
On Configuring Directional Transmission for Path Exposure Reliability
in Energy Harvesting Wireless Sensor Networks
Abdulsalam Basabaa and Ehab S. Elmallah
Department of Computing Science, University of Alberta, 8900 114 St NW, Edmonton, Canada
Keywords:
Wireless Sensor Networks (WSNs), Energy Harvesting Wireless Sensor Networks (EH-WSNs), Path Expo-
sure Problem, Probabilistic Graph, Network Reliability, Directional Transmission.
Abstract:
In this paper, we consider a path exposure problem in energy harvesting wireless sensor networks (EH-WSNs)
where nodes are equipped with directional communication devices. Nodes harvest energy from ambient en-
vironment (e.g., solar power), and manage fluctuations in their stored energy by adjusting some of their
directional transmission parameters. Using a probabilistic graph model we formalize a problem, denoted
DirEXPO-RU, that quantifies the ability of a network to detect and report traversal along a given path as
probability representing the reliability of the network in performing the path monitoring task. A problem that
arises in managing the network resources to maximize this reliability measure is to adjust the transmission
beam width of each node, given that nodes beam centers are given as input. We develop a heuristic algorithm
to deal with the problem, and use the algorithm in a framework for computing lower bounds on the reliability
of the overall network. The obtained numerical results show improvement in the achieved network reliability.
1 INTRODUCTION
Research work on wireless sensor networks (WSNs)
where nodes are capable of directing their transmis-
sion (and/or reception) has been receiving attention
for a number of years now (see, e.g., the surveys
of (Amac Guvensan and Gokhan Yavuz, 2011; Tao
and Wu, 2015) for applications in area and barrier
coverage). In general, directional communication of-
fers improvement over omnidirectional transmission
in terms of achieving longer range (in a certain direc-
tion) for a given level of energy consumption.
Our interest in this paper is on investigating the
benefits of using this mode of transmission in the class
of energy harvesting wireless sensor networks (EH-
WSNs) that is currently receiving significant atten-
tion. In particular, we are interested in quantifying the
benefits of directional transmission to achieve good
network performance while taking a complex network
reliability measure as our objective function. We pur-
sue this goal in the context of investigating a path ex-
posure reliability measure.
The path exposure problem is a well-known WSN
problem where we want to compute the probability of
detecting a moving target along a given path (over a
period of time) through a WSN field. Early results
on the problem appears in (Megerian et al., 2002;
Clouqueur et al., 2003). In (Megerian et al., 2002),
e.g., the authors present a model that utilizes energy
sensed from a moving target over a period of time.
The model is then used to find a path of minimal ex-
posure using a shortest path algorithm. In (Clouqueur
et al., 2003), the authors analyze target detection
probability using different data fusion models, and
present a method to minimize network deployment
cost while achieving desired exposure levels. Sub-
sequently, in (Liu et al., 2009), the authors formalize
a minimal path exposure problem for WSNs employ-
ing directional communication. They develop a di-
rectional sensing model used to define two weighted
graphs that are used to reduce the minimal path ex-
posure problem into two discrete geometry problems.
Their results include developing two approximation
algorithms to solve the problem.
Our work here on a path exposure problem builds
on the results obtained in (Elmorsy et al., 2013;
Basabaa and Elmallah, 2019; Basabaa and Elmallah,
2020). In (Elmorsy et al., 2013), the authors formal-
ize a path exposure problem, called EXPO, on con-
ventional WSNs for surveillance applications where
nodes are subject to communication and/or sensing
failure. In (Basabaa and Elmallah, 2019; Basabaa
and Elmallah, 2020), we consider a restricted version
of the DirEXPO-RU problem, called EXPO-RU. In
(Basabaa and Elmallah, 2019), the EXPO-RU prob-
lem is formalized and an efficient algorithm is pre-
60
Basabaa, A. and Elmallah, E.
On Configuring Directional Transmission for Path Exposure Reliability in Energy Harvesting Wireless Sensor Networks.
DOI: 10.5220/0010981600003118
In Proceedings of the 11th International Conference on Sensor Networks (SENSORNETS 2022), pages 60-70
ISBN: 978-989-758-551-7; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
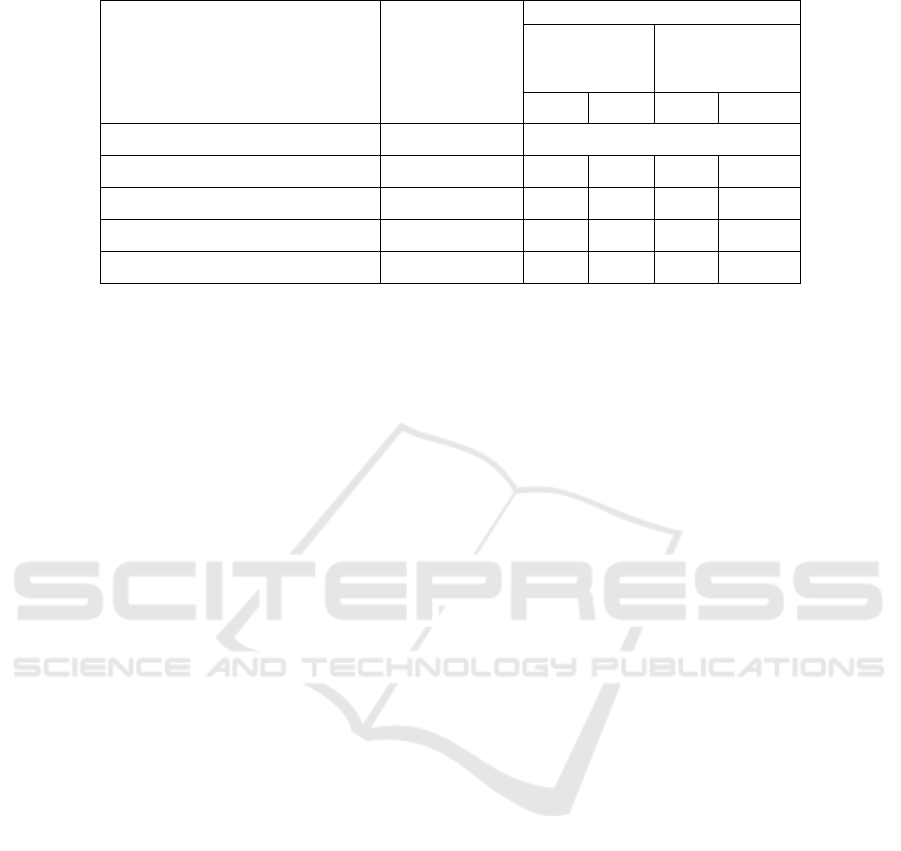
Table 1: Overview of some related results.
Reference
Problem
Obtained results
Non-iterative
improvable
algorithms
Iterative
improvable
algorithms
LB
UB
LB
UB
Current paper
DirEXPO-RU
Configuring node’s beam width
(Basabaa and Elmallah, 2021)
EXPO-RU
X X
(Basabaa and Elmallah, 2019)
EXPO-RU
X X
(Basabaa and Elmallah, 2020)
EXPO-RU
X X
(Elmorsy et al., 2013)
EXPO
X X
sented to compute lower bounds on the exact solution
of the EXPO-RU problem. In (Basabaa and Elmal-
lah, 2020), a dynamic programming approach is pre-
sented to compute bounds on exact solutions of the
EXPO-RU problem from certain network subgraphs.
