
ALP4AI: Agent-based Learning Platform for Introductory Artificial
Intelligence
Ramoni O. Lasisi, Connor Philips and Nicholas Hartnett
Department of Computer and Information Sciences, Virginia Military Institute, U.S.A.
Keywords:
Artificial intelligence, Agent, Search, Algorithm, Visualization, Experiments.
Abstract:
We develop ALP4AI, an Agent-based Learning Platform for Introductory Artificial Intelligence. ALP4AI is a
graphical-based tool that is suitable for teaching introductory AI, places emphasis on hands-on learning, and
provides for visualization of results. The tool we have developed is suitable for solving problems in the state
space search problem domain. It provides for different environments modeling, including, environments that
contain obstacles or are obstacle-free, single or multi-agent, and contains single or multi goals. Students can
also conduct and report results of experiments using ALP4AI. This project is expected to provide a new frontier
of a simple, yet theoretically grounded hands-on learning tool with visualization to aid in AI education and
provision of vast resources that benefit the academic community.
1 INTRODUCTION
There has been much emphasis on hands-on and ex-
periential learning in undergraduatecomputer science
education including computer programming (von
Hausswolff, 2017) and artificial intelligence (Par-
sons and Skiar, 2004), (Bryce, 2011), (Perhinschi,
2017). We designed and implemented a learning tool
in artificial intelligence (AI) tagged, ALP4AI: Agent-
based Learning Platform for Introductory Artificial
Intelligence. The idea to develop this tool was con-
ceived by one of the authors after teaching several
sections of the introductory AI course to undergrad-
uates at a four-year college in the United States. Stu-
dents in the course typically have completed two
semesters of introductory programming and have ex-
posure to a data structures course. Topics for the
course were selected from the widely used AI text-
book: Artificial Intelligence - A Modern Approach,
Third Edition (Russell and Norvig, 2010).
Our goals in developing this tool on one hand is to
enhance experiential learning for students, and on the
other, aid in course delivery for instructors in teaching
the introductory AI course. While our tool would be
applicable to a wide range of domains and topics in AI
education, as a case study we demonstrate its applica-
tion to problem solving as search in this paper. By de-
sign, the developed tool is reconfigurable, extensible,
and adaptable; thus, providing opportunities for fac-
ulty and students to research, design, build, and test
pluggable modules for intelligent agents’ strategies,
single and multi-agent search, and conduct appropri-
ate experimentations and evaluations.
To develop the tool, we design and implement
an agent class. Agents in our work are modeled to
provide internal representation of the world state-
space to find paths to goals. We also implement a
GUI-based two-dimensional representation of a prob-
lem solving environment that allows for visualization
of agents’ movements, interactions, and results. The
tool showcases a grid-styled environment consisting
of cells that can hold an agent, a goal, nothing,
or an obstacle. The cells that hold nothing are free
spaces for an agent to move through as it searches
for goals. All cells are passable except the cells with
obstacles. ALP4AI is built to aid in teaching, thus al-
lowing students to add new features and functionali-
ties to the environment. The adaptability of the tool
allows for it to be used such that the teacher controls
what the students have access to and what they need
to make for themselves.
The following is our working hypothesis:
Students are likely to have intuitive recognition
and be enthusiastic to use and implement arti-
ficial intelligence algorithms presented using a
graphical-based tool that provides for visualiza-
tion of results, and places emphasis on hands-on
learning.
842
Lasisi, R., Philips, C. and Hartnett, N.
ALP4AI: Agent-based Learning Platform for Introductory Artificial Intelligence.
DOI: 10.5220/0010916100003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 842-850
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
Many traditional methods of teaching computer
science topics including AI algorithms in most part
provide description of the methods and use some data
to illustrate the functionalities of these ideas. These
descriptions may in some cases be followed with lim-
ited visualization of the steps involvedbefore students
are asked to provideimplementationsof the ideas. Ex-
amples using this approach abound in many computer
science books such as those used in introductory pro-
gramming courses, data structures, algorithms, and
AI. One concern about this approach is that some
of these important topics in the field of AI are so-
phisticated and are difficult concepts for lower level
undergraduate students to easily and clearly compre-
hend. Further to this, and in accordance with (Ju-
lian Estevez and Grana, 2019), “There is a wide con-
sensus among computer scientists that it is quite diffi-
cult to teach the basics of AI.” Another issue of con-
cern is how much of the knowledge gained from us-
ing this approach is retained, and can be applied when
students are faced with new problems from different
domains than they have been exposed?
