
Incremental Scheduling of the Time-triggered Traffic on TTEthernet
Network
Zden
ˇ
ek Hanz
´
alek
a
and Jan Dvo
ˇ
r
´
ak
b
CIIRC, Czech Technical University in Prague, Jugoslavskych partyzanu 1580/3, Prague, Czech Republic
Keywords:
Scheduling, Ethernet, Time-triggered.
Abstract:
Complex systems are often developed incrementally when subsequent models must be backward compatible
with the original ones. The need to exchange high-volume data, for example, multimedia streams in the avionic
systems, together with safety-critical data, puts demands on both the high bandwidth and the deterministic
behavior of the communication. TTEthernet is an Ethernet based protocol that enables the transmission of
the time-triggered messages. Thus, synthesizing a good schedule that meets all the deadline requirements and
preserves the backward compatibility with the schedules of preceding models is essential for the performance
of the whole system. In this paper, we study the problem of designing periodic communication schedules
for time-triggered traffic. The aim is to maximize the uninterrupted gap for the remaining non-deadline-
constrained traffic. The provided scheduling algorithm, based on MILP and CP formulation, can obtain good
schedules in a reasonable time while preserving the backward compatibility. The experimental results show
that the time demands of the algorithm grows exponentially with the number of messages to be transmitted,
but, even for industrial-sized instances with more than 2000 messages, the algorithm is able to return the close
optimal schedules in the order of hundreds of seconds.
1 INTRODUCTION
The development process in many industrial fields,
e.g., automotive or avionics, is based on incremen-
tal steps where new models are an evolution of the
previous ones. This incremental process enables the
cost-efficient development for companies and reduces
the test effort. Moreover, the customer is guaran-
teed that the new model is an upgraded version of
the model that he or she is comfortable with. These
benefits are a side effect of the backward compatibil-
ity that should be assured among incremental devel-
opment steps. Backward compatibility affects exter-
nal systems, e.g., human-machine interface, as well
as internal ones such as the communication subsys-
tem. The backward compatibility in communication
subsystems significantly reduces the costs spent on
debugging, testing, and maintenance as newly devel-
oped Electronic Control Units (ECUs) and diagnos-
tic tools can follow the agreement on the sharing of
communication resources achieved in previous devel-
opment steps.
The incremental development process is already
a
https://orcid.org/0000-0002-8135-1296
b
https://orcid.org/0000-0002-7004-9358
ingrained in the industrial practice. However, there
is an ongoing effort to develop and produce new
models even more cost-efficiently. One possibility
on how to reduce production costs in complex inter-
connected systems is to combine safety-related com-
munication together with non-critical communication
into one common medium (Li et al., 2019). Safety-
related communication requires determinism, while
non-critical communication demands a huge band-
width without hard timing constraints. In the past,
these two communication flows were conducted sep-
arately, as there were no communication protocols
that could handle the requirements of both. However,
modern protocols, like TTEthernet (commercial name
stands for Time-Triggered Ethernet), were developed
to bear such a difficult task.
In TTEthernet, safety-related communication is
exchanged based on a periodic time-triggered com-
munication schedule, while non-critical communica-
tion fills the empty gaps in the schedule. Such a com-
munication schedule has to be designed in a way that
all the deadline requirements are met to enable the re-
liable and deterministic operation of the application.
The creation of the schedule involves additional com-
plexity compared to the bus or passive star topolo-
302
Hanzálek, Z. and Dvo
ˇ
rák, J.
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network.
DOI: 10.5220/0010953700003117
In Proceedings of the 11th International Conference on Operations Research and Enterprise Systems (ICORES 2022), pages 302-313
ISBN: 978-989-758-548-7; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

s
l
q
u
r
t
k
l,m
k
m,o
k
o,p
k
p,q
k
p,u
k
o,n
k
n,r
k
n,m
k
t,m
k
n,s
1
2
3
4
1
2
3
4
1
2
3
4
1
2
3
4
m
n
o
p
k
m,t
k
m,l
k
o,m
k
m,n
k
s,n
k
n,o
k
r,n
k
p,o
k
u,p
k
q,p
Figure 1: An example of the TTEthernet network topology
with the routing and scheduling of message m
1
from node l
to node q.
gies of networks like FlexRay (International Organi-
zation for Standardization, 2015; Dvorak and Han-
zalek, 2016) or CAN (Waszniowski et al., 2009) be-
cause TTEthernet supports complex switched topolo-
gies (Tuohy et al., 2015). These aspects, together with
the real case problem proposed by our avionics in-
dustry partner, have motivated us to face the prob-
lem of scheduling time-triggered communication on
the TTEthernet network while keeping the incremen-
tal development process in mind.
The paper presents the algorithm for creating
schedules for time-triggered traffic on the TTEther-
net network while maximizing the minimal guaran-
teed continuous gap for the traffic with lower critical-
ity. The study aims to develop the periodic scheduling
algorithm, which preserves the backward compatibil-
ity with the original schedule. Finally, the influence
of the backward compatibility on the communication
schedule is analyzed.
1.1 TTEthernet Overview
TTEthernet is an extension of Ethernet for determinis-
tic communication developed as a joint project among
the Vienna University of Technology (Kopetz et al.,
2005), TTTech, and Honeywell, and standardized as
SAE AS 6802 (SAE International, 2011) in 2011. It
operates at Level 2 of the ISO/OSI model, above the
physical layer of Ethernet. It requires a switched net-
work with full-duplex physical links, such as Auto-
motive Ethernet standard 1000BASE-T1. An exam-
ple of the TTEthernet topology is depicted in Fig. 1.
The global time in the system is assured by the
clock synchronization protocol, where the clocks of
all the interconnected ECUs are being synchronized
periodically. Every synchronization period is called
an integration cycle.
TT
1
TT
1
TT
3
TT
3
TT
4
TT
4
TT
2
RC1
RC2
RC2
RC3
ic
1
ic
2
ic
3
ic
4
Integration cycles
time [ms]
5
10
15
20
25
30
35
40
Part of the integration cycle
used by TT communication
minimal
guaranteed gap
Figure 2: The example of the communication on a link in
one cluster cycle.
The traffic with various time-criticality is inte-
grated into one physical network. There are three traf-
fic classes in TTEthernet. These classes, ordered by
decreasing priority, are Time-Triggered (TT), Rate-
Constrained (RC) and Best-Effort (BE) traffic.
The TT traffic class has the highest priority. A
jitter shorter than µs can be achieved on a physical
layer (the physical layer jitter also depends on the
connected network devices). The TT messages are
periodic. We assume that they are strictly periodic
(i.e., no jitter in application level is allowed) in agree-
ment with (Tamas-Selicean et al., 2015b). The least
common multiple of their period is called the cluster
cycle.
For traffic with less strict timing requirements,
the RC traffic class can be used. This traffic class
conforms to the ARINC 664p7 specification (ARINC
(Aeronautical Radio, Inc.), 2009), also called AFDX.
The RC traffic represents event-triggered communi-
cation, which does not follow any schedule known in
advance.
