
Exploring the Tabu Search Algorithm as a Graph Coloring Technique for
Wavelength Assignment in Optical Networks
In
ˆ
es Gomes
2
, Lu
´
ıs Cancela
1,2
and Jo
˜
ao Rebola
1,2
1
Optical Communications and Photonics Group, Instituto de Telecomunicac¸
˜
oes, Lisboa, Portugal
2
Department of Science and Information Technology, Instituto Universit
´
ario de Lisboa (ISCTE-IUL), Lisboa, Portugal
Keywords:
Graph Coloring, Greedy, Optical Networks, Tabu Search, Wavelength Assignment.
Abstract:
The aim of this work is to study the Tabu Search algorithm as a graph coloring technique for wavelength
assignment in optical networks, a crucial function in optical network planning. The performance of the Tabu
Search is assessed in terms of the number of wavelengths and computation time and is compared with the one
of the most common Greedy algorithm. It is concluded that for real networks with a large number of nodes
and a higher variance node degree of the path graph relatively to its average node degree value, the Greedy
algorithm is preferable to the Tabu Search algorithm since it returns the same number of colors of Tabu Search,
but in a shorter computation time.
1 INTRODUCTION
Routing and Wavelength Assignment (RWA) are fun-
damental functions to transport data in an efficient
way in optical networks (Winzer et al., 2018). Rout-
ing is responsible for finding the best path for a given
traffic demand, and wavelength assignment (WA) is
responsible for choosing an appropriate wavelength in
that path to transport the given traffic demand taking
into account the wavelength continuity and the dis-
tinct wavelength constraints (Simmons, 2014).
Several techniques have been used to solve the
WA problem, ranging from exact algorithms to
heuristics that typically give a sub-optimal solution
to the problem, but in a shorter time, like the First-
Fit or the Most Used algorithms (Simmons, 2014),
(Zangy et al., 2000). Graph coloring techniques, al-
though applied to a large range of applications, such
as constructing schedules, can also be used for WA
in optical networks (Simmons, 2014). The most used
graph coloring algorithm for WA is the Greedy algo-
rithm (Lewis, 2016). Some studies have, however,
used other Graph coloring algorithms for WA, such
as the DSATUR and RLF (Duarte et al., 2021), but
for the majority of the networks studied the Greedy
algorithm performs as well as these algorithms.
In this work we aim to study a more complex and
more rigorous graph coloring technique for WA in op-
tical networks, the Tabu Search algorithm. A perfor-
mance study is made for several network topologies in
terms of the number of colors and computation time.
Moreover, a detailed comparison with the the Greedy
algorithm is performed. The aim of these algorithms,
considering a static network scenario, is to find the
minimum number of wavelengths that satisfies all the
traffic demands, in a feasible and reasonable compu-
tational time.
Note that the Tabu Search algorithm is a meta-
heuristic algorithm used for solving different kinds
of problems, such as optimization problems in net-
work design (Pi
´
oro and Medhi, 2004). For example,
it has been used for solving RWA problems based on
Integer Linear Programing (ILP) formalisms (Wang,
2004), (Go
´
scie
´
n et al., 2014), (Dzongang et al., 2005).
Moreover, in (Hertz and Werra, 1987) this algorithm
has been used to solve graph coloring problems. But,
to the best of our knowledge, there are no works that
have used it as a graph coloring technique for WA in
optical networks, as we do in this work.
This paper is organized as follows. In Section
2, the Greedy and Tabu Search graph coloring algo-
rithms are explained and their pseudocodes and illus-
trative examples provided. In Section 3, the perfor-
mance of the Tabu Search algorithm in random graphs
and its comparison with the Greedy algorithm is stud-
ied. In Section 4, the RWA planning tool is briefly
described and the performance of both algorithms as
graph coloring techniques for WA in optical networks
is assessed for several real networks. Finally, in Sec-
tion 5, the conclusions are drawn.
Gomes, I., Cancela, L. and Rebola, J.
Exploring the Tabu Search Algorithm as a Graph Coloring Technique for Wavelength Assignment in Optical Networks.
DOI: 10.5220/0010910000003121
In Proceedings of the 10th International Conference on Photonics, Optics and Laser Technology (PHOTOPTICS 2022), pages 59-68
ISBN: 978-989-758-554-8; ISSN: 2184-4364
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
59
2 GRAPH COLORING
ALGORITHMS
In this section, the Greedy and Tabu Search algo-
rithms, are explained through their respective pseu-
docode and an illustrative example is given.
2.1 Greedy Algorithm
The Greedy algorithm is probably the most used
graph coloring algorithm (Lewis, 2016). It consists
in coloring the vertices of a given graph one by one,
with some ordering strategy, so that adjacent vertices
have different colors (Lewis, 2016).
Figure 1 shows the pseudocode for Greedy algo-
rithm (Lewis, 2016). Initially S that represents the
set of colors that are going to be assigned along the
Greedy algorithm process is empty and π represents
a possible permutation of the graph vertices, e.g. de-
scending, ascending or random order of the vertices.
The for cycle in line (1) of the pseudocode goes
through the set of vertices π and, for each vertex of
π tries to find a color class S
j
belonging to S to which
it can be associated. This process involves checking
the color class of the adjacent vertices. If the working
vertex is an independent set then a color S
j
can be as-
signed to this vertex. If this is not the case then a new
color class must be assigned (lines 7 to 9).
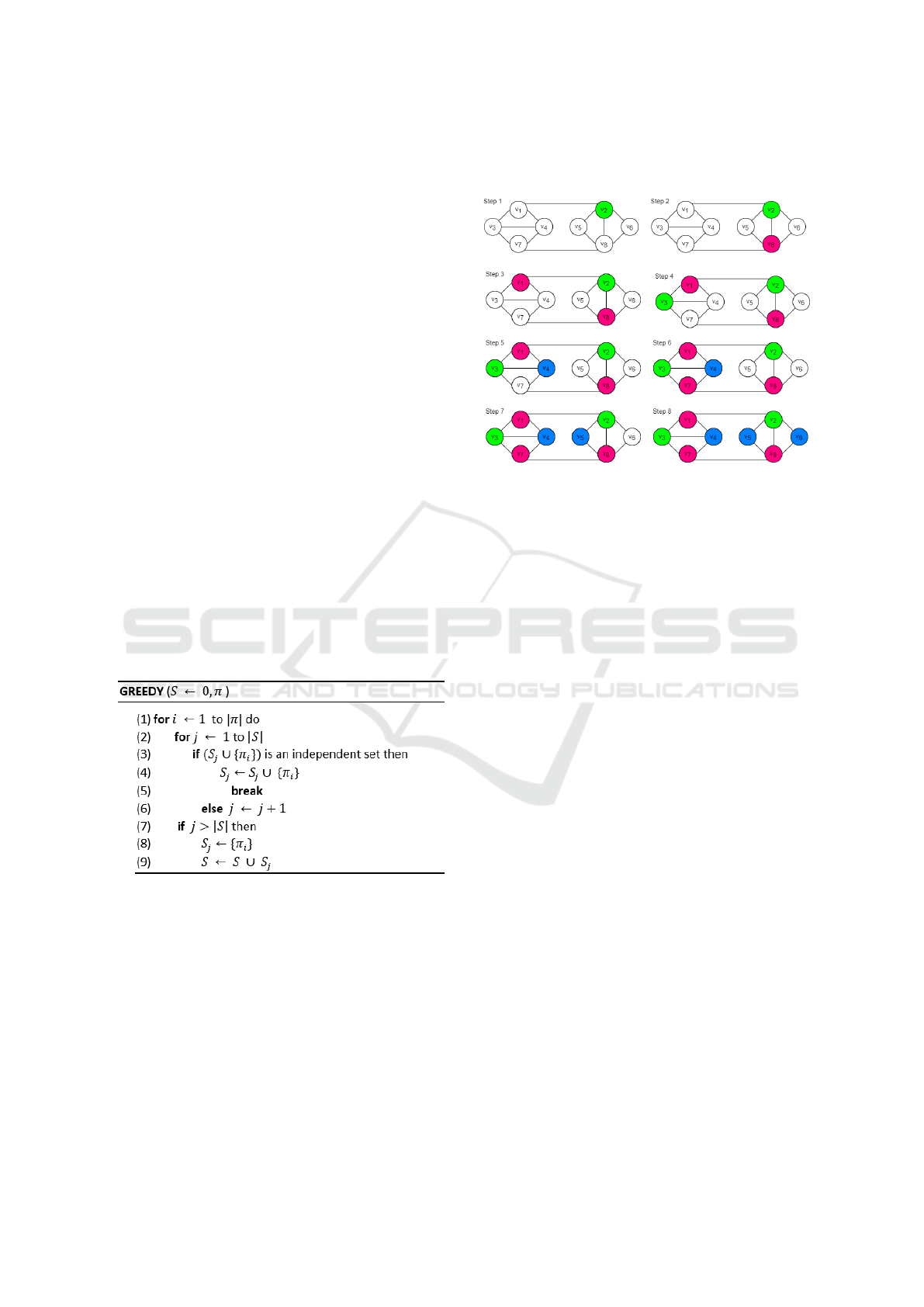
Figure 1: Pseudocode for Greedy algorithm.