There have been several attempts in the litera-
ture to address this concern using hands-on learn-
ing approaches to teaching AI algorithms. (Parsons
and Skiar, 2004) use LEGO Mindstorms in teaching
AI. The approach utilized in this work is more to-
wards students being able to program the robots and
as well test out some of the functionalities while en-
gaging in contests among the project groups. Thus,
their approach is not towards formulating problems
or implementing AI solutions or algorithms. In a dif-
ferent hands-on method, (Bryce, 2011) uses a project-
based approach in the game of Wumpus World (WW)
to teach introductory AI concepts. Description of
the WW environment can be found in (Russell and
Norvig, 2010). Students are required to implement
search, satisfiability, and declarative planning de-
scriptions algorithms applied to the WW environment
of different sizes. As interesting as the WW project
is, it only provides for a single agent in the environ-
ment. Having a multi-agent environment with multi-
ple goal states would not only be interesting, but will
also provide further challenges to students. It will also
open up new possibilities to seeing how different al-
gorithms work in such more complex and diverse en-
vironments.
Another work on introductory AI by (McGovern
et al., 2011) uses Java-based games. Although the
games here are graphical and also have elements of
multi-agent environments, two of the three projects
will have students implement several variants of A
∗
algorithms. Finally, we looked at a related course that
uses the Pac-Man game to illustrate the introduction
of AI algorithms (DeNero and Klein, 2010). In this
course, students are required to implement various al-
gorithms to solve problems in the Pac-Man domain.
In contrast to the works above, our emphasis in
this work is to build a tool that provides not only
hands-on and experiential learning to implement ba-
sic AI algorithms as many of the works cited did, but
also to teach students the process of problem formu-
lation and development of solutions that students can
be able to apply to new problem domains in future
courses or careers. We have developed ALP4AI to be
simple with little learning curve. Thus, students do
not need several hours of study or class periods to
understand the details of and how to use the simu-
lator. The tool makes provision for several functional-
ities that students can use to model different AI prob-
lems and develop their solutions.
2 DESIGN METHODOLOGY
2.1 The Problem Environment
We provide a description of the problem environment
that our agent-based learning platform is based. The
framework is situated in a two-dimensional grid
that represents the environment that agents are re-
quired to explore. Agents are given the task of lo-
cating goals that are randomly placed in the envi-
ronment. Goals represent desirable states that agents
need to achieve. Many interesting problems in intro-
ductory AI, including the state space search used to
illustrate the functionalities of ALP4AI, can be mod-
eled using this environment.
Figure 1: The TruckAgent.
We use JavaFX technology to build a GUI plat-
form that aids students in visualizing agents’ move-
ALP4AI: Agent-based Learning Platform for Introductory Artificial Intelligence
843

ment, interactions, and results in the environment. We
first design and implement our agent tagged TruckA-
gent. See Figure 1. This is followed by creating GUI
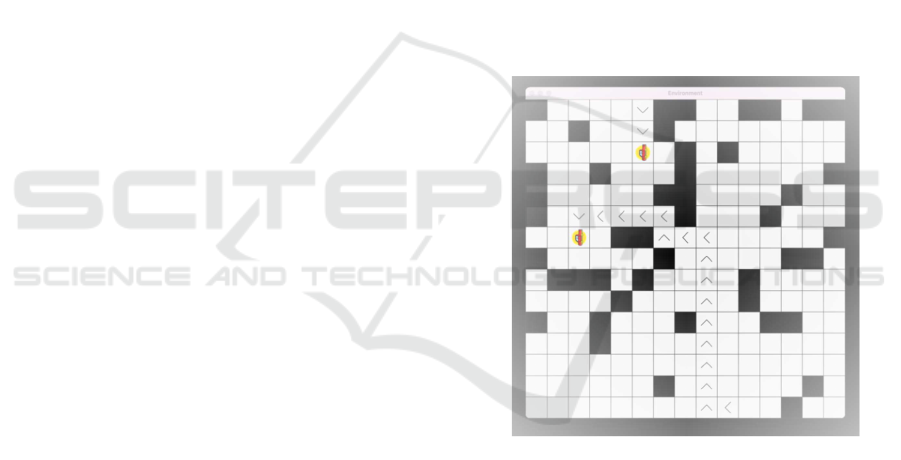
for a two-dimensional grid that represents the agents’
environment. Some cells in the grid contain goals de-
noted by gold coins. These cells represent goal states
that agents are attempting to reach. The impassable
cells (i.e., obstacles) in the environment are denoted
by black squares. See Figure 2.