A simple example of the TT traffic, together with
the RC traffic on one direction of a physical link, is
presented in Fig. 2. In the figure, the particular inte-
gration cycles are situated in rows, and the horizontal
axis represents the time instants in the particular inte-
gration cycle. The length of the cluster cycle (40 ms)
is equal to four times the length of the integration cy-
cle (10 ms) here. The figure shows that messages T T
1
,
T T
3
and T T
4
have the same period (twice the duration
of the integration cycle - i.e., 20 ms) and T T
2
has a pe-
riod equal to four times the integration cycle length.
The dark message at the beginning of each integration
cycle is the synchronization message.
Standard Ethernet traffic can be transmitted
through the network too. Such traffic is called the
Best-Effort (BE) traffic and has the lowest priority.
When the TT traffic is used together with other
traffic classes, a TT message could be delayed by an-
other RC or BE message. The delay happens when
a TT message arrives while an RC or BE message is
in transmission. The Timely block integration pol-
icy, which causes no extra delay of the TT traffic, is
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network
303

used in this paper. In this case, an RC or BE mes-
sage can only be transmitted if there is enough time
for the transmission of the entire message before the
next TT message is scheduled. If there is insufficient
time, the transmission of the RC or BE message is
postponed until after the TT message is transmitted.
It additionally means that the TT traffic follows the
schedule without any delays.
1.2 Related Works
The area of time-triggered communication schedul-
ing on Ethernet-based networks has already been ex-
amined in many publications. Steiner (Steiner, 2010)
was among the first to study the problem. They de-
scribed the basic constraints for scheduling the com-
munication in the TTEthernet network and provided
the Satisfiability Modulo Theories (SMT) formula-
tion that was able to find a feasible schedule for small
instances with up to 100 messages. The concept of
schedule porosity was introduced in (Steiner, 2011).
The porosity (the allocated blank slots for RC mes-
sages spread over the integration cycle) is introduced
to the schedule to decrease the delay posed on RC
traffic by TT traffic. To evaluate the impact of the
porosity on the RC traffic, Steiner et al. provided a
pessimistic worst-case delay calculation, which was
consequently tightened by a new method in (Tamas-
Selicean et al., 2015b). A more detailed study of
the impact of the time-triggered schedule on the RC
communication has been presented in (Boyer et al.,
2016). In (Tamas-Selicean et al., 2015a), the au-
thors employed the TabuSearch algorithm to over-
come the scalability problem of previous SMT for-
mulations. As noted by (Steiner et al., 2015), poros-
ity scheduling has a disadvantage that gaps introduced
at the beginning of the scheduling process do not
consider the profile of the RC traffic. The concept
of porosity is also weak in the case of scheduling
TT messages with short periods. Wang et al. (Wang
et al., 2018) used back-to-back schedule optimization,
which aims to minimize the standard deviation of the
messages offset in the integration cycle (hence, cre-
ate as compact schedule as possible), to overcome
the weakness of the porosity approach. The con-
cept of minimization of the TT communication block
length, called makespan minimization, was presented
in (Dvo
ˇ
r
´
ak et al., 2017). The paper formulates the
scheduling problem as an RCPSP model to solve the
problem efficiently. However, the method did not al-
low one to preserve the backward compatibility, and
the quality of the resulting schedule was limited by
the use of naive shortest-path-tree routing algorithm.
Pozo et al. in (Pozo et al., 2019) used a divide-and-
conquer method to overcome the scheduling scalabil-
ity limitations in large-scale hybrid networks consid-
ered to be used in, for example, smart cities in the
future.
Based on the given TTEthernet communication
schedule, Craciunas et al. scheduled the tasks on the
communication endpoints in (Craciunas et al., 2014).
Several authors presented a holistic scheduling algo-
rithm that makes schedules of communications and
computations together (Craciunas and Oliver, 2016;
Minaeva et al., 2018).
The closely related problem to TTEthernet
scheduling is the scheduling of TT communication for
IEEE 802.1Qbv, which is the standard of the IEEE
Time-Sensitive Networking group (see discussion in
(Moutinho et al., 2019)). Craciunas et al. derived the
scheduling constraints for the TT communication on
IEEE 802.1Qbv in (Craciunas et al., 2016) and pro-
vided an SMT model that aims to minimize the num-
ber of queues needed to schedule a given set of mes-
sages. Even though the TTEthernet and 802.1Qbv
shares many features, the queues with a limited num-
ber of priorities used in 802.1Qbv introduces changes
to the problem statement (Vlk et al., 2022).
All the published papers aim to create schedules
from scratch, and none of them considers backward
compatibility with the preceding systems, which lim-
its the use of the proposed method in industries with
an incremental development process.
1.3 Paper Outline
The main contributions of this paper are:
1. The formal description of the incremental TTEth-
ernet scheduling problem with deadline con-
straints.
2. The three-stage heuristic algorithm, which in-
cludes
• the routing algorithm that balances the commu-
nication load among the links
• the message-to-integration-cycle assignment
algorithm that balances the communication
load among the integration cycles
• the message scheduling method based on the
constraint programming model of the problem
3. An examination and discussion of the impact of
the incremental aspect on TTEthernet scheduling.
4. An evaluation of the proposed algorithm from
quality and performance point of view.
The paper is organized as follows: Section 2 de-
scribes the studied problem of the incremental TT
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
304

message scheduling in the TTEthernet network com-
prehensively. In Section 3, the proposed method of
the schedule creation is described consisting of a mes-
sage routing method, a load-balancing heuristic, and
a CP based formulation of the scheduling problem.
The method and the impact of the backward compat-
ibility on the scheduling are evaluated and discussed
in Section 4. Section 5 concludes the paper.
2 PROBLEM STATEMENT
This paper aims to design a method for finding feasi-
ble strictly periodic schedules for time-triggered com-
munication on the TTEthernet network so that the
maximal part of the remaining bandwidth can be pre-
served for the RC and BE messages, the timing con-
straints are satisfied, and the backward compatibility
with the original schedule is preserved. All aspects of
the tackled problem are described in this section.
2.1 Messages
Each message m
i
from a set of the TT messages M
that is to be scheduled has the following parameters:
• t
i
- period
• c
i
- message length in the number of bits consist-
ing of a payload, headers and interframe gap
• d
i
- deadline
• r
i
- release date
• q
i
- identifier of the transmitting node
• Q
i
- set of the receiving node identifiers (the set
contains only one receiving node in the case of a
unicast message)
The message period t
i
is assumed to be an integer
multiple of the length of the integration cycle ic. The
length of the resulting schedule is determined by the
length of the cluster cycle cc. The cluster cycle con-
sists of set of the integration cycles I. The transmis-
sion time of message m
i
has to be smaller than or
equal to the duration of the integration cycle (it would
not be possible to send a synchronization message
otherwise), and its length c
i
does not exceed the max-
imal Ethernet frame length of 1530 bytes. Deadline
d
i
and release date r
i
are assumed to have the value in
the range 0 ≤ r
i
≤ d
i
≤ t
i
.