Figure 2 represents an example of the operation of
the Greedy algorithm, assuming a coloring strategy
based on the descending order of degree. The ver-
tex with the highest number of links connected, i.e.,
the highest vertex degree, is colored first, i.e. v
2
in
step 1 is color with green (S
1
={green}). In step 2 the
algorithm continues the coloring with the following
highest vertex degree, v
8
, which is adjacent to v
2
so
it is assigned to a different color, pink (S
2
={pink}).
In step 3, since there are four vertices with degree 3,
one of them is randomly chosen. We have choose v
1
with the color class S
2
(step 4). This process contin-
ues until all vertices have been colored and in the end
(step8) we can see that three colors are used.
Figure 2: Greedy algorithm example.
2.2 Tabu Search Algorithm
Tabu Search is a metaheuristic algorithm, used to
solve different kinds of problems, such as graph col-
oring (Lewis, 2016). The idea of this algorithm, when
applied to graph coloring problems, is to answer the
following question: given a graph G(V,E), where V
represent the set of vertices and E the set of edges be-
tween vertices, is it possible to feasibly color it with k
colors? This algorithm has the following main steps:
1. It starts by defining an initial solution S to color
the graph with a predefined value k of colors,
which can be obtained randomly or by using a
constructive heuristic, like Greedy or DSATUR
(Lewis, 2016).
2. The algorithm next proceeds by computing the
number of clashes (i.e. two adjacent vertices with
the same color) which is represented by function
f(S), defined by:
f (S) =
∑
∀{u,v}∈E
g(u, v) (1)
with g(u,v)=
(
1 ifc(u)=c(v),
0 otherwise.
where c(u) is the color of vertex u and c(v) is the
color of vertex v.
If g(u,v) = 1 it means that the color of the two
adjacent vertices u and v is the same and there-
fore a clash occurs. The aim of the algorithm is to
eliminate the clashes, i.e., f (S) = 0. If the num-
ber of clashes is not zero, a new solution S’ is ob-
tained, by using the neighbor operator, which is
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
60
defined as follows: if a vertex v is assigned to a
color i, a neighbor operator corresponds to a color
change of vertex v to a new color j. Note that to
obtain this new solution S’ there are some ver-
tices color changes that can not be done. These
vertices color changes are registered in a list of
forbidden vertices color changes, called the Tabu
list T. This list is used to avoid previous unde-
sired and already checked solutions (Hertz and
Werra, 1987). If with this new solution S’ condi-
tion f (S
0
) < A( f (S)) is verified, the best solution
S’ is found. In this condition, A is an “aspiration
level” function that gives the possibility that so-
lutions S’ with a superior number of clashes be
chosen, with the aim to escape from local minima
(Hertz and Werra, 1987). If f (S
0
) = 0 and number
of operations (Niter) is less than Nmax it means
that a solution with k colors is found. If the num-
ber of operations is Nmax the algorithm stops.
3. If a solution with k colors is found the algorithm
starts again with k-1 colors.
Figure 3 shows the pseudocode of the Tabu Search
algorithm, which follows the previous explanation.
The pseudocode is initialize by defining an initial so-
lution S and the Tabu list T size. While clashes occur,
i.e., f (S) > 0, a new solution S’ is searched, the con-
dition f (S
0
) < A( f (S)) is checked and the Tabu list T
is updated.
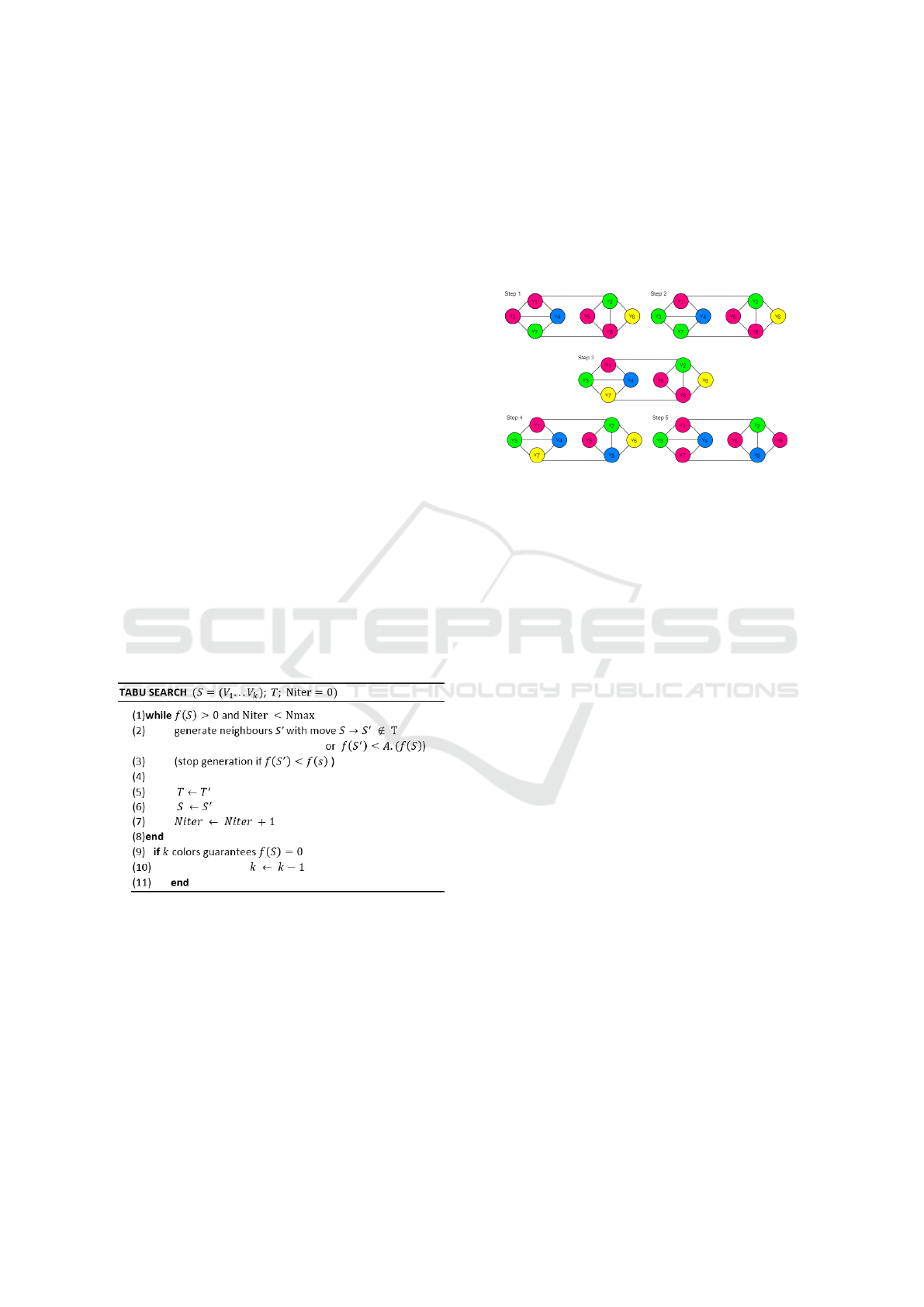
Figure 3: Pseudocode for Tabu Search algorithm.
