
A Comprehensive Study of Vision Transformers on Dense Prediction
Tasks
Kishaan Jeeveswaran, Senthilkumar Kathiresan, Arnav Varma, Omar Magdy, Bahram Zonooz
and Elahe Arani
Advanced Research Lab, NavInfo Europe, Eindhoven, The Netherlands
Keywords:
Vision Transformer, Convolutional Neural Networks, Robustness, Texture-bias, Object Detection, Semantic
Segmentation.
Abstract:
Convolutional Neural Networks (CNNs), architectures consisting of convolutional layers, have been the stan-
dard choice in vision tasks. Recent studies have shown that Vision Transformers (VTs), architectures based on
self-attention modules, achieve comparable performance in challenging tasks such as object detection and se-
mantic segmentation. However, the image processing mechanism of VTs is different from that of conventional
CNNs. This poses several questions about their generalizability, robustness, reliability, and texture bias when
used to extract features for complex tasks. To address these questions, we study and compare VT and CNN
architectures as a feature extractor in object detection and semantic segmentation. Our extensive empirical
results show that the features generated by VTs are more robust to distribution shifts, natural corruptions, and
adversarial attacks in both tasks, whereas CNNs perform better at higher image resolutions in object detection.
Furthermore, our results demonstrate that VTs in dense prediction tasks produce more reliable and less texture
biased predictions.
1 INTRODUCTION
CNNs’ remarkable performance has made them the
prominent choice of architecture in computer vision
tasks (He et al., 2016; Tan and Le, 2019). On the
other hand, the Transformers have become dominant
in NLP owing to their ability to learn long-term de-
pendencies via self-attention. Recent breakthrough of
VTs (Dosovitskiy et al., 2020) demonstrated that the
Transformer-based architecture can also be applied to
image classification. This motivated the vision com-
munity to adapt the self-attention based architectures
as feature extractors for more complex tasks such as
depth prediction (Ranftl et al., 2021), object detec-
tion, and semantic segmentation (Liu et al., 2021;
Srinivas et al., 2021). VTs have achieved compelling
performance in these tasks, presenting them as an al-
ternative architectural paradigm.
However, the mechanism by which VTs process
the images is significantly different from that of well-
studied CNNs. CNNs use a sequence of convolutional
layers to extract features with progressively increas-
ing receptive field. These convolutional layers have
inherent inductive biases, such as locality and transla-
tion equivariance, that are helpful for computer vision
tasks. However, their local receptive field makes them
incapable of capturing the global context. VTs, on the
other hand, split the input image into non-overlapping
tokens, and use a sequence of self-attention modules
to process these tokens. These self-attention modules
have global receptive field, but they lack the inductive
biases inherent in convolutional layers, making them
data hungry. Therefore, the choice of these two archi-
tectures comes with their own merits and limitations.
The difference in the fundamental working prin-
ciples of VTs compared to CNNs raises many ques-
tions: How well do they perform for distribution
shifts? How robust are they to the adversarial attacks?
How reliable are their predictions for real-world ap-
plications? To what extend they learn the shortcuts,
such as the texture of an object, rather than the in-
tended solution? Although few of these questions are
addressed in the image classification domain (Bho-
janapalli et al., 2021; Paul and Chen, 2021), they have
not yet been fully addressed for complex tasks in-
cluding detection and segmentation. To this end, we
perform an in-depth analysis by constructing simple
detection and segmentation models using DeiT (Tou-
vron et al., 2020) as the feature extractor for dense
prediction tasks. Our contributions are as follows:
Jeeveswaran, K., Kathiresan, S., Varma, A., Magdy, O., Zonooz, B. and Arani, E.
A Comprehensive Study of Vision Transformers on Dense Prediction Tasks.
DOI: 10.5220/0010917800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
213-223
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
213
Transformer
Encoder
N embeddings
Image
N, 16x16 patches
Reshape
CCCC IIII
I I I I
FM1
FM2 FM3
FM4 FM5
H/4 X W/4 X 256
H X W X N
c
FCOS Head
FM1
FM2 FM3 FM4 FM5
C
Per Pixel
Classification
Bbox +
Classification
Segmentation
Head
Object Detection
Head
DDDI
FM1 FM2 FM3 FM4 FM5
64 X 64 X K
32 X 32 X K
16 X 16 X 512
8 X 8 X 512
4 X 4 X 512
I
Interpolate
D
Downsample
C
Concatenate
...
...
...
Patch Embedding
Class token
*
#
Distillation
token
Position
Embedding
*
#
#
*
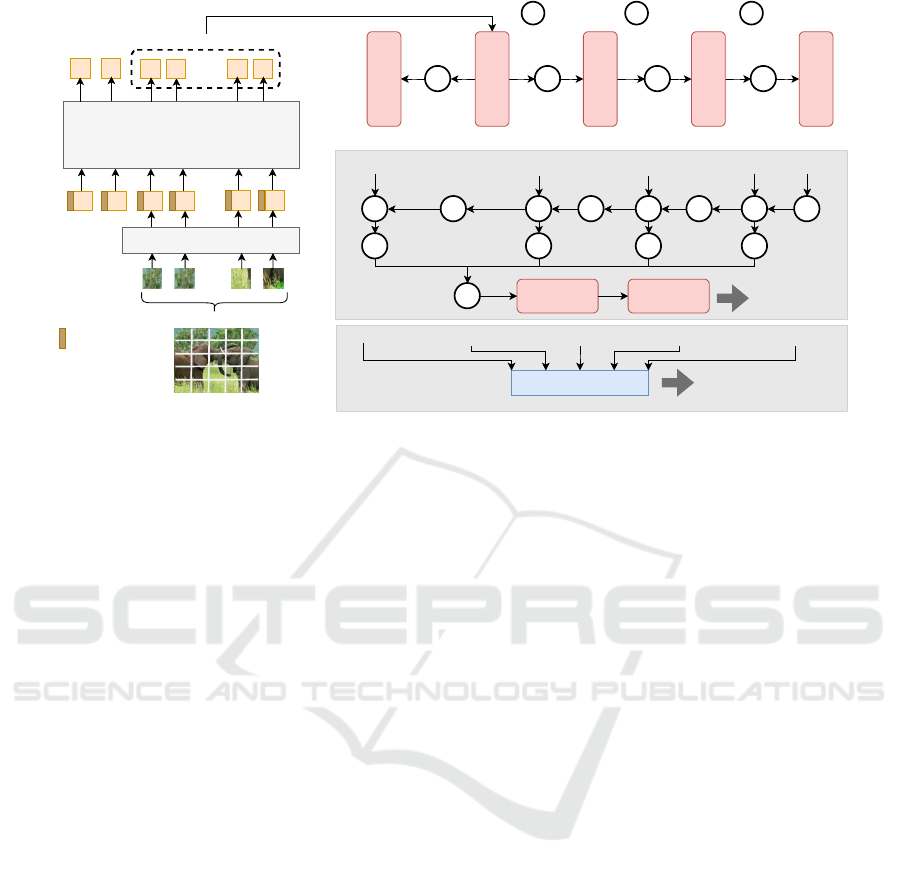
Figure 1: Architecture for object detection and semantic segmentation with VT backbone.
• Evaluating on in-distribution-dataset, we find VTs
are more accurate but slower than CNNs coun-
terparts. In addition, the results on out-of-
distribution (OOD) dataset reveals that VTs are
also more generalizable to distribution shift.
