
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz
Study
Luka Rukoni
´
c
1 a
, Marie-Anne Pungu Mwange
2 b
and Suzanne Kieffer
1 c
1
Institute for Language and Communication, Universit
´
e catholique de Louvain, Louvain-la-Neuve, Belgium
2
AISIN Europe, Braine-L’Alleud, Belgium
Keywords:
Interactive Driver Tutoring, Mental Models, Car Voice Assistant, Wizard of Oz, Advanced Driver Assistance.
Abstract:
Understanding the limitations and capabilities of the advanced driver-assistance systems (ADAS) is a pre-
requisite for their safe and comfortable use. This paper presents a formative user study on the use of a
dialogue-based system, implemented using the Wizard of Oz (WOz) technique, to help drivers learn about
the correct use of driving assistance. We investigated whether drivers would build the correct mental model of
the driving assistance systems through natural language dialogue. We describe the evolution of the prototype
over four iterations of formative evaluation with older and younger drivers. Using a mixed-method approach,
combining the WOz, interviews, questionnaires, and a knowledge quiz, we evaluated the prototype of a voice
assistant and identified the teaching content objectives. Participants’ mental model about ADAS was assessed
to evaluate the efficacy of the teaching approach. The results show that the teaching goals need to be clearly
communicated to the drivers to ensure the adoption of the VA.
1 INTRODUCTION
Advanced Driver-Assistance Systems (ADAS) are
present in almost every new vehicle sold on the mar-
ket. According to EU regulations, all new vehicles
will need to be equipped with at least level 2 automa-
tion according to SAE taxonomy (SAE, 2018). ADAS
leads to increased driving safety and comfort, how-
ever, only if used correctly and consciously. Some
car models offer much more than basic lane-keeping
and adaptive cruise control systems, such as lane de-
parture warning, automatic emergency braking, ob-
stacle and object detection and driver state monitor-
ing. Although useful, many drivers are not aware of
all the systems their car is equipped with, which leads
to a low usage and adoption rate of these systems.
In addition, many drivers do not receive proper train-
ing about the availability and capability of the ADAS
systems when purchasing a new car. Besides, learn-
ing about automation systems from user manuals is
also insufficient to build a correct mental model of
the systems (Boelhouwer et al., 2019). Because of
that, drivers learn how to use ADAS systems by them-
a
https://orcid.org/0000-0003-1058-0689
b
https://orcid.org/0000-0003-2971-6347
c
https://orcid.org/0000-0002-5519-8814
selves, on public roads, where they test how the vari-
ous systems work or when they stop functioning. As
a result, driving safety benefits might be waived due
to wrongly constructed drivers’ mental models about
how ADAS functions (Rossi et al., 2020). Further,
better understanding of the limitations and boundaries
of driving automation systems leads to improvements
in drivers’ trust calibration which is a crucial aspect
to their safe use (Walker et al., 2018)
This study primarily focused on drivers above 50,
who are underrepresented in research studies (Young
et al., 2017), but are highly interested in the benefits of
using ADAS, despite concerns about security issues,
system failures or hacking attacks(Schmargendorf
et al., 2018). Specifically, we investigated the use of
an interactive driver tutoring system with a voice as-
sistant (VA) to teach drivers about the correct use of
ADAS. Using a Wizard of Oz (WOz) simulating the
car-driver dialogue, we explored how drivers would
interact with a VA using natural language. We fo-
cused on teaching drivers about the capabilities and
limitations of the Lane Keeping Assistant (LKA) and
Adaptive Cruise Control (ACC) while driving on the
highway. We collected data using a high-fidelity
simulator platform. We combined subjective, self-
reported data with interviews to evaluate the user ex-
perience (UX) with the prototype.
88
Rukoni
´
c, L., Mwange, M. and Kieffer, S.
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz Study.
DOI: 10.5220/0010913900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 2: HUCAPP, pages
88-98
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The specific objectives of this study were: (1) ex-
plore how a voice assistant could be used to facilitate
learning about ADAS while driving; (2) evaluate the
driver’s trust in ADAS; (3) evaluate the mental model
of drivers about ADAS.
2 RELATED WORK
Research on the use of voice interfaces in cars is plen-
tiful. Politis et al. Politis et al. (2018) evaluated the
different types of dialogue-based systems to medi-
ate the takeover in automated driving by increasing
the situational awareness of the driver. They found
that an interface without additional spoken informa-
tion was most accepted, followed by the interface
where drivers had to respond to questions asked by
the system about the driving situation such as haz-
ards, current lane, speed or fuel level. Schmidt et al.
(2020) evaluated a proactive and reactive voice assis-
tant in use-cases such as navigating, refueling, and
checking the news. Proactivity was generally well ac-
cepted, but not for navigation use cases. Voice alerts
before automated braking have a positive impact on
driver’s anxiety, alertness, and sense of control (Koo
et al., 2016). Other applications include using voice
to guide a takeover from automated to manual driv-
ing (Kasuga et al., 2020), or as an auditory reliability
display to support and relax drivers in high levels of
automation (Frison et al., 2019).
2.1 Driver Tutoring
Merriman et al. (2021) identified driver training as a
solution to address four challenges associated with the
use automated vehicles, which are: (1) Drivers have
a poor mental model of the automation’s function,
capabilities, and limitations; (2) Automation reduces
driver’s cognitive workload thus decreasing driver’s
attention to the road; (3) Over-reliance on automa-
tion and reduction of driver’s self-confidence to drive
well manually without assistance; (4) Degradation of
driver’s procedural skills to drive manually. Our study
focuses on the first challenge by addressing the align-
ment of the driver’s mental model with the capabili-
ties and limitations of the driving-assistance systems.
Our prototype serves as the first step towards voice-
guided teaching while driving.
Forster et al. (2019; 2020) evaluated the effect of
user education using owner’s manuals and interactive
tutorials on driver’s mental model creation, satisfac-
tion, understanding, and performance with automated
systems. Both approaches showed superior operator
behavior compared to a generic baseline, however,
no difference in satisfaction was found. Boelhouwer
et al. (2019) found that informing drivers about car’s
automation capabilities using owner’s manual was not
sufficient to build accurate mental models of driving
automation. In addition, existing systems for in-car
driver tutoring rely on AR overlay on the windscreen
and auditory explanations of the ADAS functionali-
ties in low-complexity driving situations (Boelhouwer
et al., 2020).