If a solution with k colors ensures that the number
of clashes is zero, the algorithm tries a solution with
k−1 colors (lines 9-10). The algorithm stops when no
solution with k − 1 colors is achieved or the number
maximum of iterations is reached.
Figure 4 represents the same network of Figure
2, but now the coloring is going to be made with
the Tabu Search algorithm. The algorithm starts with
a random coloring solution (step 1). In this case,
this random solution has 4 colors and 2 clashes, so
f (S
0
) = 2. Once the solution has clashes, the algo-
rithm generates a new solution S’. In step 2, the neigh-
bor operator works in the vertex 3 changing the color
pink to green. This operation eliminate the clash that
occurs between vertices 1 and 3, but a new clash ap-
pears between vertices 3 and 7, keeping the number
of clashes equal to 2. The Tabu list T is updated with
this move, i.e., vertex 3 changes from pink to green.
Figure 4: Tabu Search algorithm example.
In step 3, the clash between vertices 3 and 7 is
eliminated and a better solution is found that reduces
the number of clashes to one, between adjacent ver-
tices 5 and 8. In this step, the neighbor operator works
in vertex 7, coloring it with yellow, which is one of the
four initial colors of the solution. The Tabu list T is
updated again, with the addition of the move corre-
sponding to vertex 7 colored in green. Thus, in step 3
there is a solution with 4 colors and one clash between
vertices 5 and 8.
In step 4 occurs the coloring of vertex 8 with blue.
Thus, all clashes are eliminated, i.e., f (S) = 0 and
a complete proper k coloring is found with k=4. At
this stage, the algorithm tries the solution k=3 colors.
If vertices 6 and 7 are colored with pink (step 4) or
vertices 1 and 5 are colored with yellow, this solu-
tion is feasible, with a total of k colors smaller than
initially tested, making it a better solution. Next, the
algorithm tries the solution with k=2 colors, but no
solution with proper coloring is found, so, k=3 is the
minimum number of colors.
3 PERFORMANCE OF THE TABU
SEARCH ALGORITHM IN
RANDOM GRAPHS
In this section, we study the performance of the Tabu
Search algorithm in random graphs, and compare its
performance with the one of Greedy algorithm with
descending order. We have used the implementation
of these algorithms available in (Lewis, 2016). But,
first, we analyze the influence of the number of con-
straint checks (Lewis, 2016) on the accuracy of the
Exploring the Tabu Search Algorithm as a Graph Coloring Technique for Wavelength Assignment in Optical Networks
61
Tabu Search algorithm, in order to minimize the re-
spective computation time.
Random graphs, G
n,p
, are graphs with n ver-
tices characterized by the parameter p, which corre-
sponds to the probability of two vertices being adja-
cent (Lewis, 2016). The parameter p can be given by
p =
∑
n
i=1
Dg
i
n−1
n
(2)
where Dg
i
is the degree of vertex i and n is the number
of vertices.
Random graphs are built by generating random
matrices with a n × n dimension according to the pa-
rameter p. Each matrix position represents a pair of
vertices; if its value is one it means that the vertices
are adjacent, if its value is zero, the vertices are non-
adjacent. These values are randomly generated using
a uniform distribution. In particular, when p = 1, it
means that the degree of any vertex of the matrix is
n − 1, i.e., all vertices of the matrix are adjacent to
each other.
3.1 Influence of the Number of
Constraint Checks
In order to compute the time needed for the Tabu
Search algorithm to provide a graph coloring solution,
we first analyze the minimum number of constraint
checks needed to achieve the best solution. Constraint
checks are the operations within the Tabu Search al-
gorithm that involve information requests about the
graph, such as determining the degree of a vertex, or
determining if two vertices are adjacent or not (Lewis,
2016).