The main focus of this paper is on developing ap-
proaches to configure the beam width for each node in
the network, so as to obtain good path exposure reli-
ability for the entire network, as described in the next
sections.
The rest of the paper is organized as follows: Sec-
tion 2 gives an overview of related work. The used
system model is presented in Section 3. Section 4
discusses problem formulation and configuration ap-
proaches. Based on the proposed configuration ap-
proaches, Section 5 presents an efficient heuristic al-
gorithm to configure the transmission beams of nodes.
Section 6 explains a framework to compute bounds
for the DirEXPO-RU problem, and lastly the per-
formance of the proposed approaches is evaluated in
Section 7.
2 LITERATURE REVIEW
Our work here lies in the intersection of three main re-
search areas: the general area of EH-WSNs, research
specific to the use of directional communication in
WSNs, and research on developing reliability assess-
ment methods using probabilistic graph models. In
the following, we touch on each of the three areas.
2.1 Work on EH-WSNs
We refer the reader to the surveys in (Adu-Manu
et al., 2018; Sudevalayam and Kulkarni, 2011). Spe-
cific algorithmic contributions in the area include the
work of (Jakobsen et al., 2010; Peng and Low, 2013;
Mart
´
ınez et al., 2014; Peng et al., 2015; Li et al.,
2020). In (Jakobsen et al., 2010), the authors present
a distributed routing algorithm for EH-WSNs that
aims at dynamically finding sustainable routes to the
sink. In (Peng and Low, 2013), the authors present
an energy neutral WSN routing algorithm based on
the Directed Diffusion paradigm by adding an admis-
sion control step before a node can reinforce a flow
that serves a particular interest. In (Mart
´
ınez et al.,
2014), the authors consider wastage of harvested en-
ergy when a node’s battery reaches its limit and can
not be charged. The authors formalize a route se-
lection problem that aims at reducing network wide
overcharging-wastage in each time slot of the net-
work’s operation. In (Peng et al., 2015), the au-
thors present an energy neutral clustering algorithm
for EH-WSNs that divides system’s time into time
slots. In each time slot, the network is partitioned into
a user-specified number of clusters and the data is col-
lected in each cluster. In (Li et al., 2020), the authors
propose a priority task scheduling algorithm for EH-
WSNs, where the transmission method and order of
collected data are determined according to task prior-
ity and node’s remaining energy.
2.2 Work on Directional
Communication in WSNs
Examples of work done in this area include the
work of (Duan et al., 2019) where the authors con-
sider data collection in a rechargeable sensor network
that is powered by directional wireless power trans-
fer (DWPT). The DWPT provides directional energy
beams using higher antenna gain for increasing en-
ergy efficiency. Also, the work of (Zhang et al., 2009;
Zhu et al., 2019), where the authors in (Zhang et al.,
2009) study a strong barrier coverage problem in di-
rectional sensor networks. They present an integer
linear programming model, and present two efficient
algorithms to solve the problem. The authors in (Zhu
On Configuring Directional Transmission for Path Exposure Reliability in Energy Harvesting Wireless Sensor Networks
61

et al., 2019) discuss the problem of deploying envi-
ronmental energy harvesting directional sensor net-
works with the minimum cost, where targets have dif-
ferent coverage requirements and the average energy
harvesting rate of each node should not be less than
its consumption rate. They formulate a mixed inte-
ger linear programming problem, and propose three
heuristics algorithms to solve the problem.
2.3 Work on WSNs Reliability for a
Path Exposure Problem
Here, we position the work done in this paper among
a few results that we have recently obtained on the
EXPO-RU problem. Table 1 gives an overview of the
results. In Table 1, the EXPO problem is the path
exposure reliability problem on conventional WSNs
where nodes are subject to failure (either in commu-
nication or sensing). Methods of assessing the net-
work reliability are classified as being either itera-
tively improvable or non-iteratively improvable. The
earlier type can achieve exact results if allowed to
work to completion. Else, they provide either a lower
bound (LB), or and upper bound (UB). In contrast,
the latter type produces a single bound (LB or UB)
on each input. Our work in this paper on configur-
ing beam width in directional transmission utilizes an
iteratively improvable LB algorithm to obtain numer-
ical results.
3 OVERVIEW OF SYSTEM
MODEL
In this section, we introduce the needed assumptions
and notations about the node model, the network
model, and the directional transmission model.
3.1 Node Operation Model
We assume that each node x in a given EH-WSN is
equipped with a directional communication device,
and an omnidirectional sensing device. Energy har-
vested at each node x fluctuates over time. For the
purpose of simulating the network (e.g., to obtain
the probability distributions mentioned below), we as-
sume that time is divided into equal length slots.
Since wireless transmission is the most energy
consuming activity in many WSNs, we assume that
such fluctuations affect the transmission range of a
node (but does not affect much its sensing range). An
energy management unit (EMU) in each node con-
trols a node’s state during any time slot. Our work
employs a multi-state node model for each node. In
its basic form, the model associates 3 states with each
non-sink node x, defined as follows.
• If x’s stored energy level during a time slot lies
in some high range (say, e.g., [70%-100%]) of its
total energy storage capacity then the EMU puts x
in a full energy state where the node’s maximum
transmission range, denoted R
f ull
, is high.
• Else, if x’s stored energy level during a time slot is
in some lower range (say, e.g., [40%-70%]) of its
total energy storage capacity then the EMU puts x
in a reduced energy state where the node’s maxi-
mum transmission range, denoted R
red
, is lower.
• Else, if x’s stored energy level is lower than the
above, we consider the node to be in a failed state.
3.2 Network Reliability Model
Similar to our previous work in (Basabaa and Elmal-
lah, 2019), we adopt a network reliability model that
abstracts the above node dynamics over a long oper-
ation time by associating with each node x a prob-
ability distribution where for each possible state s ∈
{ f ull,reduced, f ail} we know the probability p
s
(x)
(also denoted p(x,s)) that node x is in state s (here,
p
f ail
(x) = 1 − p
f ull
(x) − p
red
(x)). In addition, we as-
sume that different nodes are assigned different states
independently of each other. Such an assumption is
common in the literature to simplify the analysis, and
also to take care of applications where different nodes
perform different tasks independent of each other.
In overall, an EH-WSN is modelled over a long
period of time by a probabilistic graph (G, p) where
G = (V ∪ {sink}, E) is a directed graph on a set V of
EH wireless nodes, a non-EH and fully operational
sink node, and a set E of directed communication
links (also referred to as directed edges or arcs). The
length of each arc (x,y) ∈ E emanating from a node
x depends on the energy state of x and also the direc-
tional transmission parameters associated with x, as
explained below. We note that G is a directed multi-
graph with parallel arcs. Parallel arcs from a node a
to a node b arise since if (a, b) exists when a is in the
full energy state then (a,b) may also exist when a is
in the reduced energy state (yet, they are considered
two different arcs).
