
Controlled Synthesis of Fibre-reinforced Plastics Images from
Segmentation Maps using Generative Adversarial Neural Networks
Nicolas Schaaf
1 a
, Hans Aoyang Zhou
2 b
, Chrismarie Enslin
2 c
, Florian Brillowski
3 d
and Daniel L
¨
utticke
2 e
1
RWTH Aachen University, Aachen, Germany
2
Information Management in Mechanical Engineering, RWTH Aachen University, Aachen, Germany
3
Institute of Textile Technology, RWTH Aachen University, Aachen, Germany
Keywords:
GAN, Deep Learning, Fibre-reinforced Plastics, Quality Assurance, Defect Detection, Data Augmentation.
Abstract:
The replacement of traditional construction materials with lightweight fibre-reinforced plastics is an accepted
way to reduce emissions. By automating quality assurance, errors in production can be detected earlier, avoid-
ing follow-up costs and hard-to-recycle scrap. Deep learning based defect detection systems have shown
promising results, but their prediction accuracy often suffers from scarce labelled data in production pro-
cesses. Especially in the domain of fibre-reinforced plastics, the task remains challenging because of varying
textile specific errors. In our work, we applied conditional generative adversarial networks combined with
image-to-image translation methods to address data scarcity through generating synthetic images. By train-
ing a generative model on image-segmentation pairs, we produce realistic fibre images matching the given
segmentation maps. Our model enables control over generated output images of arbitrary fibre shapes and
structures, including gaps, ondulations, and folds as error classes. We evaluate our synthetic images based on
GAN metrics, feature distribution and show that they are suitable as a data augmentation method to improve
the error classification performance of deep neural networks. Thereby, we provide a solution for the manufac-
turing domain of fibre-reinforced plastics with scarce data, consequently contributing to an automated defect
detection system that reduces resource-intensive scrap in the future.
1 INTRODUCTION
Climate change, legal emission regulations and in-
creasing environmental awareness in society lead to
a steadily growing demand for lightweight materials
(T
¨
ure and T
¨
ure, 2020). The underlying idea of us-
ing these materials is to minimise the mass of mov-
ing parts, thereby reducing energy consumption, as
well as emissions. Fibre-reinforced plastics (FRP) are
a material class that provides the necessary require-
ments of mechanical strength and at the same time
low weight (Miao and Xin, 2018). However, pro-
ducing FRP is very expensive due to their resource-
intensive manufacturing process. Therefore, FRP
manufacturers need to avoid scrap and have extensive
a
https://orcid.org/0000-0002-7844-3229
b
https://orcid.org/0000-0002-7768-4303
c
https://orcid.org/0000-0002-3047-5846
d
https://orcid.org/0000-0003-4805-9573
e
https://orcid.org/0000-0002-7070-8018
quality control (QC) in order to be profitable and com-
petitive.
Currently, available QC systems can only indi-
rectly detect defects, such as folds (Fuhr, 2017) by
measuring the fibre orientations with for example
Canny-Edge detection. If a deviation in fibre orien-
tation is detected, the specific defect is then deter-
mined by a time-consuming, manual visual inspec-
tion. One possible solution to reduce manual labour
is to use Deep Learning (DL) models for automated
inspection to directly localise and classify defects in
semifinished textile products.
The technical feasibility of DL approaches for QC
in manufacturing of FRP has already been proven for
various approaches, such as using Convolutional Neu-
ral Networks (CNNs) for semantic segmentation in
order to detect defects in fabric image data (Wei et al.,
2019; Jing et al., 2019; Sacco et al., 2018; Sacco et al.,
2019). All approaches have a data-intensive labelling
process in common, in order to achieve high detection
accuracy.
Schaaf, N., Zhou, H., Enslin, C., Brillowski, F. and Lütticke, D.
Controlled Synthesis of Fibre-reinforced Plastics Images from Segmentation Maps using Generative Adversarial Neural Networks.
DOI: 10.5220/0010913700003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 801-809
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
801

Despite the promising results from the literature,
the usage of DL models as an automated solution for
image-based QC is still not standardised in industrial
environments, particularly not for the manufacturing
industry of FRP. On one hand, many FRP manufac-
turing companies have machine parks consisting of
old devices that lack data-gathering sensors or inter-
faces. On the other hand, due to small production lot
sizes, available data is also limited. As a result, there
is no, or only incomplete data available for the dif-
ferent steps of the production process. The accessible
data is often insufficient for training of detection mod-
els with acceptable detection accuracy. Additionally,
manual annotation of image data is an expensive and
time-consuming process.
An established solution to address insufficient
amounts of data is through data augmentation. Most
commonly, it uses existing images to synthetically
generate similar but realistic images via, e.g. geo-
metric transformations or stochastic noise. One re-
cent learning based approach for generating new data
samples are Generative Adversarial Networks (GAN)
(Goodfellow et al., 2014). By learning the underly-
ing data distribution of the available data, they have
shown remarkable results in generating realistic im-
ages.
