
Classification Rules Explain Machine Learning
Matteo Cristani
1 a
, Francesco Olvieri
2 b
, Tewabe Chekole Workneh
1 c
, Luca Pasetto
1 d
and Claudio Tomazzoli
3 e
1
Department of Computer Science, University of Verona, Italy
2
School of Computer Science, Griffith University, Brisbane, Australia
3
CITERA, University of Rome, Italy
Keywords:
Machine Learning, eXplainable AI, Approximation, Anytime Methods.
Abstract:
We introduce a general model for explainable Artificial Intelligence that identifies an explanation of a Machine
Learning method by classification rules. We define a notion of distance between two Machine Learning
methods, and provide a method that computes a set of classification rules that, in turn, approximates another
black box method to a given extent. We further build upon this method an anytime algorithm that returns the
best approximation it can compute within a given interval of time. This anytime method returns the minimum
and maximum difference in terms of approximation provided by the algorithm and uses it to determine whether
the obtained approximation is acceptable. We then illustrate the results of a few experiments on three different
datasets that show certain properties of the approximations that should be considered while modelling such
systems. On top of this, we design a methodology for constructing approximations for ML, that we compare
to the no-methods approach typically used in current studies on the explainable artificial intelligence topic.
1 INTRODUCTION
The reproduction of results obtained by up-to-date
methods of Machine Learning (ML) and Deep Learn-
ing (DL) approaches, in a fashion that could be un-
derstood by humans is one of the emerging topics in
recent Artificial Intelligence studies. The overall idea
of explainable Artificial Intelligence lies on the possi-
bility of doing what is devised above.
If we look at the concepts underlying this very no-
tion, we observe a relevant distance between how a
ML, and in specific case, a DL system executes the
classification and the natural way in which human be-
ings identify rules that execute similar analyses on the
same data. This discrepancy has been remarked in nu-
merous cases, and is one of the reasons why explain-
able artificial intelligence has emerged.
When looking at a set of data, we can regard them
as expression of implicit regularity, the discover of
a
https://orcid.org/0000-0001-5680-0080
b
https://orcid.org/0000-0003-0838-9850
c
https://orcid.org/0000-0001-5756-2651
d
https://orcid.org/0000-0003-1036-1718
e
https://orcid.org/0000-0003-2744-013X
which is indeed an intelligent process, and even a log-
ical base for an induction process to learn those regu-
larities. Given that we expect data to grow over time,
this process can be performed in two models:
• The data of a classification system have at least a
partition of human - made labels. Therefore there
is the so called ground truth: a training set and
a test /validation set can be determined, while we
always have an execution dataset. After a train-
ing and validation phase over the training and test
sets, an algorithm can try and predict the values
against the execution dataset by looking at two or
more observation instants. This method is based
on the existence of a ground truth, so we name this
grounded model.
• The data of a classification system do not have any
human - made labels. We need another classifica-
tion algorithm (maybe a previously evaluated one)
so that a performance comparison can be made
over the execution dataset by looking at two or
more observation instants. This method does not
provide ground to the conclusions it takes, it only
validates a model against another one. Therefore
we name this model cross-validation model.
Cristani, M., Olvieri, F., Workneh, T., Pasetto, L. and Tomazzoli, C.
Classification Rules Explain Machine Learning.
DOI: 10.5220/0010927300003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 897-904
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
897
The basic idea of this paper is that a classifica-
tion system C explains another classification system
C
0
when two conditions hold:
• C is an approximation of C
0
, i.e., the way in which
C forecasts the results is close to the way in which
C
0
does so, and
• C is a readable rule-based systems. We will pro-
vide a non-formal definition of this concept of
readablility in the following paragraphs.
To better identify the underlying concept, we pro-
vide here a toy example about the basic notion of ex-
plainability.