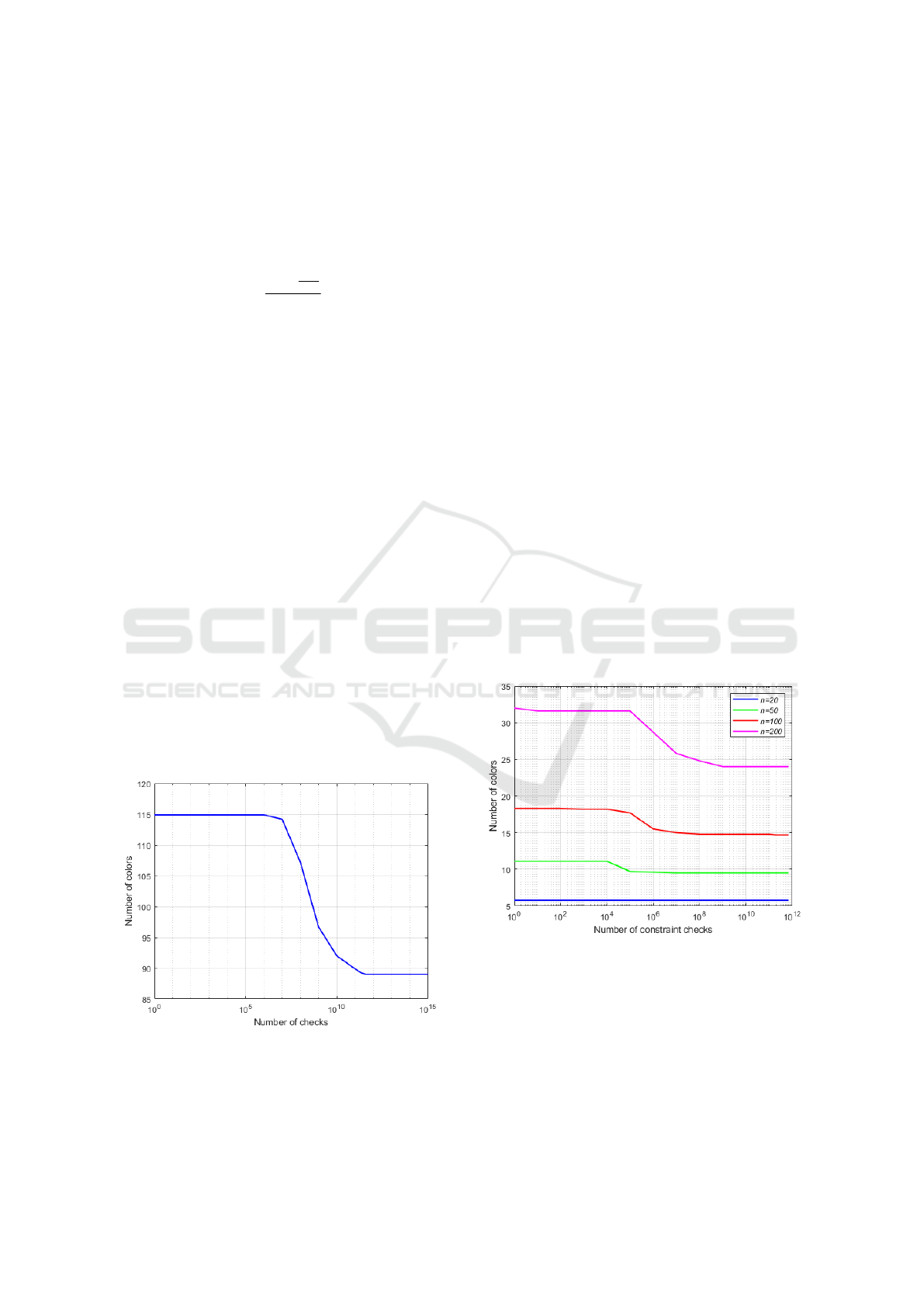
Figure 5: Number of colors as a function of the number of
constraint checks considering the Tabu Search algorithm for
n = 1000 and p = 0.5.
In Figure 5, the number of colors as a function
of the number of constraint checks is represented for
n = 1000 and p = 0.5, considering the generation
of 10 random graphs for each number of constraint
checks. As can be observed, the number of colors is
minimized only when the number of checks is above
1 × 10
11
. From that point on, the number of colors
remains practically constant. Thus, for n = 1000, a
number of constraint checks of 4 × 10
11
is sufficient
to ensure that the optimal solution is reached. It was
confirmed that the parameter p does not influence the
number of constraint checks required to achieve the
minimum number of colors with the Tabu Search.
This number only depends on the size of the graph.
Figure 6 shows the evolution of the number of
colors for Tabu Search algorithm as the number of
constraint checks increases for n = 20, 50, 100 and
200 and p = 0.5. The number of constraint checks
in this study is between 1 and 1 × 10
12
. From Fig-
ure 6, it can be concluded that for n = 20, only one
constraint check is needed to obtain the best solution.
Likewise for n = 50, n = 100 and n = 200, a num-
ber of constraint checks above, respectively, 1 × 10
7
,
1 × 10
8
and 1 × 10
9
is needed to obtain the best so-
lution. Below these values of constraint checks, the
required number of colors increases with the graph
size, as expected. In what concerns to the compu-
tational effort, as n decreases, the required number of
constraint checks that minimizes the number of colors
also decreases, and therefore the computation time for
lower n will be lower as well.
Figure 6: Number of colors as a function of the number
of constraint checks imposed on Tabu Search for p = 0.5
considering different values of n.
The study of the number of constraint checks
needed by the Tabu Search algorithm to minimize the
number of colors for each graph was carried out to
save computation time and is shown in Figure 7. The
number of constraint checks, as observed in Figure
7 for the Tabu Search curve, depends remarkably on
the number of vertices, n, in the graph. This study
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
62

has been performed considering 25 simulations for a
parameter p = 0.5. However, from extensive simu-
lation results, it has been concluded that there is no
dependence between the number of constraint checks
required and the parameter p. Thus, regardless the
value of p, from Figure 7, it is possible to obtain an
approximation for the required number of constraint
checks for any number of vertices n that minimizes
the number of colors in a random graph. To obtain
such approximation in Figure 7, a curve fitting has
been performed relatively to the Tabu Search curve,
including linear, quadratic, cubic and fourth degree
fittings. Note that for proper fitting, the logarithm
base 10 of the number of checks has been used.
Figure 7: Number of constraint checks as function of the
number of vertices and some fitting curves.
As can be observed in Figure 7, the linear and
quadratic fittings, respectively, below n = 500 and
n = 300, predict a number of checks much smaller
than the one given by the Tabu Search. The cubic and
fourth degree fittings predict a very similar number
of constraint checks, but we prefer to use the cubic
fitting, because it represents a simpler function. The
cubic fitting is given by:
6.4×10
−8
n
3
−1.1×10
−4
n
2
+5.7×10
−2
n+1.9 (3)
3.2 Comparison with the Greedy
Algorithm
After studying the appropriate number of constraint
checks to use in the Tabu Search algorithm, the per-
formance of the Greedy and Tabu Search algorithms
in finding the optimal color solution is also studied
and compared considering random graphs.
Figure 8 a) shows the number of colors as a func-
tion of p for n = 1000 calculated using the Greedy
(with random and descending order) and the Tabu
Search algorithms. A very good agreement between
the Tabu Search results and the ones presented in Fig-
ure 4.6 of (Lewis, 2016) is found. It can be observed
from Figure 8 a) that for p = 0 and p = 1, there are
no difference between the algorithms in the number
of colors, as these are the cases where no adjacency
and full adjacency between vertices occur, respec-
tively. That is, if the vertices are all non-adjacent,
the same color, independently of the algorithm, can
be applied to all vertices. Similarly, if all vertices are
adjacent between each other, then each vertex is as-
signed its own color. Also from Figure 8 a), we can
observe that the Tabu Search needs fewer colors than
the Greedy algorithm, and that the difference in the
number of colors increases with p, but the relative
percentage increase is always around 40%. For ex-
ample, for p = 0.1, the Tabu Search gives 21 colors
and the Greedy 30 colors, which is an increase of 9
colors (43 % increase); for p = 0.5, the Tabu Search
provides 89 colors and the Greedy gives 125 colors,
which is an increase of 36 colors (40 % increase) and
for p = 0.9, the Tabu Search gives 229 colors and the
Greedy gives 313 colors, which is an increase of 84
colors (37 % increase). Although in Figure 8 a) the
results obtained with Greedy random and Greedy de-
scending orders seem to be very similar, in the inset
of Figure 8 a), it can be seen that the descending order
gives always slightly better results (1 color difference)
(Duarte, 2020).
Figures 8 b) and c) shows again the performance
of both Greedy and Tabu Search algorithms for ran-
dom graphs, but for 100 and 20 vertices, respectively,
as a function of p. As observed in Figures 8 b) and
c), it can be concluded that the Tabu Search per-
forms once again better than the Greedy algorithm by
predicting less colors and this behavior is more pro-
nounced for increasing values of n and p.