Therefore, we investigate in this contribution the
effectiveness of GANs as a data augmentation method
for training DL models in the data scarce environment
of manufacturing FRP. In our work, we do not only
show that GANs are well-suited for generating real-
istic looking images of FRP, but also semantic mean-
ingful images for training a defect classifier without
manual labelling. In our evaluation, we validate nec-
essary use case driven modifications of model archi-
tecture and training process, qualitatively and quanti-
tatively. Through our quantitative results we show,
that the generated images on one hand contribute
positively in error detection accuracy and the other
hand resemble the feature distribution of the available
dataset. Our contribution validates GANs as a data
augmentation method for industrial applications with
scarce labelled data like the manufacturing of FRP.
2 RELATED WORK
Closely related to our task of synthesising images of
FRP, is the task of texture synthesis. The first ap-
proach that used a CNN to synthesise textures was
introduced in (Gatys et al., 2015). The main idea was
to describe textures as the correlation between high-
level features acquired through feature maps gener-
ated by different layers of a pretrained CNN. Fur-
ther improvements in generating texture with repet-
itive patterns were addressed by adding spatial trans-
formation (e.g. flipping or translation) on the feature
maps (Berger and Memisevic, 2017) and constraining
the frequency domain acquired with Fourier transfor-
mation of the generated image (Liu et al., 2016), or a
combination of both (S. Schreiber et al., 2016).
The first GAN based texture synthesis was intro-
duced in (Jetchev et al., 2017). In their work, the au-
thors replaced the usual noise vector with a spatial
noise tensor as the input for the generator. This al-
lowed the generation of high-quality images that scale
to bigger synthesised image sizes. Further improve-
ments in controlling the synthesis of images with
GANs were presented in (Xian et al., 2018). The au-
thors developed a conditional GAN that generates im-
ages of objects based on a sketch. Furthermore, dif-
ferent parts of the image can be modified through a
texture patch.
Outside texture synthesis, GANs are used as a
data augmentation method in different domains with
scarce labeled data (Shorten and Khoshgoftaar, 2019).
This is especially crucial for problems with imbal-
anced label distributions (e.g. anomaly detection).
One popular domain where these types of problems
frequently appear is the field of medical imaging (Yi
et al., 2019). Here, training samples are limited due
to their labeling cost or patient privacy, which moti-
vated researchers to investigate GANs as an alterna-
tive for synthesising training samples. Likewise, in
(Zhu et al., 2018) the authors successfully use GANs
to augment training data of underrepresented label
classes for emotion classification. Their results show
that through the data augmentation, the classification
performance increased significantly. In the domain of
textile manufacturing, GANs are investigated to gen-
erate textile design patterns (Fayyaz et al., 2020). In
their work, the authors evaluate different state-of-the-
art GAN-based architectures based on their inception
score and use a style transfer approach to generate
a combination of multiple textile designs. Although
GANs show promising results as a data augmentation
method, our work is the first to apply GANs as data
augmentation method in the context of manufacturing
of fibre-reinforced plastics.
3 METHOD
3.1 Dataset
Our dataset is created from greyscale surface scans
of plain weaves made of carbon fibres. Angle and
distance of the scanner head varies over the different
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
802
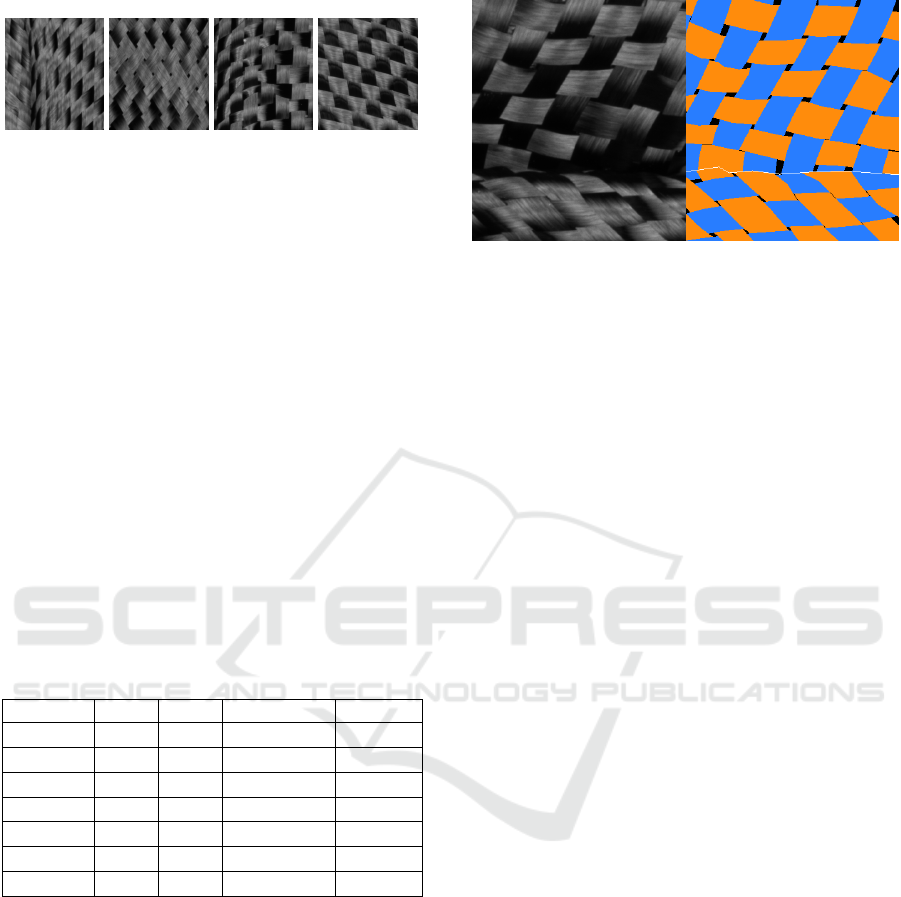
Fold Gap Ondulation Regular
Figure 1: Overview of different error classes of real images.