2.2 Network Topology
The TTEthernet topology consists of nodes and links
which interconnect them. The nodes e
i
∈ E are
divided into two classes: redistribution nodes E
R
k
l,m
k
m,o
1
2
3
4
1
2
3
4
k
m,l
k
o,m
m
1
m
1
m
1
m
1
the same
message occurrence
the same
message instance
l
m
o
Figure 3: Visualization of the difference between message
occurrence and message instance.
and communication endpoints E
C
. The communica-
tion endpoints are nodes that generate or process the
data (e.g., sensors, actuators, control units, and other
ECUs). Thus, only the identifier of a communication
endpoint can be assigned to message m
i
as transmitter
q
i
or one of the receivers from set Q
i
. The redistribu-
tion nodes, on the other side, are switches without any
of their own data to transmit and serve as intermediary
nodes for the communication. In Fig. 1, the commu-
nication endpoints are titled by ”ECU”, and the re-
distribution nodes have arrows drawn on the top side.
The front side of each node is labeled by its name.
Each hop in the network introduces a technical de-
lay caused by queuing in the ingress and egress port.
Such a delay in a switch is represented by parame-
ter τ for the TT messages. The value of τ can be in
the range from 1 µs to 2.4 µs according to the network
configuration (Steinbach et al., 2010).
Each link k
i, j
from a set of links K connects two
nodes e
i
and e
j
. This connection covers just one di-
rection of the full-duplex communication. Therefore,
two links k
i, j
and k
j,i
model one full-duplex physical
link between nodes e
i
and e
j
. These two links are
two independent resources from the scheduling point
of view. The instance of message m
i
in link k
l,m
is
called a message instance m
l,m
i
. The set of all the
message instances is denoted by MI. All the transmis-
sions of some message m
i
in one particular link repre-
sent the same message instance. The message occur-
rence, on the other hand, represents all the transmis-
sions of some message m
i
in one particular integration
cycle. The difference between the message instance
and the message occurrence is graphically explained
in Fig. 3. The figure shows the detailed view on the
sub-segment of the network topology from Fig. 1 with
node e
l
, e
m
and e
o
only. Both links of any physical
link are labeled here already.
2.3 Message Routing
A sequence of the links S
q
i
= (k
l,m
,k
m,o
,...,k
p,q
) repre-
sents the routing path of message m
i
from transmitter
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network
305

q
i
= e
l
to receiver e
q
∈ Q
i
through the redistribution
nodes e
m
,...,e
p
. The union of all the routing paths
∪S
q
i
|∀q ∈ Q
i
for a given message m
i
determines the
routing tree S
i
. For example, the transmission of mes-
sage m
1
through routing path S
q
1
is presented in Fig. 1.
Only one direction of each physical link is labeled in
the figure for the sake of simplicity. The routing paths
S
q
i
are not known in advance. Therefore, finding the
appropriate routing trees is part of the optimization
process.
2.4 Original Schedule
Additionally, the original schedule is given for the in-
cremental scheduling. The original schedule defines
the start time of transmissions for the message in-
stances ˜m
k,l
i
from the subset of the message instances
f
MI ⊂ MI which are already present in the original
schedule. The original schedule can be determined
for a subset of messages as well as for a subset of its
message instances. This representation of the origi-
nal schedule even allows the extension of the topol-
ogy as well as the extension of the set of receivers for
the already present messages. More precisely, all the
modifications of the topology and message set that do
not force the backward compatibility to be broken are
allowed in the incremental development process.
2.5 Schedule
The schedule is so-called strictly periodic, which
means that the next message occurrence of message
m
i
in a particular link appears in the schedule exactly
t
i
time units after the current one. Therefore, the po-
sitions of all the message occurrences of message m
i
in the strictly periodic schedule can be deduced from
the position of the first message occurrence and its
periodicity.
A feasible schedule has to fulfill the following
hard constraints:
Completeness Constraint: Each message m
i
∈ M
has to be scheduled.
Contention-free Constraint: Any link is capable of
transferring at most one message at a time.
Timing Constraint: Each message has to be trans-
mitted after its release date and received by all the
receivers before its deadline.
Transmission Compactness Constraint: The mes-
sage transition from transmitting node q
i
to all the
receivers from Q
i
has to be accomplished in one in-
tegration cycle.
Backward Compatibility Constraint: The start of
transmission time must be preserved for all the mes-
sage instances participating in the original schedule.
Precedence Constraint: Message m
i
has to be sched-
uled in link k
m,o
at least τ time units after it is sched-
uled in k
l,m
if k
l,m
precedes k
m,o
in S
q
i
.
2.6 Objective
The coherent TT traffic segment should be com-
pressed as much as possible to preserve the maxi-
mum part of the remaining bandwidth for the RC and
BE traffic. This idea follows the practice from the
FlexRay bus or Profinet, where the dedicated commu-
nication segment is allocated for the TT traffic. The
TT traffic can be scheduled at the beginning of the in-
tegration cycle, and the remaining coherent gap in the
integration cycle without the TT traffic is preserved
for the RC and BE traffic. The gap, which is the short-
est among all the links, is denoted as a minimal guar-
anteed gap (see Fig. 2). Considering the constraints
and aspects above, the goal of the scheduling is to find
a feasible schedule for the TT messages, which max-
imizes the minimal guaranteed gap.
3 ALGORITHM
The described problem is extensively complex as
it involves scheduling together with routing. The
algorithm that would solve the whole problem at
once would put extreme demands on the computa-
tional resources or time needed to find the solution.
Thus, the incremental scheduling problem proposed
in the paper is decomposed into three subproblems
to tackle the computational effort. The solution of
each subproblem fixes some decisions for the sub-
sequent problem. Hence, the incremental schedul-
ing algorithm can be considered as being divided into
three stages. In the first stage (Sec. 3.1), the routing
of the messages is established. In the second stage
(Sec. 3.2), the algorithm finds the assignment of the
messages to the particular integration cycles. The
transmission times for each message in each link are
decided in the last stage (Sec. 3.3).
3.1 Messages Routing Problem
The network topology is often a tree in industrial net-
works. It means that there are no cycles and, there-
fore, only one possible path from a communication
endpoint to any other endpoint exists. Thus, the deter-
mination of the routing is trivial in such a case. How-
ever, the TTEthernet does not restrict the network
topology to the tree. The cycles introduce new redun-
dant paths for messages that can serve as a backup
during a partial network malfunction. Moreover, the
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
306

appropriate selection of the routing path of the mes-
sage can balance the load among the network. Thus,
redundant paths can remove the bottleneck of the tree
topology. However, the TT messages have to know
which path they are routed through in advance.
min F
s.t. f
l,m
≤ F ∀k
l,m
∈ K
∑
i
c
l,m
i
·
cc
t
i
· x
i,l,m
= f
l,m
∀k
l,m
∈ K
∑
l
x
i,l,m
= 1 ∀m
i
∈ M; ∀m ∈ Q
i
∑
m
x
i,l,m
≥ 1 ∀m
i
∈ M; l = q
i
∑
l
x
i,l,m
≤
∑
k
x
i,m,k
∀m
i
∈ M; ∀m ∈ E
R
∑
l
x
i,l,m
≤ 1 ∀m
i
∈ M; ∀m ∈ E
R
∑
l
x
i,l,m
≥
∑
k
x
i,m,k
deg
−
(m)
∀m
i
∈ M; ∀m ∈ E
R
s
i,m
≥ 1 + s
i,l
− B + Bx
i,l,m
∀m
i
∈ M; ∀k
l,m
∈ K
s
i,m
≤ 1 + s
i,l
+ B − Bx
i,l,m
∀m
i
∈ M; ∀k
l,m
∈ K
s
i,l
= 0 ∀m
i
∈ M; l = q
i
x
i,l,m
= 1 ∀m
l,m
i
∈
f
MI
x
i,l,m
∈ {0,1} ∀m
i
∈ M; ∀l,m ∈ E
f
l,m
∈ Z
+
0
∀l, m ∈ E
F ∈ R
s
i,l
∈ Z
+
0
∀m
i
∈ M; ∀l ∈ E
(1)
Therefore, the first stage of the algorithm finds the
routing. In accordance with the claim above, the al-
gorithm aims to find such a routing that the network
load is as balanced among the links as possible. The
balanced network gives a good premise that the result-
ing communication schedules will be shorter than in
the case of an unbalanced network. Thus, this routing
objective corresponds to the aims of the scheduling
algorithm.