To better understand the conclusions presented in
Figure 8, Figure 9 shows the increase in percentage
of the number of colors as a function of p predicted
by the Greedy algorithm in comparison with the Tabu
Search, considering n = 20, 50, 100, 200, 1000. Note
that 25 simulations were performed to obtain the re-
sults presented.
From Figure 9, it can be concluded that the greater
the number of vertices in the graph, the greater the
percentage growth. The maximum value found is
around 40%. For p = 0.1 and n = 200, there is a max-
imum 40% increase in the number of colors used by
the Greedy algorithm in comparison with the number
of colors predicted by the Tabu Search, whereas, for
n = 100, there is only 32% increase, for n = 50, there
is 10% increase and, for n = 20, there is only 3% in-
crease. From these results, it can be concluded that
Exploring the Tabu Search Algorithm as a Graph Coloring Technique for Wavelength Assignment in Optical Networks
63
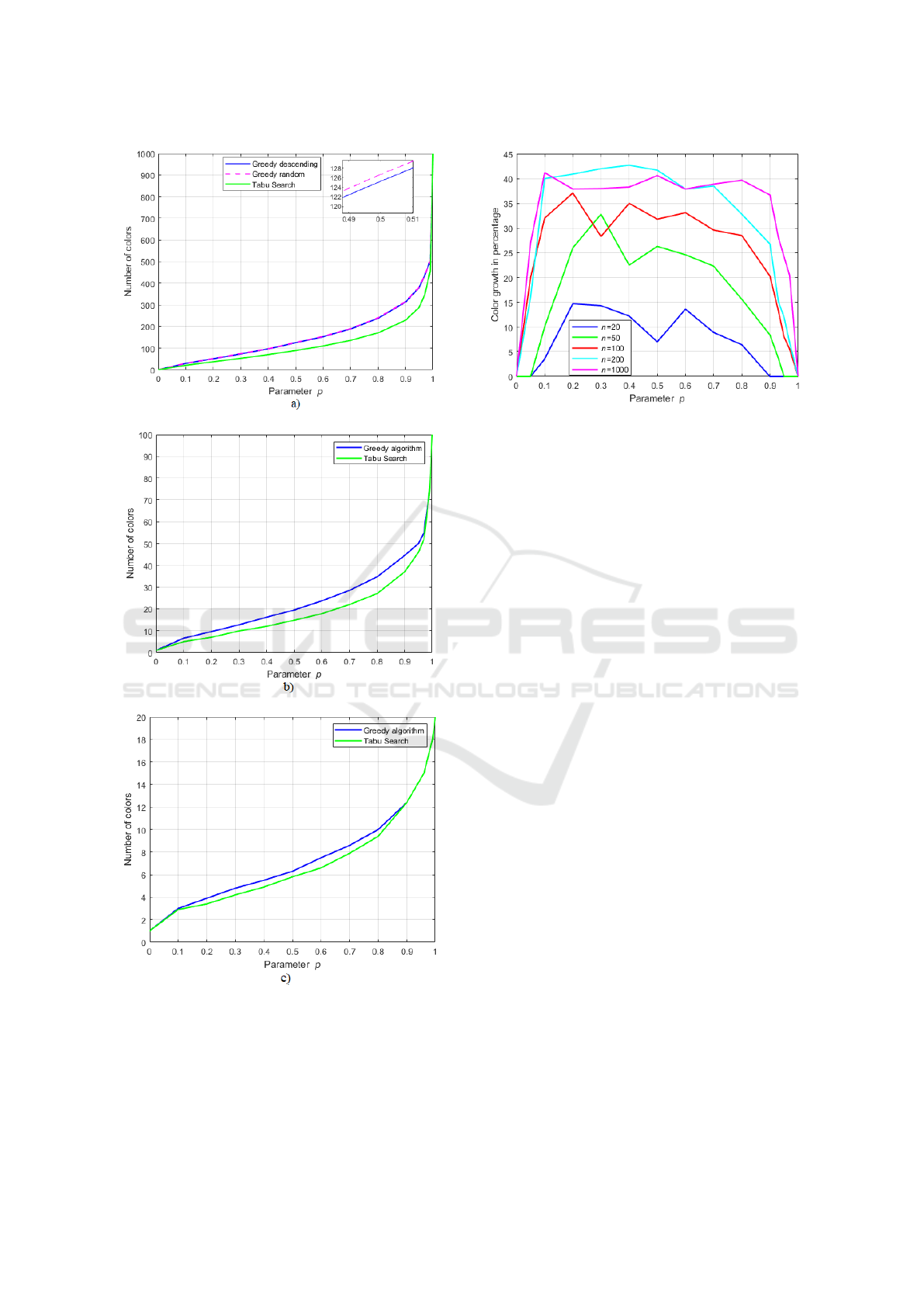
Figure 8: Number of colors as a function of p calculated
using the Greedy and Tabu Search algorithms for random
graphs for a) n = 1000, b) n = 100 and c) n = 20.
the decrease in the total number of colors attributed
by the Tabu Search in comparison with the Greedy is
more pronounced in graphs with more vertices.
Figure 9: Percentage of the number of colors increase be-
tween Tabu Search and Greedy algorithms for n = 20, n =
50, n = 100, n = 200 and n = 1000 as a function of p.
4 TABU SEARCH ALGORITHM
AS A GRAPH COLORING WA
TECHNIQUE
In this section, we assess the performance of the Tabu
Search algorithm as a graph coloring WA technique in
several real networks. A comparison with the Greedy
algorithm is also performed. But, first, we briefly out-
line the RWA planning tool used, as well as, the net-
work physical and logical topologies studied.
4.1 RWA Planning Tool
The planning tool used to solve the RWA problem
was developed in (Duarte, 2020) and extended in this
work in order to study the performance of the Tabu
Search algorithm as a graph coloring WA technique.
The planning tool has the following three main func-
tionalities:
1. Definition of the physical and logical topologies
characterized, respectively, by the adjacency and
the traffic matrices.
2. Routing algorithm based on the Yen’s k-shortest
path algorithm.
3. WA algorithms based on graph coloring tech-
niques: Greedy and Tabu Search algorithms. Note
that before using the Graph Coloring algorithms,
the path graph G(W, P) must be computed. This
graph is obtained from the graph G(V, E) that rep-
resents the physical topology. The vertices of
G(W, P) represent the optical paths and P rep-
resents the set of links between those vertices
(Duarte, 2020). These links are between one or
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
64
more vertices (i.e. paths) that share one or more
physical links. After obtaining the graph G(W, P),
the vertices can be colored considering the Greedy
and the Tabu Search algorithm explained in Sec-
tion 2. The number of colors obtained corre-
sponds to number of wavelengths needed for solv-
ing the RWA problem.
4.2 Parameters of the Network Physical,
Logical and Path Topologies
The network physical topologies used in this work
are the COST239 (Niksirat et al., 2016), NSFNET
(LaQuey, 1990), UBN (Biernacka et al., 2017) and
CONUS with 30 nodes (Monarch Network Archi-
tects, 1999), which we denominate in this work as real
networks.
A network physical topology can be characterized
by several parameters such as the average node degree
and the variance node degree, respectively, given by
(Fenger et al., 2000):
d =
∑
n
i=1
Dg
i
n
(4)
σ
2
d
=
∑
n
i=1
(Dg
i
− d)
2
n − 1
(5)
Table 1: Real networks physical topology parameters.