scans. To form our classification dataset, the surface
scans are cropped into 384 ×341 patches, filtered, and
assigned manually to one of four classes, namely fold,
gap, ondulation and regular (cf. Figure 1). As certain
types of errors often occur together with other errors,
we define the prioritisation with decreasing order as
fold, ondulation, gap, and regular. In the case of mul-
tiple errors we assign the class with the highest pri-
ority. The prioritisation is based on observations that
folds often come along with ondulations and ondula-
tions often come along with gaps. The “regular” class
only contains defect-free images. Our full dataset X
R
full
contains more than 12k instances.
In this work, we use the superscript R for real and
G for synthetic (generated) datasets and instances.
For the experiments we split up X
R
full
into 3 parts,
X
R
train
, X
R
val
, X
R
test
, for training, validation, and testing
of models, respectively. Table 1 provides a detailed
overview of the number of instances in all datasets
used in our research.
Table 1: Overview of instances per dataset.
Dataset Fold Gap Ondulation Regular
X
R
full
2717 5861 1261 2460
X
R
train,min
42 89 19 35
X
R
train
906 1954 421 820
X
R
val
906 1954 420 820
X
R
test
905 1953 420 820
X
G
U-Net
5000 5000 5000 5000
X
G
StarGAN
5000 5000 5000 5000
3.2 Image-to-Image Approach
Given the goal of using GANs as a data augmentation
method for defect classification, the generation of im-
ages need to be adaptable according to different error
classes. For this purpose, and to capture the geometric
structure of fibre parts, we create segmentation maps,
i.e. pixel-wise class labels, from our image data. To
simplify the manual work, fibre edges are approxi-
mated by quadratic or cubic B
´
ezier curves, or linear
splines.
The occurring patterns between warp and weft are
encoded with two different colours, depicted as or-
ange and blue in Figure 2, each indicating a fibre ori-
Figure 2: Segmentation map annotation of weave.
entation. Note that, since warp and weft cannot be
differentiated in the image patches, the fibre colours
are interchangeable. In addition to the fibre colour,
we add a third colour indicating fold lines, while gaps
are indicated as black sections (cf. Figure 2).
With the derived pairs of segmentation maps and
real images we train a generator, similarly to an
image-to-image approach that translates segmenta-
tion maps to realistic images. This training approach
with corresponding segmentation maps enables the
synthesis of specific weave images and the precise
control of fibre structure and geometry. For the train-
ing of the generator we use a modified implemen-
tation of BicycleGAN (Zhu et al., 2017) to learn a
model that maps segmentation maps to weave images.
BicycleGAN is a multimodal, supervised image-
to-image approach, which works as a hybrid of GANs
and autoencoders. Thus, it trains on input-output
pairs of images and allows, through the modification
of latent variables, to generate images in different
styles. These attributes make it the suitable frame-
work for our use case. In their implementation, Zhu et
al. (2017) use an adaptation of U-Net (Ronneberger
et al., 2015) as generator. U-Net is an architecture
that has been developed and become popular for im-
age segmentation tasks. It consists of an encoder-
decoder “bottleneck” architecture that has been ex-
tended by skip-connections from contracting to ex-
panding layers. A similar, but unsupervised, image-
to-image framework to BicycleGAN is StarGAN v2
(Choi et al., 2020). Like BicycleGAN it is multi-
modal, but, as a major difference, it works also for
unpaired data and can be trained on images from more
than two domains. Unlike Zhu et al. (2017), Choi et
al. (2020) use an encoder-decoder architecture with-
out skip-connections for their generator.
Controlled Synthesis of Fibre-reinforced Plastics Images from Segmentation Maps using Generative Adversarial Neural Networks
803

Input Ground truth Output
Figure 3: Example of the orientation problem, where fibres
of the output image are oriented towards the wrong direc-
tion.
4 IMPLEMENTATION DETAILS
When training BicycleGAN on our dataset in the con-
figuration of Zhu et al. (2017), we were facing several
issues, such as blurry outputs or the “orientation prob-
lem”. The orientation problem appears as fibre parts
oriented in the wrong direction, i.e. rotated 90 degrees
with respect to the direction intended by the segmen-
tation map (cf. Figure 3). We addressed these prob-
lems with a slightly modified architecture and training
setup.
4.1 Architectures
For the generator, we tested two different architec-
tures: An extended version of the U-Net architecture
proposed by Zhu et al. (2017), namely “Extended U-
Net”, and a modified version of the StarGAN v2 gen-
erator architecture proposed by Choi et al. (2020).