An MILP model is used to solve the routing sub-
problem and decide routing tree S
i
for each message.
The binary variable x
i,l,m
decides whether the mes-
sage m
i
is routed through the link k
l,m
, and variable
f
i,m
represents the load of the link k
l,m
. The real vari-
able F is, consequently, the load of the busiest link.
The auxiliary variable s
i,l
assigns a numerical label to
each node e
l
for each message m
i
. The label deter-
mines the depth of the node e
l
in the routing tree S
i
.
The artificial constant B represents any number that is
bigger than the maximal depth (max s
i,l
). Parameter
c
l,m
i
represents the transmission time of message m
i
in
link l
l,m
. Note, that if the links are configured to have
a different bandwidth, then the transmission time of
the same message varies among the links.
The objective of the MILP model minimizes the
load of the busiest link. The first constraint, together
with the objective, ensures that the value of F equals
the load of the busiest link. The second constraint cal-
culats the load f
l,m
for each link. The third and fourth
constraints force the routing path for each message to
also contain the receiving nodes and the transmitting
node. The fifth, sixth, and seventh constraint assure
that the redistribution nodes serve as the inner nodes
of the routing tree. The eighth, ninth and tenth con-
straints guarantee the routing tree of any message not
to contain the cycle. B represents any constant that is
larger than the number of nodes in the topology here.
Its aim is to make the model ignore the constraints
if the value of x
i,l,m
is equal to zero. The eleventh
constraint forces the resulting routing to satisfy the
backward compatibility.
The routing tree S
i
defines the set of links in which
the message is to be scheduled and specifies the prece-
dence relations among the message instances.
3.2 Integration Cycle Assignment
Problem
To distribute the messages among the integration
cycles, we used an idea from the multiprocessor
scheduling area. In the area, if all the workload of the
tasks is distributed among the processors evenly, then
the part of the integration cycle used by the TT com-
munication has a good chance to be minimal. Follow-
ing that, the algorithm tries to distribute the messages
among the integration cycles evenly. All the prece-
dence constraints, the time lags imposed by the switch
delay τ, and the deadline constraints are relaxed here.
The integration cycle assignment problem is formu-
lated as the following MILP model 2.
The binary variable a
i, j
= 1 iff message m
i
is as-
signed to the integration cycle j ∈ {0 ...t
i
}. Simi-
larly, the binary parameter ˜a
i, j
= 1 iff message m
i
was scheduled to the integration cycle j ∈ {0 ...t
i
}
in the original schedule. The first constraint assures
that the first message occurrence appears in exactly
one of the possible integration cycles. Thus, it sat-
isfies the completeness constraint. The second con-
straint makes the variable z have the value equal to
or greater than the time needed to exchange all the
messages in any integration cycle of any link in the
network. The constraint is evaluated for each link and
each integration cycle in the cluster cycle so that the
transmission times of all the message occurrences as-
signed to the particular integration cycle in the given
link are summed up. The resulting total time must be
less than or equal to variable z. The aim of the MILP
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network
307

model is to find such an assignment that minimizes
z. Thus, the maximal time needed for the message
exchange among all the resources is minimized. The
third and fourth constraint force the messages to be
assigned to the integration cycle, which can satisfy the
release date and deadline constraints. The last con-
straint forces the messages from the original schedule
to be assigned to the corresponding integration cycle
in the new schedule.
min
a
i, j
z
s.t.
∑
j
a
i, j
= 1 ∀i ∈ M
∑
m
i
∈k
l,m
c
l,m
i
· a
i, j mod t
i
≤ z ∀ j,l,m | j ∈ {0...
cc
ic
}
a
i, j
= 0 ∀i, j | d
i
< j · ic
a
i, j
= 0 ∀i, j | r
i
> (j + 1) · ic
a
i, j
= 1 ∀i, j | ˜a
i, j
= 1
a
i, j
∈ {0,1}; z ∈ R ∀i, j
(2)
The resulting assignment balances the load among the
integration cycles, follows the routing of the mes-
sages, and preserves the timing and backward com-
patibility constraints.
3.3 Link Schedules Creation Problem
The constraint programming model is employed to
create the resulting schedule. For the description of
the model, the IBM CP Optimizer formalism (La-
borie, 2017) will be used. The CP model is based on
so-called interval variables which, in our case, repre-
sent each message instance m
l,k
i
⊂ MI in the schedule.
The set of message instances to be scheduled on a par-
ticular link is known since the routing of the messages
has been already decided. For each interval variable,
the solver decides its start time. In the model, the
time is considered as a relative offset to the start time
of the integration cycle. Thus, two message instances
that are scheduled with the same offset in the integra-
tion cycle, but with a different integration cycle are
considered as being scheduled at the same time.
The objective of the scheduling is to minimize the
part of the integration cycle used by the TT commu-
nication:
minmax
i,l,m
endOf(m
l,m
i
)
The length of the message is preserved by:
lengthOf(m
l,m
i
) = c
l,m
i
|∀i ∈ M; l,m ∈ E
Further constraints have to be introduced to satisfy
the timing constraints. Due to the known message in-
stance to the integration cycle assignment, the release
date ˆr
i
and deadline
ˆ
d
i
relative to the integration cycle
in which message m
i
is transmitted are also known.
Thus, the timing constraints can be defined as the start
time limitation of the related interval variable:
startMin(m
l,m
i
) = ˆr
i
|∀m
l,m
i
∈ MI
endMax(m
l,m
i
) =
ˆ
d
i
|∀m
l,m
i
∈ MI
Similarly, the backward compatibility is assured to
be satisfied by:
startOf(m
l,m
i
) = startOf( ˜m
l,m
i
) | ∀m
l,m
i
∈
f
MI
where startOf( ˜m
l,m
i
) denotes the offset of the message
instance in the original schedule.
The contention-free constraint is necessary to be
satisfied next. From the model point of view it means
that no two message instances, which appear in the
same integration cycle and on the common link, can
overlap. As the assignment of the message instances
to the links (routing) and integration cycles is already
decided, it can be trivially deduced in which link and
integration cycle message m
i
appears. Let us denote
MI
l,m
i
the set of message instances which appear in
the same integration cycle ic
i
and link k
l,m
. Now, the
contention-free constraint is stated as:
noOverlap(MI
l,m
i
) | ∀i ∈ I;l,m ∈ K
where noOverlap is a CP operator that keeps all the
interval variables in the given set to be scheduled in
distinct time intervals.