Average Variance
Network Nodes Links Node Node
Degree Degree
COST239 11 26 4.7 0.4
NSFNET 14 21 3.0 0.3
UBN 24 43 3.6 0.9
CONUS 30 36 2.4 0.4
Table 1 shows the information regarding the net-
work physical topologies with respect to the number
of nodes and links, average and variance of the node
degree. The variance node degree helps to understand
how regular the network is from the point of view
of the number of links at each node in the network
(Fenger et al., 2000). Higher variances correspond
to more irregular networks. When the variance node
degree is zero, it means that all nodes have the same
number of links (Fenger et al., 2000).
The parameters used to characterize the physical
topology, i.e. the average and variance node degree,
can also be used to characterize the logical topology.
Table 2 presents these parameters considering that a
full mesh logical topology is applied over the physi-
cal topologies. In this scenario, the average node de-
gree is N − 1. Furthermore, the variance node degree
is zero, because all nodes have the same number of
links. In table 2 the number of bidirectional paths for
a full mesh logical topology is also shown and is given
by
n(n−1)
2
.
Table 2: Real networks logical topology parameters.
Number of Average Variance
Network Paths node node
degree degree
COST239 55 10 0
NSFNET 91 13 0
UBN 276 23 0
CONUS 435 29 0
Also, the average and variance node degree pa-
rameters can be evaluated in the context of the path
graph G(W, P), as shown in Table 3. The parameter
p is also presented in Table 3. A high average value
means that on average, one or more links of every path
are being used by several different paths. From Table
3 it can be observed that the variance node degree is at
least one order of magnitude higher than the average
node degree. This means that there are some links
belonging to a path (i.e. vertex) that are being used
by many other different paths, and also that there are
some links belonging to a path that are not being used,
or are slightly used by other paths. So, networks with
high path variances need a high number of colors, as
we will discuss in subsection 4.3.
Table 3: Real networks path topology parameters.
Para- Average Variance
Network meter Node Node
p Degree Degree
COST239 0.101 5.6 14
NSFNET 0.25 22.5 121
UBN 0.2250 61.9 1.2840 × 10
3
CONUS 0.379 164.6 4.3696 × 10
3
4.3 Performance Analysis
In this subsection, the performance of Greedy and
Tabu Search algorithms are assessed and compared
when applied to the real networks described in sub-
section 4.2.
Table 4 presents the number of colors and the
corresponding simulation times for the networks
COST239, NSFNET, UBN and CONUS with 30
nodes, considering a full mesh logical topology, ob-
tained with the Greedy and Tabu Search algorithms.
From the results presented in Table 4, regarding
the simulation time, it is observed that the Greedy al-
gorithm is 4 times faster than the Tabu Search for the
COST239 network and almost 10 times faster than
the Tabu Search for the CONUS network. Thus, the
Exploring the Tabu Search Algorithm as a Graph Coloring Technique for Wavelength Assignment in Optical Networks
65
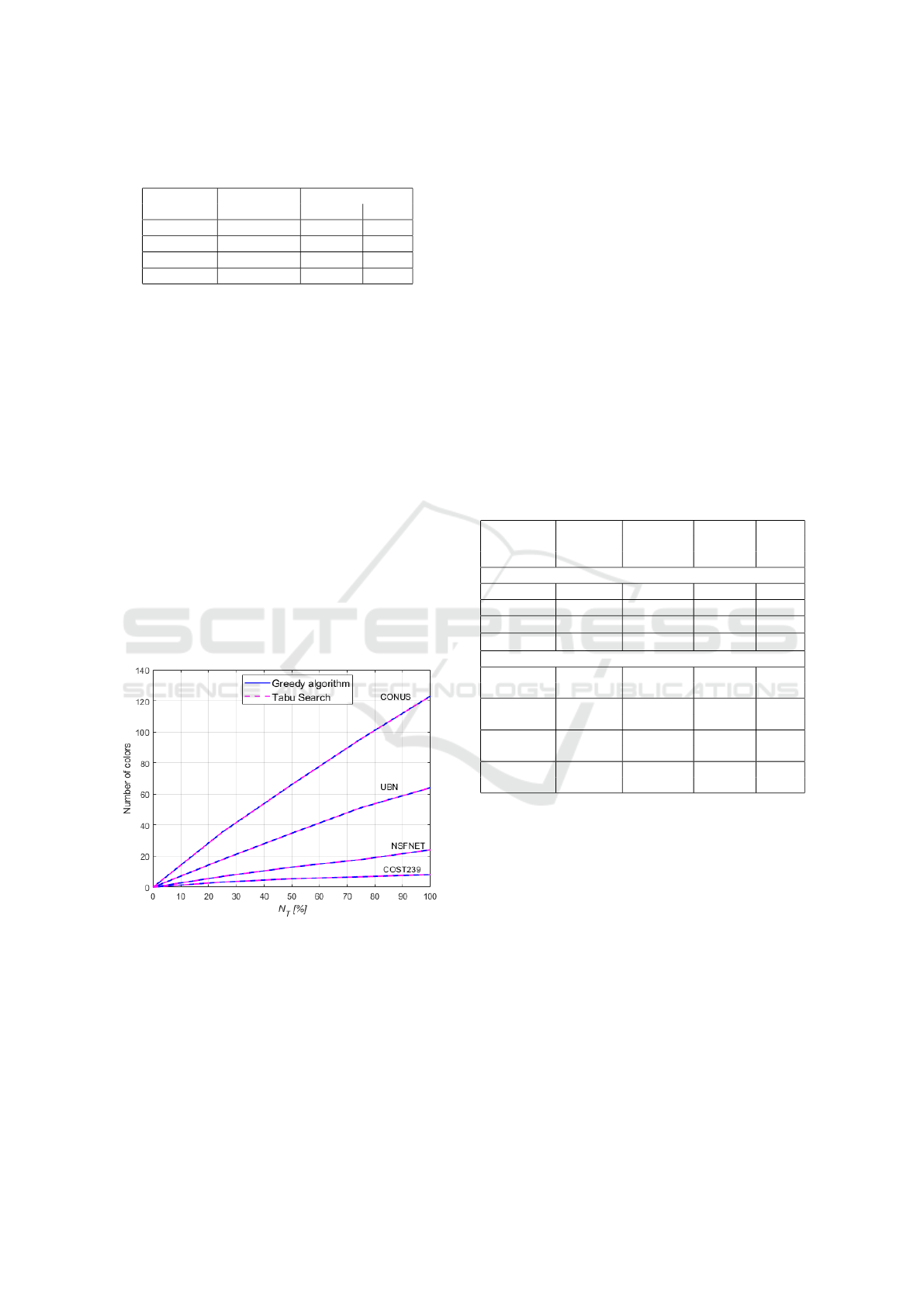
Table 4: Number of colors and simulation time obtained by
Greedy and Tabu Search for some networks.
Network Number of Time (sec)
colors Greedy Tabu
COST239 8 0.002 0.008
NSFNET 24 0.009 0.015
UBN 64 0.014 0096
CONUS 123 0.040 0.373
Greedy algorithm leads to a faster simulation time
than the one obtained with the Tabu Search.