4.1.1 Extended U-Net
In our experiments, we found that the U-Net archi-
tecture proposed by Zhu et al. (2017) suffers from
the orientation problem when trained against an un-
conditional discriminator. The problem could not be
solved by additional training or an increased number
of parameters. It appears that an unconditional dis-
criminator is unable to learn the coherence of correct
fibre orientation, as it only gets to see the generator
outputs. The problem can be addressed with a con-
ditional discriminator, i.e. a discriminator which is
fed input-output pairs. Thereby, it is able to learn the
correct coherence from real image pairs and provide a
corrective feedback to the generator. However, we ob-
served that a conditional discriminator in combination
with the U-Net architecture leads to significant lower
image quality and blurry results. Our experiments in-
dicate that this is a general problem of U-Net-like ar-
chitectures.
As an alternative to address the orientation prob-
lem while keeping an unconditional discriminator,
we found it useful to place residual blocks in front
of U-Net. We orient towards the head architecture
of ResNet-34 (K. He et al., 2016) and add a 7 × 7
convolutional layer with 64 filters and a stride of 1,
and three residual blocks in front of U-Net to cre-
ate an “Extended U-Net”. The residual blocks cor-
respond to the ResNet-34 residual block with batch
normalization and ReLU activation replaced by in-
stance normalisation and LeakyReLU, respectively.
We observed that although the orientation problem
still occurred in early phases of training, the modifi-
cation overcomes it with longer training. Unlearning
through overtraining is also possible, therefore an op-
timal stopping point is found.
4.1.2 StarGAN V2
In addition to our proposed “Extended U-Net” archi-
tecture, we also experimented with the StarGAN v2
generator architecture to address the orientation prob-
lem. We found that for this architecture only a condi-
tional discriminator leads to acceptable results, as for
an unconditional discriminator the generator failed to
match the given segmentation maps in its outputs.
For our implementation, we slightly modified the
architecture by adding a downsampling and upsam-
pling block, respectively, to shrink the bottleneck to
a size of 8 × 8 × 512. Additionally, we removed the
adaptive wing based heatmaps from the skip connec-
tions, as our dataset does not require an alignment of
faces, and do not use a latent mapping network, as we
only have a single target domain.
4.2 Training
To show that our approach works for small dataset
sizes, we train our generator on a small dataset
X
R
train,min
consisting of 185 images from X
R
train
and their
corresponding segmentation maps. The models are
trained on 256 × 256 patches randomly cropped from
the training images. Before cropping, we scale im-
ages larger by a factor of 1.1 to 1.33, since it leads to
improved image quality. During the test phase, we
scale segmentation maps larger by a factor of 1.3,
feed them into the generator, and scale the output
back to the original size. Training samples are aug-
mented through rotating, flipping, and commuting the
fibre channels of the segmentation maps. We repre-
sent the colours in our segmentation maps in terms
of one-hot-encoding instead of RGB values in order
to prevent erroneously implied proximity by numeri-
cally close colour values. Due to the increased num-
ber of parameters of our generator architectures, we
train the Extended U-Net generator for 1200 epochs
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
804
and the StarGAN v2 generator for 1600 epochs dur-
ing the normal training phase and fine-tuning phase,
respectively. Unlike Zhu et al. (2017), we use the
same discriminator for the two training cycles, since
the usage of two independent discriminators does not
yield any benefits in our experiments.
5 EVALUATION
For the evaluation of our synthesised images we build
on four different methods: a manual, qualitative in-
spection by eye, an evaluation based on GAN scores,
an evaluation of the feature distribution, and a use
case based evaluation using synthetic images as aug-
mentation in a defect classification task. To create
our synthetic images, we generate 5000 synthetic seg-
mentation maps by modelling fibre courses with lines
or quadratic B
´
ezier curves and adding class-specific
characteristics, i.e. gaps, ondulations, or folds, in var-
ious shapes. We translate the same 5000 segmentation
maps once with the Extended U-Net and the StarGAN
v2 generator to create X
G
U-Net
and X
G
StarGAN
, respec-
tively. For our evaluation we assume that the class
intended to imitate in the segmentation map is equiv-
alent to the real class of the corresponding generator
output.