Finally, it is necessary to keep the precedences
among message instances. In this case, the prece-
dence constraints are given by the routing of the mes-
sage S
i
and by the technical delay caused by switch-
ing the logic in the redistribution nodes. Let P
l,m
i
be
the set of predecessors of the message instance m
l,m
i
in S
i
. The message instance m
k,l
i
is part of the P
l,m
i
if and only if x
i,k,l
= 1 (see the MILP model for the
routing). Consequently, the precedence constraint is
formulated as:
endBeforeStart(p,m
l,m
i
,τ) |∀p ∈ P
l,m
i
;∀i ∈ M; l,m ∈ K
With these constraints, the CP model for the message
scheduling is defined completely.
4 EXPERIMENTAL RESULTS
The proposed scheduling method was tested on a PC
with Intel
R
Core
TM
i7-4610M CPU (two cores with
3 GHz and hyper-threading) and 32 GB RAM. The
algorithm uses the Gurobi ILP Solver for determining
the messages routing and for solving the Integration
cycle assignment problem. The Link schedules cre-
ation problem was solved by the IBM CP Optimizer.
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
308
The time to solve a benchmark instance was limited
to 5 min.
The benchmark instances used in this study were
synthetically generated. The benchmark generator
defines the topology first. In this study, a random
graph topology is generally used. Consequently, the
message parameters are generated randomly, consid-
ering the imposed limitations. These imposed limita-
tions are described individually in detail for each test
in the following sections. Each message is assigned
to either the broadcast, multicast, or unicast group.
Finally, the set of receivers is generated for each mes-
sage according to the group.
The generation of the incremental scheduling
benchmark instances was performed in reversed or-
der, i.e., the benchmark instance for the last incremen-
tal iteration was generated first. Then the original in-
stances for the incremental scheduling are made. For
example, to generate an instance for the penultimate
incremental iteration, the last instance is taken, and
some of the messages, nodes, and links are removed
from the instance according to the given pruning ratio.
To provide statistically significant results, thirty
instances of each benchmark set were generated, and
the presented values represent the mean value from all
these instances.
4.1 Evaluation of the Routing
Algorithm
The proposed algorithm uses the message routing
that aims to support the scheduling objective by the
uniform scattering of the messages among the links.
Thus, it unloads the communication on the most
utilized links. To evaluate the algorithm’s perfor-
mance, the proposed routing method is compared to
the Shortest path tree (SPT) routing method. The
SPT routing method minimizes the number of hops
the message needs to take to get from the transmitter
to the receivers. It optimizes the overall bandwidth
utilized by the communication on the network, but it
does not prevent the bottlenecks caused by the indi-
vidual overutilized links.
The comparison of both methods is presented in
Fig. 4. For the evaluation, the complete scheduling al-
gorithm was executed while the MILP or SPT method
was used for the routing.
Benchmark sets with 200 TT messages generated
with periods in a range from one to three integration
cycles and with Ethernet frame lengths in full range
(i.e., up to 1500 bytes) were used to test the routing
algorithm. Fig. 4 presents how the method is able to
utilize the redundant links in the graph. The x-axis de-
notes the number of redundant links added to the tree
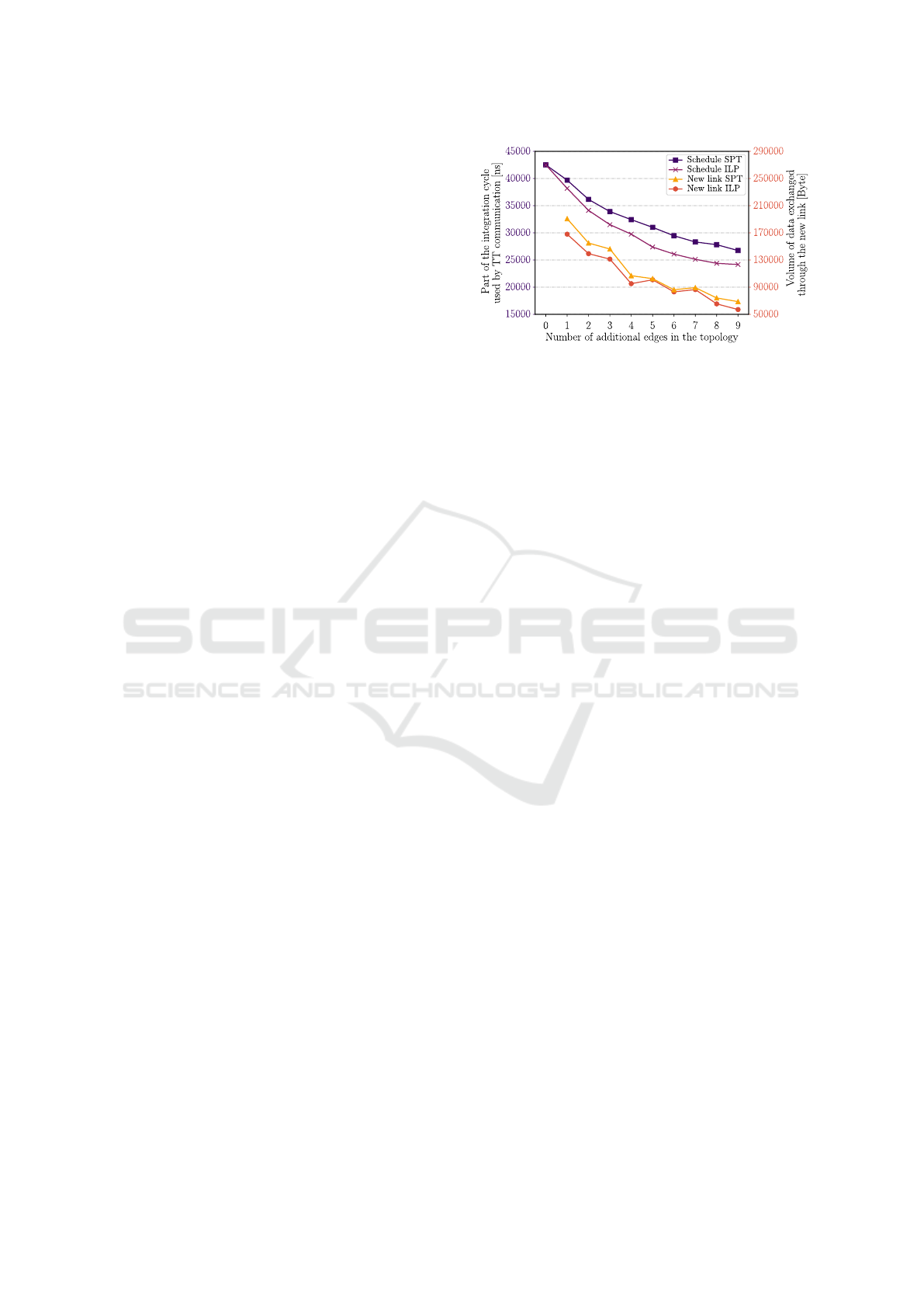
Figure 4: The evaluation of the routing quality.
topology. The left y-axis, related to the Schedule SPT
and Schedule ILP lines, represents the duration of the
part of the integration cycle used for the TT communi-
cation and the right y-axis, related to the New link ILP
and New link SPT line, represents the volume of the
data exchanged through the newly introduced links.