Furthermore, Rossi et al. (2020) showed that peo-
ple who built their mental model of ADAS based on
reading a description about it, use ADAS more ef-
fectively and safely compared to those who build the
mental model on their own. Past research calls for
a structured approach to user education about driving
automation that relies on guided learning and building
declarative knowledge (Forster et al., 2019). Building
a correct or accurate mental model of driving automa-
tion and driving assistance technologies is crucial for
using it appropriately. Mental models represent what
people know and believe about the system they use
(Payne, 2012). This approach focuses on the con-
tents of the user’s mind, rather than the explanation of
cognitive processes for building the representations of
systems. The knowledge people possess can be used
to explain the behavior with the system in question.
2.2 Trust
Overtrust in ADAS can lead to decreased driving
safety and comfort. This is caused by a lack of
knowledge about the system’s boundaries and capa-
bilities. Walker et al. (2018) found that drivers tend to
overtrust Level 2 vehicle’s automation capabilities be-
fore trying it in real-life situations. After the on-road
experience, drivers understood better what the capa-
bilities of the ADAS were, and this led to a decrease
in trust in 7 out of 12 scenarios. According to Hoff
and Bashir (2015), trust is a multidimensional con-
cept consisting of dispositional, situated, and learned
trust. Preconceptions about the system play an im-
portant role in forming trust. A study by Lasarati
et al. (2020) investigated the effect of four textual ex-
planation styles on users’ trust in AI medical diag-
nostic systems. They found that thorough and con-
trastive styles were rated the highest. Proactive di-
alogue strategies, promoting acting to the user be-
fore problematic situations happen are found to in-
duce higher levels of trust when interacting with in-
telligent assistants such as robots (Kraus et al., 2020).
We used this assumption when designing our proac-
tive voice assistant for driver tutoring.
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz Study
89
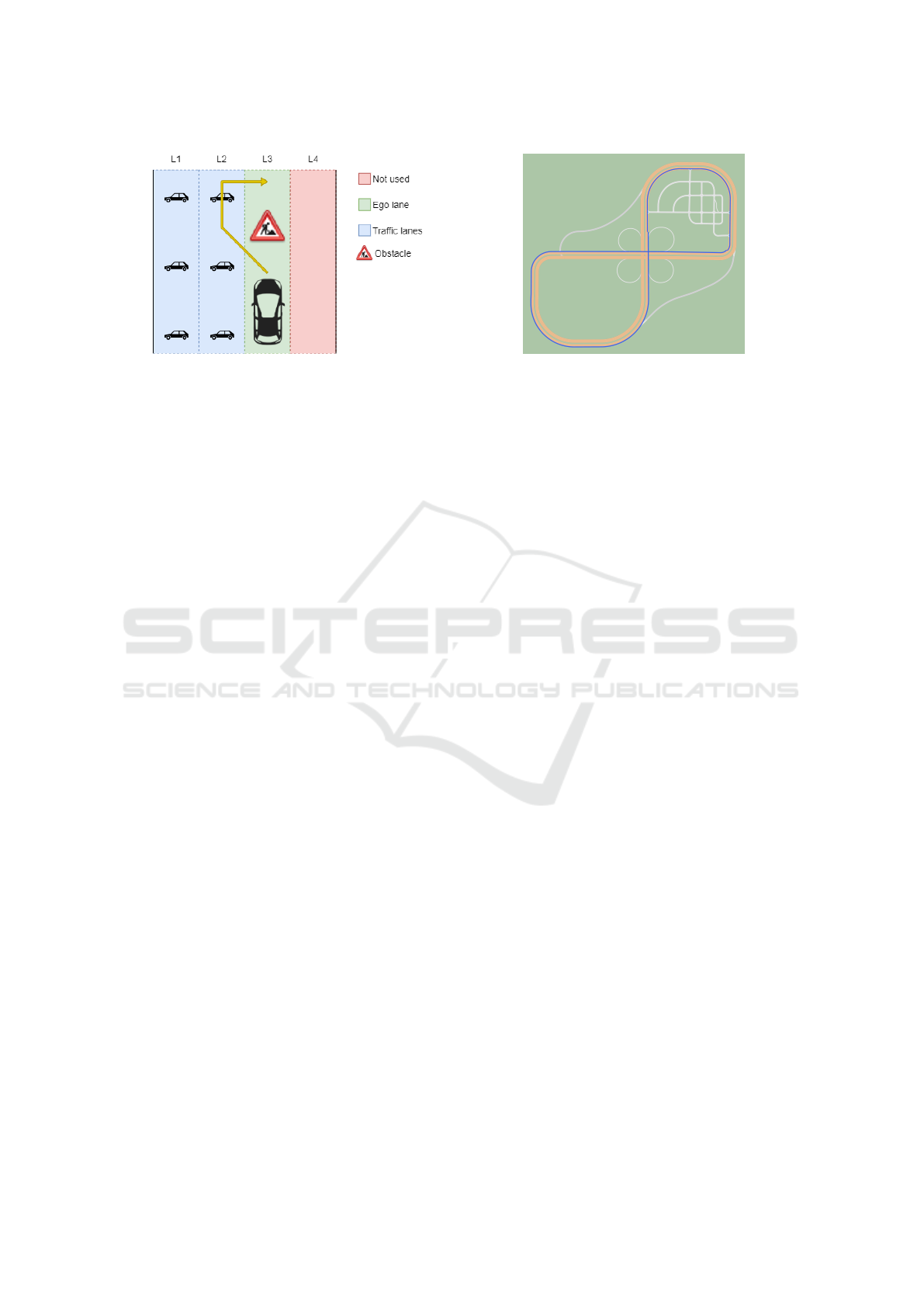
(a) Participants drove on L3 and used L2 to avoid obstacles. (b) Route indicated in blue on the loop highway in CARLA.
Figure 1: Lane configuration and road map used in the study.
3 USER STUDY
3.1 Iterative Design
We adopted a formative test-and-refine approach to
the design of the teaching assistant similar to Rukonic
et al. (2021). We conducted four iterations with a
small sample of participants to evaluate the proto-
types. Each new iteration saw improvements to the
prototype and the teaching content. This study does
not elaborate in detail the results and findings in each
iteration, but rather provides an overview of what we
learned and how we applied that to the incremental
development of the prototype. Thus, after a brief de-
scription of each iteration we focus on the main qual-
itative findings and lessons learned. Between itera-
tions, the user profile of participants varied, as well
as the data we collected to accommodate for the in-
vestigation of aspects we found relevant based on the
findings from the previous iteration. We aimed at col-
lecting qualitative data rather than investigating sys-
tematic differences between conditions through ex-
perimental manipulations. WOz is a great support in
the iterative design process that leads the implemen-
tation from early phases toward the design of the final
version (Dow et al., 2005).