5.1 Manual Evaluation
To evaluate qualitative criteria and gain a first impres-
sion of the generated image quality, we assess our
synthetic images by eye. We found that both gener-
ator architectures produce sharp and realistic results,
without any evidence of the previously introduced ori-
entation problem. Blending of segmentation maps
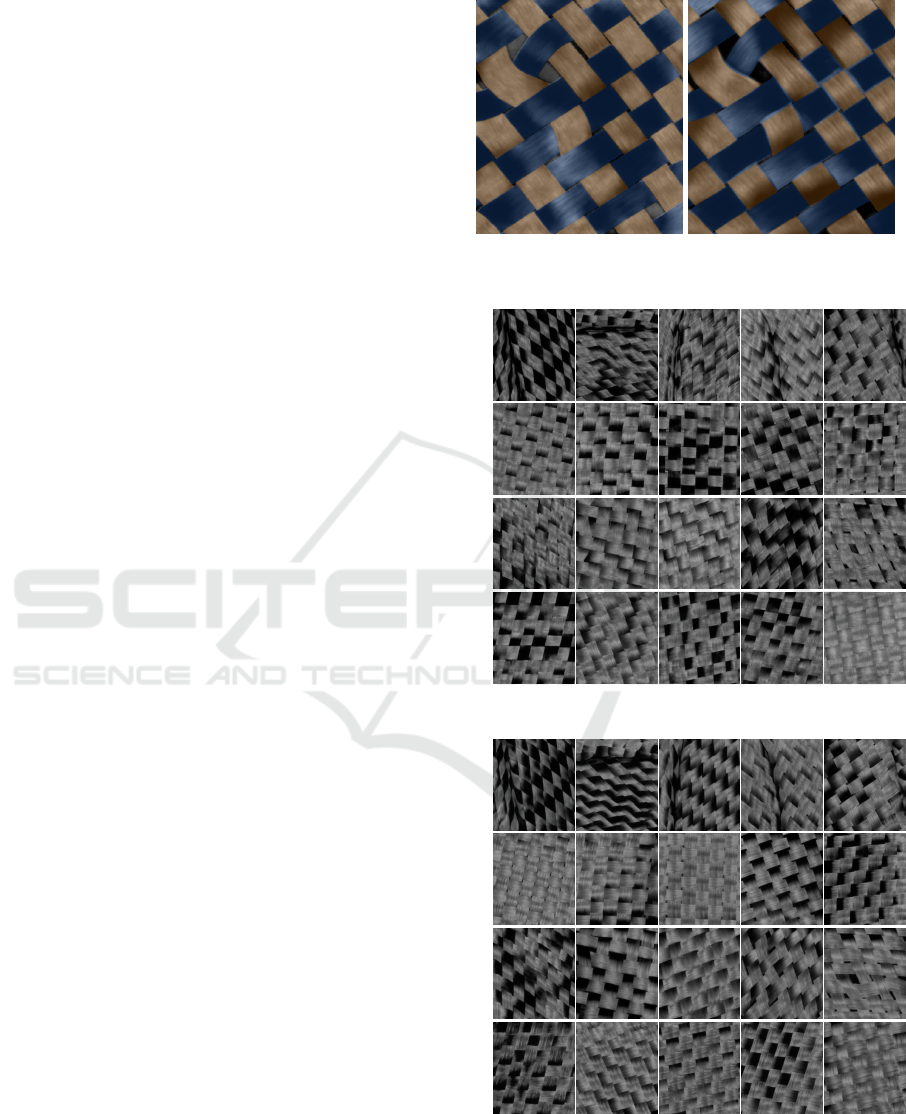
and output images (cf. Figure 4) reveals that both
architectures produce matching results, while the Ex-
tended U-Net architecture produces perfectly aligned
images and the results of StarGAN v2 deviate up to 4
pixels from segmentation inputs in some cases.
Additionally, we evaluate the influence of the la-
tent vectors by generating several results from each
segmentation map with different latent vectors. We
found that both generators are able to cover the full
spectrum of appearances in real images, i.e. variations
in lighting and shadows (cf. Figure 5) and Figure 6.
5.2 Evaluation on GAN Scores
A manual evaluation is not feasible to capture the en-
tire variance of generator outputs, as that would mean
inspection of thousands of images. Moreover, the va-
riety in possible outputs makes it difficult to assess
Extended U-Net StarGAN v2
Figure 4: Blending of segmentation maps with output im-
ages.
Fold
Gap
Ondulation
Regular
Figure 5: Results of Extended U-Net generator architecture.
Fold
Gap
Ondulation
Regular
Figure 6: Results of StarGAN v2 generator architecture.
which dataset is of higher quality. To address these
problems, we use GAN scores, more specifically: In-
ception Score (IS)(Salimans et al., 2016), Fr
´
echet
Controlled Synthesis of Fibre-reinforced Plastics Images from Segmentation Maps using Generative Adversarial Neural Networks
805

Inception Distance (FID)(Heusel et al., 2017), and
their conditional extensions Between-class (BCIS)
and Within-class (WCIS) IS, and Between-class (BC-
FID) and Within-class (WCFID) FID (Benny et al.,
2021). The conditional extensions provide additional
meaning for our specific approach, as our combi-
nation of segmentation map synthesis and image-
to-image generator can be interpreted as a class-
conditional image generator modelling p(x|c), with
the segmentation map synthesis modelling the distri-
bution p(s|c) of segmentation maps s conditioned on
conditional classes c and the image-to-image genera-
tor modelling p(x|s). Since our real dataset is imbal-
anced, we slightly modify scores by weighting sam-
ples depending on the number of instances per class
in order to ensure that each class contributes the same
amount to the final score. This ensures that every er-
ror class is equally important for the given use case.
5.2.1 Inception Score
To capture if our synthetic images match distinct
classes, we use the Inception Score (IS) (Salimans
et al., 2016). In their work, the authors defined the
score as the expectation of the Kullback-Leibler di-
vergence between the true class posterior p(t|x) and
the true class prior p(t) over the distribution p(x) of
images x defined by the generator or real dataset:
IS = exp
E
x∼p(x)
D
KL
(p(t|x) k p(t))
(1)
Usually, the expectation is estimated as an average
over all instances x
(i)
. To ensure that each class has
the same influence on the score result, we replace the
average by the following weighted average scheme:
IS ≈ exp
1
C
C
∑
c=1
1
N
c
N
c
∑
i
c
=1
D
KL
(p(t|x
(i
c
)
k ˆp(t))
!
ˆp(t) =
1
C
C
∑
c=1
1
N
c
N
c
∑
i
c
=1
p(t|x
(i
c
)
).