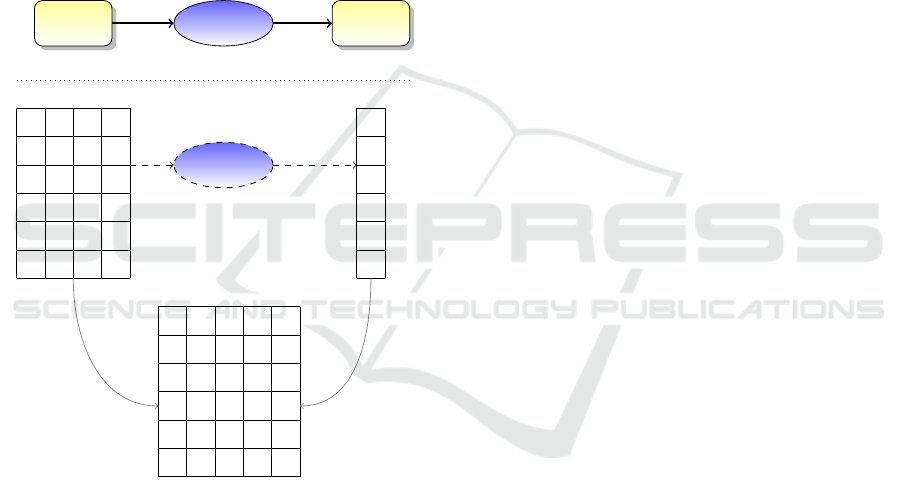
Example 1. Consider a binary classification system
that we can only observe as an input-output black box
technology, as illustrated in Figure 1. Assume that
Input Data
Classifier
Output
F
1
F
2
F
3
F
4
C
F
1
F
2
F
3
F
4
C
Figure 1: A black box input-output data configuration.
the rows in the table under analysis of the observed
classifier respond to one association rule R1 and to an
association rule R2, each (for the sake of simplicity)
with a positive error of 3% and a negative error of 2%
The two rules establish
• R1 when the values in column F1 are greater than
a threshold value limit t
F1
and the values in col-
umn F2 are less than a threshold value t
F2
then
the classification value on column C is true;
• R2 when the values in column F3 are greater than
a threshold value t
F3
and the values in column F4
are less than a threshold value t
F4
then the classi-
fication value on column C is true.
Now, the rule system {R1, R2} is an approxima-
tion of the black box that has a positive error of 3%
and a negative error of 2%.
Based on the idea illustrated above, we build a
model of explanation that can be summarised as fol-
lows: explaining means approximating with the con-
straint that an approximation is better when it is sim-
pler. Therefore, to devise a good technology for ex-
plaining a black-box system, we need to identify a
system that is readable and a hierarchy among read-
able systems that are as simpler and more accurate
(precise or recalling) as possible.
The rest of this paper is organised as follows. Sec-
tion 2 introduces some basic notions used in the rest
of the paper, and Section 3 discusses an algorithmic
approach based on the introduced notions. Section 5
reviews relevant literature, and Section 6 takes con-
clusions and sketches further work.
2 BASIC DEFINITIONS
We introduce, from scratch, some basic notions that
we are about to use in order to introduce a notion of
explainability that is to be formalised in the rest of
this paper. There is a large part of readers who might
consider this section very introductory. However, it
is important to get to the ground notions to highlight
how a notion of actual explainability should be intro-
duced.
Definition 1. Assume a collection of three datasets
hTrain, Test, Execi where: (i) the training set Train
and the test set Test are formed by the same n + 1
columns, and (ii) the execution set Exec is formed
by the first n columns of training and test sets. We
name these n columns the classification features and
the (n + 1) −th one the class.
The classification problem consists in defining a
method that learns the class classification to the clas-
sification features from the training set, verifies it on
the test set to provide its measures of accuracy, pre-
cision and recall and finally applies the classification
to the execution test, where we expect the behaviour
of the classifier will respect the measures taken on the
test set.
A system like the one just devised above is said
to be a classifier. Every classifier is intrinsically de-
scribed by its confusion matrix that is a k-entry ma-
trix establishing the relative account of elements (fre-
quency) in each class obtained for each value of the
classification by the classifier performed on the test
set. When the classifier is binary (i.e., the classes
are only two), the matrix cells are named true pos-
itive (T P), false positive (FP), true negative (T N),
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
898

and false negative (FN), indicating the elements: (i)
correctly classified (true positive and true negative),
and (ii) incorrectly classified (false positive and false
negative). In general, when looking at the confu-
sion matrix we also use the acronyms P = T P + FN
for positive elements, N = T N + FP for negative ele-
ments, T = T P +FP for elements classified correctly,
F = FP + FN for elements classified incorrectly and
finally A = T P+FP+T N +FN for the size of test set
(namely all elements. We henceforth limit ourselves
in studying binary classifiers.