• Our results show that VTs are better calibrated
and thus, more reliable than CNNs, thereby mak-
ing them better suited for deployment in safety-
critical applications.
• Increasing the inference image resolution, we
show that the performance of both VTs and CNNs
degrade. However, in detection, CNNs outper-
form their VT counterparts at higher resolutions.
• We demonstrate that VTs converge to wider min-
ima compared to CNNs, which we attribute to
their generalizability.
• We show that VTs are consistently more robust
to natural corruptions and (un)targeted adversarial
attacks than CNNs.
• We extend the texture bias study (Bhojanapalli
et al., 2021) for dense prediction tasks. The re-
sults show that the VTs are less dependent on tex-
ture cues than CNNs to make their predictions.
2 RELATED WORK
Transformer architectures adapted for image classi-
fication, such as ViT (Dosovitskiy et al., 2020) and
DeiT (Touvron et al., 2020), have achieved compa-
rable performance to state-of-the-art CNNs. Later
methods modified these vision transformers(VTs) to
act as feature extractors in dense prediction tasks such
as object detection, semantic segmentation, and depth
prediction (Wang et al., 2021; Liu et al., 2021; Ranftl
et al., 2021). The progress of VTs present them as an
alternative architecture to CNNs across vision tasks.
To study the impact of architecture change, re-
cent works have compared VTs and CNNs on as-
pects beyond speed and accuracy for image classifi-
cation. Among these works, studies such as (Bho-
janapalli et al., 2021) and (Paul and Chen, 2021) have
compared VTs and CNNs in terms of robustness to
adversarial attacks and natural corruptions. (Naseer
et al., 2021) further studied the texture-bias of VTs
and CNNs for image classification. (Minderer et al.,
2021) additionally investigated the model calibration
of VTs and CNNs, and demonstrated that type of ar-
chitecture is a major determinant of properties of cal-
ibration. However, there has been no study of the im-
pact of VTs on generalizability, robustness, calibra-
tion, and texture-bias in dense prediction tasks, in-
cluding detection and segmentation, when replacing
CNNs as the feature extractor.
We perform an exhaustive comparison of VTs and
CNNs for their generalizability to higher resolutions
and distribution shifts, robustness to adversarial at-
tacks and natural corruptions, reliability, and texture-
bias for object detection and semantic segmentation.
3 METHODOLOGY
We conduct the comprehensive empirical study on ob-
ject detection and semantic segmentation tasks with
CNN and VT backbones of different sizes. Here, we
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
214

explain the details of architecture used in this study.
3.1 Transformer as a Feature Extractor
We use Data Efficient Image Transformer (DeiT)
(Touvron et al., 2020) as our VT feature extrac-
tor. In DeiT, the input image is divided into N non-
overlapping patches of a fixed size (16 × 16) and
the patches are flattened and embedded using a lin-
ear layer to K dimensions. A position embedding
is added element-wise to the patch embeddings to
help the model to understand some notion of the or-
der of the input patches. The resulting tensor is
given as input to repeated blocks of self-attention and
feedforward layers. The final representation of class
encoding is passed through a feedforward network
(FFN) before feeding it to a softmax layer to infer
the classes. The class encoding learns the context and
class specific information from the image patches.
We modify DeiT to make it suitable for object de-
tection and semantic segmentation by removing the
FFN and refining the outputs of the final block (N +2
embeddings) before passing on to the heads. The re-
finement process includes removing the class and dis-
tillation embeddings (used in DeiT for classification)
after which N embeddings remain. These N embed-
dings are reshaped into a feature map of 32 × 32 × K
(FM2 in Figure 1). A series of convolutional down-
sampling layers are used to create multiple feature
maps of spatial dimensions 16 (FM3), 8 (FM4), and
4 (FM5) from FM2. Finally, FM2 is upsampled to
obtain a feature map of spatial dimension 64 (FM1).
These five feature maps are then passed to the predic-
tion head of the models.
3.2 Detection Head
For object detection, we use Fully Convolutional
One-Stage object detector (FCOS) (Tian et al., 2019),
an anchor-free method that makes predictions based
on key-point estimation, and is one of the state-of-the-
art methods. The detection head infers the classifica-
tion score, bounding box parameters, and centerness
score, and is shared between feature maps at multiple
scales (FM1 to FM5) as shown in Figure 1. Since it
is a pixel-wise dense bounding box predictor, the cen-
terness score is used to suppress low quality bounding
boxes which are predicted at pixel locations far away
from the object center.
3.3 Segmentation Head
For segmentation, the outputs of the backbone are
passed to a light-weight segmentation head to infer
dense pixel-wise classification scores. In the seg-
mentation head, starting from the smallest spatial res-
olution, every feature map is interpolated and con-
catenated in the channel dimension with the adjacent
larger feature map. The same approach is adopted for
the subsequent feature maps. These feature maps are
bilinearly interpolated to one-fourth of the input res-
olution, and concatenated. Finally, bilinear interpola-
tion is used to upsample the resultant feature map to
the input resolution, which predicts the class proba-
bilities for every pixel.
4 EXPERIMENTAL SETUP
The experiments are conducted on both detection and
segmentation tasks for VT and CNN backbones of
different network sizes. We use three DeiT variants
as VT backbone - Tiny(T), Small(S), and Base(B)
with input patch size 16×16 - and three CNN counter-
parts with the same range of parameters - ResNet-18
(RN-18), ResNet-50 (RN-50), ResNeXt-101 [32×8d]
(RNX-101).
Training Dataset. The detection models are trained
and evaluated on the COCO dataset (Lin et al., 2014)
which consists of 81 classes. The segmentation mod-
els are trained and evaluated on COCO-Stuff (Caesar
et al., 2018) dataset which contains 172 classes - 80
”things” classes, 91 ”stuff” classes, and 1 unlabelled
class. The datasets consist of 118K training images
and 5K validation images. We choose COCO dataset
for our experiments because it is a challenging bench-
mark dataset with common and naturally occurring
real-world scenes, making it suitable for comparative
experiments on dense prediction models.
Training Details. All models are trained on a Tesla
V100 GPU at 512 ×512 resolution using AdamW op-
timizer (Loshchilov and Hutter, 2019) with an initial
learning rate of 5e
−4
, weight decay of 0.05, and a
cosine learning rate scheduler. The networks with
different backbones are trained with different batch
sizes: DeiT-B and RNX-101 with 8, DeiT-S and RN-
50 with 16, and DeiT-T and RN-18 with 32. The de-
tection models are trained for 55 epochs and the seg-
mentation models are trained for 45 epochs. The data
augmentation includes random horizontal flip, ran-
dom crop, and random photometric distortions such
as random contrast ∈ [0.5, 1.5], saturation ∈ [0.5,1.5]
and hue ∈ [−18,+18]. We use Imagenet (Deng et al.,
2009) pretrained weights for initializing all the back-
bones.