Figure 2: A 15× 15 environment with one agent, one goal,
and 45 obstacles.
ALP4AI allows for parameterization to generate
varieties of problem environments. Different environ-
ments that can be defined among others, include sin-
gle or multi-agent environments, environments with
single or multiple goals, and with obstacles or no ob-
stacles. Environments are further systematically or-
ganized into states so that agents can intelligently
navigate them. The idea of using states to organize
environments is fundamental to understanding basics
of problems formulation in introductory AI. Further-
more, the state-space search problem that we consider
in this work requires an understanding of the concept
of states and states’ successors to formulate prob-
lems.
2.2 Search Infrastructure
After developing the agent, environment, and the dif-
ferent types of cells it contains, we then focus on the
search algorithms’ infrastructure required by agents
to navigate the environment.We define the abstraction
of the world (i.e., the environment) that an agent is
currently in as a state. For example, suppose a Truck-
Agent is at location (x
1
, y
1
) in a two-dimensional grid
environment and facing the north direction, that de-
scription of the environment corresponds to a certain
state say, s
1
for the agent. However, the agent is per-
ceived to be in a different state, say s
2
, if it remains
in the same location but now facing the west direc-
tion. Thus, state s
1
is not the same as s
2
.
The TruckAgent is armed with certain actions that
it can perform in different states of the world. Possi-
ble actions include, goForward, turnRight and turn-
Left. Agent’s actions are only applicable in a state if
the preconditions for the actions are satisfied. For ex-
ample, it is not possible to go forward when the agent
is facing an impassable cell, thus the action goFor-
ward is not applicable in this state. Each action has a
step cost, and the step costs of a state and its parent
add up to a path cost up to that state.
Note that the concept of a state is an abstract de-
scription of the world that the TruckAgent is currently
in. To provide a concrete description of a state, we im-
plement a node data structure that describes informa-
tion contained in a state. Some data members in the
node data structure are:
• parentNode - a node representing the parent’s
state of the current node
• parentAction - the action taken to reach the cur-
rent state from the parent state
• pathCost - the total number of steps taken by the
agent from the root node (where the agent started)
to the goal node
• action list - a list of actions taken from the root
node to the goal state (if found) or the last place
the agent searched (if no goal state exist)
It is noteworthy to know the distinction between a
state and its corresponding node.
Students will first be required to implementa tran-
sition model or successor function for the state-space
search framework. Let s be a state that a TruckA-
gent is currently in; we define the successor states
as the possible states that the agent can transits from
s. Given a particular state of a TruckAgent and the set
of possible actions by the agent, the successor func-
tion computes and returns the successor states for the
current state. The node that corresponds to the given
state is thus said to have been expanded. The succes-
sor nodes also correspond to different valid successor
states that the agent can transit to. One essential skill
that is expected to be gained here is the understanding
of the concept of a node in a tree and how it relates to
the abstraction of a state in an environment.
2.3 Problem Formulation
The following is the formal problem formulation that
we used to model the state-space search problem that
we consider in this work:
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
844
• States: A state is a combination of a cell (identi-
fied by its location) in the two-dimensional grid
environment and the direction (i.e., north, east,
west, or south) that a TruckAgent is facing. In this
type of setting, each cell has four states.
• Initial State: Agents are randomly placed in a
state in the environment when starting a new
world. So any state in the environment may be
designated as the initial state. However, in order to
allowfor repeatable experimentsthat can compare
performance of search strategies, we also make
provisions for placing agents and goals in desired
starting states of the environments.
• Actions: The TruckAgent is equipped with the
following three actions: goForward, turnLeft, and
turnRight. Each of these actions places the Truck-
Agent in the successor state if the action is ap-
plicable in the current state. Note that both of the
actions turnLeft and turnRight are applicable in
all states. Although the location of the agent re-
mains the same for both actions, the direction of
the agent is modified to that of the new state. On
the other hand, the action goForward places the
agent in a different state with a different location
when the action is applicable in the current state.