Accuracy is the frequency of a classifier correct
answers. It is defined as
a(C) =
T P + T N
A
=
T
A
= 1 −
F
A
Precision measures the probability of the classi-
fier’s positive answers to be correct. In other terms,
the more a classifier is precise, the fewer are the posi-
tive incorrect answers it gives. It is defined by
p(C) =
T P
T P + FP
=
T P
T
Recall measures the probability of the classifier’s
negative answers to be false. In other terms, the
higher is a classifier’s recall, the more are the posi-
tive correct answers it gives. It is defined by
r(C) =
T P
T P + FN
=
T P
P
Once we have trained a classifier on the training
set, we can measure its behaviours in terms of quality
of the classification on the test set.
We can now introduce a measure that has been
used in various applications of classification rules,
and in general applies to rule-based systems includ-
ing decision trees. To do so, we start by formalising
the notion of classification rules.
A simple value constraint may be either an equal-
ity constraint, where a feature is set to be valued
in a given way, an inequality constraint, that is the
opposite of the above, and a minority/majority con-
straint when it imposes the value of the feature to
span below/over a given value on the range of ad-
missible values for that feature. A minority/majority
constraint can be either weak (while including the ex-
treme value) or strong (while excluding the extreme
value). When the values of a feature are not or-
dered, then the equality/inequality constraints are the
only admissible ones. Boolean expressions on simple
value constraints are hence value constraints.
Definition 2. An classification rule is a classifier that
consists of a test of value constraints on the features
for a classification problem that forecasts the class of
that problem.
It is not difficult to show that every value con-
straint on an ordered domain can be represented by
a finite collection of intervals and semi-intervals,
along with a finite set of inequalities (Stergiou and
Koubarakis, 2000). Conversely, when a discrete un-
ordered and finite domain is involved, the largest
number of elements involved in a value constraint is
exactly the size of the domain minus 1. For instance,
if a finite domain is formed by three elements, then
admissible constraints are 7, corresponding to the re-
quest to range over a subset of the 3 elements.
R1 of Example 1 is a classification rule. An classi-
fication rule system is a set of rules, that are to be ap-
plied disjunctively, and assumed to validate one single
class. The set {R1, R2} of Example 1 is a classifica-
tion rule system. An element of the test or execution
set is classified by means of a rule system when it is
valued by at least one of the rule system in that class.
At a very simple level, we can introduce a notion
of complexity of a rule. A rule length is the sum of
intervals or the sum of disjoint values for unordered
and finite domains, for each feature.
Example 2. Consider a feature F1 ranging on natu-
ral numbers, and a feature F2 ranging on real num-
bers. A rule consists in the expression:
((1 ≤ F1 ≤ 12) ∨ (14 ≤ F1 ≤ 33))
∧ ((F2 6= 3.14) ∧ (F2 ≥ 2.72)) → True
The length of the above rule is 4, because the con-
straints appearing in it are formed in turn by two pairs
of constraints on two different features, both of length
two. Clearly, when a rule R has length l
1
and a rule
R
0
has length l
2
, then l
1
≤ l
2
is to be read R is shorter
than R
0
.
Two rules are in the containment order ⊆ (R1 ⊆
R2) iff when R2 is satisfied then R1 is satisfied. For
instance, consider a rule R
0
:
((1 ≤ F1 ≤ 12) ∨ (14 ≤ F1 ≤ 33)) → True
and a rule R
00
:
((1 ≤ F1 ≤ 12)) → True
R
0
and R
00
in the relation R
0
⊆ R
00
. In fact, when
R
00
is satisfied, R
0
is satisfied as well. A rule R is said
to be simpler than a rule R
0
when R is shorter than R
0
and R
0
⊆ R. Extensively, a rule set S
1
is simpler than
a rule set S
2
when each rule of S
1
is simpler than at
least one rule in S
2
.
We can provide an absolute measure of complex-
ity of a classification rule system by computing its
volume a measure inspired by classic software met-
rics: the product of maximum length of a rule in the
system and number of rules. This notion of volumes
Classification Rules Explain Machine Learning
899

presents two primary advantages that we need to con-
sider in this phase.