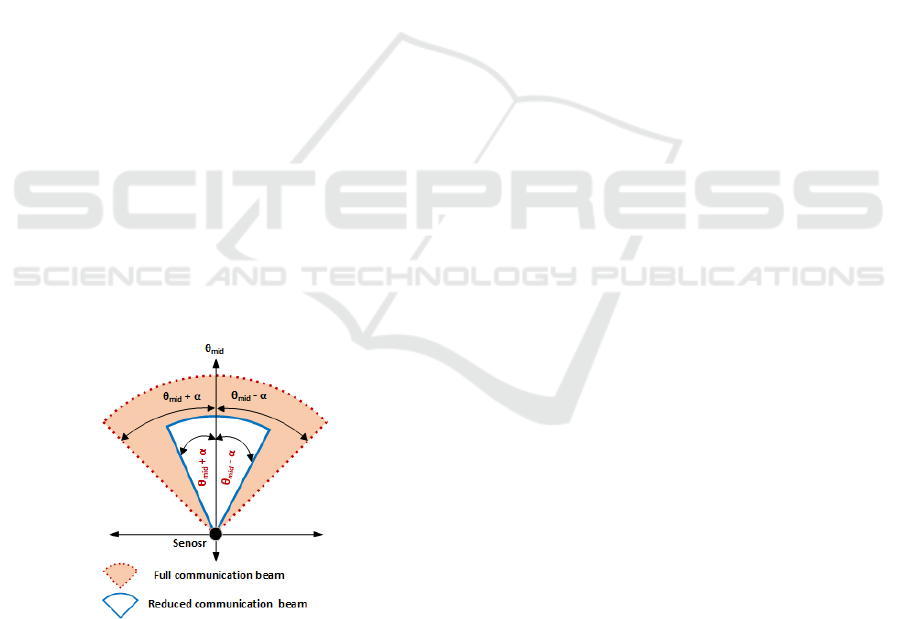
3.3 Node Directional Communication
Model
We assume that all nodes in G are deployed in
a 2-dimensional space, where each node has an
(x,y)-coordinate. The transmission beam of each
SENSORNETS 2022 - 11th International Conference on Sensor Networks
62
node x (when x is in either the full, or the re-
duced state) can be obtained from the node’s di-
rectionality parameters, denoted DIR
comm
(x). Our
model uses the following parameters: DIR
comm
(x) =
{Θ
mid
,α
f ull
,α
red
,R
f ull
,R
red
} where
• Θ
mid
is a counterclockwise (CCW) angle between
two rays emanating from x. The first ray is a hori-
zontal ray (i.e., parallel to the x-axis) that extends
to the right. The second ray defines the middle of
x’s transmission beam, see, e.g., Fig. 1.
• For α = α
f ull
, the angle Θ
mid
−α (or, Θ
mid
+α) is
a CCW angle between two rays emanating from x .
The first ray is a horizontal ray as above. The sec-
ond ray defines the start (respectively, the end) of
x’s full range transmission beam (thus, x’s beam
is of width 2α). When α = 180
◦
, the beam is of
width 360
◦
, and node transmission becomes om-
nidirectional. A similar definition applies when
α = α
red
to describe the reduced transmission
beam.
• R
f ull
(or, R
red
) is the maximum x’s transmission
range when x is in the full (respectively, reduced)
state, and the angle α is sufficiently narrow (e.g.,
α = 1
◦
).
• For a given half-width beam angle α = α
f ull
, the
actual full transmission range of a node x depends
on R
f ull
and the angle α. We use R
f ull
(α) to re-
fer to such an actual transmission range. In gen-
eral, such a transmission range decreases as α in-
creases. Similarly, we use R
red
(α) to refer to a
node’s reduced transmission angle when α = α
red
.
Figure 1: Node directional communication model.
In Section 7, we experiment with grid networks
having diagonal links. Each grid network has a sink
node located at (x,y)-coordinates (0,0), and the grid
has horizontal (and vertical) links parallel to the x-
axis (respectively, the y-axis), in addition to the di-
agonal links. The horizontal (and vertical) distance
between two horizontally (respectively, vertically) ad-
jacent nodes is set to 100 units. For full energy trans-
mission, we set R
f ull
(α = 1
◦
) = 360 units, and use a
function that reduces the transmission range linearly
so that R
f ull
(α = 180
◦
) = 180 units (for omnidirec-
tional transmission). Likewise, for reduced energy
transmission, we set R
red
(α = 1
◦
) = 180 units, and
R
red
(α = 180
◦
) = 100 units.
4 PROBLEM FORMULATION
AND CONFIGURATION
APPROACHES
In this section, we start by reviewing (in Section 4.1)
the definition and key remarks on a WSN path expo-
sure reliability assessment problem, called EXPO-RU
(for path exposure with range uncertainty). The prob-
lem is defined on EH-WSNs where fluctuations in a
node’s stored energy affect primarily its transmission
range.
In the context of designing EH-WSNs with direc-
tional communication nodes, we aim at developing
methods to configure node transmission dynamically
so as to increase the overall network path exposure
reliability. Achieving this goal is non-trivial since
the EXPO-RU assessment problem has been shown in
(Basabaa and Elmallah, 2021) to be intractable (#P-
hard), and there is no simple optimization criterion
that can be used to adjust the node directionality pa-
rameters so as maximize the overall network reliabil-
ity. As a starting point, and working toward our goal,
we present in Section 4.2 two approaches for adjust-
ing the directionality parameters, so as to obtain good
network reliability performance.
4.1 Review of the EXPO-RU Problem
The EXPO-RU problem is defined in, e.g., (Basabaa
and Elmallah, 2019). Several results on the problem
appears in (Basabaa and Elmallah, 2020).
In the problem, we are given a WSN, and a path
P across the network that we need to monitor against
unauthorized traversal. Nodes that are in close prox-
imity of P can sense the path. Such nodes are called
sensing nodes (specified as part of the input). The in-
put also specifies an integer k
req
≥ 1 of sensing nodes
that need to sense and report an intrusion event for the
network to succeed in its monitoring task. As men-
tioned above, the EH-WSN reacts to fluctuations in
a node’s stored energy by adjusting the node’s trans-
mission range. The EXPO-RU problem uses a prob-
abilistic graph (G, p) to model the network. In addi-
tion, the problem formulation assumes that different
On Configuring Directional Transmission for Path Exposure Reliability in Energy Harvesting Wireless Sensor Networks
63
nodes behave independently of each other.
During a short random time interval, the network
G is in some network state S where each node x
is in some state s
x
∈ { f ull, reduced, f ail}. We use
S = {(x, s
x
) : x ∈ V, s
x
∈ { f ull, reduced, f ail}} to refer
to any such network state. Since nodes assume states
independent of each other, the probability that a given
network state S arises is Pr(S) =
∏
(x,s
x
)∈S
p(x,s
x
).
Each network state S is either operating or failed. To
be operating, nodes in S should assign states such that
at least k
req
sensing nodes in S can reach the sink
node. Else, S is in a failed state.