Also, as observed in Table 4, the number of colors
obtained with the Greedy and Tabu Search algorithms
for the networks considered is the same. However, in
section 3, considering random graphs, we have seen
that the Tabu Search predicts a lower number of col-
ors than the Greedy algorithm. In order to understand
this apparently contradicting behavior, in the follow-
ing, we are going to study the influence of the traffic
pattern in the number of colors obtained by the two
algorithms. Therefore, we are going to change the
traffic matrix in order to obtain various logical topolo-
gies different from the full mesh topology considered
for the networks presented in Table 4. First, we de-
fine a metric called the percentage of network traffic,
denoted as N
T
. This metric ranges from 0 (no net-
work traffic) to 100% (full mesh topology) and aims
to quantify the change of network traffic in a traffic
matrix for different networks.
Figure 10: Number of colors provided by the Greedy and
Tabu Search algorithms for some networks as function of
N
T
.
Figure 10 shows the number of colors as a func-
tion of the percentage of network traffic N
T
, for the
networks considered in Table 4, using the Greedy and
Tabu Search algorithms. From Figure 10, it can be
observed that, when N
T
= 0, as there is no traffic in
the network, no colors are assigned. When N
T
> 0,
the two algorithms give exactly the same number of
colors. Thus, it can be concluded that the change of
the traffic matrix (i.e. the logical topology) does not
produce any differences on the number of colors pre-
dicted by both algorithms. The reason for this be-
havior is going to be detailed next, but relies on the
fact that the variance node degree of the path matrix
is considerably greater than the corresponding aver-
age value.
Next, we are going to investigate the impact of the
average and variance node degrees of the path graph
G(W, P) in the performance of the Greedy and Tabu
Search algorithms, in order to try to explain why the
two algorithms give the same number of colors when
real networks are considered, independently of the
network traffic, and different number of colors with
random graphs.
Table 5: Average and variance node degree and number of
colors given by the Greedy with descending order and Tabu
Search algorithms for real networks and for random path
graphs with the same characteristics, n and p, of the real
networks.
Average Variance Greedy Tabu
Network node node des- Sear
degree degree cend ch
Real networks
COST239 5.6 14 8 8
NSFNET 22.5 121 24 24
UBN 61.9 1.3 × 10
3
64 64
CONUS 164.6 4.4 × 10
3
123 123
Random path graphs with uniform distribution
n = 55
5.88 5.88 4.6 5
p = 0.1
n = 91
22.5 14 11 8
p = 0.25
n = 276
61.9 51.9 21 15
p = 0.225
n = 435
170.2 164.5 47 34
p = 0.392
In Table 5, the average and the variance node de-
grees of the path graph, G(W, P) of the COST239
(n = 55 and p = 0.101), NSFNET (n = 91 and p =
0.25), UBN (n = 276 and p = 0.225) and CONUS
with 30 nodes (n = 435 and p = 0.392) networks
and the respective number of colors predicted by the
Greedy and Tabu Search algorithms are presented for
a full mesh logical topology, i.e. N
T
= 100%. The
same network parameters are also presented for ran-
dom graphs (where the corresponding path matrix is
generated with a uniform distribution), with the same
number of paths and parameter p of the referred net-
works.
As can be observed in Table 5, the average node
degree of the path graph in real networks and random
graphs is very similar as it depends on the number of
paths and on the parameter p that is the same for the
real and random networks. However, it can be no-
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
66
ticed that in random graphs, the variance node degree
has a similar magnitude relatively to the average node
degree, while, in real networks, the variance node de-
gree is at least one order of magnitude higher than
the average node degree. The lower variance found
in random graphs is due to the uniform distribution
of 1’s in the path matrix, that defines the graph path
G(W, P) (e.g. for p = 0.1 it means that each line of
the matrix has 10% of ones and 90% of zeros on av-
erage), while the higher variances found in real net-
works are due to the non-uniform distribution of 1’s
in the path matrix. Furthermore, in random graphs,
for lower variance node degrees, the difference in col-
ors between Greedy and Tabu Search is notorious,
whereas in real networks both algorithms produce the
same number of colors. For example, for n = 435 and
p = 0.392, in Table 5, the variance node degree for
the CONUS with 30 nodes network is 4370, whereas
for the respective random graph, the variance has a
much lower value, 164.5. So, this finding can jus-
tify the fact that the number of colors computed by
the Greedy and Tabu Search algorithms when random
graphs are used is different, while the same number of
colors is obtained when real networks are considered.
To further confirm this finding we are going to
study the evolution of the number of colors as a func-
tion of the variance node degree of the path graph,
G(W, P), for both Greedy and Tabu Search algo-
rithms.
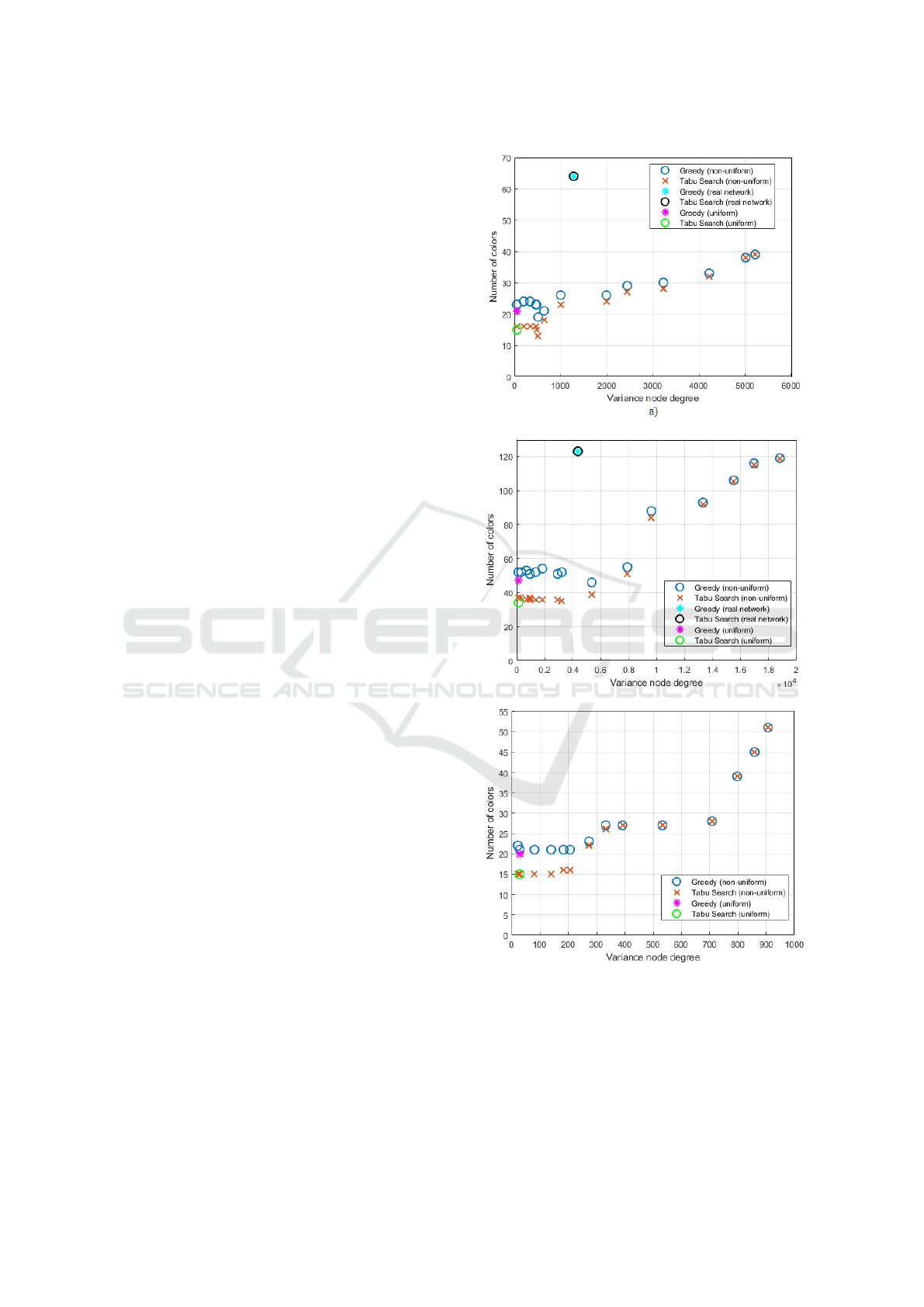
Figure 11 shows the number of colors obtained
with the Greedy and Tabu Search algorithms as a
function of the variance node degree for random ma-
trices using uniform and non-uniform distributions
with the same number of paths n and parameter p of
the real networks: a) UBN and b) CONUS with 30
nodes. In Figure 11 c), the case of the random graph
with n = 100 and p = 0.5 is also studied considering
uniform and non-uniform distributions. In Figures 11
a) and b), we also represent the number of colors cor-
responding to the real cases of UBN and CONUS with
30 nodes network, respectively.