When two systems have the same volume they can
be rather different but may be reasonably similar in
terms of the effort we need to devise them. The com-
putation of rules is expensive both in terms of required
design effort, and in terms of the computational effort
to build the rules. Both effort of design and compu-
tational cost depend on the length of the rules and on
the number of rules. We could have considered length
of the rule system as the sum of lengths of the rules.
However, these would have made equivalent two sys-
tems in a way that is in fact independent of the number
of rules. This is actually different from what we ex-
pect to be a good explanation. In fact, an explanation
should be understandable, and therefore we expect it
to be made of simple rules and that these rules are
not too many. Obviously we should get a tradeoff,
for the ideal explanation would result, from the above
premises, the empty rule system. Therefore, volume
is a better measure of length, for it could accommo-
date, in the same volume, or roughly the same, a num-
ber of possible different explanations that are similar
in terms of design effort, and let us able to choose the
best ones, by considering the most accurate or precise
or recalling.
To summarise, the idea is that when two approx-
imations are comparable in terms of simplicity we
should choose the most accurate (precise, recalling),
and on the opposite, when two approximations are
comparable in terms of accuracy (respectively preci-
sion, recall) we should choose the simpler one.
We can shift our attention to the details of the ap-
proach, by devising a method to compute approxima-
tions for a black box classifier. Consider a classifier
C that we cannot look more in detail than by its be-
haviour, namely by looking at the results of the clas-
sification on an execution test, without knowing how
the results are obtained. The idea of the method is
to perform the classification on a subset of the exe-
cution set, that we can control. On the input/output
behaviour of the classifier we can build a training set,
that is used to extract a classification rule set. We are
now able to build a confusion matrix and use it to de-
vise the correct understanding of the behaviour of the
classifier.
Specifically, when such a method is computed, we
can state that a binary classifier C has been approxi-
mated by a classification rule system S with accuracy
α, precision π and recall ρ (by using the measures ob-
tained by the confusion matrix) with volume V . Ide-
ally, we should also derive the idea that a rule set
is a better approximation of a given classifier when
it has the same accuracy (respectively precision, re-
call) but a smaller volume, or the same volume but a
better accuracy (respectively precision, recall). Obvi-
ously, the idea that accuracy, precision and recall re-
main the same (either alone or in triple) is unrealistic,
for these values are intrinsically unstable on classifi-
cation rule setup. We can establish a range interval on
which accuracy, precision and recall are to be consid-
ered equivalent, that is the confidence on that opera-
tion. The confidence is thus a value χ such that when
accuracy (respectively, precision, recall) of a set S
1
is to be considered roughly the same of accuracy (re-
spectively, precision, recall) of a set S
2
is that because
|α(S
1
) − α(S
2
)|≤ χ (and correspondingly for π and
ρ).
Therefore, we can state that a rule set S
1
is a better
approximation of a rule set S
2
because S
1
has less vol-
ume than S
2
and they are ordered by better accuracy
(respectively, precision, recall) or at most roughly the
same.
3 ALGORITHMS FOR
EXPLAINING THE BLACK BOX
Given the analysis discussed above, we can devise a
method to compute optimal rule systems that approx-
imates a classifier, or, on more practical design of the
method, a rule system that approximates a classifier
with an acceptable accuracy (respectively precision,
recall). Consider an approximation S
1
. We can make
two kinds of operations. The former consists in look-
ing for admissible simplifications that preserve accu-
racy (respectively precision, recall) and reduce vol-
ume. The latter, on the opposite, looks for improve-
ment on the accuracy (respectively precision, recall)
but preserve volume.