Iteration 1. required participants to drive two dif-
ferent driving scenarios, namely, a baseline scenario
(scenario B) and a scenario with on voice assistant
(scenario VA). All participants drove both scenar-
ios. First, we ran scenario B to establish a baseline
driver behavior and to investigate their use of avail-
able ADAS systems. Then, we ran scenario VA to
check whether the VA actually supported drivers in
their learning about ADAS systems. We designed a
use case in which people drove on a highway and
were strongly hinted to use driving assistance.
In scenario B no advice was given to the partic-
ipants, so that they would build a mental model of
how to operate the LKA and ACC on their own, i.e.,
without voice assistance. They drove five laps on the
highway (Figure 1b), which lasted around 10 minutes.
Drivers encountered two obstacles, both necessitating
a takeover. The car detected obstacle#1 (truck), which
led to an activation of the emergency braking if they
did not react. In contrast, the car did not detect obsta-
cle#2 (container on the road), which led to a collision
if they did not perform an emergency maneuver (Fig-
ure 1a). In scenario VA, we used two language styles
(expert vs. helper) to write the advice for each type
of road event. These two styles were modeled after
the explanation goals presented by Sørmo and Cas-
sons (2005). They presented four explanation goals
for case-based reasoning, of which we selected two
and applied them to the design of our advice content.
The two explanation styles are based on the Trans-
parency goal (expert style), and Learning goal (help-
ing style). The expert style aims at explaining how
the system reached the answer, while the helping style
aims at teaching the user about the ADAS domain. In
the VA condition, roadworks and a police car were
used as obstacles. The police car triggering a similar
reaction as the truck of scenario B and a sign announc-
ing the roadworks taking the place of the container of
the previous use case.
Iteration 2. improved reactivity and proactivity of
the teaching assistant for ADAS. Also, the steering
wheel was turning while LKA was on. The goal was,
therefore, to explore users’ attitude towards a VA that
guides them through each ADAS feature. Two scenar-
ios were designed, where Scenario 1 aimed at driver’s
learning about the ADAS systems, while Scenario 2
aimed at putting their knowledge at test by making
the right decisions when avoiding obstacles and us-
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
90

age of safety systems such as forward collision warn-
ing (FCW) and automatic emergency braking (AEB).
We removed the baseline scenario and made the VA
available in both scenarios. Before Scenario 1, we
demonstrated the VA by guiding participants through
a short conversation with it to build the understanding
of how it worked. Instead of having to use the VA
immediately in the Scenario 1 as in iteration 1, we
learned that participants needed to become familiar
with the VA first as well. This way their efforts were
less focused on dealing with learning how to use the
VA, and more on learning about ADAS. Moreover, we
decided to write the teaching content using only one
language style, since we could not evaluate its effects
on our small sample size.
Iteration 3. focused on the transition between au-
tonomous and manual driving modes, precisely on
preparing drivers to take over and to hand over the
control. These events took place when getting on
or leaving the highway, e.g. to change the direction
or take the cloverleaf interchange roads (Fig. 1b).
ADAS was available only on the highway loop and
in case there were no obstacles ahead. ADAS was
not available on side roads, interchange loops, and
when an obstacle was announced. The VA content
was written with these situations in mind. Scenario
1 covered the transition use-case and the availability
of autonomous driving depending on the road type.
Scenario 2 focused on the interaction with and use of
ADAS while the driver was performing a secondary
task, also called a non driving-related task (NDRT),
i.e. making a phone call. We told participants to use
the VA to learn about capabilities and limitations of
ADAS, traffic situation, and takeover procedure. We
used NDRTs to put the driver out of the loop (OOTL),
i.e. in situations where drivers are not monitoring
the driving situation, but may or may not be phys-
ically controlling the car (Merat et al., 2019). Being
OOTL causes a loss of situational awareness and com-
promises drivers’ monitoring or takeover capabilities
(Merat et al., 2019). We aimed to explore the po-
tential role of the VA to help maintain driving safety
and situational awareness while the driver is making
a phone call. We hypothesized that a low situational
awareness caused by the NDRT would naturally mo-
tivate drivers to use the VA, so as to rebuild it. As re-
search in UX tells us that when people have a goal in
mind, they use the appropriate technology to achieve
it (Hassenzahl, 2018).
Iteration 4. required participants to execute a series
of tasks with the VA. Scenario 1 focused on learn-
ing about ADAS. The tasks were presented to them
on a tablet placed on their left-hand side next to the
steering wheel. We allocated a few minutes before
the scenario started to read the tasks thoroughly and
get familiar with them. They could ask us for clar-
ifications if needed. All tasks were presented on the
screen at the same time. We told participants that they
were free to choose when to complete each task and
their order. However, we suggested following the or-
der of tasks as shown on the screen. Scenario 2 was
designed to collect interaction data with the VA in ob-
stacle avoidance situations.
3.2 Teaching Content Design
The process of learning is divided into three stages:
acquiring declarative and procedural knowledge, con-
solidating the acquired knowledge, and tuning the
knowledge towards overlearning (Kim et al., 2013).
We designed the teaching content of our study with
the aim of building drivers’ declarative knowledge.
It focuses on facts and things people know about a
system, which in our case were ADAS systems such
as ACC and LKA. Conversely, procedural knowledge
explains how to solve a problem or achieve a task us-
ing a system (Forster et al., 2019; Kim et al., 2013).
However, declarative knowledge is prone to fast de-
cay in case of infrequent use. Knowing this limita-
tion, we believed that acquiring declarative knowl-
edge while practicing the use of ADAS in parallel
might help build the procedural knowledge, which is
immune to decay. To that end, we measured driver’s
learning and retention of declarative knowledge about
ADAS in this study.
3.3 Participants
Each iteration involved six participants holding a
valid driver’s license. All participants were given an
incentive for taking part in the study. Iterations 1-3
only involved people above 50 years old, who were
active users of ADAS including ACC and LKA, as
50+ drivers were the focus of the research project we
were working on. Iteration 4 involved both young
and older drivers with no existing experience with
ADAS, as VA might be more useful to drivers who
begin using it. Drivers with previous experience with
ADAS might have built a mental model that is hard to
change through the acquisition of declarative knowl-
edge about ADAS and its related features. We con-
sidered someone an older driver was a person above
50 and holding their driver’s license for more than 20
years. Conversely, a younger driver was a person be-
tween 22 and 30 years old, holding their driver’s li-
cense for a maximum of three years.
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz Study
91

(a) Fixed-base simulator setup. (b) HUD automation status icon and speed indicator.
Figure 2: Simulator setup and head-up-display (HUD) icons.