(2)
Hence, we first calculate an average over the N
c
instances within each class c then an average over the
C class averages. Thereby, we avoid domination of
the score result by classes with many instances. We
calculate the IS on 10 Inception v3 models (Szegedy
et al., 2016) trained on X
R
train
and average the IS re-
sults, since the IS is reported to show high variances
between different training runs(Barratt and Sharma,
2018). The training procedure is identical to the pro-
cedure used in 5.4. In the same manner of the IS,
we modify the BCIS and WCIS by assuming that the
class priors are equally distributed, i.e. p(c) =
1
C
.
Table 2: Inception scores and FID scores (compared to X
R
val
)
for different datasets.
Dataset IS BCIS WCIS FID BCFID WCFID
X
R
test
3.30 2.81 1.28 0.14 0.06 0.42
X
G
U-Net
2.22 1.64 1.35 41.38 37.93 51.76
X
G
StarGAN
2.20 1.48 1.49 61.00 60.11 74.30
X
R
test
achieves significant higher scores than both
synthetic datasets, while scores of X
G
U-Net
and X
G
StarGAN
only differ on a minor level (cf. Table 2). Note that
since we modified the final Inception v3 layer to pre-
dict 4 classes, the IS has an upper bound of 4 instead
of 1000 (Barratt and Sharma, 2018).
5.2.2 Fr
´
echet Inception Distance
To compare real and synthetic images on a feature dis-
tribution level, we use the Fr
´
echet Inception distance
(FID)(Heusel et al., 2017). The FID is defined as the
Fr
´
echet distance between the (assumed) normal dis-
tribution of Inception v3 feature vectors with mean
vectors µ
R
, µ
G
and covariance matrices Σ
R
, Σ
G
from
real and generated data, respectively:
FID = kµ
R
− µ
G
k
2
2
+ Tr
Σ
R
+ Σ
G
− 2(Σ
R
Σ
G
)
1
2
(3)
Analogous to our modification of the IS, we adapt the
estimate of the mean vector ˆµ and the covariance ma-
trix
ˆ
Σ to
ˆµ =
1
C
C
∑
c=1
1
N
c
N
c
∑
i
c
=1
f (x
(i
c
)
), (4)
and
ˆ
Σ
m,n
=
N
(N − 1)C
C
∑
c=1
1
N
c
N
c
∑
i
c
=1
( f (x
(i
c
)
)
m
− ˆµ
m
)( f (x
(i
c
)
)
n
− ˆµ
n
),
(5)
with f (x) denoting the extracted feature vector of an
instance x and N the total number of instances in the
dataset. In the same manner, we modify the BC-
FID and WCFID by assuming that the class priors are
equally distributed, i.e. p(c) =
1
C
. To obtain feature
vectors relevant for the use case, we extract them from
an Inception v3 models trained on X
R
train
instead of the
original model trained on ImageNet(Szegedy et al.,
2016; Deng et al., 2009) and average the score results
from 10 different training runs. As a reference dataset
representing the real data we use X
R
val
. The FID scores
(cf. Table 2) indicate that both synthetic datasets dif-
fer significantly from the real dataset in terms of fea-
tures, while the feature distribution of X
G
U-Net
is more
similar than the one of X
G
StarGAN
.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
806

Figure 7: Feature distribution mapped in 2D using UMAP.
5.3 Evaluation of Distribution
The FID only compares datasets in terms of an esti-
mated normal distribution over the extracted feature
vectors. However, the assumption of a normal dis-
tribution is not always justified. To further investi-
gate the feature distributions of our real and synthetic
datasets, we extract for all datasets the feature vec-
tors from an Inception v3 model trained on X
R
train
and
map them into two-dimensional space using UMAP
(McInnes et al., 2020). The UMAP embedding is
learned on the features of X
R
full
. Instances are plot-
ted in random order to prevent a biased representation
due to a specific class-order within the instances.
The scatter plot of the reduced features (cf. Fig-
ure 7) reveals that, although there are notably differ-
ences between the cluster boundaries, there is a strong
correlation between the feature distributions of real
and synthetic data. Our synthetic images do not cover
the full real data distribution, which can be partly ex-
plained by three main factors: the scarce training data,
which do not cover all parts of the distribution ade-
quately, the generator model, which possibly is not
able to learn certain features from the training data,
and our segmentation map generation method, which
only allows to generate simple segmentation maps.
The latter might also be an explanation for the un-
sharp cluster boundaries, as we deliberately created
segmentation maps close to the class boundaries in
order to generate hard samples and increase the aug-
mentation effect of the synthetic data.
We also tried to create the same scatter plots with
feature vectors extracted from the original Inception
v3 model trained on a ImageNet, but UMAP failed to
Figure 8: Accuracy and precision for different values of τ.
produce a cluster structure. This can be interpreted
as a lack of information in the extracted features and
corroborates our decision not to use this model for the
FID.
5.4 Evaluation on Classification Use
Case
We consider a test with the use case as the most im-
portant evaluation method, as the most realistic im-
ages might be worthless if they do not serve the use
case and even the least realistic images might have
benefits for specific applications.