Evaluation Metrics. The metrics used to measure
the performance of segmentation (SEG) and detec-
tion (DET) models are mIoU (mean Intersection over
A Comprehensive Study of Vision Transformers on Dense Prediction Tasks
215
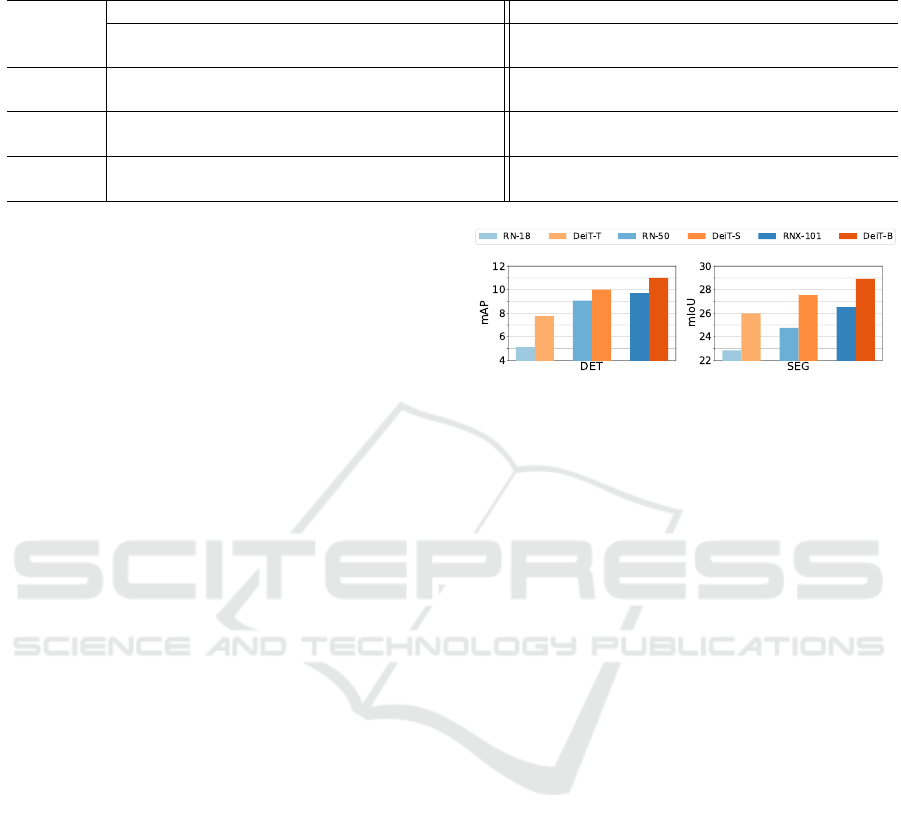
Table 1: Comparison of VTs and their CNN counterparts for object detection on COCO dataset and semantic segmentation
on COCO-Stuff dataset. Best score for each metric is in bold.
Backbone
Detection Segmentation
#Param
(M)
MAC
(G)
Inf.
Time(ms)
mAP
Energy
(kJ)
#Param
(M)
MAC
(G)
Inf.
Time(ms)
mIoU
Energy
(kJ)
RN-18 36 122.34 32.29 26.04 4.6 15 17.76 6.64 30.28 1.7
DeiT-T 30 107.06 41.09 38.19 5.7 11 2.51 11.57 35.08 2.1
RN-50 49 141.00 38.95 39.45 5.3 28 35.02 12.83 35.18 2.4
DeiT-S 49 109.58 46.85 42.56 6.2 28 4.59 18.12 39.79 2.7
RNX-101 114 193.54 60.92 41.20 8.3 93 87.84 27.04 38.02 5.2
DeiT-B 120 116.74 72.33 45.91 9.8 100 12.38 38.14 41.20 6.6
Union) and mAP (mean Average Precision @0.5:0.95
IoU), respectively, unless stated otherwise. In ad-
dition to these accuracy metrics, we report num-
ber of learnable parameters (in millions), Multiply-
Accumulate operations (GMAC) for the architecture,
inference time per image in milliseconds (ms), and
inference energy consumption of a model (in kilo
Joules). We report the average inference time and to-
tal inference energy over 500 samples. All metrics are
calculated at the training resolution.
5 GENERALIZATION
In this section, we probe VTs and CNNs for gener-
alizability to in-distribution and OOD data. We also
investigate the effect of input resolution on general-
ization.
5.1 In-distribution Evaluation
As shown in Table 1, the VT-based object detectors
outperform their CNN counterparts, but at the cost of
inference speed.
Now, MAC represents the computational com-
plexity of the model, and is usually correlated with
the inference speed. Table 1 shows that although VTs
have less complexity than CNNs, they are slower than
CNNs. This might be mainly due to the fact that
GPUs are less optimized for the Transformers (Ivanov
et al., 2020) than CNNs. This could also explain the
higher energy consumption of VTs. Additionally, we
note that the complexity of the largest VTs is less than
that of the smallest CNN (116 vs 122 GMAC). Fur-
thermore, the computational complexity of VTs does
not increase as much as that of CNNs with number of
parameters. Similar to the results for object detection,
the VT-based segmentation models outperform their
CNN counterparts at the cost of inference speed and
energy consumption.
To summarize, VT-based models are more accu-
rate than their CNN counterparts, but the CNN-based
Figure 2: Comparison of VTs and their CNN counterparts
for OOD performance. Object detection models are trained
on COCO and evaluated on BDD100K for 8 classes. Se-
mantic segmentation models are trained on COCO-Stuff
and evaluated on BDD10K for 14 classes.
models are faster and consume less energy. However,
since the VT-based models are less complex, we con-
tend that they can be faster than their CNN counter-
parts if the GPUs are optimized for the VT architec-
tures (Ivanov et al., 2020).
5.2 Out-of-Distribution Evaluation
Despite the good performance of the models on in-
distribution data, it is important to evaluate how well
they perform on unseen data, especially when they
are deployed for real-world applications. The perfor-
mance of the model on such unseen data indicates its
generalizability to OOD datasets.
The detection and segmentation models trained on
COCO and COCO-Stuff are evaluated on BDD100K
(Yu et al., 2020) and BDD10K datasets, respectively.