3.4 Materials and Apparatus
The study was conducted using a fixed-base driving
simulator. It consisted of three 50-inch screens cov-
ering an 180 degrees field of view, a real adjustable
car seat, a Fanatec steering wheel with force feed-
back, gas, brake, and clutch pedals, and a gear lever
(Fig 2a). A high-fidelity sound system was installed
to produce a realistic and immersive sound, together
with a low-frequency speaker placed under the seat
to simulate car vibrations. We used the open-source
CARLA simulator software (Dosovitskiy et al., 2017)
that we adapted to our needs by enabling manual and
automated driving. A screen showing the navigation
map was placed on the right-hand side of the driver.
The driving scenarios were executed in a closed-loop
highway environment depicted in Figure 1b. To sim-
ulate ADAS systems, LKA and ACC were imple-
mented in a slightly different way compared to real
cars. Regarding LKA, it only worked on one of the
four highway lanes. Regarding ACC, the minimum
speed limit to activate it was 50 km/h. To turn on the
driving assistance, a driver had to press a button on
the steering wheel. To adjust the speed of ACC, there
were two buttons on the steering wheel to increase or
decrease the speed by 5 km/h. In sum, the ADAS sys-
tems did not replicate those intended for road use, but
only resembled them.
3.5 Wizard of Oz
We used the Wizard of Oz (WOz) method involving
two wizards to simulate the VA. Two human wizards
worked together on analyzing driver’s utterances and
generating output. One wizard was in charge of gen-
erating feedback utterances after the obstacle avoid-
ance, while the other was in charge of generating ut-
terances related to teaching about the driving assis-
tance. The wizards were located in the same room
as the simulator, but separated from it by sound-proof
panels. We installed a microphone close to the steer-
ing wheel to hear what the participants were saying.
Wizards wore headsets during the evaluation and each
worked on their own workstation to generate the ap-
propriate output. When in doubt, wizards consulted
each other to clear out misunderstandings or to agree
on the output that was to be selected.
The wizards listened to participants’ utterances
and then selected the appropriate response in the wiz-
ard’s user interface. A text-to-speech (TTS) sys-
tem produced the spoken outputs using a male voice
with a British accent. We followed a proactive ap-
proach when designing our VA similarly to Schmidt
et al. (2020), where the VA would provide warnings
or feedback without participant’s request. The goal
was to explore how drivers would interact with the VA
to learn about the limitations and capabilities of the
LKA and ACC. Participants were given the follow-
ing three tasks explaining what the the voice assistant
could do: (1) Explain driving assistance features such
as LKA and ACC; (2) Advise how to use the driv-
ing assistance systems; (3) Explain the decisions the
car is making. In addition, we wrote a set of prede-
fined messages for the two wizards related to the feed-
back and questions we assumed would be asked the
most (see Data Availability section for a full dataset
of WOz messages). The types of predefined messages
to respond to driver’s requests included responses
about: ACC/LKA activation/deactivation, ACC/LKA
descriptions and purpose, Lane change/steering capa-
bilities, Non-supported questions (e.g. navigation, re-
minders, appointments, weather).
Upon arrival, participants signed a consent form
and were given explanations about study goals and
data collection. Then, we administered the demo-
graphic survey (age, gender, driving experience, and
experience with ADAS systems) and interviewed par-
ticipants about their experience of learning how to
use ADAS. Afterwards, participants completed a 10-
minute test drive in manual driving mode to get famil-
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
92

iar with the simulator. Then, we used a slideshow pre-
senting the rules to follow while driving and instruc-
tions about the simulator and the VA. The slideshow
included a prerecorded narration to avoid between-
participants variability in the explanation of the rules
and instructions about the test procedure. Thus,
all participants received the same information before
starting the experiments. This consideration ensures
the internal validity when studying driving assistance
systems (Schn
¨
oll, 2021). Engagement and disengage-
ment criteria of the driving assistance, together with
braking and steering interventions were explained.
However, no detailed instructions about the take-over
procedure were given. Then, the Scenario 1 started,
followed by Scenario 2. After each scenario, we ad-
ministered a knowledge quiz followed by the ques-
tionnaires assessing trust and quality of the VA. All
sessions were video-recorded. Finally, we conducted
a semi-structured interview and closed the session.
3.6 UX Measures
We combined relevant questionnaires identified in
the literature and a custom-made quiz to collect data
about the UX with the VA. We used the SASSI ques-
tionnaire (Hone and Graham, 2000) to evaluate the
VA, as it provides the highest coverage of UX dimen-
sions and it is a recommended instrument to evaluate
speech-based interfaces (Kocaballi et al., 2018) and
is best-rated in terms of face validity (Br
¨
uggemeier
et al., 2020). SASSI consists of 34 items rated on a
7-point rating scale and distributed between six fac-
tors: system response accuracy, likeability, cognitive
demand, annoyance, habitability and speed.
We evaluated trust using a questionnaire by Mad-
sen & Gregor (2000) initially designed to evalu-
ate trust between humans and automated systems
supporting decision-making and providing advice to
users. The instrument consists of five dimensions:
perceived reliability, perceived technical competence,
perceived understandability, faith and personal attach-
ment. Items were rated using a 5-point Likert-type
scale.
We created and used a knowledge quiz to assess
the accuracy of participants’ mental model of the driv-
ing assistance system with respect to the amount of
declarative knowledge they retained or gained during
the simulation. We administered the knowledge quiz
after each condition in iterations 1, 2 and 4, the quiz
containing 10, 11 and 14 statements respectively (Ta-
ble 1). The possible answers were ”True”, ”False”
and ”I don’t know”. Both wrong answers and ”I don’t
know” were considered incorrect answers. In itera-
tion 4, each statement used a Likert-type response for-
mat, ranging from Strongly Disagree (1) to Strongly
Agree (6), without the neutral position to encourage
precise answers from participants. We treated items
individually as interval data, and not as a Likert scale.
Thus, we do not compare the quiz results of iterations
1-2 to iteration 4. In iteration 4, we administered the
knowledge quiz twice: immediately after the simula-
tion and two weeks later, remotely, without partici-
pants coming to drive in the simulator again.
4 RESULTS
4.1 Driver’s Learning - Mental Model
Knowledge quizzes in iterations 1 and 2 had 10 and 11
questions respectively, thus we calculated the mean
scores of correct answers and converted them to per-
centages. Overall, participants scored better on the
quiz after Scenario 2 (Table 2). The quiz scores were
higher in iteration 2, indicating a more accurate men-
tal model. Due to the nature of formative evaluations
with a small participants sample, we cannot directly
attribute the higher score to the presence of the VA.