At this point of this discussion, we need to specify
an important aspect of the concept of rule system we
have devised so far. The idea of disjunctive systems is
quite simple, and it is so for we can provide room for
constraints on the range by means of a method that
results polynomial on deterministic machines. The
majority of methods like Apriori as well as methods
for similar approaches to other rule system, as in, for
instance, decision trees, provide incremental compu-
tation of the rule system. Thus, a rule system is more
complex and potentially more accurate, precise and
recalling, then the rule system computed on the previ-
ous step by those methods. To obtain good explana-
tions we therefore should look at these methods with
a critical eye: the purpose of the computation is to
choose among the partial solutions obtained by these
methods that we consider good explanations, more
than good classifiers. In fact, we do not really have
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
900

a comparison with the ground truth, for the only ob-
ject we look at is a classifier that acts in the realm
of the execution set. We should manage a choice of
the quality of the explanation by looking at the rel-
ative accuracy (respectively precision, recall) but we
cannot ensure that the approximation obtained only
introduces the errors we measure on the relative com-
parison, for new errors could have been introduced,
as well as errors made by the explained classifier are
incorporated as well (and obviously we can also have
the opposite, inverted effect, where errors of the ex-
plained classifier are corrected by the explanation).
The above reasoning can be described as the core
of the methodology we propose here. Let us sum-
marise the concept we are looking at:
1. We are given a black box classifier C, for which
we aim at computing an acceptable explanation
E;
2. We assume a partition of the domain classified by
C in two subsets Train and Test, where the classes
(positive and negative) are assigned;
3. We use the subset of the execution set Train to
devise a collection of rule classification systems;
4. We choose among the systems computed in the
above Step 3 an explanation that has both a good
volume, and a good accuracy (respectively preci-
sion, recall).
Naturally, computing every possible system is un-
affordable, for even if the number might be finite, is
likely to be unacceptably large. A possible way to
overwhelm the mentioned drawback is to limit to a
method that works on incremental algorithm
At first, as an initial perspective, we evaluate the
opportunity of applying the devised approach Con-
sider a feature F1 ranging over an infinite range of
values. Given a set of records on which the train-
ing set sets the value of the row to true, we can col-
lect the values in total order by ordering algorithm in
O(n · log(n)). Once we have devised the correct or-
dering, the line of values can be marked by the class
elements true, and therefore partitioned into open in-
tervals.
For instance, assume that we have F1 valued
a
1
, a
2
, . . . , a
5
on n rows, and that a
1
and a
2
are val-
ued true, while a
3
is valued false, and a
4
and a
5
are both valued true. The interval partition is (F1 ≤
a
2
) ∨ (a
2
< F1 < a
4
) ∨ (F1 ≥ a
4
). Each single rule
generated in this way matches the training set with
no errors, but other disjunctive rules can be gener-
ated with errors as well. For instance, in particular
for discrete cases, we may have situations in which
a value is attributed to a feature and that feature has
some true and some false with that value. The major-
ity method chooses the most frequent among the two
cases, the unanimity method chooses true only when
all the cases unanimously give a true. Mix strategy
lies on the notion that instead of basic majority we
require qualified one to reinforce the method (that is
equivalent to mitigating the unanimity by requiring
a significant percentage instead of 100%). Clearly,
generating rules on single feature does not improve
the results significantly, for they could only be con-
sidered separately, and there is an extensive literature
on how to combine them that has shown to work only
in specific and limited conditions.
All the above notions are quite well-known from
Decision Tree approaches as well as association rules.
The novelty we introduce here is the idea that ap-
proximation is computed by using one of these ap-
proaches, and then evaluated by means of the notions
of relative accuracy (respectively precision, recall)
and total volume as a measure of the quality (sim-
plicity) of the approximation. If we thus consider an
approximation obtained by a rule set S we can state
that S is a good approximation when it is the simplest,
or when it has the best relative accuracy. Clearly the
two quantities are in tradeoff. It is very likely that the
simplest explanation would not result to be the most
relatively accurate, and the way around. If we start
with an Apriori method, we can simply generate the
fit rules one at a time, and evaluate the resulting rule
set in terms of volume. Classic implementations of
Apriori allow us to do so, by invoking it on the ba-
sis of the step to be performed. Once we have in-
voked the algorithm, we can obtain the values of the
resulting approximation. During this process we can
keep information on the computed model by enumer-
ating the results along with the accuracy (respectively
precision, recall) and the volume. At the end of the
Apriori execution we can generate the partially or-
dered set of these approximations and choose the best
candidate, namely among the ones with optimal vol-
ume that with best accuracy (respectively precision,
recall). The volume and accuracy (respectively pre-
cision, recall) could be specified with a parameter of
rough equivalence, χ
V
, χ
α
(χ
π
, χ
ρ
) that is passed to the
algorithm itself.
