of experi-
ments. Four persons performed each gesture multiple
times, and the number of correct classifications was
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset
129
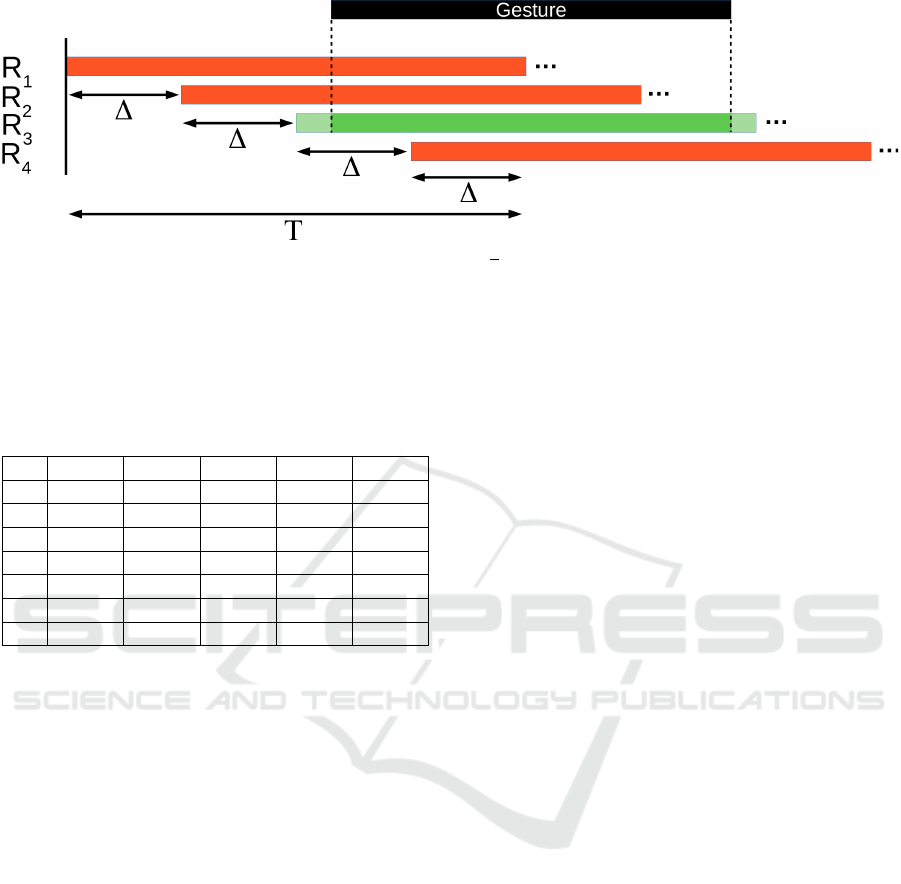
Figure 6: Example for our Shifted Recognizer approach with ∆ =
T
4
frames. The temporal receptive fields (TRFs) of each
recognizer (R
1...4
are indicated by red or green bars, while the received PFH of a conducted gesture is indicated by a black
bar. One recognizers TRF will correlate with the gesture and therefore classify the gesture correctly (green bar).
Table 12: Results for our experiments on gesture recogni-
tion with a live system trained on the MMHG dataset. P
i
notates the ratio of correct classifications for the i-th user
with i ∈ {1, 2, 3, 4}, whereas C
k
notates the k-th class as de-
scribed in Section 3.2.
P
1
P
2
P
3
P
4
∑
C
0
5/5 1/1 1/1 3/3 100%
C
1
5/5 1/1 1/1 2/3 90%
C
2
5/5 1/1 0/1 2/3 80%
C
3
2/5 0/1 1/1 1/3 40%
C
4
5/5 1/1 1/1 2/3 90%
C
5
0/5 0/1 0/1 1/3 10%
∑
73.3% 66.7% 66.7% 61.1% 66.7%
recorded. There were two female and two male users,
with differing hand sizes and skin colors to present as
much variation as possible. Every user got instructed
on how to correctly perform the gestures. The results
are shown in Table 12.