Q3, Q6, and Q8 had the lowest number of correct an-
swers in iteration 1. Regarding Q3 and Q6, partici-
pants could not answer correctly because they did not
see those events happening, nor did they ask the VA
about it. Although AEB was implemented to stop be-
fore a car and a truck, no participant let that happen.
Regarding Q8, none of the participants asked the VA
regarding the minimum speed to activate ADAS, nor
did we implement a specific indication to warn the
drivers about that. All other questions covered situa-
tions that happened in test scenarios and participants
could draw conclusions based on that.
To evaluate the mental model of participants in
iteration 4, we divided the statements from the quiz
in two categories: true statements and false state-
ments. The differences in the answers to the quiz
between two scenarios were very small (Figure 3).
The paired t-test also showed no statistically signif-
icant differences. The mean quiz scores in Scenario
1 (M=4.02) and scenario 2 (M=3.89) indicate that
there was no difference in the understanding of the
ADAS between two scenarios (t(13) = 0.822, p=.42,
two-tailed). However, for better interpretation of quiz
results, we calculated the closeness score of partic-
ipants’ mental model representation of ADAS (per-
ceived representation) to the actual functioning of
ADAS (actual representation). The closer the average
score for each question in the quiz was to the target
score of 1 or 6, the more accurate we considered their
mental model representation to be.
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz Study
93
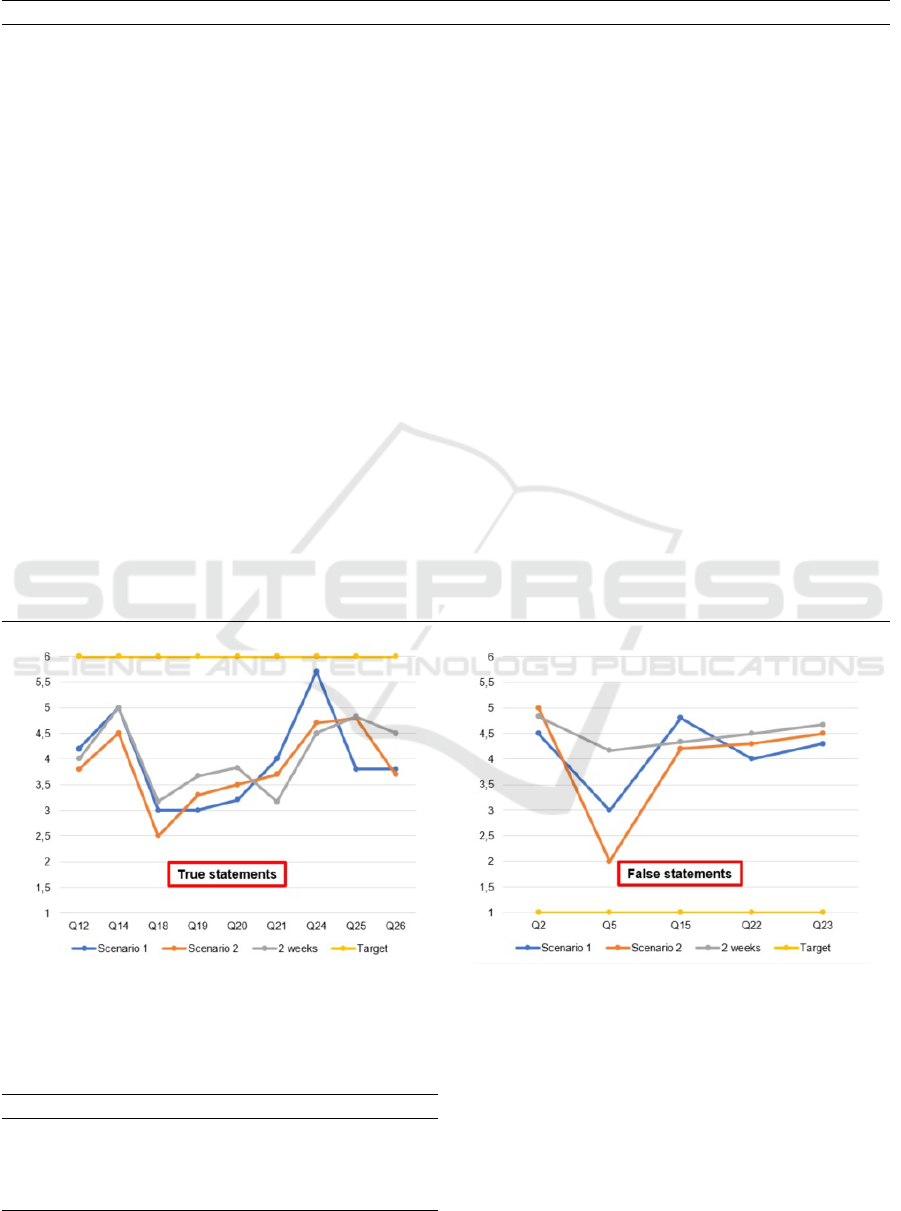
Table 1: Knowledge quiz statements used in Iteration 1, 2 and 4 and related correct answers.
ID IT Question Answer
Q1 1 When ADAS is activated, the steering wheel moves when the car is turning False
Q2 1,2,4 The system can detect (static) objects on the road (barriers, trash, etc.) False
Q3 1 The system can detect other cars True
Q4 1 When the assistant is activated, the system can handle turns True
Q5 1,2,4 I can activate LKA and ACC separately False
Q6 1 The system can detect trucks True
Q7 1 When the assistant is activated, the car is not able to avoid road works True
Q8 1 The assistant will work only if I drive faster than 50 km/h True
Q9 1 When the assistant is activated, the icon turns white False
Q10 1 The ACC helps me to stay in the lane False
Q11 1,2 To deactivate the driving assistance, I can brake True
Q12 2,4 The Automated Emergency Braking activates with stationary and moving vehicles True
Q13 2 The car can detect road works False
Q14 2,4 The car is able to avoid accidents by braking if the car in front of it is too close True
Q15 2,4 The ACC is not able to adapt the car’s speed with stationary vehicles False
Q16 2 The driving assistant can be turned on at 30kph False
Q17 2 The Forward Collision Warning is able to only detect moving vehicles False
Q18 4 There are potential problems to stay in lane in sharp turns True
Q19 4 Automated driving might not work well in the rain True
Q20 4 Automated driving might not work well in the fog True
Q21 4 There are potential problems to recognize pedestrians on the road True
Q22 4 The warning alerts are given for any type of obstacle on the road False
Q23 4 The car will come to a safe stop if I do not react to a takeover request False
Q24 4 I need to take over every time the take over request occurs True
Q25 4 Automated driving system requires me to constantly monitor the road True
Q26 4 Automated driving system is only available on the highway with multiple lanes True
(a) Scores for true quiz statements. (b) Scores for false quiz statements.