The EXPO-RU problem is called to compute the
probability that the network G is in an operating state
S. We denote such probability by Expo(G, p,P,k
req
),
or Expo(G, p) for short. Complete enumeration of all
network states can be used to compute Expo(G, p) ex-
actly. However, such an algorithm has a running time
that grows exponentially with the number of nodes in
G. More generally, it has been shown in (Basabaa
and Elmallah, 2021) that the EXPO-RU problem is
#P-hard.
In addition to the concept of network state, we
need the following concepts to discuss our method for
bounding the network reliability measure.
A network configuration C is a partial network state
where some nodes (but not necessarily all) are as-
signed states (an empty configuration is valid) and the
remaining unassigned nodes are free in C. A Pathset
is an operating network configuration that has at least
k
req
sensing nodes that can reach the sink and monitor
the given intrusion path P. A minpath is a minimal
pathset.
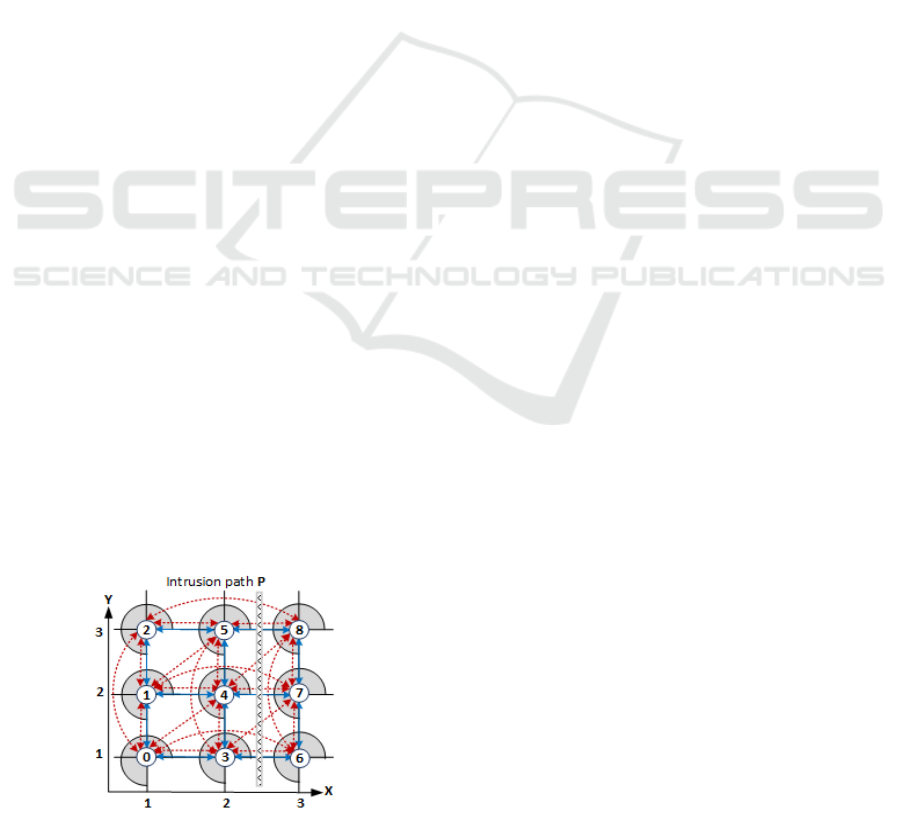
Example. Fig. 2 shows an instance of a 3 × 3 grid
network with one unit of horizontal (or, vertical) spac-
ing. The dashed lines (coloured red) represent com-
munications in full power whereas the solid lines
(coloured blue) represent communications in reduced
power. In Fig. 2, if k
req
= 2, then the configuration
C = {(3,reduced), (4, f ull)} is a pathset and, indeed,
it is a minpath.
Figure 2: An instance of a 3 × 3 grid network.
In this paper, we use the name DirEXPO-RU to
refer to the EXPO-RU problem when nodes employ
directional transmission.
4.2 Approaches for Adjusting
Directional Transmission
Given a node x in a state s ∈ { f ull,reduced}, we
present in this section two approaches for config-
uring the directionality parameters of the node-state
pair (x,s). We assume that the given problem in-
stance specifies (as part of the input) the angle Θ
mid
that determines the direction of the middle line of x’s
transmission beam (e.g., one may use the direction
of the line segment between x and the sink node).
To adjust the half-width angle α(x,s) for node x in
state s, we experiment with the following two ap-
proaches that aim at maximizing the performance
measure Expo(G, p).
4.2.1 Approach 1
In this approach, we adjust the angle α(x,s) so as to
maximize the out-degree, denoted deg
+
(x,s), of node
x. Equivalently, we seek to maximize the number of
out-neighbours reachable from node x in state s. We
recall that the actual transmission range R
f ull
(α) (or,
R
red
(α)) decreases as α increases. The rationale of
this approach is that the more directed links that ex-
ist in any network state S of the resulting probabilis-
tic graph (G, p), the more likely that Expo(G, p) in-
creases.
We next remark that maximizing deg
+
(x,s) for
the node-state pair (x, s) is a local operation to node
x that does not depend on the directionality setting
of other nodes. Our implementation of this approach
(present in next section) performs sequential search
for finding an optimized angle α(x,s) in the interval
[1
◦
,180
◦
] in increments of some sufficiently small an-
gle δ (e.g., δ = 1
◦
).
4.2.2 Approach 2
The above approach seeks to maximize the number of
out-neighbours of node x in state s. In this approach,
we consider the quality of such out-neighbours. In
particular, this approach makes an effort to adjust the
angle α(x,s) so as to give preference to include out-
neighbour y of x depending on the quality of the best
found directed path, denoted P
∗
y,sink
, from y to the sink
node. Based on the quality of such a best found path,
we associate with node y a preference weight, de-
noted w(y), that takes on a value that is proportional
to the goodness of the corresponding best found di-
rected path P
∗
y,sink
.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
64

We next remark that unlike the first approach,
finding such a best path P
∗
y,sink
depends on the direc-
tionality setting of nodes other than node x (including
node y). To simplify the search for such a best path,
we adopt a heuristic solution that assumes that each
node z, z 6= x, operates in an omnidirectional (full or
reduced) mode.
As done in approach 1, we perform a sequential
search for a good setting of the angle α(x, s) in the
range [1
◦
,180
◦
] in increments of some sufficiently
small angle δ (e.g., δ = 1
◦
). At each search step,
the angle α(x,s) is assigned a certain value, and each
node z ∈ V , z 6= x, is assumed to be omnidirectional.
With the angle α(x,s) assigned a specific value in
each search step, node x can reach a subset of its
possible out-neighbours, denoted S
α(x,s)
. With each
possible out-neighbour y of x assigned a preference
weight w(y), we define the weight of the set S
α(x,s)
to be w(S
α(x,s)
) =
∑
y∈S
α(x,s)
w(y). Then, the search al-
gorithm selects an angle α(x, s) that gives the highest
w(S
α(x,s)
).
The details of computing the preference weight
w(y) of a possible out-neighbour y of x follows the
following steps.
1. Let (a, b) be an arc in the probabilistic graph
(G, p) that exists when node a is in state s ∈
{ f ull,reduced}. We recall that typically the
graph G has many parallel arcs since an arc (a, b)
that exists when node a is in the full state may
also exist when a is in the reduced state (and the
two arcs are considered to be different). We asso-
ciate with each such an arc (a,b) a cost, denoted
cost(a,b), that takes on a small value when the
node state probability p(a, s) takes on a high value
(e.g., cost(a,b) = −log p(a, s)).