With regard to our quality assurance use case, we
set up a classification task based on the error classes
of our training dataset. To keep it consistent with the
GAN scores, we use the Inception v3 model and train
it on X
R
train,min
to create a baseline. To improve the
baseline and demonstrate that our synthetic images
exceed the usage of vanilla image augmentations, we
apply flipping, rotations, and colour augmentations
during training. The training procedure, i.e. learn-
ing rate adaptation and fine-tuning, is completely au-
tomatised and kept constant through all experiments
to minimise human bias on the results. The real train-
ing data is augmented by sampling a fixed fraction τ
of training instances from the augmenting synthetic
dataset (X
G
U-Net
or X
G
StarGAN
). From each training run,
the model with the highest accuracy on X
R
val
is used.
We measure accuracy and precision of the trained
model on X
R
test
and average the results over 10 train-
ing runs, as they slightly vary depending on parameter
initialisation and training sample selection. Figure 8
summarises our results for different values of τ. Note
Controlled Synthesis of Fibre-reinforced Plastics Images from Segmentation Maps using Generative Adversarial Neural Networks
807

Figure 9: Confusion matrices of X
train,min
from left to right:
no augmentation (τ = 0), augmented with X
G
U-Net
(τ = 0.8),
augmented with X
G
StarGAN
(τ = 0.8).
that we calculate accuracy and precision from a con-
fusion matrix, that is normalised over rows, to avoid
bias by many instances in certain classes.
Our results confirm that our synthetic images can
significantly improve the performance of a classifier
when being used as data augmentation. The actual
performance improvements depend less on the gen-
erator architecture as on τ. We found that for both
datasets the peak performance is achieved at τ = 0.8.
Moreover, the (normalised) confusion matrices
show that the recall improved for every class when
synthetic data augmentation was applied during train-
ing, while augmentations with X
G
U-Net
and X
G
StarGAN
lead to comparable results despite of their different
scores in 5.2 (cf. Figure 9). We find that the con-
fusion matrix is the better alternative to the inception
scores in order to evaluate class-conditional GANs, as
it takes into account the correct/conditional class of
an image and breaks down the scores of results within
the different classes.
6 CONCLUSION
In this work we showed that GANs can effectively be
used to generate synthetic FRP images for the purpose
of data augmentation in a data scarce environment.
In our implementation we adapted BicycleGAN and
tested two generator architectures, namely Extended
U-Net and StarGAN v2. We were able to achieve the
goal of generating realistic textile images with both
architectures.
The generated images in this work are thoroughly
validated in four different ways. Firstly, a qualitative
visual inspection was performed to judge the realism
of the generated images. Secondly, two scores were
implemented, namely IS and FID with their respective
class-conditional versions, to add an objective quanti-
tative inspection. Thirdly, the distribution of original
and synthetic images were compared in terms of their
feature clustering structure using UMAP. It was found
that the synthesised images share a high overlap with
the real images, but do not cover the distribution of
the real images and are therefore less varied. Lastly, a
classifier was trained to predict the type of error found
in the images, where using a mix of real and synthe-
sised data significantly improved the performance of
the classification model.
In future work, we plan to extend our approach
to three-dimensional weaves. This would emphasise
the effects of certain defects, such as ondulations and
folds, which would require either 3D segmentation
maps, or a combination of 2D segmentation from dif-
ferent angles. The output of such model could be 3D
textile objects. Furthermore, we want to explore dis-
entanglement learning methods for generative models
to remove the necessity of segmentation maps for a
controlled synthesis of FRP images.
With our contribution we show that generative ad-
versarial networks are usable in an industrial use case
of manufacturing FRP. They are capable to learn high-
level feature representations of the observation from
which they synthesise new realistic and useful im-
ages. In order to further investigate the learned repre-
sentations in the future, we believe that feature disen-
tanglement methods may unravel meaningful knowl-
edge about the underlying manufacturing process.
ACKNOWLEDGEMENTS
Funded by the Deutsche Forschungsgemeinschaft
(DFG, German Research Foundation) under Ger-
many’s Excellence Strategy - EXC-2023 Internet of
Production - 390621612. Simulations were per-
formed with computing resources granted by RWTH
Aachen University under project thes0947.
REFERENCES
Barratt, S. and Sharma, R. (2018). A Note on the Inception
Score.
Benny, Y., Galanti, T., Benaim, S., and Wolf, L. (2021).
Evaluation metrics for conditional image genera-
tion. International Journal of Computer Vision,
129(5):1712–1731.
Berger, G. and Memisevic, R. (2017). Incorporating long-
range consistency in cnn-based texture generation.
ArXiv, abs/1606.01286.
Choi, Y., Uh, Y., Yoo, J., and Ha, J. W. (2020). Stargan
v2: Diverse image synthesis for multiple domains. In
2020 IEEE/CVF Conference on Computer Vision and
Pattern Recognition (CVPR), pages 8185–8194.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). ImageNet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255,
Piscataway, NJ. IEEE.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
808

Fayyaz, R. A., Maqbool, M., and Hanif, M. (2020). Textile
design generation using gans. In 2020 IEEE Canadian
Conference on Electrical and Computer Engineering
(CCECE), pages 1–5.
Fuhr, J.-P. (2017). Schichtbasierte Modellierung von Ferti-
gungseffekten in der Struktursimulation von Faserver-
bundwerkstoffen. Verlag Dr. Hut.
Gatys, L., Ecker, A. S., and Bethge, M. (2015). Texture syn-
thesis using convolutional neural networks. Advances
in Neural Information Processing Systems, 28.
Goodfellow, I. J., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial networks.