Figure 3: Mental model assessment mean scores. 2 weeks=mean score after 2 weeks.
Table 2: Knowledge quiz results for iterations 1 and 2.
IT=iteration; SC=Scenario; IDNK=I do not know.
IT SC Mean SD IDNK Score/100 N
1 S1 5,8 1,8 2,4 53 6
1 S2 6,3 0,8 1,5 57 6
2 S1 6,2 1,79 1,2 62 5
2 S2 7,4 1,34 0 74 5
We developed this measure to check the accu-
racy of participants knowledge in relation to the tar-
get responses based on the truthfulness of the state-
ments. Thus, the target for true statements was 6
(Strongly Agree) and the target for false statements
was 1 (Strongly Disagree). The lower the closeness
value the better. The closeness of true statements was
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
94

Figure 4: Mean trust scores per iteration and scenario.
slightly lower in Scenario 1 (2.03) than in Scenario 2
(2.17). Overall, Fig. 3a shows the mean scores be-
tween the two scenarios were relatively unchanged. It
appeared to be more difficult for the participants to
determine whether false statements were true or false
(Fig. 3b). The closeness score after Scenario 2 (3.00)
shows higher accuracy compared to Scenario 1 (3.12).
At this stage, we assume false statements were
not answered as accurately because participants were
not always able to experience those situations in the
driving scenarios. Although it was theoretically pos-
sible to test those situations, false statements cov-
ered borderline situations that would require partici-
pants to compromise driving safety, e.g. waiting to
see whether the car will detect static objects on the
road (Q2). Similarly, for Q22 and Q23, it was not
possible to build the accurate mental model. Interest-
ingly, Q5 has the highest closeness discrepancies. To
sum up, the high closeness score of false statements
indicates the importance of addressing untrue behav-
iors and borderline situations in the teaching content
to improve the users’ mental model representation.
These issues represent the work for future develop-
ments. Two weeks later, we measured participants’
mental model accuracy again. True statements were
rated with even better closeness to the target, although
just for a fraction, scored at 1.93. The false statements
were rated similarly as well compared to the original
score, with the closeness score of 3.5. Therefore, we
may assume that the accuracy of the mental model is
robust in people’s minds two weeks after the use with-
out being exposed to the system at all.
4.2 Trust in ADAS
Trust increased in Scenario 2 in iteration 1 across all
subscales (Figure 4), compared to Scenario 1 when
VA was not available. Perceived Understandability,
measuring how well a user can form a mental model
of the system, scored particularly well in both condi-
tions. However, the results of the quiz (2) confirm
that they reflect participants’ perceived understand-
ability and not the actual one. This could be due to
participants’ learned trust affected by their preexisting
knowledge, as explained by Hoff and Bashir (2015).
Most participants formed expectations from the sys-
tem based on their previous interactions with ADAS
in real-world cars. In our study, some driving assis-
tance features were not present, such as that the steer-
ing wheel was not moving in turns. In other iterations,
the trust scores did not change between scenarios, in-
dicating that the choice of tasks to complete or goals
to achieve does not affect trust significantly.
4.3 Voice Assistant Evaluation
The SASSI system response accuracy score indicates
that the system scored well on recognizing correctly
users’ input and that it performed as they intended
and expected (Table 3). This is expected since hu-
man operators (wizards) interpreted the user’s input.
Likeability had the highest score amongst all fac-
tors, which indicates that users had a positive atti-
tude towards the system. Regarding cognitive de-
mand, it seems that driving and interacting with the
VA at the same time was quite demanding for drivers.
This could potentially be improved by revising the
length of the teaching content or by introducing an-
other modality to convey the knowledge, i.e. visuals.
Annoyance was rated low (2.96), which implies a pos-
itive user experience. Habitability tells us that there
is a relatively good match between the user’s mental
model of the VA and the actual system. Finally, speed
was rather low (4.31), presumably because wizards
were not always able to produce the output in a short
time frame. Participants confirmed that in interviews.
4.4 Discussion and Lessons Learned
We used the log files from the wizard’s TTS interface
and manually extracted participants’ utterances from
the video recordings to build the interaction corpus.
Table 4 shows the summary of learning objectives that
the teaching content for the VA should address. We
believe these guidelines will be helpful for VA design-
ers and future studies related to teaching about ADAS.
From each video recording, we aggregated partici-
pants’ statements in interviews and extracted the rel-
evant comments and reflections from them. Using the
affinity diagramming technique, we categorized these
statements. Below we give short summaries of our
findings across all four iterations.
Regarding teaching content, participants agreed
that the content was clear and useful. They empha-
sized the usefulness of the VA when driving a car for
the first time, such as when buying a new one or us-
ing a rental car. Nevertheless, there should be a way
to skip some parts of the learning process. Some par-
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz Study
95

Table 3: Mean scores per construct and overall from SASSI questionnaire rated on a 7-point rating scale.
Iteration Condition SRA LKA CD ANO HAB SP Overall SASSI N
1 S2 4,18 5,11 4,68 3,32 4,9 3,9 4,35 6
2 S1 3,82 5,57 4,96 3,1 4,27 3,75 4,25 5
3 S1 4,6 6,2 5,08 3,4 4,25 4,9 4,74 5
3 S2 4,51 5,89 5,36 3,36 4,85 4,9 4,81 5
4 S1 4,42 5,78 5 2,4 4,4 4,2 4,37 6
4 S2 4,27 5,91 4,92 2,2 4 4,2 4,25 6
All All 4,3 5,74 5 2,96 4,45 4,31 4,46
Table 4: List of learning goals to address in the design of the teaching content.
Domain Category Description
ADAS Explanation Provide descriptions about ADAS systems available
ADAS Automation Explain how driving can be automated using LKA and ACC
ADAS Takeover Describe when the takeover request is issued
ADAS Activation Explain how to activate driving automation
ADAS Limitations Describe the operational boundaries of the driving automation system
ADAS Takeover Describe the takeover procedure and how to disable driving automation
ADAS Speed regulation Explain how the car speed is set and regulated
ADAS Controls Explain the use of buttons to control ADAS to the driver
ADAS Availability Justify why driving automation is/is not available
ADAS Availability Inform the driver when driving automation is/is not available
ADAS Speed Explain how the ACC speed adaptation works
Driver Monitoring Explain what happens when driver does not react to takeover requests
Driver Role Explain the driver’s role while automation is on
User Interface Icons Explain the placement and meaning of automation status icons
VA Usefulness Inform the driver about what the VA is capable of doing
VA Navigation Provide explanation for why a certain route is calculated as best
ticipants thought that this information could be dis-
tributed without having to drive or at the red light.