As can be seen in Figure 11, for higher vari-
ance node degrees, the number of colors given by
Greedy and Tabu Search algorithms tends to con-
verge, whereas for lower variances the number of col-
ors produced by these algorithms is different, with
Tabu Search algorithm presenting a lower number of
colors. This behavior is observed for all the three net-
works studied. For example, in Figure 11 c), for a
low variance value of around 27, the Greedy algo-
rithm produces, respectively, 22 and 20 colors, with a
non-uniform and a uniform distribution, whereas the
Tabu Search produces 15 colors for both distributions.
Likewise, in Figure 11 c), for a high variance value of
Figure 11: Number of colors obtained with the Greedy and
Tabu Search algorithms for random graphs as a function of
the variance node degree for a) n = 276 and p = 0.225, b)
n = 435 and p = 0.392 and c) n = 100 and p = 0.5.
900, both algorithms produce around 52 colors with a
non-uniform distribution. In Figures 11 a) and b), the
number of colors obtained in the UBN and CONUS
with 30 nodes networks is also represented for both
Exploring the Tabu Search Algorithm as a Graph Coloring Technique for Wavelength Assignment in Optical Networks
67

algorithms. It can be observed that in these scenarios,
there are no difference between the number of colors
given by the Tabu Search and the Greedy algorithms,
which can be explained by the higher variances val-
ues relatively to its average values and also due to the
higher number of colors used. In the limit, when the
maximum number of colors is used both algorithms
must return the same number of colors.
5 CONCLUSIONS
In this work, the performance of a metaheuristic al-
gorithm, the Tabu Search algorithm, has been studied
as a graph coloring technique for WA in optical net-
works, as well as in randomly generated path graphs
and his performance has been compared with the one
of the Greedy algorithm.
The Tabu Search algorithm, when the path graph
is obtained randomly (with a uniform distribution) has
been shown to have a superior performance to the
Greedy algorithm. In particular, when n = 1000 and
p = 0.5, the Tabu Search algorithm returns only 89
colors, whereas the Greedy algorithm gives 124 col-
ors, which represents a decrease of 35 colors. How-
ever, when real networks are considered, both Greedy
and Tabu Search algorithms give the same number of
colors. We have found that as the variance node de-
gree of the path graph, G(W, P), increases the Greedy
and Tabu Search algorithms tend to return the same
number of colors, whereas when the variance gets
lower this number of colors becomes different. So,
we can conclude that in real network scenarios the
simplest and faster Greedy algorithm sorted with de-
scending order should be used, instead of the more
complex and slower Tabu Search algorithm, since real
networks have typically high variance node degree
values which causes the Tabu Search and Greedy al-
gorithms to have a similar performance.
ACKNOWLEDGEMENTS
This work was supported under the project of Instituto
de Telecomunicac
˜
oes UIDB/50008/2020.
REFERENCES
Biernacka, E., Domzal, J., and W
´
ojcik, R. (2017). In-
vestigation of dynamic routing and spectrum allo-
cation methods in elastic optical networks. Inter-
national Journal of Electronics and Telecommunica-
tions, 63:85–92.
Duarte, I. (2020). Exploring graph coloring heuristics for
optical networks planning. Master’s thesis, ISCTE -
Instituto Universit
´
ario de Lisboa.
Duarte, I., Cancela, L., and Rebola, J. (2021). Graph color-
ing heuristics for optical networks planning. In Tele-
coms Conference (ConfTELE), pages 1–6.
Dzongang, C., Galinier, P., and Pierre, S. (2005). A tabu
search heuristic for the routing and wavelength assign-
ment problem in optical networks. IEEE Communica-
tions Letters, 9(5):426–428.
Fenger, C., Limal, E., and Gliese, U. (2000). Statistical
study of the influence of topology on wavelength us-
age in WDM networks. In Optical Fiber Communi-
cation Conference, pages 171–173. Optical Society of
America.
Go
´
scie
´
n, R., Klinkowski, M., and Walkowiak, K. (2014). A
tabu search algorithm for routing and spectrum alloca-
tion in elastic optical networks. In 16th International
Conference on Transparent Optical Networks (ICTON
2014).
Hertz, A. and Werra, D. (1987). Using tabu search tech-
niques for graph coloring. Computing, 39:345–351.
LaQuey, T. (1990). NSFNET. In The User’s Directory of
Computer Networks, pages 247–250, Boston. Digital
Press.
Lewis, R. (2016). A Guide to Graph Coloring: Algorithm
and Applications. Springer, Switzerland.
Monarch Network Architects (1999). CONUS WDM net-
work topology. http://monarchna.com/topology.html.
Niksirat, M., Hashemi, S. M., and Ghatee, M. (2016).
Branch-and-price algorithm for fuzzy integer pro-
gramming problems with block angular structure.
Fuzzy Sets and Systems, 296:70–96.
Pi
´
oro, M. and Medhi, D. (2004). Routing, Flow, and Ca-
pacity Design in Communication and Computer Net-
works. MORGAN KAUFMANN PUBLISHERS.
Simmons, J. (2014). Optical Network Design and Planning.
Springer, New York, USA, 2nd edition.
Wang, S. (2004). A tabu search heuristic for routing in
WDM networks. Master’s thesis, University of Wind-
sor.
Winzer, P. et al. (2018). Fiber-optic transmission and net-
working: the previous 20 and the next 20 years. Optics
Express, 26(18):24190–24239.
Zangy, H., Juez, J., and Mukherjeey, B. (2000). A review
of routing and wavelength assignment approaches for
wavelength-routed optical WDM networks. Optical
Networks Magazine, 1:47–60.
PHOTOPTICS 2022 - 10th International Conference on Photonics, Optics and Laser Technology
68