As can be observed from “Schedule SPT” and
“Schedule ILP” lines in Fig. 4, adding nine additional
edges to the tree topology can shorten the duration of
the part of the incremental cycle used by the TT com-
munication to almost 50%. However, the benefits of
the redundant links is that it can utilize the proposed
method based on the MILP model (labeled as “Sched-
ule ILP” in the figure) better than the method based on
the SPT algorithm. On the tree topology, both meth-
ods behave equally as the routing tree is already de-
cided by the topology. However, as the number of ad-
ditional links is increasing, the proposed method acts
significantly better than the SPT method.
The “New link” lines, on the other hand, shows
how the significance of the newly introduced links
evolves with the number of additional edges in the
topology. The routing algorithms are able to forward
through the last added message only about one-third
of the data volume compared to the data volume it was
able to forward through the first added link.
4.2 Impact of the Incremental
Scheduling on the Schedule
The backward compatibility constraint introduced to
the scheduling problem causes the overhead in the
resulting schedule. To measure the overhead of
the incremental scheduling over the non-incremental
scheduling, another experiment was performed. The
new set of benchmark instances was generated with
ten incremental iterations. In the case of the incre-
mental scheduling, the resulting schedule from the
previous iteration was used as the original sched-
ule. The first incremental scheduling iteration has an
empty original schedule. All the messages were gen-
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network
309
erated with a period in a range from one to three inte-
gration cycles and with Ethernet frame lengths in full
range. The last incremental iteration instances con-
tained 500 TT messages.
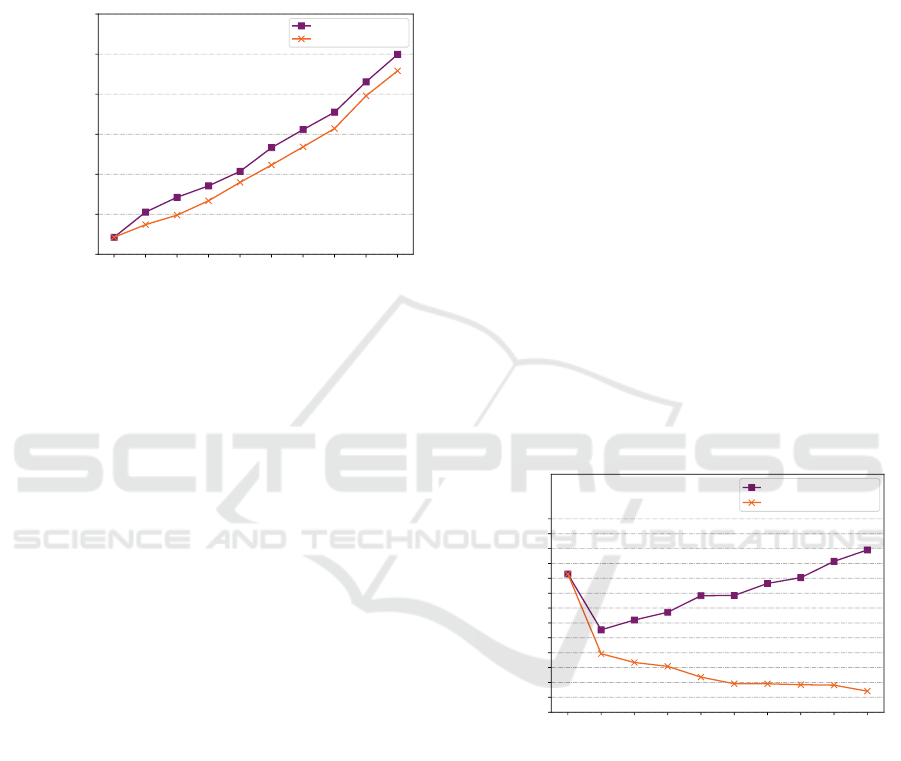
The results from the experiment are presented in
Fig. 5. The incremental scheduling iteration is sit-
1 2 3 4 5 6 7 8 9 10
Incremental scheduling iteration
200000
250000
300000
350000
400000
450000
500000
Part of the integration cycle
used by TT communication [ns]
Incremental
Non-incremental
Figure 5: The difference between the incremental and non-
incremental scheduling.
uated on the x-axis of the graph, and the schedule
duration of the part of the integration cycle used by
TT communication is on the y-axis. The dark purple
row represents the result from the algorithm where the
original schedule is considered, while the orange row
represents the results of the algorithm, assuming no
original schedule is given.
The result for the first incremental iteration is the
same for incremental and non-incremental scheduling
as no original schedule is used and, consequently, no
backward compatibility constraint is applied in both
cases. The most notable change in the difference be-
tween the incremental and non-incremental schedul-
ing is present in the second incremental iteration. The
prolongation caused by new messages in the case of
the incremental scheduling is almost twice as much
compared to the prolongation caused by the new mes-
sages in the case of the non-incremental scheduling.
This causes the fact that the messages that were al-
ready scheduled in the first incremental iteration can-
not be moved in the incremental scheduling. Thus,
the new messages cannot be incorporated in such an
efficient way as in the case of the non-incremental
scheduling. However, this overhead also introduces
a new porosity to the schedule. The further incremen-
tal scheduling iterations are able to use this porosity to
place the new signals into those gaps efficiently. That
is the reason why the overhead stays almost constant
in the future scheduling iterations, and the difference
between the incremental and non-incremental sched-
ule is almost the same as can be observed in the graph.
4.3 Evolution of the Schedule
Utilization Over Incremental
Iterations
To support the statement from the previous section,
the way how the utilization of the schedule evolves
with the incremental iterations has been studied more
deeply. For the purpose of this section, the utilization
of the schedule (or just utilization) is defined as the
portion of the part of the integration cycle used for
the TT communication that is utilized by the message
transmission averaged over all the integration cycles.
In other words, considering only the part of the in-
tegration cycle used by the TT communication, the
utilization represents the portion of the time when the
link is busy. In order to test the utilization, similar
benchmark instances were generated to the testing of
the impact of the incremental scheduling. The only
exception is the topology of the network. To avoid
the impact of the routing on the porosity test, the gen-
erated instances use a tree topology. Two different
measurements were performed.
Firstly, the average of the schedule utilization over
the whole network (all the links) has been measured.
The resulting graph can be seen in Fig. 6. The figure
1 2 3 4 5 6 7 8 9 10
Incremental scheduling iteration
23.0
23.5
24.0
24.5
25.0
25.5
26.0
26.5
27.0
27.5
28.0
28.5
29.0
29.5
Average link porosity
over whole network [%]
Untouched topology
Augmented topology
Figure 6: The average utilization of the communication over
the whole topology.
presents the evolution for two cases: the dark purple
line shows how the utilization evolves when the topol-
ogy is not extended during the incremental iterations;
the orange line shows the utilization evolution when
the topology grows together with the number of mes-
sages. The x-axis represents the incremental schedul-
ing iteration, and the y-axis represents the average
utilization of the schedule in percent. This unuti-
lized/free space can be used by the new messages in
the future incremental scheduling iteration that are lo-
cal (their transmitter and receivers are close to each
other according to the network topology). Note that
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
310
less than 30 % of the schedule is used according to the
graph. This small amount is caused by the tree topol-
ogy, where the links close to the leaves of the topology
are rarely used. The figure also shows that the overall
schedule utilization increases if there is no topology
extension which is caused by adding new messages to
the schedule and the significant part of them are lo-
cal messages (thus, the part of the integration cycle
used by the TT communication is not prolonged too
significantly). If the topology is extended, the new
sparse links introduce a lot of unutilized bandwidth to
the schedule, which causes a decrease in the overall
utilization.