Since we only discuss results for depth data exem-
plarily, it is not surprising that the prediction for Two
Snaps does not work. When performing Two Snaps,
the system always predicts One Snap because it does
not consider sound, and the depth data is very simi-
lar for both classes. Also, Swipe Left often gets con-
fused with Thumbs Up since the angle and movement
of the hand can be pretty similar. Including IMD data
could possibly increase the number of correct classifi-
cations for this class. Recapitulatory, our experiments
show that our live system trained with gestures per-
formed by just a single person can achieve an accept-
able classification accuracy for gestures performed by
different users.
6 SUMMARY AND CONCLUSION
In this article, we provide an in-depth description of
the new publicly available MMHG dataset, as well
as the reasoning behind the design of the gesture
classes, which is to support large-scale experiments
on multi-modal data fusion. We support the suitability
of this dataset for fusion purposes by conducting ex-
periments using (admittedly very simple) late-fusion
strategies and state-of-the-art sequence classification
methods like LSTM and CNN networks. These ex-
periments show that, within the limits of statistical ac-
curacy, fusion with one or more other modalities does
improve the quality of uni-modal gesture recognition.
Notably, the audio modality, which by itself achieves
only very disappointing accuracies, can give a strong
boost when fused with others, since some gesture
classes are best characterized by audio-only. Also,
we show that our dataset can be used to train a sys-
tem to correctly classify hand gestures performed by
other users. Lastly, we have shown that multi-modal
gesture recognition is possible using techniques that
are real-time capable on off-the-shelf hardware.
In future research we will conduct experiments
with more individuals to estimate the bias in recog-
nition due to the single subject in our dataset. Also,
we will record more data – also with other subjects –
and update the dataset over time. Lastly, we will per-
form further research and conduct experiments using
probabilistic models for multi-modal sequence classi-
fication, outlier detection and sampling.
REFERENCES
Becker, S., Ackermann, M., Lapuschkin, S., M
¨
uller, K.-
R., and Samek, W. (2018). Interpreting and Explain-
ing Deep Neural Networks for Classification of Audio
Signals.
Chen, C., Jafari, R., and Kehtarnavaz, N. (2015). UTD-
MHAD: A multimodal dataset for human action
recognition utilizing a depth camera and a wearable
inertial sensor. In 2015 IEEE International Confer-
ence on Image Processing (ICIP), pages 168–172.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
130

D. Lara, O. and Labrador, M. (2013). A Survey on Human
Activity Recognition Using Wearable Sensors. Com-
munications Surveys & Tutorials, IEEE, 15:1192–
1209.
Escalera, S., Gonz
`
alez, J., Bar
´
o, X., Reyes, M., Guyon,
I., Athitsos, V., Escalante, H., Sigal, L., Argyros,
A., Sminchisescu, C., Bowden, R., and Sclaroff, S.
(2013). Chalearn multi-modal gesture recognition
2013: grand challenge and workshop summary. In
Proceedings of the 15th ACM on International con-
ference on multimodal interaction, pages 365–368.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9:1735–80.
Kim, T.-K. and Cipolla, R. (2008). Canonical correlation
analysis of video volume tensors for action catego-
rization and detection. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 31(8):1415–1428.
Kopuklu, O., Rong, Y., and Rigoll, G. (2019). Talking with
your hands: Scaling hand gestures and recognition
with cnns. In Proceedings of the IEEE International
Conference on Computer Vision Workshops.
Liu, L. and Shao, L. (2013). Learning discriminative repre-
sentations from rgb-d video data. In Twenty-third in-
ternational joint conference on artificial intelligence.
Marin, G., Dominio, F., and Zanuttigh, P. (2016). Hand
Gesture Recognition with Jointly Calibrated Leap
Motion and Depth Sensor. Multimedia Tools Appl.,
75(22):14991–15015.