• Transition Model: Appropriate transition mod-
els (also referred to as successor functions) that
agents can use to select successor states are de-
veloped. Given a particular state of a TruckAgent
and the set of possible actions for the agent, the
successor function computes and returns the suc-
cessor states for the current state.
• Goal Test: When an agent is initially placed in a
state or navigates to a new state based on the result
of the successor function, the agent checks to see
if the state it is currently in is a goal state.
• Path Cost: The total number of steps by an agent
in a path defines the path cost. Each step costs 1.
3 SEARCH ALGORITHMS
The ALP4AI tool allows for the implementation of
search algorithms using uninformed and informed
search strategies where a TruckAgent navigates the
environment to reach a goal state (i.e., finding
the gold coin). It also supports implementation for
multi-agent and multi-goal environments. Some un-
informed search algorithms supported by ALP4AI in-
clude Breadth First Search (BFS), Depth First Search
(DFS), Iterative Deepening Depth First Search (ID-
DFS), and Uniform Cost Search (UCS). Additional
support to implement informed search strategies in-
cluding Greedy Best First Search (GBFS) and A*
Search algorithms is provided.
3.1 Uninformed Search Algorithms
The first of the five uninformed search algorithms im-
plemented in ALP4AI is the BFS. A queue implemen-
tation of the BFS algorithm is achieved. The first node
that is inserted into the queue is the first to be removed
for expansion. The successors of this node are then
added to the back of the queue since they are at a dif-
ferent depth than their parent. Thus, the BFS algo-
rithm searches all nodes at a particular depth before
increasing the depth. For instance, the BFS algorithm
will search all nodes at a certain depth, say 3 and ex-
pand on those nodes before searching at depth of 4
and their expanded nodes.
Figure 3 is an illustration of two agents utilizing
the BFS algorithm to find goals. The path taken by
each agent is shown with arrow-heads.
Figure 3: Two TruckAgents utilize a BFS algorithm on a
15×15 grid size with two goals and 45 obstacles.
The next search algorithm implemented is the
DFS algorithm which uses a stack data structure to
search and expand nodes. The last node that is pushed
into the stack is the first to be removed for expan-
sion. The successors of this node are then added to the
top of the stack since we intend to explore a particu-
lar path until reaching a leaf node. This implemen-
tation searches a branch of the nodes before search-
ing through the next branch. Because this method will
continue to search until a goal is found or not, the
number of actions required to reach the goal is rel-
atively high. Figure 4 illustrates an agent utilizing
a DFS to search the two-dimensional grid environ-
ment. As seen from the figure by the directions of the
ALP4AI: Agent-based Learning Platform for Introductory Artificial Intelligence
845

arrow-heads, the agent took more steps than necessary
to reach the goal state.
Figure 4: One agent utilizes a DFS algorithm on a 15× 15
grid size with two goals and 45 obstacles.
The DLS also utilizes a stack data structure but
implements a limit to the number of actions an agent
can perform. Once the tree of nodes has been tra-
versed down a branch to a given depth limit, the
search will then start with the next branch. Because
of this limit, it is possible with a DLS that no goal
will be found, however may usually find goals with
less actions than a DFS. Figure 5 illustrates a DLS
algorithm in action.
Figure 5: One agent utilizes a DLS algorithm on a 15× 15
grid size with two goals and 45 obstacles with a limit of 25
steps.
The IDDFS is implemented next. A stack imple-
mentation of the DLS algorithm is first achieved. The
DLS performs depth first search at a particular depth
specified by the IDDFS to determine if the goal state
exists at that depth. Otherwise, IDDFS increases the
depth and repeat a new DLS search. For example, the
search algorithm will search to a depth of 1, if no goal
is found the search will restart and search to a depth of
2. If no goal is found still, then this process will con-
tinue until goal is found or not. The iterative pattern
allows the agent to find the goal in less steps than all
previous search that uses the stack data structure. Fig-
ure 6 illustrates the IDDFS algorithm in action.
Figure 6: Two agents utilize IDDFS algorithm on a 15×15
grid size with two goals and 45 obstacles.
The last uninformed search algorithm imple-
mented is the UCS which uses a priority queue data
structure to search the environment. A priority queue
which uses the path cost as comparator is main-
tained. The node having the least path cost thus far
is removed next to be expanded in order to advance
the search. If no goal is found, then the process will
continue. This data structure will result in low path
costs for the node due to the lowest path cost node
being removed and expanded first. Figure 7 illustrates
the UCS algorithm in action.