Heusel, M., Ramsauer, H., Unterthiner, T., Nessler, B., and
Hochreiter, S. (2017). GANs Trained by a Two Time-
Scale Update Rule Converge to a Local Nash Equi-
librium. In I. Guyon, U. V. Luxburg, S. Bengio, H.
Wallach, R. Fergus, S. Vishwanathan, and R. Garnett,
editors, Advances in Neural Information Processing
Systems, volume 30, pages 6626–6637. Curran Asso-
ciates, Inc.
Jetchev, N., Bergmann, U., and Vollgraf, R. (2017). Texture
synthesis with spatial generative adversarial networks.
Jing, J.-F., Ma, H., and Zhang, H.-H. (2019). Automatic
fabric defect detection using a deep convolutional neu-
ral network. Coloration Technology, 135(3):213–223.
K. He, X. Zhang, S. Ren, and J. Sun (2016). Deep Residual
Learning for Image Recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Liu, G., Gousseau, Y., and Xia, G.-S. (2016). Texture
synthesis through convolutional neural networks and
spectrum constraints. In 2016 23rd International Con-
ference on Pattern Recognition (ICPR), pages 3234–
3239.
McInnes, L., Healy, J., and Melville, J. (2020). Umap: Uni-
form manifold approximation and projection for di-
mension reduction.
Miao, M. and Xin, J. H. (2018). Engineering of high-
performance textiles. The Textile Institute Book Se-
ries. Woodhead Publishing.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-Net:
Convolutional Networks for Biomedical Image Seg-
mentation. In Navab, N., Hornegger, J., Wells, W. M.,
and Frangi, A. F., editors, Medical image computing
and computer-assisted intervention - MICCAI 2015,
Lecture notes in computer science, pages 234–241,
Cham and Heidelberg and New York and Dordrecht
and London. Springer.
S. Schreiber, J. Geldenhuys, and H. de Villiers (2016).
Texture synthesis using convolutional neural networks
with long-range consistency and spectral constraints.
In 2016 Pattern Recognition Association of South
Africa and Robotics and Mechatronics International
Conference (PRASA-RobMech), pages 1–6.
Sacco, C., Radwan, A. B., Beatty, T., and Harik, R. (2019).
Machine learning based afp inspection: A tool for
characterization and integration. In SAMPE 2019
Conference & Exhibition. Charlotte, NC: SAMPE.
doi, volume 10, pages 19–1594.
Sacco, C., Radwan, A. B., Harik, R., and Van Tooren, M.
(2018). Automated fiber placement defects: Auto-
mated inspection and characterization. In Proceedings
of the SAMPE 2018 Conference and Exhibition, Long
Beach, CA, USA, pages 21–24.
Salimans, T., Goodfellow, I., Zaremba, W., Cheung, V.,
Radford, A., and Chen, X. (2016). Improved Tech-
niques for Training GANs. In D. Lee, M. Sugiyama,
U. Luxburg, I. Guyon, and R. Garnett, editors, Ad-
vances in Neural Information Processing Systems,
volume 29, pages 2234–2242. Curran Associates, Inc.
Shorten, C. and Khoshgoftaar, T. M. (2019). A survey on
image data augmentation for deep learning. Journal
of Big Data, 6(1):1–48.
Szegedy, C., Vanhoucke, V., Ioffe, S., Shlens, J., and Wojna,
Z. (2016). Rethinking the Inception Architecture for
Computer Vision. In 2016 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
2818–2826.
T
¨
ure, Y. and T
¨
ure, C. (2020). An assessment of using
aluminum and magnesium on co2 emission in euro-
pean passenger cars. Journal of Cleaner Production,
247:119120.
Wei, B., Hao, K., Tang, X.-s., and Ding, Y. (2019). A
new method using the convolutional neural network
with compressive sensing for fabric defect classifica-
tion based on small sample sizes. Textile Research
Journal, 89(17):3539–3555.
Xian, W., Sangkloy, P., Agrawal, V., Raj, A., Lu, J., Fang,
C., Yu, F., and Hays, J. (2018). Texturegan: Control-
ling deep image synthesis with texture patches. pages
8456–8465.
Yi, X., Walia, E., and Babyn, P. (2019). Generative adver-
sarial network in medical imaging: A review. Medical
Image Analysis, 58:101552.
Zhu, J.-Y., Zhang, R., Pathak, D., Darrell, T., Efros, A. A.,
Wang, O., and Shechtman, E. (2017). Toward multi-
modal image-to-image translation. In I. Guyon, U. V.
Luxburg, S. Bengio, H. Wallach, R. Fergus, S. Vish-
wanathan, and R. Garnett, editors, Advances in Neural
Information Processing Systems 30, pages 465–476.
Curran Associates, Inc.
Zhu, X., Liu, Y., Li, J., Wan, T., and Qin, Z. (2018). Emo-
tion classification with data augmentation using gen-
erative adversarial networks. In Phung, D., Tseng,
V. S., Webb, G. I., Ho, B., Ganji, M., and Rashidi, L.,
editors, Advances in Knowledge Discovery and Data
Mining, Lecture notes in computer science, pages
349–360, Cham. Springer International Publishing.
Controlled Synthesis of Fibre-reinforced Plastics Images from Segmentation Maps using Generative Adversarial Neural Networks
809