BDD dataset has a different distribution from that of
COCO since it is composed of road scenes with traf-
fic elements like pedestrians, vehicles, road, and traf-
fic signs. BDD100K for object detection has 10K test
images consisting of 10 classes, out of which, ’rider’
and ’traffic sign’ do not have a corresponding class
in COCO. So, we evaluate the models for 8 match-
ing classes on BDD100K. BDD10K for semantic seg-
mentation, is a subset of BDD100K, with 1k test im-
ages consisting of 19 classes. ’pole’, ’traffic-sign’,
’vegetation’, ’terrain’, and ’rider’ classes do not have
a corresponding class in COCO-Stuff. Thus, we eval-
uate for 14 matching classes and map the COCO-Stuff
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
216
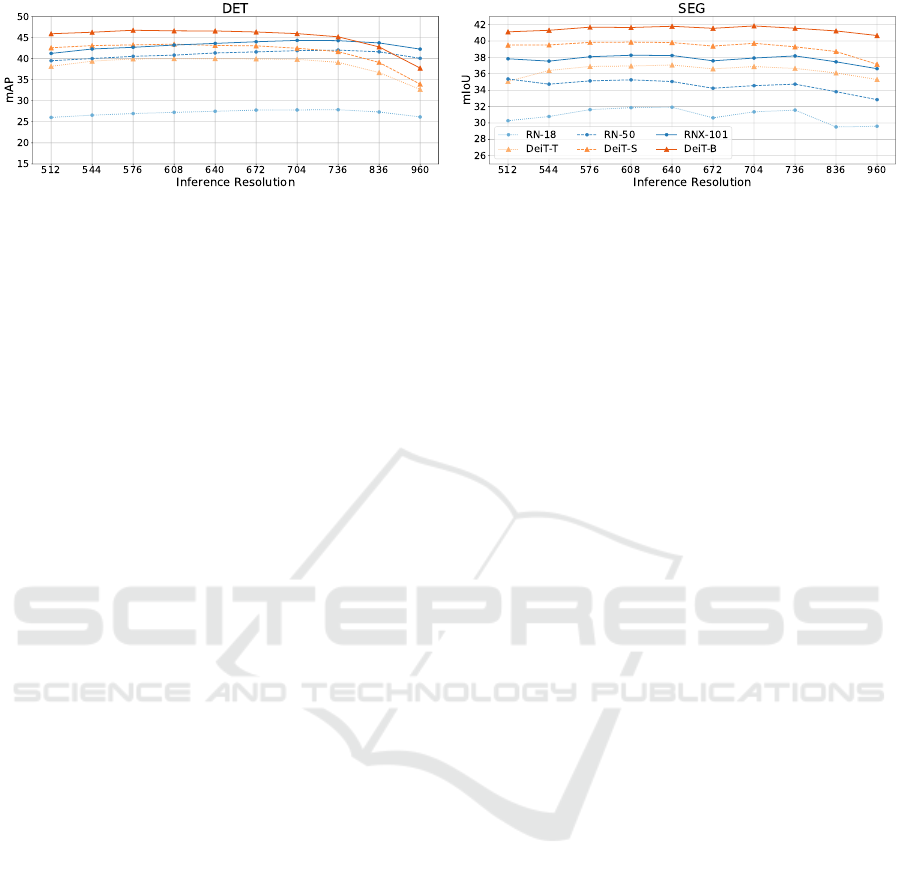
Figure 3: Comparison of VTs and their CNN counterparts at inference resolutions higher than training resolution (512×512).
classes which do not have a corresponding class in
BDD10K to ’unlabeled’ class.
Figure 2 shows that VTs achieve higher perfor-
mance than their CNN counterparts in both tasks.
In segmentation, DeiT-T and DeiT-S also outper-
form significantly larger CNN backbones (RN-50
and RNX-101, respectively). Similarly, in detection,
DeiT-S outperforms RNX-101. These results suggest
that the features learned by the VT backbones are
more generalizable to OOD data. We conduct further
experiments in Section 5.4 to analyze the generaliz-
ability of these models.
5.3 Inference Resolution Study
Given the global receptive field of VTs (Dosovitskiy
et al., 2020), they should be able to handle larger in-
ference resolutions better than CNNs. Although this
has been tested for depth estimation (Ranftl et al.,
2021), it hasn’t been tested for object detection and
semantic segmentation. Therefore, we compare the
detection and segmentation performance of VT and
CNN backbones when inferred at resolutions higher
than the training resolution (512×512).
When inferring at higher resolutions, the patch
size of VTs is fixed at 16×16 resulting in a larger
sequence length. Though Transformer architectures
can handle arbitrary sequence lengths, VTs need in-
terpolation of the position embeddings to adapt to the
new sequence length. We perform bicubic interpo-
lation over the pretrained position embeddings (Tou-
vron et al., 2020). CNNs, on the other hand, can infer
at higher resolutions without any modifications.
Figure 3 shows that, in detection, the performance
degradation at higher resolutions is more gradual for
CNNs as compared to VTs. Consequently, CNNs out-
perform their VT counterparts at higher inference res-
olutions in detection. However, this trend is not ob-
served in semantic segmentation, where higher infer-
ence resolution has similar effect on both CNNs and
VTs, and VTs outperform CNNs at all resolutions.
We believe that this is because the interpolated po-
sitional embeddings might not be as effective for de-
tection as they are for segmentation.
Contrary to the conjecture made by (Ranftl et al.,
2021) for depth estimation, the global receptive field
of VTs does not provide an advantage over CNNs at
higher inference resolutions for detection. This differ-
ence in behaviour of VTs across tasks raises questions
about the cross-task suitability of interpolating the po-
sition embeddings. We leave this analysis for future
work.
5.4 Convergence to Flatter Minima
Analysis
Since there are multiple solutions to the optimization
objective of a model, the local geometry at the conver-
gence point may affect the model’s generalization. It
has been shown that the models that converge to flatter
minima in the loss landscapes are more robust to dis-
tribution shift, and hence more generalizable (Keskar
et al., 2016; Chaudhari et al., 2019). If models find so-
lutions in flatter minima, the performance would not
change significantly when the weights are perturbed.
Meanwhile, if the models converge to sharper min-
ima, even a slight perturbation in the weights could
result in drastic changes in performance.
To analyze the generalizability of the trained mod-
els, we add noise with increasing strengths to their
trained weights. The noise is sampled from a Gaus-
sian distribution with mean 0 and standard deviation
ranging from 0.0 to 0.013 in steps of 0.001. Fi-
nally, we infer these models with perturbed weights
on 20% of the training data. As shown in Figure 4,
although performance of all detection and segmen-
tation models degrades as noise increases, VTs per-
form better than CNNs. It is interesting to note that
in detection, DeiT-S and Deit-T have a sharper de-
cline in performance compared to DeiT-B, whereas
in segmentation, all three VTs have a similar decline.
Moreover, in both tasks, the performance of CNNs
degrades much more sharply than that of the VTs,
with the largest CNN backbone (RNX-101) showing
the sharpest drop. Hence, unlike VTs, an increase in
CNN model-size doesn’t necessarily lead to conver-
gence to flatter minima. The results demonstrate that
A Comprehensive Study of Vision Transformers on Dense Prediction Tasks
217
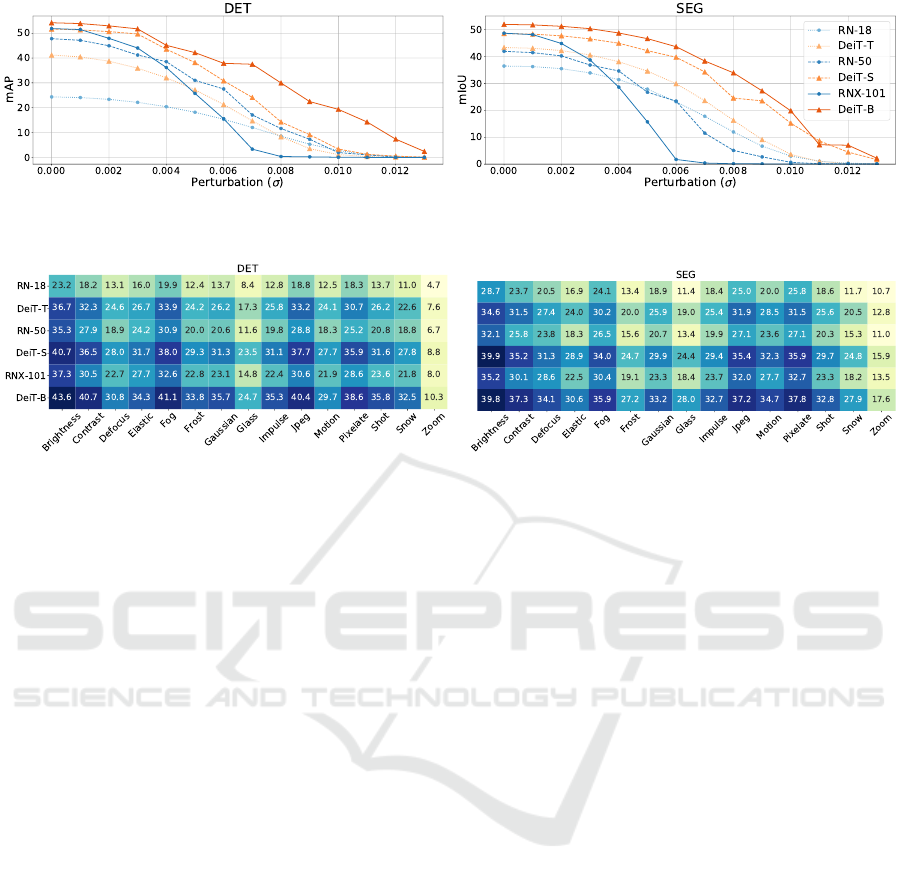
Figure 4: Comparison of train set performance of VTs and their CNN counterparts as a function of Gaussian noise added to
the model parameters.