3.2 Informed Search Algorithms
We implement the following two informed search
strategies: GBFS and A
∗
search algorithms while us-
ing heuristic functions, h(n) and g(n). The n in the
function represents a node reference in the func-
tion. We first implement the well-known straight line
distance heuristic described next.
Let (x
i
, y
i
) and (x
j
, y
j
) define the cartesian co-
ordinates of the TruckAgent and goal cell respec-
tively in the environment. The straight line heuristic
is defined as the euclidean distance between the two
points. Specifically, the value of the heuristic, denoted
h(n) is computed as follows
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
846
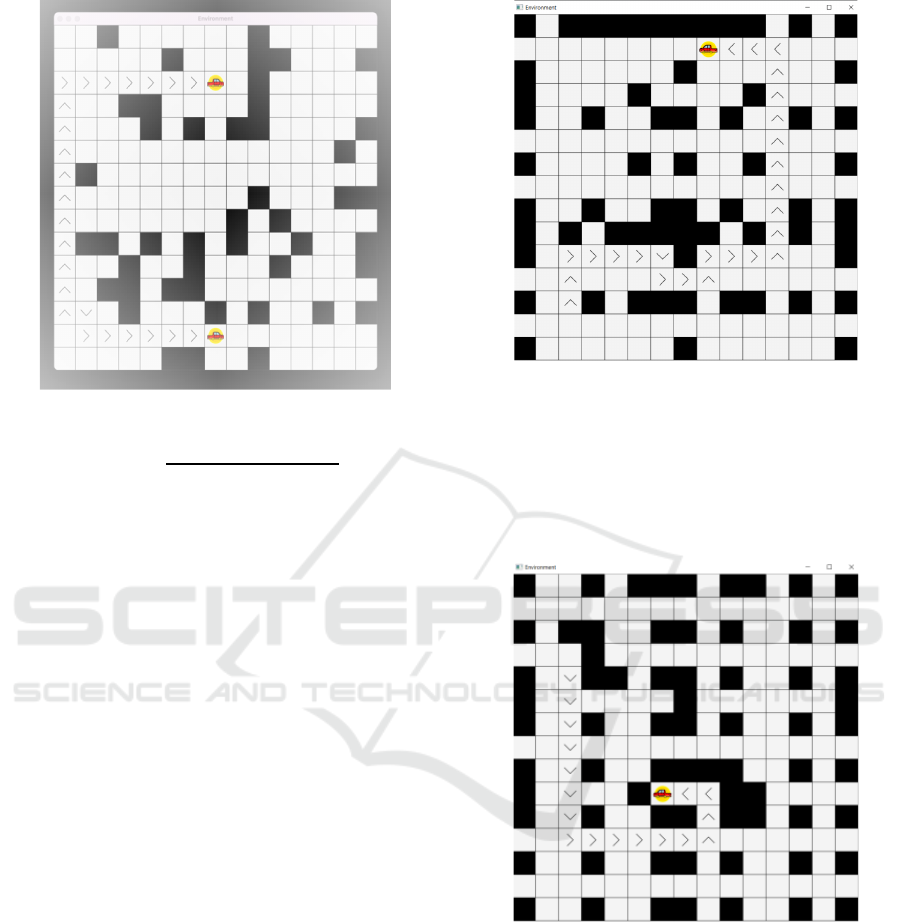
Figure 7: Two agents utilize a UCS algorithm on a 15× 15
grid size with two goals and 45 obstacles.
h(n) =
q
(x
i
− x
j
)
2
+ (y
i
− y
j
)
2
.
The value h(n) is the estimated distance of a node,
n, relative to the goal node. Furthermore, we define
another function f(n) while using the A
∗
search algo-
rithm as follows:
f(n) = h(n) + g(n)
where
g(n) = path cost thus far.
A priority queue implementation of the GBFS is
achieved. A priority queue is maintained which uses
the heuristic function h(n) as comparator for the pri-
ority queue. The node having the least h(n) value is
usually removed next to be expanded with the inher-
ent knowledge that the selected nodes lead to solution
quickly. If no goal is found in adjacent nodes in the
two-dimensional grid environment, then the process
continues. This strategy typically results in low path
costs. Figure 8 illustrates the GBFS algorithm in ac-
tion.