4 EXPLANATION ALGORITHMS
The basic explanation method we introduce is exactly
the Apriori algorithm, that is trapped in each step of
the refinement. Apriori algorithm. This is introduced
in Algorithm 1.
Classification Rules Explain Machine Learning
901
Algorithm 1: Apriori algorithm.
1: L
1
← Frequent1 − itemset
2: k ← 2
3: while L
k−1
6= φ do
4: Temp ← candItemSet(L
k−1
)
5: C
k
← f reqO f ItemSet(Temp)
6: L
k
← compItemSetWithMinSup(C
k
, minsup)
7: k ← k + 1
8: end while
9: return L
With a little abuse of notation we assume here that
the algorithm we implement invokes Apriori until step
k, and left it suspensively waiting for another invoca-
tion (as in trap/interrupt parallelism methods). There-
fore we shall name this invocation by Apriori(k). Al-
gorithm 2 considers the measure λ, that could be ac-
curacy, precision or recall.
Substantially, Algorithm 1 is an anytime version
of the classic mining method for association rules.
We introduced this concept here, for three distinct rea-
sons.
• Firstly, we need a method that could be devised to
perform in practice. Every technique of associa-
tion rule generation is computationally expensive,
and since the computation of explanations is here
explorative, for we need to understand, at least
in principle, what explanation is the best, or, at
least, whether an explanation is acceptable, there
is a serious risk of not being able to conclude the
analysis within an even not particularly restrictive
practical time limit;
• Secondly, Apriori is a very basic approach, and
allow us to provide the second step of the investi-
gation, described in 6, where human in the loop
analysis is to be performed in order to validate
with a gold standard the introduced notion of vol-
ume;
• Thirdly, for we look at an explainability concept
that can be used even when we do not know what
features have been extracted (as in the deep learn-
ing approach) and aim at devising a very general
methodology for rule-based systems.
One main drawback of the above devised method
is the limited ability that it has to refine the results.
In fact, by definition of the Apriori method, every
step increases the coverage given by the rules, and
on the same time it simplifies the rules, by generat-
ing a classifier that has a smaller or identical volume.
Therefore, the probability that the computed solution
is computed just at the end of the execution of the al-
gorithm is very high being the stability of the method
very unusual. The introduction of the χ values. The
Algorithm 2: Computing volume and accuracy algorithm.
1: Stack ←
/
0;
2: k ← 1
3: while Apriori is not terminated, Increment k do
4: Invoke Apriori(k);
5: Compute Volume and λ of L
k
;
6: push Index of L
k
, volume, λ;
7: end while
8: return Stack optimal by (Volume, λ) extensively
considering the volume under the constraint of
range equivalence given by χ
V
and accuracy (re-
spectively precision, recall) under the appropriate
parameter χ
λ
(with λ = α, π, ρ)
second, well known drawback, regards the types of
the data, that need to be discrete and finite. In fact,
with infinite value ranges the predictive capability
of Apriori algorithm is very basic, while with Deci-
sion Trees we can have much better results, from this
viewpoint. However, while Apriori is definitely in-
terruptible, by means of the invocation parameter k,
as shown above, it does not make any sense to in-
terrupt a DT method, for the computation of the tree
could just be stopped over in the wrong deepening.
The only case in which this can be done is when the
method used to generate the tree starts from the root,
and goes, bread-width, downward. This is the case of
ID3. Again we could imagine to substitute the invo-
cation to Apriori(k) by the invocation to ID3(k) where
k denotes the level of the Decision Tree generated so
far, we obtain the very same method of Algorithm 2.
The usage of ID3 could, potentially, improve the
performances, while letting the underlying process
of explanation intact. In the future we shall explore
much more deeply methods that are based upon logic
programming, such as Inductive Logic Programming,
and Answer Set Programming.
To summarise the approach we consider two ex-
planations ordered when they are similar in terms of
volume and one is better than the other one in terms of
accuracy (respectively precision or recall), or on the
opposite, when they are similar in terms of accuracy
(respectively precision, recall) but one has a smaller
volume. Measuring volume is very easy for associ-
ation rules, and can be extended in a straightforward
way to decision trees. The very same notion cannot
be applied to black-box systems.