Opposed to the new local messages that, as can be
observed from Fig. 6, can be easily incorporated into
the schedule without prolongation of the part of the
integration cycle used by TT communication because
of the low utilization of the links close to leaves, the
new messages that need to transit the root node could
cause the prolongation of the part easily. To study
how the schedule utilization can impact the schedul-
ing of these messages, the second measurement was
performed where the utilization was calculated only
on the most utilized link.
1 2 3 4 5 6 7 8 9 10
Incremental scheduling iteration
76
77
78
79
80
81
82
83
84
85
Utilization of the most utilized link [%]
Augmented topology
Untouched topology
Figure 7: The porosity of the most utilized link.
The utilization of the most utilized link is pre-
sented in Fig. 7. Here, the utilization is about 77
to 86 %, depending on the particular incremental
scheduling iteration. This makes it harder to incor-
porate the long-distance messages efficiently into the
schedule without prolongation of the part of the in-
tegration cycle used by the TT communication. The
figure also shows that there is no significant difference
for the long-distance messages, whether the topology
is extended (but no cycles introduced) or not as the
topology does not influence the flow of the messages
over the most utilized link.
These graphs also support the statement from the
last section as both the utilization metrics are the
worst in the first incremental scheduling iteration,
making the second scheduling iteration the most diffi-
cult. After that, the utilization metric changes slowly
and, thus, the difference between the efficiency of the
incremental and non-incremental scheduling is simi-
lar.
4.4 Evolution of the Scheduling
Objective Function in Time
It is necessary to note that the optimal solution for
the routing algorithm, together with the optimal solu-
tion for the link scheduling algorithm, does not ensure
the optimal solution from the problem statement point
of view. Thus, in practical cases, it is not needed to
wait until the link scheduling algorithm proves that
the current solution is optimal (or close to optimum
in the case of the 1 % tolerance), and the search can
be stopped sooner. This allows for creating sched-
ules for bigger industrial size instances in a reason-
able time. To show how the duration of the part of
the incremental cycle used by the TT communication
evolves in time, the same benchmark instance set with
2000 messages was used. The evolution of the dura-
tion of the part of the incremental cycle used by the
TT communication during the link schedule creation
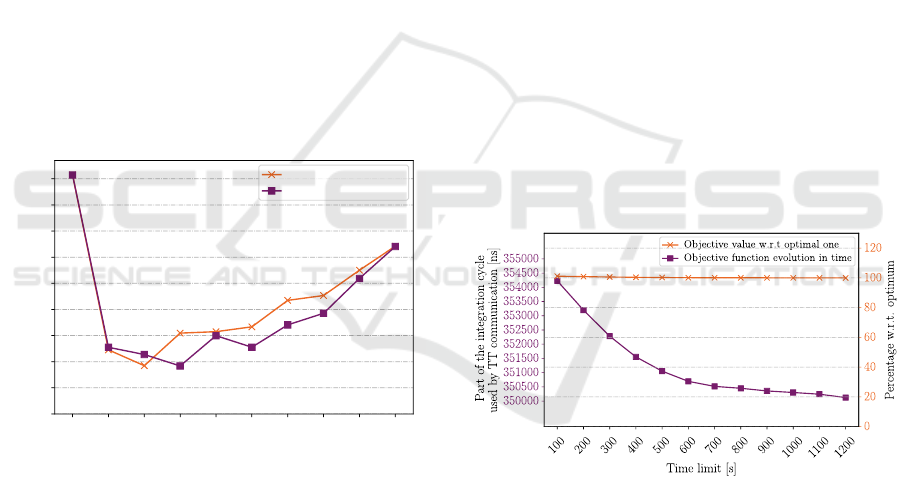
is presented in Fig. 8.
Figure 8: The evolution of the duration of the part of the in-
cremental cycle used by the TT communication in the time
domain.
The x-axis of the figure represents the time limit
for the scheduling. At the time of 1200 s, all the in-
stances in the set were solved to optimality. The left
y-axis represents the average duration of the part of
the integration cycle used by the TT communication
over the whole benchmark set. The left y-axis rep-
resents the ratio of the obtained objective value at a
particular time compared to the optimal one in per-
centage. Until time 100 s, the scheduling algorithm
was not able to find a feasible solution for two in-
stances out of thirty. At time 200 s, there was only
one instance without finding a feasible solution. In all
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network
311

further times, all the instances have found a solution.
The major change in the duration occurs in the be-
ginning, and the slope is decreasing in time. Even if
there is some improvement in the average duration of
the part of the integration cycle used by the TT com-
munication during the whole scheduling period, the
improvement between the average duration obtained
at time 100 s and 1200 s is less than 1.3 %. Thus, it
is sufficient to use a solution, which is not necessar-
ily optimal from the link schedules creation problem
point of view but obtained in a shorter time, in many
practical cases.
4.5 Scheduling of the Real Industrial
Instances
The work has been motivated by our industrial part-
ner, who develops electronic systems for the avionic
industry. This section describes the behavior of the
proposed algorithm on the real instance obtained from
the partner. The instance contains 1922 messages
(407 unicast messages and 1515 multicast messages)
with a payload of up to 1036 bytes and periods
from the set {12.5 ms, 25 ms, 50 ms, 100 ms, 200 ms,
1000 ms}. The system consists of 38 nodes. The
topology is based on three switches SW1, SW2 and
SW3 that are mutually interconnected. Each such
switch is in the topology twice called SW1 A and
SW1 B, and these two instances are interconnected
too. Thus, the backbone of the network is based on
such a double triangle topology. Each endpoint is
connected to one of those switches. The schedule
for this instance, which is optimal from all the sub-
problem’s point of view, was obtained after less than
250 s. The schedule utilization of the most utilized
link reached 96.3% while the schedule utilization av-
eraged over the whole network was only 19.6%. This
shows that the integration cycle assignment was able
to distribute the messages in the most utilized link
very efficiently. Figure 9 presents how the payload is
distributed among the links in the network. The links
are classified according to the volume of the TT data
transmitted through them per second. The first class
includes links with the volume from 0 to 0.1 MB/s, the
second one includes the links with the volume from
0.1 to 0.2 MB/s, etc. The y-axis then represents the
percentage of the links that belong to the particular
class. The histogram shows that almost 70 % of the
links have very low utilization of the links. About
50 % of these links are empty. That means that these
links are connected to the endpoints that serve as a
transmitter or a receiver (note that each transmission
direction of the Full-duplex physical link is repre-
sented by two separate links here). Moreover, there is
0.0
-
0.1
0.1
-
0.2
0.2
-
0.3
0.3
-
0.4
0.4
-
0.5
0.5
-
0.6
0.6
-
0.7
0.7
-
0.8
Bandwidth of links consumed by the TT traffic [MB/s]
0
10
20
30
40
50
60
70
Percent of links belonging to
the particular class [%]
65.22
18.12
6.52
3.62
4.35
0.72 0.72 0.72
Figure 9: The histogram of the links utilization.
just one link in the class with 0.7 - 0.8 MB/s. This link
(and also the links from classes with 0.5-0.6 MB/s and
0.6-0.7 MB/s) connects the redistribution node with
the communication endpoint. Thus, the routing al-
gorithm was not able to reroute some messages from
this link through another path to lighten the link. The
backbone links belong to the 0.2-0.3 MB/s and 0.3-
0.4 MB/s classes. The interesting observation is that,
considering the 100 MB/s TTEthernet network, the
TT communication utilizes less than 1 % of the band-
width in this instance. The rest of the bandwidth is
used for the RC and BE communication.