Figure 5: Performance comparison of VTs and their CNN counterparts under natural corruptions.
VTs converge to flatter minima which could explain
their ability to generalize better to unseen data com-
pared to CNNs as seen in Section 5.2.
6 MODEL CALIBRATION
The neural networks that are being used in safety-
critical applications such as autonomous driving are
expected to be accurate and reliable. Reliable mod-
els are well-calibrated, which means their prediction
confidences and the accuracy of those predictions are
highly correlated. However, recent studies in classi-
fication have shown that highly accurate CNNs are
poorly calibrated (Guo et al., 2017), and VTs are
better calibrated than CNNs (Minderer et al., 2021).
Here, we extend the reliability study of CNNs and
VTs (Minderer et al., 2021) for detection and segmen-
tation and report the results for in-distribution data.
Expected Calibration Error (ECE) and Maximum
Calibration Error (MCE) (Naeini et al., 2015) are
common metrics used to measure the calibration er-
ror of a neural network in classification. ECE is com-
puted by binning the predictions based on the confi-
dence score and taking the weighted mean of the dif-
ference between the average accuracy and confidence
of each bin. MCE, on the other hand, is the max-
imum difference between the average accuracy and
confidence across all bins. We use ECE and MCE
with 15 bins to measure the miscalibration in seg-
mentation models. For object detection, Detection-
ECE (D-ECE) and (w)D-ECE (Kuppers et al., 2020)
are used to measure the calibration error. D-ECE ex-
tends ECE by including the bounding box information
such as coordinates and scale of the bounding box as
additional binning dimensions. (w)D-ECE takes the
weighted average of D-ECE scores with respect to
samples in each class. We use 15 bins, confidence
threshold 0.3, and IoU threshold 0.6 in our analysis.
From the results in Table 2, VTs are better cal-
ibrated than their CNN counterparts in both the
tasks. However, there is no relationship observed be-
tween model-size and calibration within either VTs
or CNNs. Hence, in detection and segmentation, the
calibration of a model is mainly determined by its ar-
chitecture, and not by its size. These observations are
in line with the results in image classification (Min-
derer et al., 2021).
7 ROBUSTNESS
Models deployed in an ever-changing environment
are exposed to natural transformations resulting from
weather, lighting, or camera noise, as well as mali-
cious transformations designed by adversaries to fool
the network. It is therefore important to evaluate the
robustness of the model to natural corruptions and ad-
versarial attacks, especially for safety-critical applica-
tions such as autonomous driving. Thus, we evaluate
the robustness of VTs and CNNs to natural corruption
and adversarial attacks when used as a feature extrac-
tor in detection and segmentation.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
218
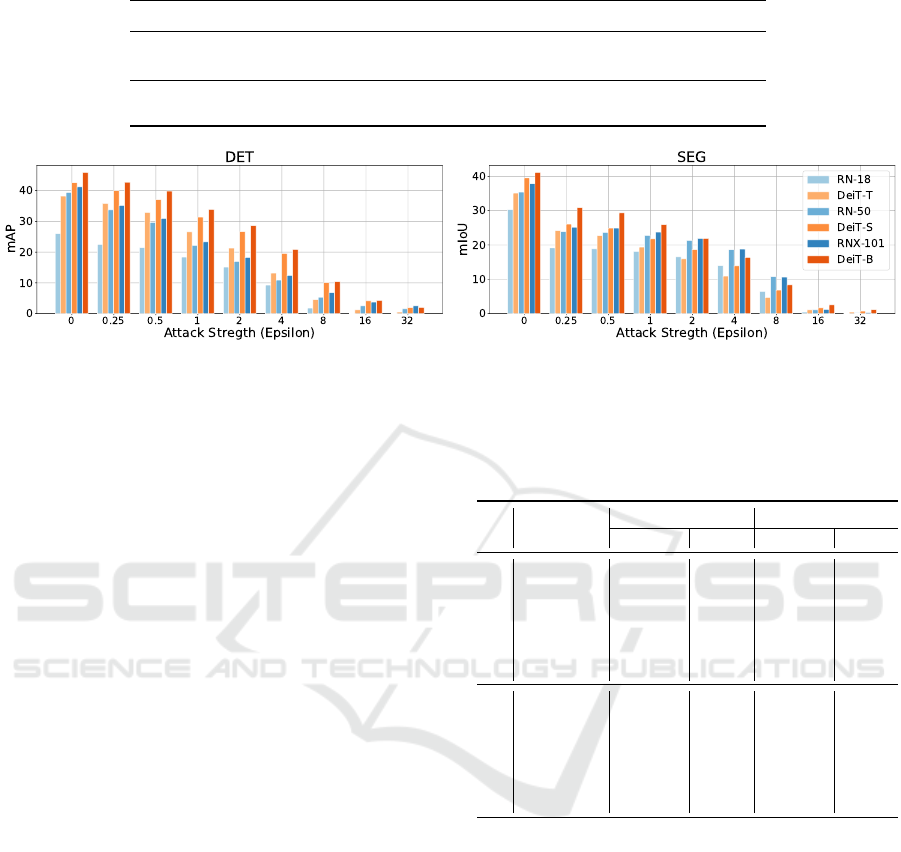
Table 2: Reliability comparison of VTs and their CNN counterparts. Best score for each metric is in bold.
Task Metric RN-18 DeiT-T RN-50 DeiT-S RNX-101 DeiT-B
DET
(w)D-ECE 0.238 0.193 0.200 0.193 0.219 0.165
D-ECE 0.164 0.120 0.145 0.119 0.168 0.094
SEG
ECE 0.157 0.153 0.159 0.158 0.163 0.147
MCE 0.378 0.371 0.389 0.378 0.397 0.369
Figure 6: Performance comparison of VTs and their CNN counterparts under untargeted attack.
7.1 Natural Corruption
To simulate the natural transformations in the real-
world, we apply the 15 common corruptions proposed
by (Hendrycks and Dietterich, 2019) to the valida-
tion set of COCO and COCO-Stuff with severity 3.