2. The cost of a directed path P
(y,sink)
from a node y
to the sink, denoted cost(P
(y,sink)
), is the sum of
the costs of its arcs.
3. We set the directed graph G
x
to be G with node x
deleted. Taking arc costs as distances in G
x
and
the sink node as a destination, we solve a single-
destination shortest paths problem to find a short-
est path from each potential out-neighbour y of x
to the sink. We denote such a shortest path by
P
∗
y,sink
.
4. Finally, we assign a preference value w(y) to node
y so that the value is inversely proportional to the
cost(P
∗
y,sink
) (e.g., w(y) = 1/cost(P
∗
y,sink
)).
We conclude this section by noting that the two
above approaches also apply when each node has
multiple states (i.e., not only the basic 3-state model
used to explain the approaches).
5 MORE ALGORITHMIC
DETAILS
In this section, we present a heuristic algorithm,
called HWAS (for half-width angle selection), that
utilizes the two proposed approaches (explained in
Section 4.2) to configure the transmission beams of
each individual node x in the network given its work-
ing direction Θ
mid
. The devised HWAS algorithm
produces two different types of results based on the
selected approach.
5.1 Algorithm Idea
Consider an instance (G, p) of the DirEXPO-RU
problem with directional parameters DIR
comm
(x) =
{Θ
mid
,α
f ull
,α
red
,R
f ull
,R
red
} for each node x ∈ G,
where Θ
mid
, R
f ull
, and R
red
are given. Our devised
algorithm configures the directionality parameters for
each individual node x ∈ G by finding the half-width
angle α(x,s) for node x in state s using Approach 1
and Approach 2.
The algorithm utilizes an associative array, de-
noted Best
α
, to store such α(x, s) values. In other
words, Best
α
provides a key-value mapping, where
a key is a tuple (x,s) of node x in state s (e.g.,
s ∈ { f ull,reduced}), and the corresponding value is
α(x,s).
In particular, the algorithm configures the direc-
tionality parameters of the node-state pair (x , s) by
performing the following steps:
1. Perform a sequential search for a good setting
of the angle α(x,s) in the range [1
◦
,180
◦
] in
increments of some sufficiently small angle δ
(e.g., δ = 1
◦
), which implies adjusting the trans-
mission beam of node x in state s to reach a
subset of its possible out-neighbours, denoted
S
α(x,s)
. After processing all α(x,s), we obtain a set
{S
α
1
(x,s)
,...,S
α
180
(x,s)
} of possible out-neighbours
of x that correspond to values of α(x , s).
2. We evaluate the obtained set, and select a member
S
α(x,s)
using either Method-1 or Method-2 (ex-
plained below).
3. Then, we set Best
α
(x,s) = α(x, s) that corresponds
to the best subset S
α(x,s)
of out-neighbours of x in
state s.
5.1.1 Method-1
This method is based on Approach 1 (explained in
Section 4.2). It is a baseline method that selects
α(x,s) for each node x ∈ G based on the number
of out-neighbours of x. The approach aims at
On Configuring Directional Transmission for Path Exposure Reliability in Energy Harvesting Wireless Sensor Networks
65
increasing the reachablity of node x to maximize
the performance measure Expo(G, p). In particular,
Method-1 works by selecting a member S
α(x,s)
of
{S
α
1
(x,s)
,...,S
α
180
(x,s)
} that has the highest number
of out-neighbours of x. We set Best
α
(x,s) = α(x,s)
corresponding to the selected member S
α(x,s)
.
5.1.2 Method-2
This method is based on Approach 2. It is a cost-
based method that selects a subset S
α(x,s)
for each
node x ∈ G based on good out-neighbours of x in state
s, and hence can improve the performance measure
Expo(G, p). In particular, Method-2 works by select-
ing a member S
α(x,s)
of the set {S
α
1
(x,s)
,...,S
α
180
(x,s)
}
that has the highest weight, w(S
α(x,s)
), as explained
in Section 4.2. Then, we set Best
α
(x,s) = α(x , s)
corresponding to the selected member S
α(x,s)
of out-
neighbours of x in state s.
After computing α
f ull
and α
red
for each node
x ∈ G, the actual f ull (respectively, reduced) trans-
mission range of a node x is calculated as explained in
Section 4.2. Therefore, f ull (respectively, reduced)
arcs for each node x ∈ G are added based on node’s
directionality parameters DIR
comm
(x).
Function HWAS(G, p)
Input: An instance (G, p) of the DirEXPO-RU
problem, and DIR
comm
(x) for each node x ∈ G
Output: Compute α(x,s) where x ∈ G and
s ∈ { f ull,reduced}
1. set Best
α
= {}
2. foreach (node x ∈ G)
{
3. foreach (node state s ∈ { f ull, reduced})
{
4. for (α = 1
◦
to 180
◦
step δ)
{
5. find set {S
α
1
(x,s)
,...,S
α
180
(x,s)
} of subsets
of out-neighbours of x as explained in
the text
}
6. evaluate the obtained set and select a subset
S
α(x,s)
for x in state s using Method-1 or
Method-2 as explained in the text
7. set Best
α
[(x,s)] = α(x,s) that corresponds to
S
α(x,s)
}
}
8. return Best
α
Figure 3: Function HWAS for the DirEXPO-RU problem.
5.2 Algorithm Details
Fig. 3 shows a pseudo code for function HWAS. Step
1 initializes array Best
α
used to store α(x,s) for all
nodes in G. The nested loop in Steps 2 and 3 iter-
ates over each node-state pair (x,s) to find its half-
width angle α(x, s). Steps 4 and 5 perform a sequen-
tial search for a good setting of an angle α(x,s) in
the range [1
◦
,180
◦
] (in increment of δ = 1
◦
). This
process generates a set {S
α
1
(x,s)
,...,S
α
180
(x,s)
} of pos-
sible subsets for node x’s neighbours. Step 6 eval-
uates each generated set, and selects a subset S
α(x,s)
using either Method-1 or Method-2. Step 7 sets
Best
α
(x,s) = α(x,s) corresponding to the best subset
S
α(x,s)
of the out-neighbours of x in state s. Finally
Step 9 returns Best
α
.
5.3 Running Time
Consider an input problem instance on a 3-state net-
work with n nodes. Denote by d
max
the maximum
possible out-degree of any node (d
max
≤ n−1). Thus,
the maximum possible number of arcs in the network
is m ≤ d
max
(n − 1).
Method-1 iterates a fixed number of times (de-
pending on the increment angle δ) over every node-
state pair (x, s). Each iteration examines at most d
max
possible out-neighbours of x. Thus, the algorithm re-
quires O(n · d
max
) time.
Similarly, Method-2 iterates over every node-state
pair (x, s). Each iteration solves a single-destination
shortest paths in time Θ(n + m) time (see, e.g., (Cor-
men et al., 2009)). Thus, the algorithm requires
O(n · (n + m)) time.