McConnell, R. (1986). Method of and apparatus for pattern
recognition.
Memo, A., Minto, L., and Zanuttigh, P. (2015). Exploiting
Silhouette Descriptors and Synthetic Data for Hand
Gesture Recognition. In Giachetti, A., Biasotti, S.,
and Tarini, M., editors, Smart Tools and Apps for
Graphics - Eurographics Italian Chapter Conference.
The Eurographics Association.
Nasser, K. (2008). Digital signal processing system design:
Labview based hybrid programming.
Ni, B., Wang, G., and Moulin, P. (2011). RGBD-HuDaAct:
A Color-Depth Video Database For Human Daily Ac-
tivity Recognition. International Conference on Com-
puter Vision Workshops, IEEE, pages 1147–1153.
Radu, V., Tong, C., Bhattacharya, S., Lane, N. D., Mascolo,
C., Marina, M. K., and Kawsar, F. (2018). Multimodal
Deep Learning for Activity and Context Recognition.
Proc. ACM Interact. Mob. Wearable Ubiquitous Tech-
nol., 1(4):157:1–157:27.
Ranasinghe, S., Machot, F. A., and Mayr, H. C. (2016).
A review on applications of activity recognition sys-
tems with regard to performance and evaluation. In-
ternational Journal of Distributed Sensor Networks,
12(8):1550147716665520.
Romdhane, R., Crispim-Junior, C. F., Bremond, F., and
Thonnat, M. (2013). Activity Recognition and Un-
certain Knowledge in Video Scenes. In IEEE Inter-
national Conference on Advanced Video and Signal-
Based Surveillance (AVSS), Krakow, Poland.
Rusu, R. B., Blodow, N., Marton, Z. C., and Beetz, M.
(2008). Aligning point cloud views using persistent
feature histograms. In 2008 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pages
3384–3391. IEEE.
Sachara, F., Kopinski, T., Gepperth, A., and Handmann,
U. (2017). Free-hand gesture recognition with 3d-
cnns for in-car infotainment control in real-time. In
2017 IEEE 20th International Conference on Intelli-
gent Transportation Systems (ITSC), pages 959–964.
Sarkar, A., Gepperth, A., Handmann, U., and Kopinski, T.
(2017). Dynamic hand gesture recognition for mo-
bile systems using deep lstm. In Horain, P., Achard,
C., and Mallem, M., editors, Intelligent Human Com-
puter Interaction, pages 19–31, Cham. Springer Inter-
national Publishing.
Schak, M. and Gepperth, A. (2019). Robustness of deep
lstm networks in freehand gesture recognition. In
Artificial Neural Networks and Machine Learning –
ICANN 2019: Image Processing, pages 330–343.
Springer International Publishing.
Sharma, S., Kiros, R., and Salakhutdinov, R. (2016). Action
Recognition using Visual Attention. ICLR.
Wan, J., Zhao, Y., Zhou, S., Guyon, I., Escalera, S., and Li,
S. Z. (2016). Chalearn looking at people rgb-d iso-
lated and continuous datasets for gesture recognition.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition Workshops, pages 56–
64.
William T. Freeman, M. R. (1994). Orientation histograms
for hand gesture recognition. Technical Report TR94-
03, MERL - Mitsubishi Electric Research Laborato-
ries, Cambridge, MA 02139.
Zhang, M. and Sawchuk, A. A. (2012). USC-HAD: A Daily
Activity Dataset for Ubiquitous Acitivity Recognition
Using Wearable Sensors. International Conference on
Ubiquitous Computing, pages 1036–1043.
Zhang, Y., Cao, C., Cheng, J., and Lu, H. (2018). EgoGes-
ture: A New Dataset and Benchmark for Egocentric
Hand Gesture Recognition. IEEE Transactions on
Multimedia, 20(5):1038–1050.
Gesture Recognition on a New Multi-Modal Hand Gesture Dataset
131