5 CONCLUSION
The pressure placed on, for example, the automotive
or avionics industries to verify and certify its sys-
tems on a component and system integration level
pushes system developers to use time-triggered traf-
fic for safety-related communication as its behavior is
deterministic.
We have followed the idea of separating the time-
triggered traffic and event-triggered traffic already
used in (Dvo
ˇ
r
´
ak et al., 2017), which was inspired by
the scheme of the FlexRay bus communication cycle.
The objective has been to maximize the minimal guar-
anteed coherent gap left in each integration cycle on
each link that can be continuously used by the Rate-
Constrained and Best-Effort traffic while keeping the
backward compatibility with the original schedules
created in the previous development iterations.
The experiments show that the incremental
scheduling on one side prolongs the part of the in-
tegration cycle used by the TT communication in the
order of a percent (in the experiments it was about
1 %), but it brings the advantage of backward com-
patibility. The experiments show that the method can
ICORES 2022 - 11th International Conference on Operations Research and Enterprise Systems
312

return good results even for industry sized instances
in a few minutes. The study of the scalability of the
algorithm dependent on the number of messages, their
length and periodicity is available from the authors of
this paper upon request.
ACKNOWLEDGEMENTS
This work was supported by the EU and the Min-
istry of Industry and Trade of the Czech Republic un-
der the Project OP PIK CZ.01.1.02/0.0/0.0/20 321/
0024399.
REFERENCES
ARINC (Aeronautical Radio, Inc.) (2009). ARINC 664P7:
Aircraft Data Network, Part 7, Avionics Full-Duplex
Switched Ethernet Network. Technical report.
Boyer, M., Daigmorte, H., Navet, N., and Migge, J.
(2016). Performance impact of the interactions be-
tween time-triggered and rate-constrained transmis-
sions in TTEthernet. In 8th European Congress on
Embedded Real Time Software and Syst., pages 159–
168, Toulouse.
Craciunas, S. S. and Oliver, R. S. (2016). Combined task-
and network-level scheduling for distributed time-
triggered systems. Real-Time Syst., 52(2):161–200.
Craciunas, S. S., Oliver, R. S., Chmel
´
ık, M., and Steiner, W.
(2016). Scheduling real-time communication in IEEE
802.1Qbv time sensitive networks. In RTNS, Brest.
Craciunas, S. S., Oliver, R. S., and Ecker, V. (2014). Opti-
mal static scheduling of real-time tasks on distributed
time-triggered networked systems. In ETFA, pages 1–
8, Barcelona, Spain.
Dvorak, J. and Hanzalek, Z. (2016). Using two indepen-
dent channels with gateway for flexray static segment
scheduling. IEEE Transactions on Industrial Infor-
matics, 12(5):1887–1895.
Dvo
ˇ
r
´
ak, J., Heller, M., and Hanz
´
alek, Z. (2017). Makespan
minimization of time-triggered traffic on a ttethernet
network. In WFCS, pages 1–10, Trondheim.
International Organization for Standardization (2015).
ISO 17458 - FlexRay communications system.
Kopetz, H., Ademaj, A., Grillinger, P., and Steinhammer,
K. (2005). The time-triggered ethernet (TTE) design.
In ISORC, pages 22–33. IEEE.
Laborie, P. (2017). A (Not So Short) Introduction to CP
Optimizer for Scheduling. In ICAPS.
Li, Z., Wan, H., Pang, Z., Chen, Q., Deng, Y., Zhao, X.,
Gao, Y., Song, X., and Gu, M. (2019). An enhanced
reconfiguration for deterministic transmission in time-
triggered networks. IEEE/ACM Transactions on Net-
working, 27(3):1124–1137.
Minaeva, A., Akesson, B., Hanzalek, Z., and Dasari, D.
(2018). Time-triggered co-scheduling of computation
and communication with jitter requirements. IEEE
Transactions on Computers, 67(1):115–129.
Moutinho, L., Pedreiras, P., and Almeida, L. (2019). A
real-time software defined networking framework for
next-generation industrial networks. IEEE Access,
7:164468–164479.
Pozo, F., Rodriguez-Navas, G., and Hansson, H.
(2019). Methods for large-scale time-triggered net-
work scheduling. Electronics, 8(7).
SAE International (2011). AS6802: Time-Triggered Ether-
net. Technical report, SAE International.
Steinbach, T., Korf, F., and Schmidt, T. C. (2010). Compar-
ing time-triggered Ethernet with FlexRay: An eval-
uation of competing approaches to real-time for in-
vehicle networks. In WFCS, pages 199–202, Nancy.
Steiner, W. (2010). An Evaluation of SMT-Based Schedule
Synthesis for Time-Triggered Multi-hop Networks. In
RTSS, pages 375–384, San Diego, CA, USA.
Steiner, W. (2011). Synthesis of static communication
schedules for mixed-criticality systems. In ISORCW,
pages 11–18, Newport Beach, CA, USA.
Steiner, W., Gutirrez, M., Matyas, Z., Pozo, F., and
Rodriguez-Navas, G. (2015). Current techniques,
trends and new horizons in avionics networks config-
uration. In DASC, pages 1–26, Prague.
Tamas-Selicean, D., Pop, P., and Steiner, W. (2015a).
Design optimization of TTEthernet-based distributed
real-time systems. Real-Time Syst., 51(1):1–35.
Tamas-Selicean, D., Pop, P., and Steiner, W. (2015b).
Timing Analysis of Rate Constrained Traffic for
the TTEthernet Communication Protocol. In 18th
IEEE Int. Symp. on Real-Time Distributed Computing,
pages 119–126, Auckland, New Zealand.
Tuohy, S., Glavin, M., Hughes, C., Jones, E., Trivedi, M.,
and Kilmartin, L. (2015). Intra-vehicle networks: A
review. IEEE Transactions on Intelligent Transporta-
tion Systems, 16(2):534–545.
Vlk, M., Brejchova, K., Hanzalek, Z., and Tang, S.
(2022). Large-scale periodic scheduling in time-
sensitive networks. Computers and Operations Re-
search, 137:105512.
Wang, J., Ding, P., Wang, Y., and Yan, G. (2018). Back-
to-back optimization of schedules for time-triggered
ethernet. In 37th Chinese Control Conference (CCC),
pages 6398–6403, Wuhan, China.
Waszniowski, L., Krakora, J., and Hanzalek, Z. (2009).
Case study on distributed and fault tolerant system
modeling based on timed automata. Journal of Sys-
tems and Software, 82(10):1678–1694. SI: YAU.
Incremental Scheduling of the Time-triggered Traffic on TTEthernet Network
313