The second informed search strategy is the A
∗
search algorithm. The implementation is similar to
the GBFS except that we set the heuristic function as
f(n) = h(n) + g(n), where g(n) is path cost from the
start node to the current node n, and h(n) is the value
of the heuristic that is used to estimate the cost from
the current node n to the goal state. This algorithm op-
erates using a priority queue data structure to search
the environment. The algorithm selects the next node
as the one with the smallest h(n)+g(n) value. The al-
gorithm always estimate the distance to the goal cell
while minimizing excessive cost. If no goal is found
Figure 8: One agent utilizes a GBFS algorithm on a 15×15
grid size with one goal and 45 obstacles.
in adjacent nodes, then this process continues. The
strategy always results in minimal path costs because
it factors in the total path cost from the start node to
the goal node in its heuristic function. Figure 9 illus-
trates the A
∗
search algorithm in action.
Figure 9: One agent searches utilizing A* search algorithm
on a 15×15 grid size with one goal.
4 RESOURCES
We have explored the idea of problem solving as
search in this work and provided detailed description
of the process of the developmentand implementation
of classical search algorithms that students encounter
in an introductory AI course using the ALP4AI learn-
ing platform. Our approach is to provide students
with only the ALP4AI game engine and the search in-
ALP4AI: Agent-based Learning Platform for Introductory Artificial Intelligence
847

frastructure that supports the development and imple-
mentation of these search algorithms. Thus, students
will be required to provide their own implementations
of the search algorithms, conduct experiments using
specified setups, and compare their results with the
experimental results described in Section 5.
In addition to making the game engine and the
search infrastructureavailable to the students, we pro-
vide and describe the following supplement resources
that aid the students to seamlessly use the tool.
4.1 Seed Generation
The environments that the TruckAgent operates on
and upon which the search algorithms are devel-
oped are designed to be randomly generated using
unique seeds. Seeds are used to ensure consistency
with how and where obstacles and goal states are
placed in the environments, thus facilitating oppor-
tunities for repeatable experiments. The seed gener-
ation is designed to be scalable so the grid size can
be changed with patterns of the obstacles remaining
the same. These seeds allow for experimentation to
remain consistent across different search algorithms.
ALP4AI currently has 15 seeds corresponding to
15 different patterns that are unique in the environ-
ments. Some seeds are solvable by the TruckAgent,
i.e., the agent can reach the goal, while some are
not. These environments that are not solvable pro-
vide additional performance measures for search al-
gorithms to be evaluated when there are no goals
found. Figures 10 and 11 provide two environment
examples for seeds 7 and 10, respectively.
Figure 10: Two-dimensional 15× 15 grid environment gen-
erated from seed 7.
Figure 11: Two-dimensional 15× 15 grid environment gen-
erated from seed 10.
4.2 Documentation
There are currently 24 Java and JavaFX classes in the
project organized into five packages:
• ClassicalSearch
• Experiments
• GameEngine
• SeedGeneration
• Infrastructure
To seamlessly be able to bring students to speed
in order to understand what each of the classes does
and use it, we provide detail documentation for these
classes. The documentation comes in the form of a
UML diagram for a class followed by a brief descrip-
tion of the class, and explanations of the methods
(functions) in the class. See the Appendix for sam-
ple documentation of the TruckAgent and Location
classes implemented in the ALP4AI tool.