We compare the performance of the VTs and CNNs
on the corrupted datasets in Figure 5 and observe
that VTs are more robust than CNNs for both detec-
tion and segmentation. This can be attributed to the
global receptive field of self-attention modules in VTs
that help them attend to salient and far away regions,
making them less susceptible to pixel-level changes
caused by corruptions. Figure 7 further provides a
qualitative comparison of the model predictions for
sample corrupted images.
7.2 Adversarial Robustness
An adversarial perturbation is an imperceptible
change in the input image designed to fool the net-
work (Szegedy et al., 2013) into making a particular
prediction (targeted attack) or a wrong prediction (un-
targeted attack). To generate these adversarial exam-
ples, we use the Projected Gradient Descent (PGD)
attack (Madry et al., 2017) on the classification loss
for both detection and segmentation. We use a step-
size 1 for min(ε + 4,d1.25εe) iterations, where ε is
the attack strength. We conduct the targeted attack by
swapping ‘person’ and ‘car’ classes.
Figure 6 shows the performance of the models un-
der untargetted attack at varying strengths. In detec-
tion, VTs are more robust to adversarial attacks com-
pared to CNNs at all attack strengths. However, in
segmentation, CNNs are more robust at higher attack
strengths. For the targeted attack, Table 3 shows that
Table 3: Relative performance drop in percentage of VTs
and their CNN counterparts under targeted attack, when
’car’ and ’person’ classes are swapped. Best score for each
metric is in bold. The absolute performances are given in
the Appendix (Table 5).
Backbone
‘Person’ ‘Car’
AP/IoU F1 AP/IoU F1
DET
RN-18 1.88 2.84 11.68 9.00
DeiT-T 1.36 2.62 17.30 12.45
RN-50 1.86 3.01 37.59 12.04
DeiT-S 0.89 2.11 17.76 10.54
RNX-101 2.43 2.91 38.47 9.56
DeiT-B 1.32 2.36 20.86 11.74
SEG
RN-18 20.77 13.22 45.98 36.89
DeiT-T 14.83 9.01 44.59 35.17
RN-50 23.88 15.19 49.61 39.88
DeiT-S 6.94 4.01 20.54 14.32
RNX-101 17.15 10.48 39.08 29.92
DeiT-B 7.81 4.53 15.49 10.63
VTs generally retain a higher percentage of their orig-
inal AP and F1 scores compared to their CNN coun-
terparts. We believe that the adversarial robustness
of VTs, like their robustness to natural corruptions,
can be explained by the global receptive field of the
self-attention modules. Moreover, the dynamic na-
ture of the attention modules in VTs makes it harder
for the adversarial attack to find successful gradient
directions to fool the network (Khan et al., 2021). Fig-
ure 8 illustrates the predictions by DeiT-S and RN-50
backbones for a sample targeted attacked image.
8 TEXTURE BIAS
Models which learn global shape-related features of
objects are more robust and generalizable than the
A Comprehensive Study of Vision Transformers on Dense Prediction Tasks
219

Figure 7: Qualitative comparison of Deit-S and RN-50 predictions on sample corrupted images. CNNs predict the wrong
classes and fail to detect objects more often than VTs. For example, under ‘JPEG Compression’ corruption, RN-50 fails to
detect the objects and predicts a wrong class for part of a region in segmentation.
Figure 8: Qualitative comparison of DeiT-S and RN-50
predictions under targeted attack with ‘person’ and ‘car’
classes swapped. RN-50 predicts ‘person’ class for ‘car’
region in detection and segmentation.
ones which rely on the texture of the objects (Geirhos
et al., 2020). Texture and Shape biases (Hermann
et al., 2020) are used to quantify the relative extent to
which the models are dependent on texture and shape
cues in image classification. Here, we extend the tex-
ture and shape bias analyses of VTs and CNNs for
detection and segmentation tasks.
We create a texture-conflict dataset of COCO and
COCO-Stuff by applying rich texture from objects
(such as bear and zebra) as a style to other valida-
tion images containing multiple objects of a single
Figure 9: Qualitative comparison of DeiT-S and RN-50 pre-
dictions when the texture of ‘cup’ class is applied on an im-
age. RN-50 predicts ‘bottle’ and ‘wine glass’, which are
under the same super-category as ’cup’ class.
class. A model is said to predict texture in this texture-
conflict dataset if it predicts the class of the applied
texture. Similarly, the model is said to predict shape
if it predicts the original class despite the change in
texture. For T texture predictions and S shape predic-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
220
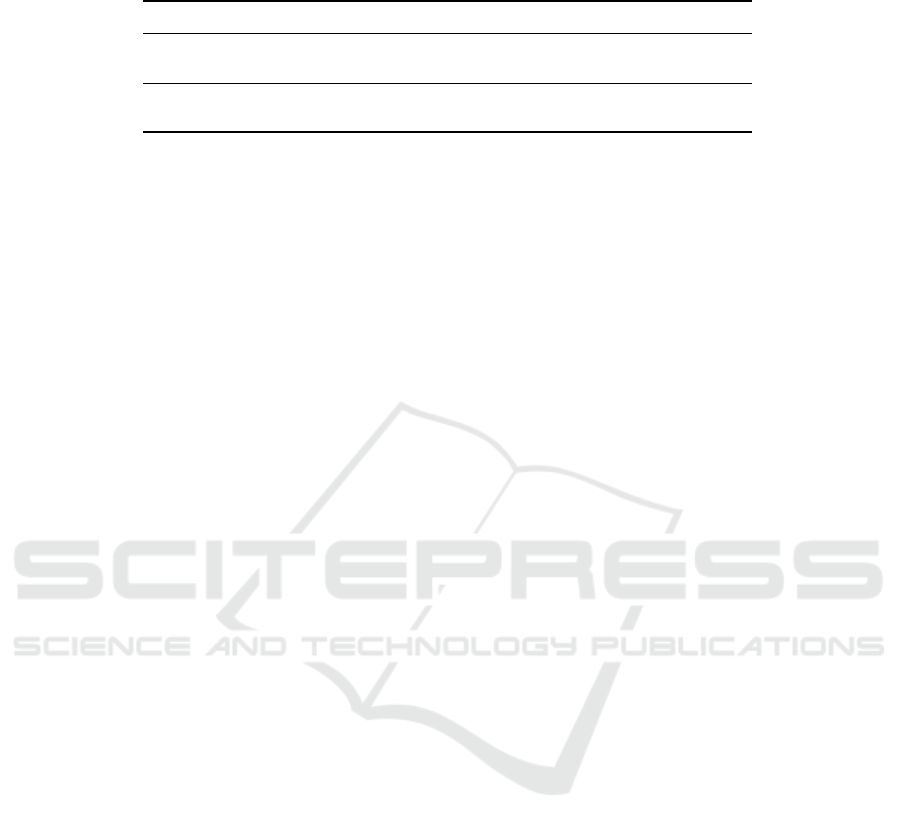
Table 4: Texture-bias of VT and CNN backbones. SC represents the texture bias based on super-category classes. Best scores
are in bold.