Let us consider a simple abstract example. As-
sume that we aim at approximating a black-box sys-
tem C. We can describe by hTrain, Test, Execi the
split of the input to C observed in a period of obser-
vation (data are randomly chosen to belong to Train
and Test). After this period, we can feed Algorithm
2 with Train set and compute alternative Apriori so-
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
902

lutions to approximate the black-box. At top of the
stack at the end of the process we shall have an Apri-
ori set of rules that exhibit a good volume, in the sense
that this will be the best (minimum) volume obtained
by the anytime performance of the Apriori method.
While comparing two elements in the stack, we
may have either a better element that has less rules,
or a better element that has short maximum rule. On
the other side of the evaluation, when two Apriori so-
lutions are comparable in terms of volume, we may
choose the best one in terms of accuracy (precision,
recall). Notice that even a limited (within a given
threshold) loss in terms of accuracy (precision, recall)
or in terms of volume could be accepted as fruitful. In
fact, when the Apriori anytime method devised above
acts, we do not really know what is computed in terms
of rules, for we can drop rules based on the invoca-
tion by Algorithm 2. Essentially, as it is devised, the
method could use volume as an heuristic for a search
in the solution space in a potential implementation
based on efficient search algorithms such as SMA
∗
.
Note that the interruptible method is based on the
very useful property of Apriori to discover rules in
order of length. Therefore, dropping a rule requires a
specific method. We have experimented two different
possible conditions:
• We may drop rules that have limited coverage.
This is a good idea in general, for they contribute
only a little to the usefulness of the approach.
However, typically, rule coverage decreases with
length, and therefore the dropping will not be par-
ticularly effective;
• We may drop rules based on their relationship
with shorter rules. For instance we do not need to
generate a rule that has a superset of antecedents
with respect to another rule already selected;
5 RELATED WORK
The long path that is bringing us from black box tech-
nologies, as for instance deep learning ones, to ex-
plainable solutions, has been only recently carried
out. Moreover, there is an open debate on the actual
features that we expect from an explainable system.
First of all, we have in mind two crucial points:
• Explainable systems should be readable by hu-
mans, but also should be usable in order to iden-
tify the meaning of the machine learning activity
that is performed;
• Explainability is both an issue of the design of a
system, and of the interpretation of them.
What are thus explainability it twofold: good ex-
planations for existing systems, and methodologies
to design new systems that behave in an explainable
way. On the way of this path we should consider the
explainability as a basic property. There has been a
recent focus on this very basic issue: how can we
measure explainability? Answers to this question are
central in the process of making our effort.
In a high level perspective, the study of Pedrycz et
al. (Pedrycz, 2021) has provided a specific viewpoint
on a variety of possible approaches to be employed
for explainability, while discussing, in particular, the
basic notion of explanation as a means to guarantee
coordination of different learning methods.
Very general viewpoint on explainability can be
found in the survey and also comparative study pro-
vided by Molnar et al. (Molnar et al., 2020) who re-
viewed critically the approaches developed so far on
the argument of approximation for explainability. On
research specific issues, we refer to the path of re-
search conducted by Mereani et al. since 2019’s pre-
liminary study (Mereani and Howe, 2019) and further
deepening (Mereani and Howe, 2021). For what con-
cerns deep learning explanations Soares et al. have
provided a comprehensive approach that could be
considered the counterpart of the neural network in-
vestigation of Mereani et al. (Soares et al., 2021).
Association rules have been specifically investi-
gated as means for explaining black boxes by Moradi
et al. (Moradi and Samwald, 2021).
6 CONCLUSIONS AND FURTHER
WORK
The promising results of this investigation are mainly
due to the intuition that a rule-based system can be
measured to perform better in terms of explainability
than a black-box one. In fact, deep learning methods
exhibit high accuracy, precision and recall for many
real-world cases in which perception is involved, but
when reasoning is involved than many aspects that
cannot be considered in deep learning take place.
First of all, as amplily argued in many studies con-
cerning hybrid reasoning (see, for instance, (Cristani
et al., 2018b; Cristani et al., 2018a)), the connection
between reasoning and decision making is strict, and
therefore data coming from observations, including
those related to perception are only a part of the deci-
sion process, for the knowledge we do have in front of
the perception influences our conclusions. Secondly,
practical usages of methods derived from Logic can
incorporate that knowledge in the decision process,
whilst perception-driven methods cannot.