Regarding participants’ mental model, we con-
cluded that most of them did not build an accurate
understanding of ADAS. In iterations 1 and 2 partici-
pants thought LKA was not available or that it could
not handle turns because the steering wheel did not
physically rotate in turns. There was no trait that
would provide a cue in the user’s environment to sig-
nal the functioning of the LKA. This resulted in a
behavior where participants kept turning the steering
wheel despite the driving assistance being switched
on. To illustrate, P4 said: ”There was only cruise
control and there was no lane assist. Or I don’t find
it or I don’t understand it but I don’t feel it”. Further-
more, in iteration 1, some participants claimed that
ACC was not adaptive because they did not get to try
it while driving. Since the lane of the driver’s vehicle
was empty (Fig.1a), participants did not try to posi-
tion their car on the left lanes that carried traffic (L1
and L2). Participants could not determine the capabil-
ities of obstacle detection and avoidance accurately.
The reason could be that there were not enough situa-
tions to analyse the car’s behavior regarding obstacle
detection as we only had two obstacles per scenario.
The most common complaint was about the VA’s
response time. We expected this to occur when the
wizards faced a request for which they did not have
the answer prepared. However, half of the partici-
pants expressed that they had issues identifying what
to ask the VA, although they received instructions. In
interviews, some participants revealed that it was dif-
ficult to understand what the assistant could help them
with. For example, P3 said ”It was not easy to find
questions let’s put it that way”. P4 said: ”Yes, very
useful but we have to know what kind of information
we can ask the system”. It may be that participants
felt they were not supposed to learn about the system
while driving. As P1 said: ”I don’t think that when
you are in the car, you should learn the theory about
how it works. It is about the practical part when you
are driving”. This suggests that learning by doing
might be a better approach than providing the list of
tasks the VA supports.
Participants often questioned the usefulness of the
VA in the long-term. Although they generally liked
the availability of such assistance, they raised the
question of its long-term usage. Obviously, the ap-
plication of the VA to learning is a short-term goal
and its features should be extended to other domains,
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
96

such as traffic information as suggested by P1. P3
said ”Something that came through my mind, it’s a
little bit to replace the manuals, which are boring”,
which is an existing idea and one of the goals of this
study too. P6 said that receiving feedback about the
use of driving assistance was not needed; ”But when I
avoided the accident, the voice told me “ok you man-
aged to avoid the thing”. This was obvious. What is
the added value of telling me I did a good job?”.
In iteration 2, participants seldom interacted with
the VA. Conversations were simple and were con-
structed as a short question and answer. The VA
started conversations most times and drivers would
shortly respond. Although participants were provided
with learning goals, they rarely completed them, in
which case wizards decided to proactively start con-
versations or provide teaching content without de-
mand. P4 said it was easy to focus both on the road
and the spoken content, while P5 commented that
talking to the car was not a usual practice. In itera-
tion 3, however, participants talked even less with the
VA, stating a lack of explicit tasks or reason to do so
as a cause. All six participants said it was unclear that
they had to start the conversation and think of ques-
tions to ask about ADAS. Most times, the VA initi-
ated the interaction and consisted of warning alerts
and warning messages about takeover requests. How-
ever, when participants did speak to the VA, they tried
to request the VA to remind them when to take the turn
or to activate ADAS. In iteration 4, the introduction of
tasks produced more interaction between drivers and
the VA and it seems a promising teaching approach.
5 CONCLUSION
This paper contributes to the topic of the design of
conversational agents aimed at driver tutoring about
driving assistance systems in vehicles. We compiled a
list of learning objectives a teaching assistant should
support. Our findings suggest that drivers welcome
the idea of a VA for such purposes. However, the pur-
pose, tasks, and functions of such assistants have to be
clear to drivers to increase its adoption. Although we
provided explanations and limitations of the VA, par-
ticipants still did not know how exactly they should
interact with the assistant, despite their insufficient
understanding of the implemented driving assistance.
Nevertheless, participants seemed to be eager to ex-
plore the possibilities of the VA and were favorable
towards the idea of having such a system in their
car. However, we believe that this was due to unclear
specifications of the purpose and functionalities of the
VA. Additionally, the knowledge retention rates re-
mained high two weeks after the learning took place.
This indicates that using speech to provide declara-
tive knowledge to drivers might be effective. How-
ever, further research is necessary to establish clear
design guidelines as well as to focus on the learn-
ing and retention of procedural knowledge in various
driving situations. Finally, the transfer of knowledge
in real-world scenarios is another challenge that needs
to be addressed.
ACKNOWLEDGEMENTS
This research has been supported by the Service Pub-
lic de Wallonie (SPW) under the reference 7982.
REFERENCES
Boelhouwer, A., van den Beukel, A. P., van der Voort,
M. C., and Martens, M. H. (2019). Should I take
over? Does system knowledge help drivers in mak-
ing take-over decisions while driving a partially auto-
mated car? Transportation Research Part F: Traffic
Psychology and Behaviour, 60:669–684.
Boelhouwer, A., van den Beukel, A. P., van der Voort,
M. C., Verwey, W. B., and Martens, M. H. (2020).
Supporting drivers of partially automated cars through
an adaptive digital in-car tutor. Information, 11(4).
Br
¨
uggemeier, B., Breiter, M., Kurz, M., and Schiwy, J.
(2020). User Experience of Alexa when controlling
music: Comparison of face and construct validity of
four questionnaires. In Proceedings of the 2nd Con-
ference on Conversational User Interfaces, CUI ’20,
New York, NY, USA. Association for Computing Ma-
chinery.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An Open Urban Driving
Simulator. (CoRL):1–16.
Dow, S., MacIntyre, B., Lee, J., Oezbek, C., Bolter, J. D.,
and Gandy, M. (2005). Wizard of oz support through-
out an iterative design process. IEEE Pervasive Com-
puting, 4(4):18–26.
Forster, Y., Hergeth, S., Naujoks, F., Krems, J., and Keinath,
A. (2019). User education in automated driving:
Owner’s manual and interactive tutorial support men-
tal model formation and human-automation interac-
tion. Information (Switzerland), 10(4).
Forster, Y., Hergeth, S., Naujoks, F., Krems, J. F., and
Keinath, A. (2020). What and how to tell before-
hand: The effect of user education on understanding,
interaction and satisfaction with driving automation.
Transportation Research Part F: Traffic Psychology
and Behaviour, 68:316–335.