Task SC RN-18 DeiT-T RN-50 DeiT-S RNX-101 DeiT-B
DET
- 4.83 3.10 4.19 2.55 3.54 2.42
X 21.98 20.74 21.35 19.81 21.12 19.06
SEG
- 1.64 1.51 1.78 1.53 1.87 1.65
X 8.42 7.05 8.87 7.39 8.26 6.83
tions, the texture-bias is defined as T /(T + S). From
Table 4, we observe that, unlike in classification, the
texture-bias values of the models are low for detection
and segmentation. This is because while the mod-
els do not predict the shape, i.e. the intended class,
they also do not predict the applied texture. However,
from the qualitative analysis in Figure 9, we find that
the predictions and the applied-texture belong to the
same COCO super-category. Therefore, to better re-
flect texture-bias for detection and segmentation, we
use ’Texture bias-SC’, which calculates texture-bias
based on super-categories.
From Table 4, we observe that with this metric,
the models show high texture-bias, which captures
their incorrect predictions. Our results indicate that
VTs are less texture-biased than their CNN counter-
parts. This could be explained by the global recep-
tive field of VTs, which allows for more reliance on
global shape-based cues of objects as opposed to local
texture-based cues. This in turn helps Transformers
to learn the ”intended solution” (Geirhos et al., 2020)
better than CNNs, and thus generalize better to unseen
data.
9 CONCLUSION
We studied different aspects of VTs and CNNs as fea-
ture extractors for object detection and semantic seg-
mentation on challenging and real-world data. The
main results and key insights derived from our exper-
iments are as follows:
• VTs outperform CNNs in in-distribution dataset
while having lower inference speed, but less com-
putational complexity. Hence, if the GPUs are op-
timized for Transformer architectures, they have
the potential to become dominant in computer vi-
sion.
• VTs generalize better to OOD datasets. Our loss
landscape analysis shows that VTs converge to
flatter minima compared to CNNs, which can ex-
plain their generalizability.
• VTs are better calibrated than CNNs, which
makes their predictions more reliable for deploy-
ment in real-world applications. Moreover, we
find that architecture plays the primary role in de-
termining model calibration.
• Although VTs have global receptive field, their
performance degrades for higher image resolu-
tions. We believe that the interpolated positional
embedding might be the reason for their perfor-
mance degradation.
• VTs are more robust to natural corruptions and ad-
versarial attacks compared to CNNs. We believe
that this could be attributed to the global recep-
tive field as well as the dynamic nature of self-
attention.
• VTs are less-texture biased than CNNs, which can
be attributed to their global receptive field, allow-
ing them to focus better on global shape-based
cues as opposed to local texture-based cues.
These results and insights provide a holistic pic-
ture of the performance of both architectures, which
can help the AI community make an informed choice
based on the vision application.
REFERENCES
Bhojanapalli, S., Chakrabarti, A., Glasner, D., Li, D., Un-
terthiner, T., and Veit, A. (2021). Understanding
robustness of transformers for image classification.
arXiv preprint arXiv:2103.14586.
Caesar, H., Uijlings, J., and Ferrari, V. (2018). Coco-stuff:
Thing and stuff classes in context. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 1209–1218.
Chaudhari, P., Choromanska, A., Soatto, S., LeCun, Y.,
Baldassi, C., Borgs, C., Chayes, J., Sagun, L., and
Zecchina, R. (2019). Entropy-sgd: Biasing gradient
descent into wide valleys. Journal of Statistical Me-
chanics: Theory and Experiment, 2019(12):124018.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE conference on com-
puter vision and pattern recognition, pages 248–255.
Ieee.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
A Comprehensive Study of Vision Transformers on Dense Prediction Tasks
221

worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Geirhos, R., Jacobsen, J.-H., Michaelis, C., Zemel, R.,
Brendel, W., Bethge, M., and Wichmann, F. A. (2020).
Shortcut learning in deep neural networks. Nature
Machine Intelligence, 2(11):665–673.
Guo, C., Pleiss, G., Sun, Y., and Weinberger, K. Q. (2017).
On calibration of modern neural networks. In Interna-
tional Conference on Machine Learning, pages 1321–
1330. PMLR.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE Computer Society Conference on Computer
Vision and Pattern Recognition, volume 2016-Decem,
pages 770–778.
Hendrycks, D. and Dietterich, T. (2019). Benchmarking
neural network robustness to common corruptions a
perturbations.
Hermann, K. L., Chen, T., and Kornblith, S. (2020). The
origins and prevalence of texture bias in convolutional
neural networks.
Huang, X. and Belongie, S. (2017). Arbitrary style transfer
in real-time with adaptive instance normalization. In
ICCV.
Ivanov, A., Dryden, N., Ben-Nun, T., Li, S., and Hoe-
fler, T. (2020). Data movement is all you need: A
case study on optimizing transformers. arXiv preprint
arXiv:2007.00072.
Keskar, N. S., Mudigere, D., Nocedal, J., Smelyanskiy, M.,
and Tang, P. T. P. (2016). On large-batch training for
deep learning: Generalization gap and sharp minima.
arXiv preprint arXiv:1609.04836.
Khan, S., Naseer, M., Hayat, M., Zamir, S. W., Khan, F. S.,
and Shah, M. (2021). Transformers in vision: A sur-
vey. arXiv preprint arXiv:2101.01169.
Kuppers, F., Kronenberger, J., Shantia, A., and Haselhoff,
A. (2020). Multivariate confidence calibration for ob-
ject detection. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 326–327.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Springer.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin,
S., and Guo, B. (2021). Swin transformer: Hierarchi-
cal vision transformer using shifted windows. arXiv
preprint arXiv:2103.14030.
Loshchilov, I. and Hutter, F. (2019). Decoupled weight de-
cay regularization.
Madry, A., Makelov, A., Schmidt, L., Tsipras, D., and
Vladu, A. (2017). Towards deep learning mod-
els resistant to adversarial attacks. arXiv preprint
arXiv:1706.06083.
Minderer, M., Djolonga, J., Romijnders, R., Hubis, F., Zhai,
X., Houlsby, N., Tran, D., and Lucic, M. (2021). Re-
visiting the calibration of modern neural networks.
arXiv preprint arXiv:2106.07998.
Naeini, M. P., Cooper, G., and Hauskrecht, M. (2015).
Obtaining well calibrated probabilities using bayesian
binning. In Twenty-Ninth AAAI Conference on Artifi-
cial Intelligence.
Naseer, M., Ranasinghe, K., Khan, S., Hayat, M.,
Khan, F. S., and Yang, M.-H. (2021). Intriguing
properties of vision transformers. arXiv preprint
arXiv:2105.10497.
Paul, S. and Chen, P.-Y. (2021). Vision transformers are
robust learners. arXiv preprint arXiv:2105.07581.
Ranftl, R., Bochkovskiy, A., and Koltun, V. (2021). Vi-
sion transformers for dense prediction. arXiv preprint
arXiv:2103.13413.
Srinivas, A., Lin, T.-Y., Parmar, N., Shlens, J., Abbeel, P.,
and Vaswani, A. (2021). Bottleneck transformers for
visual recognition. arXiv preprint arXiv:2101.11605.
Szegedy, C., Zaremba, W., Sutskever, I., Bruna, J., Er-
han, D., Goodfellow, I., and Fergus, R. (2013). In-
triguing properties of neural networks. arXiv preprint
arXiv:1312.6199.
Tan, M. and Le, Q. (2019). EfficientNet: Rethinking
Model Scaling for Convolutional Neural Networks.