6 COMPUTING BOUNDS
One main contributions in this work is obtain-
ing lower bounds (LBs) on Expo(G, p, k
req
) for the
DirEXPO-RU problem where each input graph G
is constructed by our devised HWAS configuration
methods. To compute the Expo measure for any given
problem instance, we use an iteratively improvable
method, called the factoring method. Reference (Ball
et al., 1995) is among the early references to this gen-
eral method. Subsequently the method has been used
to obtain lower and upper bounds on many reliability
problems, including the class of path exposure prob-
lems (see, e.g., (Elmorsy et al., 2013; Basabaa and El-
mallah, 2019)). In (Elmorsy et al., 2013), the authors
adapt the factoring method to compute lower bounds
(LBs) and upper bounds (UBs) of the EXPO problem
SENSORNETS 2022 - 11th International Conference on Sensor Networks
66

by generating s-disjoint pathsets and cutsets, respec-
tively.
In more details, the factoring algorithm systemati-
cally generates a set of pairwise statistical disjoint (s-
disjoint, for short) configurations that can be used to
obtain bounds from the sum of disjoint products. We
call two configurations C
1
and C
2
s-disjoint if at least
one node, say x, that appears in both C
1
and C
2
is as-
signed two different states in the two configurations.
So, Pr(C
i
) + Pr(C
j
) is the probability of obtaining at
least C
i
and/or C
j
. For the DirEXPO-RU problem,
e.g., the configurations C
1
= {(1, reduced),(2, f ail)},
and C
2
= {(1, f ull),(2, f ail)} are s-disjoint since
node 1 is assigned two different states in C
1
and C
2
.
For the EXPO-RU problem (with omnidirectional
transmission), the work in (Basabaa and Elmallah,
2019) develops an efficient function, called E2P (for
extension to a pathset), that extends (if possible) a
given configuration C to a pathset. The authors use the
function within the factoring method to obtain LBs on
the solutions. In this context, the method generates a
set {P
1
,P
2
,··· ,P
r
} of pathsets such that
Expo(G, p,k
req
) ≥
r
∑
i=1
Pr(P
i
) (1)
In the next section, we present results based on us-
ing this latter method to compute LBs on problem in-
stances generated by our HWAS configuration meth-
ods.
7 NUMERICAL RESULTS
In this section, we present selected numerical re-
sults to evaluate and compare the performance of
the devised directional transmission configuration ap-
proaches.
Test networks. The selected results are for a class
of networks that can be viewed as extended 2-
dimensional square grid networks (denoted x-grids).
Any such W×W network G has W rows (and columns)
indexed as 0,1,2,··· ,W − 1 from bottom to top (re-
spectively, left to right). Each node has (x,y)-
coordinates. The sink node is placed at the origin at
coordinates (0,0). Rows (respectively, columns) run
horizontally (respectively, vertically) parallel to the x-
axis (respectively, the y-axis). The horizontal (or ver-
tical) distance between two consecutive nodes in the
grid is set to 100 units.
As explained in Section 3.3, when a node is in
the full energy state its actual transmission range is
assumed (for simplicity) to decrease linearly from
R
f ull
(α = 1
◦
) = 360 units to R
f ull
(α = 180
◦
) = 180
units (the omnidirectional case) as the half-width
beam angle α increases. Thus, e.g., with omnidi-
rectional transmission of an internal node x, the node
can reach 8 other nodes (corresponding to 4 horizon-
tal and vertical neighbours, and 4 diagonal nodes).
Likewise, when a node is in the reduced energy state
its actual transmission range decreases linearly from
R
red
(α = 1
◦
) = 180 units to R
red
(α = 180
◦
) = 100
units as the half-width beam angle α increases. Thus,
with omnidirectional transmission of an internal node
x, the node can reach 4 other nodes. In each x-grid,
the intrusion path P runs vertically between the right-
most two columns. Only nodes that lie on the imme-
diate left and right of P sense the path.
Node-state Probabilities. We obtain results with
95% confidence and each point in each obtained curve
is the average of 20 runs, where each run assigns to
each node x random p
f ull
(x) and p
red
(x) such that
p
f ull
(x) + p
red
(x) + p
f ail
(x) = 1 and each run com-
pletes within 71 seconds.
Reliability Lower Bounding Method. In each run, a
LB on Expo(G, p) is obtained by the factoring algo-
rithm after performing 1000 iterations.
Graph Legend. Labels Method-1 and Method-2 re-
fer to results obtained using our devised HWAS algo-
rithm based on Approach 1 and Approach 2 , respec-
tively. The Omni label refer to results obtained using
omnidirectional transmission.
7.1 Effect of Varying Θ
mid
In this set of experiments, we explore the ability of
our two devised approaches to configure the beam-
widths of each node so as to achieve good LBs on the
exposure reliability measure. We utilize a 6 × 6 x-
grid, and vary Θ
mid
in the range [0
◦
,360
◦
] (all nodes
use the same Θ
mid
value). We recall that for each
node x and state s ∈ { f ull,reduced}, the proposed
approaches are used to configure the angles α(x,s),
and consequently the out-neighbours of node x.
Fig. 4a presents a histogram of the average num-
ber of links in the network that results from using ran-
dom node-state probabilities (explained above). The
average number of links achieved by the omnidirec-
tional configuration is constant (independent of Θ
mid
).
Method-1 has a particular strength in maximizing the
out-degree of each node, Thus, it achieves the high-
est average number of total links in the network.
Method-2, however, produces a comparable number
of links in the graph.
Fig. 4b presents curves of the average LB on the
On Configuring Directional Transmission for Path Exposure Reliability in Energy Harvesting Wireless Sensor Networks
67
computed Expo(G, p) measure. Method-2 has a par-
ticular strength in selecting for each node x reacha-
bility to out-neighbours that are deemed to be good
in reaching the sink node. Thus, one expects the re-
sulting LBs to outperform LBs obtained from the two
other methods. This expected behaviour is confirmed
in the figure.
0 45 90 135 180 225 270 315
Θ
mid
= 180
o
0
150
300
450
600
750
900
Number of links
Omni
Method-1
Method-2
(a) Number of links
0 45 90 135 180 225 270 315
Θ
mid
= 180
o
0.0
0.2
0.4
0.6
0.8
1.0
Exposure (LB)
Omni
Method-1
Method-2
(b) Exposure
Figure 4: Links and exposure versus Θ
mid
∈ [0
◦
,360
◦
].