5 EXPERIMENTS AND RESULTS
We conduct experiments on the search algorithms
in the ALP4AI’s two-dimensional grid environ-
ment. This section compares the performance of the
search algorithms (uninformed and informed search
strategies) considering different grid dimensions and
seeds. The comparisons are performed under the fol-
lowing headings: number of nodes expanded, time to
complete search in milliseconds, total time to com-
plete search in milliseconds, and number of actions
taken by agents. The number of nodes expanded is
useful in understanding the amount of the tree that
was searched before a goal is found. The time for
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
848
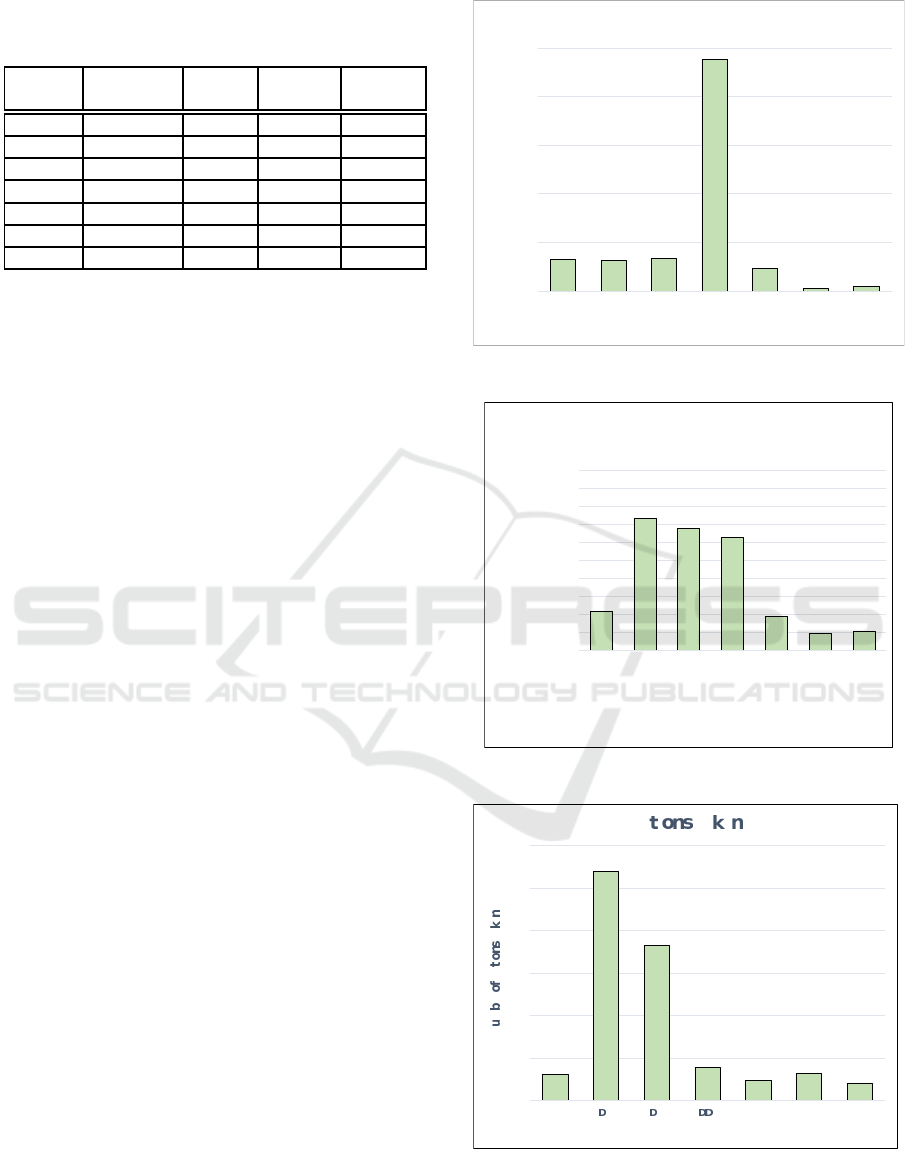
Table 1: Data set of a single agent, time were recorded in
milliseconds. Data collection was obtained using an intel i5
8th generation 4 core processor.
Search Expanded Search Actions Total
Type Nodes Time Taken Time
BFS 321.4 43.6 15.2 7664.8
DFS 313.7 147.2 134.9 47346.4
DLS 332.9 136 91.6 45990.5
IDDFS 2386.2 125.4 19.4 9851.3
UCS 230.5 37.7 11.7 5909.6
GBFS 23.4 18.9 16 8041.3
A
∗
43.6 20.9 10.4 5239.7
search is important in understanding the difference in
efficiency of the searches in terms of time taken. The
total time takes into account the actions taken by the
agent and difference in efficiency. The number of ac-
tions taken by an agent differs greatly among the
searches.
Sets of data were collected from fixed environ-
ments. The data was compiled and then evaluated
to find the average for each of the four main data
sets: number of nodes expanded, time to complete the
search in milliseconds, total time to complete in mil-
liseconds, and number of actions taken by agent. Ta-
ble 1 shows the results of the experiment.
When comparing the uninformed search strategies
the data shows UCS to be the most efficient in all cate-
gories of recorded averages. The closest search strate-
gies among the uninformed searches is the BFS. The
DFS and DLS were the least efficient in terms of time
to complete. Furthermore, the IDDFS is the least effi-
cient by a large margin in expanded nodes.