Frison, A.-K., Wintersberger, P., Oberhofer, A., and Riener,
A. (2019). ATHENA: Supporting UX of condition-
ally automated driving with natural language reliabil-
ity displays. In Proceedings of the 11th International
Teaching Drivers about ADAS using Spoken Dialogue: A Wizard of Oz Study
97

Conference on Automotive User Interfaces and Inter-
active Vehicular Applications: Adjunct Proceedings,
pages 187–193.
Hassenzahl, M. (2018). The thing and I: understanding the
relationship between user and product. In Funology 2,
pages 301–313. Springer.
Hoff, K. A. and Bashir, M. (2015). Trust in automation: In-
tegrating empirical evidence on factors that influence
trust. Human Factors, 57(3):407–434.
Hone, K. S. and Graham, R. (2000). Towards a tool for
the Subjective Assessment of Speech System Inter-
faces (SASSI). Natural Language Engineering, 6(3-
4):287–291.
Kasuga, N., Tanaka, A., Miyaoka, K., and Tatsuro, I.
(2020). Design of an HMI System Promoting Smooth
and Safe Transition to Manual from Level 3 Auto-
mated Driving. International Journal ITS Research,
18:1–12.
Kim, J. W., Ritter, F., and Koubek, R. (2013). An integrated
theory for improved skill acquisition and retention in
the three stages of learning. Theoretical Issues in Er-
gonomics Science, 14(1):22–37.
Kocaballi, A. B., Laranjo, L., and Coiera, E. (2018). Mea-
suring User Experience in Conversational Interfaces:
A Comparison of Six Questionnaires. In Proceedings
of the 32nd International BCS Human Computer In-
teraction Conference, HCI ’18, Swindon, GBR. BCS
Learning; Development Ltd.
Koo, J., Shin, D., Steinert, M., and Leifer, L. (2016). Un-
derstanding driver responses to voice alerts of au-
tonomous car operations. International journal of ve-
hicle design, 70(4):377–392.
Kraus, M., Wagner, N., and Minker, W. (2020). Effects
of Proactive Dialogue Strategies on Human-Computer
Trust. In Proceedings of the 28th ACM Conference
on User Modeling, Adaptation and Personalization,
UMAP ’20, page 107–116, New York, NY, USA. As-
sociation for Computing Machinery.
Larasati, R., Liddo, A. D., and Motta, E. (2020). The effect
of explanation styles on user’s trust. In 2020 Work-
shop on Explainable Smart Systems for Algorithmic
Transparency in Emerging Technologies.
Madsen, M. and Gregor, S. (2000). Measuring Human-
Computer Trust. In Proceedings of Eleventh Aus-
tralasian Conference on Information Systems.
Merat, N., Seppelt, B., Louw, T., Engstr
¨
om, J., Lee, J. D.,
Johansson, E., Green, C. A., Katazaki, S., Monk, C.,
Itoh, M., McGehee, D., Sunda, T., Unoura, K., Vic-
tor, T., Schieben, A., and Keinath, A. (2019). The
“Out-of-the-Loop” concept in automated driving: pro-
posed definition, measures and implications. Cogni-
tion, Technology and Work, 21(1):87–98.
Merriman, S. E., Plant, K. L., Revell, K., and Stanton, N.
(2021). Challenges for automated vehicle driver train-
ing: A thematic analysis from manual and automated
driving. Transportation Research Part F: Traffic Psy-
chology and Behaviour, 76:238–268.
Payne, S. J. (2012). Mental models in human–computer
interaction. In The Human–Computer Interaction
Handbook, pages 41–54. CRC Press.
Politis, I., Langdon, P., Adebayo, D., Bradley, M., Clark-
son, P. J., Skrypchuk, L., Mouzakitis, A., Eriksson, A.,
Brown, J. W. H., Revell, K., and Stanton, N. (2018).
An Evaluation of Inclusive Dialogue-Based Interfaces
for the Takeover of Control in Autonomous Cars. In
23rd International Conference on Intelligent User In-
terfaces, IUI ’18, page 601–606, New York, NY, USA.
Association for Computing Machinery.
Rossi, R., Gastaldi, M., Biondi, F., Orsini, F., De Cet, G.,
and Mulatti, C. (2020). A driving simulator study ex-
ploring the effect of different mental models on adas
system effectiveness. In De Paolis, L. T. and Bourdot,
P., editors, Augmented Reality, Virtual Reality, and
Computer Graphics, pages 102–113, Cham. Springer
International Publishing.
Rukonic, L., Mwange, M.-A., and Kieffer, S. (2021). UX
Design and Evaluation of Warning Alerts for Semi-
autonomous Cars with Elderly Drivers. In Proceed-
ings of the 16th International Joint Conference on
Computer Vision, Imaging and Computer Graphics
Theory and Applications - Volume 2: HUCAPP, pages
25–36.
SAE (2018). Taxonomy and definitions for terms related
to on-road motor vehicle automated driving systems.
SAE Standard J3016. USA.
Schmargendorf, M., Schuller, H.-M., B
¨
ohm, P., Isemann,
D., and Wolff, C. (2018). Autonomous driving and the
elderly: Perceived risks and benefits. In Dachselt, R.
and Weber, G., editors, Mensch und Computer 2018
- Workshopband, Bonn. Gesellschaft f
¨
ur Informatik
e.V.
Schmidt, M., Minker, W., and Werner, S. (2020). User
Acceptance of Proactive Voice Assistant Behavior.
In Wendemuth, A., B
¨
ock, R., and Siegert, I., edi-
tors, Studientexte zur Sprachkommunikation: Elektro-
nische Sprachsignalverarbeitung 2020, pages 18–25.
TUDpress, Dresden.
Schn
¨
oll, P. (2021). Influences of Instructions about Opera-
tions on the Evaluation of the Driver Take-Over Task
in Cockpits of Highly-Automated Vehicles. In 5th
International Conference on Human Computer Inter-
action Theory and Applications, Vienna, Austria. IN-
STICC, SCITEPRESS.
Sørmo, F., Cassens, J., and Aamodt, A. (2005). Ex-
planation in Case-Based Reasoning–Perspectives and
Goals. Artificial Intelligence Review, 24:109–143.
Walker, F., Boelhouwer, A., Alkim, T., Verwey, W. B., and
Martens, M. H. (2018). Changes in Trust after Driving
Level 2 Automated Cars. Journal of Advanced Trans-
portation, 2018.
Young, K. L., Koppe, S., and Charlton, J. L. (2017). Toward
best practice in human machine interface design for
older drivers: A review of current design guidelines.
Accident Analysis & Prevention, 106:460 – 467.
HUCAPP 2022 - 6th International Conference on Human Computer Interaction Theory and Applications
98