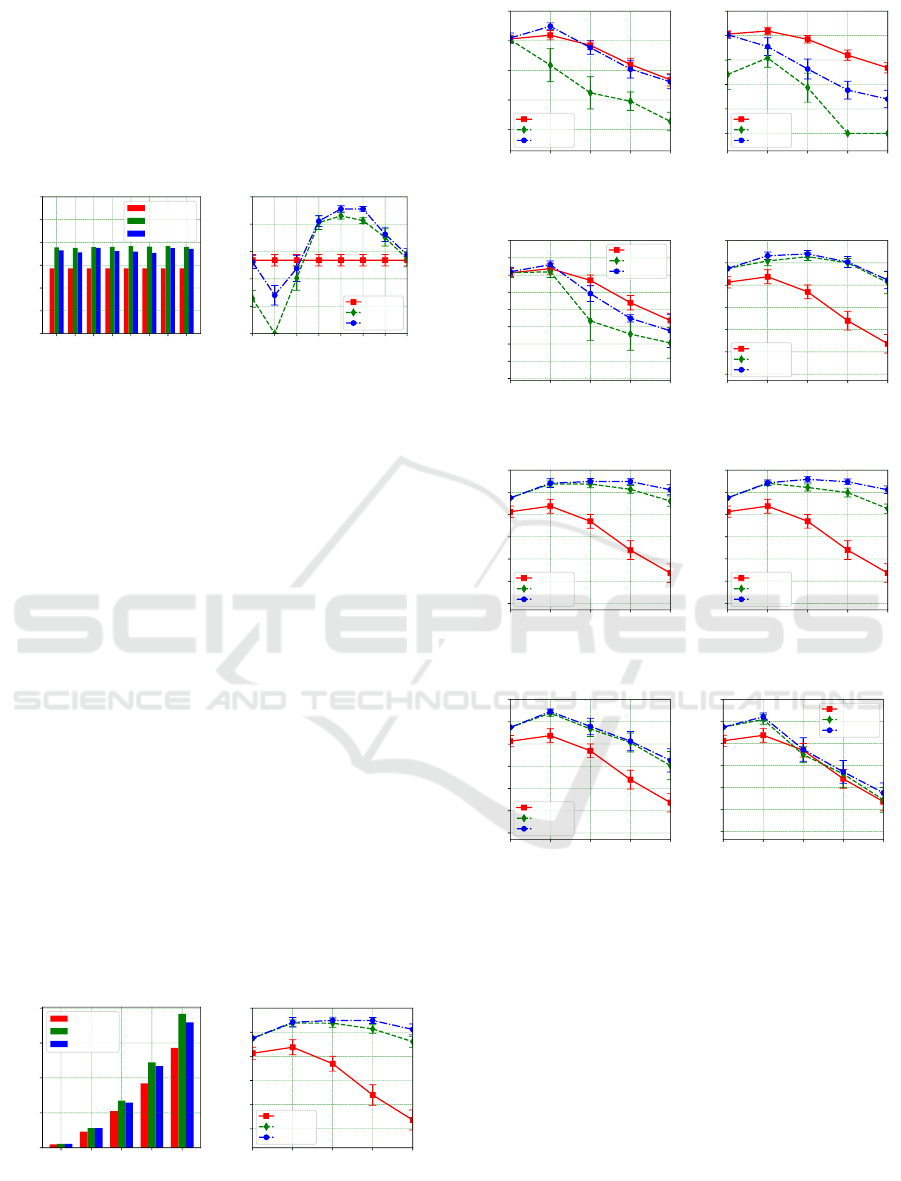
7.2 Effect of Varying Network Size
Here, we show the effects of using different networks
of size W × W, where W ∈ [2, 6] and Θ
mid
= 180
◦
,
on the obtained number of links and exposure. The
proposed approaches are used to configure the trans-
mission beams of each node for both the f ull and
reduced power states. Fig. 5a and Fig. 5b show the
obtained number of links and exposure, respectively,
for all methods: Method-1, Method-2, and the Omni
method.
Fig. 5a shows that the number of links increases
as network’s size increases for all used methods as
a large network will have a higher number of nodes,
and hence more links. However, Method-1 obtains
the highest number of links compared to Method-2
and the Omni method. Fig. 5b shows that the ob-
tained results by Method-1 and Method-2 outperform
the Omni method for different network sizes. The
results illustrate the advantages of using directional
sensors over omnidirectional as they provide a higher
level of tunability needed in optimizing their perfor-
mance when network’s size increases.
2 3 4 5 6
Network size
0
150
300
450
600
Number of links
Omni
Method-1
Method-2
(a) Number of links
2 3 4 5 6
Network size
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(b) Exposure
Figure 5: Links and exposure versus network size.
2 3 4 5 6
Network size
0.2
0.4
0.6
0.8
1.0
Exposure (LB)
Omni
Method-1
Method-2
(a) Θ
mid
= 0
◦
2 3 4 5 6
Network size
0.0
0.2
0.4
0.6
0.8
1.0
Exposure (LB)
Omni
Method-1
Method-2
(b) Θ
mid
= 45
◦
2 3 4 5 6
Network size
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(c) Θ
mid
= 90
◦
2 3 4 5 6
Network size
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(d) Θ
mid
= 135
◦
2 3 4 5 6
Network size
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(e) Θ
mid
= 180
◦
2 3 4 5 6
Network size
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(f) Θ
mid
= 225
◦
2 3 4 5 6
Network size
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(g) Θ
mid
= 270
◦
2 3 4 5 6
Network size
0.4
0.5
0.6
0.7
0.8
0.9
1.0
Exposure (LB)
Omni
Method-1
Method-2
(h) Θ
mid
= 315
◦
Figure 6: Obtained bounds versus network size.
7.3 Identifying Good Working Direction
Θ
mid
Configuring the direction of the transmission beam
center (determined by the angle Θ
mid
) of nodes in the
network is critical for obtaining good performance.
In cases when this parameter is misconfigured for a
node, it is hoped that by adapting the beam width the
node can still deliver acceptable performance.
In this set of experiments, we examine this as-
pect when using W×W x-grids and varying W in the
range [2,6]. Since the sink node is placed at the (x,y)-
SENSORNETS 2022 - 11th International Conference on Sensor Networks
68
coordinate (0,0), the direction of the line between a
node x and the sink varies in the range [180
◦
,270
◦
]
(180
◦
for nodes on the x-axis, and 270
◦
for nodes on
the y-axis).
Fig. 6 shows detailed obtained results when
changing Θ
mid
in the range [0
◦
,360
◦
]. The results
show that directional settings outperform the omni-
directional setting when all nodes are oriented so that
Θ
mid
∈ [180
◦
,270
◦
]. The results also show that even
when Θ
mid
= 90
◦
(a setting that can be viewed as a
misconfiguration, given the sink position), the work-
ing of Method-1 and Method-2 have been able to ad-
just the angle α of each node and the obtained LBs
are comparable with the omnidirectional case. The
results also point to the importance of adjusting the
beam-width 2α based on the quality of the obtained
routes to the sink (as considered in Approach 2).
0.0 0.1 0.2 0.3 0.4 0.5
Node state probability
0.0
0.2
0.4
0.6
0.8
1.0
Exposure
Omni
Method-1
Method-2
(a) k
req
= 1 and Θ
mid
= 180
◦
0.0 0.1 0.2 0.3 0.4 0.5
Node state probability
0.0
0.2
0.4
0.6
0.8
1.0
Exposure
Omni
Method-1
Method-2
(b) k
req
= 3 and Θ
mid
= 180
◦
Figure 7: Exposure versus node state probability.