Between the two informed searches involved in
the experiment, the A
∗
search is the most efficient in
actions taken and total time used. The GBFS how-
ever had a lower average search time and lower num-
ber of expandednodes.Overall, when comparing both
the informed and uninformed searches the GBFS and
A
∗
hold the most efficient averages of all searches in-
volved in the experiment. The visualizations for the
data are depicted in the four bar graphs in Figures
12− 15.
6 CONCLUSIONS AND FUTURE
WORKS
We develop ALP4AI, an Agent-based Learning Plat-
form for Introductory Artificial Intelligence. The tool
we have developed is suitable for solving problems in
the state space search problem domains. ALP4AI al-
lows for parameterization of the environments.Differ-
ent parameters that can be defined include provisions
321.4
313.7
332.9
2386.2
230.5
23.4
43.6
0
500
1000
1500
2000
2500
BFS DFS DLS IDDFS UCS GBFS A*
Number of Expanded Nodes
Search Type
Expanded Nodes
Figure 12: Number of Expanded Nodes.
43.6
147.2
136
125.4
37.7
18.9
20.9
0
20
40
60
80
100
120
140
160
180
200
BFS DFS DLS IDDFS UCS GBFS A*
Search Time (MS)
Search Type
Search Time
Figure 13: The Search Time.
15.2
134.9
91.6
19.4
11.7
16
10.4
0
25
50
75
100
125
150
BFS FS LS I FS UCS GBFS A*
N m er Ac i Ta e
Search Type
Ac i Ta e
Figure 14: Number of Actions Taken.
ALP4AI: Agent-based Learning Platform for Introductory Artificial Intelligence
849

7664.
47346
45990
9
51.3
5909.6
041.3
5239.7
0
6000
12000
18000
24000
30000
36000
42000
48000
BFS
FS LS I FS UCS GBFS A*
T a Time (MS)
Search Type
T a Time
Figure 15: Total Time Taken.
for single or multi-agent environments, presence of
single or multi-goal, and obstacle-free or obstacles-
present environments.
The outcomesof this research are expectedto have
a high positiveimpact in enhancingexperientiallearn-
ing in computer science education as a whole, and AI
course delivery in particular. This project is expected
to provide a new frontier of a simple, yet theoretically
grounded hands-on learning tool with visualization to
aid in AI education and provision of vast resources
that benefit the academic community. This will be im-
pactful for helping students see exactly how each al-
gorithm developed by students to control the agents
behaves. The outcomes are expected to aid faculty in
the teaching of AI and related courses in schools.
Having evaluated the functionality of the ALP4AI
tool for its technical functionality, future work will
involve the evaluation of the relevancy of the tool
for teaching introductory AI courses. Surveys will be
conducted and data collected of the usage of the tool
in teaching AI in the classrooms. Further future work
will include the extension of the functionality of the
tool to other problem domains in AI, such as reason-
ing using propositional and first order logics.
REFERENCES
Bryce, D. (2011). Wumpus world in introductory artificial
intelligence. In Consortium for Computing Sciences
in Colleges, pages 58–65.
DeNero, J. and Klein, D. (2010). Teaching introductory
artificial intelligence with pac-man. In Symposium on
Educational Advances in Artificial Intelligence.
Julian Estevez, Gorka Garate, L.-G. and Grana, M. (2019).
Using scratch to teach undergraduate students’ skills
on artificial intelligence. In arXiv:1904.00296. [On-
line]. Available: https://arxiv.org/abs/1904.00296.
McGovern, A., Tidwell, Z., and Rushing, D. (2011). Teach-
ing introductory artificial intelligence through java-
based games. In Second Symposium on Educational
Advances in Artificial Intelligence, pages 1729–1736.
Parsons, S. and Skiar, E. (2004). Teaching ai using lego
mindstorms. In Greenwald, L., Dodds, Z., Howard,
A., Tejada, S., Weinberg, J. (eds.) Accessible Hands-
on AI and Robotics Education, pages 8 –13.
Perhinschi, M. G. (2017). Wumpus world in introductory
artificial intelligence. In An Introductory Course on
Computational Artificial Intelligence Techniques for
Engineering Students, pages 1–9.
Russell, S. and Norvig, P. (2010). Artificial Intelligence: A
Modern Approach. Prentice Hall, 3rd edition.
von Hausswolff, K. (2017). Hands-on in computer pro-
gramming education. In ACM Conference on Inter-
national Computing Education Research.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
850