In Chaudhuri, K. and Salakhutdinov, R., editors, Pro-
ceedings of the 36th International Conference on Ma-
chine Learning, volume 97 of Proceedings of Machine
Learning Research, pages 6105–6114. PMLR.
Tian, Z., Shen, C., Chen, H., and He, T. (2019). FCOS:
Fully Convolutional One-Stage Object Detection.
Proceedings of the IEEE International Conference on
Computer Vision, 2019-Octob:9626–9635.
Touvron, H., Cord, M., Douze, M., Massa, F., Sablayrolles,
A., and J
´
egou, H. (2020). Training data-efficient
image transformers & distillation through attention.
arXiv preprint arXiv:2012.12877.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang,
D., Lu, T., Luo, P., and Shao, L. (2021). Pyra-
mid vision transformer: A versatile backbone for
dense prediction without convolutions. arXiv preprint
arXiv:2102.12122.
Yu, F., Chen, H., Wang, X., Xian, W., Chen, Y., Liu, F.,
Madhavan, V., and Darrell, T. (2020). Bdd100k: A
diverse driving dataset for heterogeneous multitask
learning.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
222
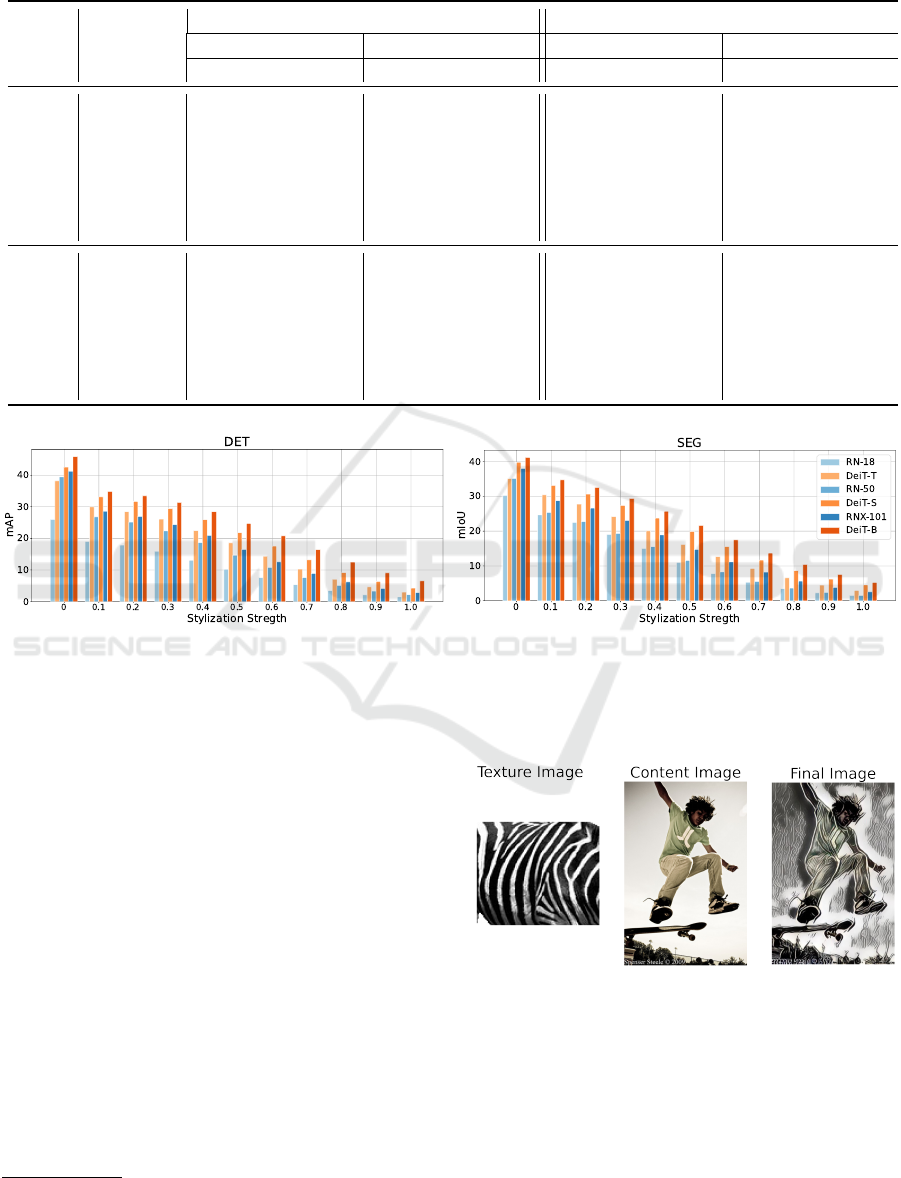
Table 5: The performance of VTs and their CNN counterparts under targeted attack when ’car’ and ’person’classes are
swapped.
‘Person’ ‘Car’
AP/IoU F1 AP/IoU F1
B A B A B A B A
DET
RN-18 0.7855 0.7707 1.0283 0.9991 0.4434 0.3916 0.5523 0.5026
DeiT-T 0.8705 0.8587 1.0766 1.0484 0.5833 0.4824 0.6915 0.6054
RN-50 0.8998 0.8831 1.0910 1.0582 0.6457 0.4030 0.7600 0.6685
DeiT-S 0.8949 0.8869 1.1048 1.0815 0.6436 0.5293 0.7525 0.6732
RNX101 0.9042 0.8822 1.0920 1.0602 0.6543 0.4026 0.7623 0.6894
DeiT-B 0.9090 0.8970 1.1238 1.0973 0.6798 0.5380 0.7983 0.7046
SEG
RN-18 0.7206 0.5709 0.8375 0.7268 0.4569 0.2468 0.6272 0.3958
DeiT-T 0.7578 0.6454 0.8621 0.7845 0.4817 0.2669 0.6499 0.4213
RN-50 0.7516 0.5721 0.8581 0.7277 0.4838 0.2438 0.6521 0.3920
DeiT-S 0.7785 0.7245 0.8753 0.8402 0.5457 0.4336 0.7060 0.6049
RNX101 0.7705 0.6383 0.8703 0.7791 0.5025 0.3061 0.6688 0.4687
DeiT-B 0.7899 0.7282 0.8826 0.8426 0.5395 0.4559 0.7008 0.6263
Figure 10: Performance comparison of VTs and their CNN counterparts on stylized validation sets with increasing stylization
strength.
APPENDIX
COCO Texture Stylization for Dense
Prediction Tasks
Here, we conduct an additional study on texture-bias
of VTs and CNNs. For this, we apply a random tex-
ture from an object to every image in the COCO vali-
dation set with increasing strength of stylization using
AdaIN-style (Huang and Belongie, 2017)
1
. A texture
is applied only if the source object is not present in the
target image. Figure 11 shows an example of applying
a texture of a zebra on an image. Figure 10 demon-
strates that VTs continue to rely less on texture-cues
compared to CNNs at all stylization strengths. This
is in line with our results in Section 8. The higher
performance of VTs over CNNs with increasing styl-
ization strength is also indicative of their higher ro-
1
https://github.com/xunhuang1995/AdaIN-style
bustness to distribution shifts.
Figure 11: Texture stylization of an image with person and
skateboard with texture of zebra, at stylization strength 0.4.
A Comprehensive Study of Vision Transformers on Dense Prediction Tasks
223