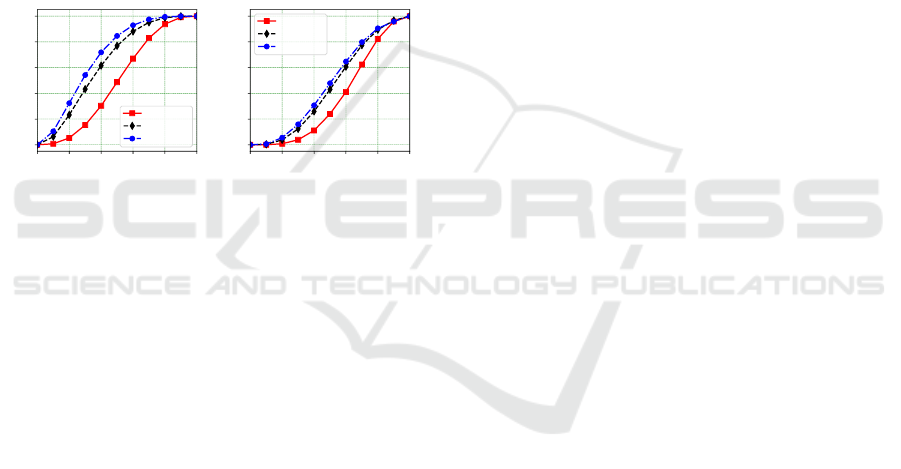
7.4 Exposure versus Node State
Probability
Here, we compare directional transmission with
omnidirectional transmission as we set p
f ull
(x) =
p
red
(x) = p for each node x, and vary p in the range
[0.0,0.5]. The probability p here can be viewed as the
node’s operating (either in the f ull or reduced sates)
probability. We note that low p values correspond to
cases where the fraction of time when nodes in the
network operate in the full or reduced energy states is
small. This can happen, e.g., because nodes can not
harvest enough energy, or nodes decide to conserve
power.
The experiments use a 6 × 6 x-grid with k
req
=
1 (Fig. 7a), and k
req
= 3 (Fig. 7b). In all cases,
for any value of p, directional transmission achieves
higher average LB on Expo(G, p) than omnidirec-
tional transmission. The results show the advantage
of utilizing and properly configuring directional EH-
WSNs. The curves also show that directional net-
works are capable of having an exposure reliability
that exceeds the operating probability of any single
node in the network.
8 CONCLUSIONS
In this paper, we consider a fundamental problem
on configuring the transmission beams of nodes in a
WSN that employs energy harvesting (EH) to achieve
prolonged operating time. We take the overall net-
work reliability for a path exposure problem as an ob-
jective function that we seek to maximize. The pro-
posed approaches have shown the advantages of using
directional transmission over omnidirectional trans-
mission. For future work, we propose investigating
the design of more comprehensive dynamic configu-
ration mechanisms of such networks for a variety of
WSN reliability problems.
REFERENCES
Adu-Manu, K., Adam, N., Tapparello, C., Ayatollahi, H.,
and Heinzelman, W. (2018). Energy-harvesting wire-
less sensor networks (EH-WSNs): A review. ACM
Transactions on Sensor Networks, 14:1–50.
Amac Guvensan, M. and Gokhan Yavuz, A. (2011). On
coverage issues in directional sensor networks: A sur-
vey. Ad Hoc Networks, 9(7):1238–1255.
Ball, M. O., Colbourn, C. J., and Provan, J. (1995). Network
reliability. In Ball, M. O., Magnanti, T. L., Monma,
C. L., and Nemhauser, G. L., editors, Handbook of
Operations Research: Network Models, pages 673–
762. Elsevier North-Holland.
Basabaa, A. and Elmallah, E. S. (2019). Bounds on path
exposure in energy harvesting wireless sensor net-
works. In 2019 IEEE Wireless Communications and
Networking Conference (WCNC).
Basabaa, A. and Elmallah, E. S. (2020). Bounding path ex-
posure in energy harvesting wireless sensor networks
using pathsets and cutsets. In The 45th IEEE Confer-
ence on Local Computer Networks (LCN).
Basabaa, A. and Elmallah, E. S. (2021). Upper bounds on
path exposure in EH-WSNs with variable transmis-
sion ranges. In The 46th IEEE Conference on Local
Computer Networks (LCN).
Clouqueur, T., Phipatanasuphorn, V., Ramanathan, P., and
Saluja, K. K. (2003). Sensor deployment strategy for
detection of targets traversing a region. Mobile Net-
works and Applications, 8:453–461.
Cormen, T., Leiserson, C., Rivest, R., and Stein, C. (2009).
Introduction to Algorithms. McGraw Hill, MIT Press,
third edition.
Duan, Z., Tao, L., and Zhang, X. (2019). Energy efficient
data collection and directional wireless power trans-
fer in rechargeable sensor networks. IEEE Access,
7:178466–178475.
Elmorsy, M., Elmallah, E. S., and AboElFotoh, H. M.
(2013). On path exposure in probabilistic wireless
sensor networks. In The 38th IEEE Conference on
Local Computer Networks (LCN).
On Configuring Directional Transmission for Path Exposure Reliability in Energy Harvesting Wireless Sensor Networks
69

Jakobsen, M. K., Madsen, J., and Hansen, M. R. (2010).
DEHAR: A distributed energy harvesting aware rout-
ing algorithm for ad-hoc multi-hop wireless sensor
networks. In 2010 IEEE International Symposium on
”A World of Wireless, Mobile and Multimedia Net-
works” (WoWMoM), pages 1–9.
Li, W., Gao, H., Liu, Y., Jia, B., and Huang, B. (2020). A
priority task scheduling algorithm based on residual
energy in EH-WSNs. In 2020 16th International Con-
ference on Mobility, Sensing and Networking (MSN),
pages 43–48.
Liu, L., Zhang, X., and Ma, H. (2009). Minimal exposure
path algorithms for directional sensor networks. In
GLOBECOM 2009 - 2009 IEEE Global Telecommu-
nications Conference, pages 1–6.
Mart
´
ınez, G., Li, S., and Zhou, C. (2014). Wastage-
aware routing in energy-harvesting wireless sensor
networks. IEEE Sensors Journal, 14:2967–2974.
Megerian, S., Koushanfar, F., Qu, G., Veltri, G., and
Potkonjak, M. (2002). Exposure in wireless sensor
networks: theory and practical solutions. Wireless
Network, 8:443–454.
Peng, S. and Low, C. P. (2013). Energy neutral routing for
energy harvesting wireless sensor networks. In 2013
IEEE Wireless Communications and Networking Con-
ference (WCNC), pages 2063–2067.
Peng, S., Wang, T., and Low, C. P. (2015). Energy neu-
tral clustering for energy harvesting wireless sensors
networks. Ad Hoc Networks, 18:1 – 16.
Sudevalayam, S. and Kulkarni, P. (2011). Energy harvesting
sensor nodes: Survey and implications. IEEE Com-
munications Surveys Tutorials, 13(3):443–461.
Tao, D. and Wu, T.-Y. (2015). A survey on barrier coverage
problem in directional sensor networks. IEEE Sensors
Journal, 15(2):876–885.
Zhang, L., Tang, J., and Zhang, W. (2009). Strong barrier
coverage with directional sensors. In GLOBECOM
2009 - 2009 IEEE Global Telecommunications Con-
ference, pages 1–6.
Zhu, X., Li, J., Zhou, M., and Chen, X. (2019). Optimal de-
ployment of energy-harvesting directional sensor net-
works for target coverage. IEEE Systems Journal,
13(1):377–388.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
70