Classification Rules Explain Machine Learning
903

Further developments of this study will be fo-
cusing on three aspects: (1) the applicability of
logic programming methods, that some of the authors
have been dealing with before (Cristani et al., 2015;
Cristani et al., 2014; Olivieri et al., 2015; Cristani
et al., 2016b) when connected to machine learning
problems, (2) the usage of Inducive Logi Program-
ming appraoches as in (Lisi, 2008; Lisi, 2010; Lisi
and Straccia, 2013), and (3) the study of applications
in specific mining domains, including in particular
social network and the web, for process mining pur-
poses (Cristani et al., 2016a; Cristani et al., 2016c).
One important step that we shall carry out rather
immediately aims at deploying an experiment with
human subjects to validate the notion of volume as
a predictor, along with performance indices like ac-
curacy, precision and recall, of the judgment on ex-
plainations for a black-box system.
REFERENCES
Cristani, M., Domenichini, F., Olivieri, F., Tomazzoli, C.,
and Zorzi, M. (2018a). It could rain: Weather fore-
casting as a reasoning process. volume 126, pages
850–859.
Cristani, M., Fogoroasi, D., and Tomazzoli, C. (2016a).
Measuring homophily. volume 1748.
Cristani, M., Karafili, E., and Tomazzoli, C. (2014). Energy
saving by ambient intelligence techniques. pages 157–
164.
Cristani, M., Karafili, E., and Tomazzoli, C. (2015). Im-
proving energy saving techniques by ambient intel-
ligence scheduling. volume 2015-April, pages 324–
331.
Cristani, M., Olivieri, F., and Tomazzoli, C. (2016b). Auto-
matic synthesis of best practices for energy consump-
tions. pages 154–161.
Cristani, M., Olivieri, F., Tomazzoli, C., and Zorzi, M.
(2018b). Towards a logical framework for diagnostic
reasoning. Smart Innovation, Systems and Technolo-
gies, 96:144–155.
Cristani, M., Tomazzoli, C., and Olivieri, F. (2016c).
Semantic social network analysis foresees message
flows. volume 1, pages 296–303.
Lisi, F. (2008). Building rules on top of ontologies for the
semantic web with inductive logic programming. The-
ory and Practice of Logic Programming, 8(3):271–
300.
Lisi, F. (2010). Inductive logic programming in databases:
From datalog to DL+log. Theory and Practice of
Logic Programming, 10(3):331–359.
Lisi, F. and Straccia, U. (2013). Dealing with incomplete-
ness and vagueness in inductive logic programming.
volume 1068, pages 179–193.
Mereani, F. and Howe, J. (2019). Exact and approximate
rule extraction from neural networks with boolean fea-
tures. pages 424–433.
Mereani, F. and Howe, J. (2021). Rule extraction from neu-
ral networks and other classifiers applied to xss detec-
tion. Studies in Computational Intelligence, 922:359–
386.
Molnar, C., Casalicchio, G., and Bischl, B. (2020). Inter-
pretable machine learning – a brief history, state-of-
the-art and challenges. Communications in Computer
and Information Science, 1323:417–431.
Moradi, M. and Samwald, M. (2021). Post-hoc explana-
tion of black-box classifiers using confident itemsets.
Expert Systems with Applications, 165.
Olivieri, F., Cristani, M., and Governatori, G. (2015). Com-
pliant business processes with exclusive choices from
agent specification. Lecture Notes in Computer Sci-
ence (including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics),
9387:603–612.
Pedrycz, W. (2021). Design, interpretability, and explain-
ability of models in the framework of granular com-
puting and federated learning.
Soares, E., Angelov, P., Costa, B., Castro, M., Nageshrao,
S., and Filev, D. (2021). Explaining deep learn-
ing models through rule-based approximation and vi-
sualization. IEEE Transactions on Fuzzy Systems,
29(8):2399–2407.
Stergiou, K. and Koubarakis, M. (2000). Backtracking al-
gorithms for disjunctions of temporal constraints. Ar-
tificial Intelligence, 120(1):81–117.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
904
