
Variational Temporal Optical Flow for Multi-exposure Video
Onofre Martorell
a
and Antoni Buades
1 b
Institute of Applied Computing and Community Code (IAC3) and with the Dept.of Mathematics and Computer Science,
Universitat de les Illes Balears, Cra. de Valldemossa km. 7.5, E-07122 Palma, Spain
Keywords:
Optical Flow, Motion Estimation, Variational Methods, Multi-exposure Videos.
Abstract:
High Dynamic Range (HDR) reconstruction for multi-exposure video sequences is a very challenging task.
One of its main steps is registration of input frames. We propose a novel variational model for optical flow
estimation for multi-exposure video sequences. We introduce data terms for consecutive and non consecutive
frames, the latter term comparing frames with the same exposure. We also compute forward and backward flow
terms for the current frame, naturally introducing temporal regularization. We present a particular formulation
with sequences with two exposures, that can be extended to larger number of exposures. We compare the
proposed method with state of the art variational models.
1 INTRODUCTION
Multi-exposure fusion (MEF) and High Dynamic
Range (HDR) imaging are two techniques to combine
several images of the same scene taken with differ-
ent exposure times into a single image. Conventional
cameras are not able to capture in one shot the whole
large range of natural light present in the scene. Al-
though both families of methods seek the same goal,
the main procedure used is different. On one hand,
in HDR, the irradiance values of each image need to
be obtained. To do that, the camera response function
(CRF) has to be estimated, generally using the method
proposed by Devebec and Malik (Debevec and Ma-
lik, 2008). After the fusion, the result obtained by a
HDR method has to be converted into a standard 8
bit image, for visualization in common displays. This
process is known as tone-mapping (Reinhard et al.,
2005). On the contrary, MEF avoids the CRF esti-
mation and the tone-mapping by directly fusing the
images in the standard 8bit domain.
There exists a wide literature on MEF and HDR.
The most well-known method in MEF is the one pro-
posed by Mertens et al. (Mertens et al., 2009) and
in HDR, a widely used method is the one proposed
by Devebec and Malik (Debevec and Malik, 2008).
In order to apply both methods, the image sequence
needs to be static, that is, the objects in the scene do
not move and the camera is fixed. This is not the case
a
https://orcid.org/0000-0002-9071-778X
b
https://orcid.org/0000-0001-9832-3358
for many sequences, and the application of such meth-
ods introduce ghosting effects. To avoid these arte-
facts, methods might be adapted to non-static image
sequences (Martorell et al., 2019), (Ma et al., 2017),
(Hu et al., 2013), (Khan et al., 2006).
A natural extension of MEF and HDR imaging
algorithms are MEF and HDR video, respectively.
There is a lack of specialized hardware to acquire
pleasant videos with large range of colors directly or it
is too expensive to be used in daily-used devices such
as mobile phones because they require complex sen-
sors or optical systems (Tocci et al., 2011)(Zhao et al.,
2015). The best way to overcome this problem is by
capturing videos where each frame is taken with alter-
nating exposure times (generally 2 or 3) and produce
a video with a high range of colors by processing the
frames offline using MEF or HDR techniques. Fig-
ure 1 shows some examples of muti-exposure video
sequences.
The transition from MEF or HDR imaging to the
corresponding video method is not straightforward.
First, only two or three exposures are available, mean-
ing that for some regions we will only dispose of un-
der or over exposed images. This is not the case for
still image combination where five or more exposures
might be available. Second, when a single image
needs to be synthesized, the image with the best expo-
sure of the initial set can be chosen as reference and
the rest be registered according to this reference one.
However, in HDR and MEF video, methods need to
be applied taking as reference each one of the frames,
666
Martorell, O. and Buades, A.
Variational Temporal Optical Flow for Multi-exposure Video.
DOI: 10.5220/0010908300003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
666-673
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

which are generally darker or brighter than a middle-
exposed image.
Registration is an important step in video fusion
and the overall result depends critically on it. Most
HDR video methods try to estimate the optical flow
between the central frame and the neighbouring ones,
which were taken with a different exposure time. In
two exposure video sequences, this means the flow
with the previous and posterior frames is computed.
Methods additionally compute the flow between the
previous and posterior frames which have the same
exposure. Then methods select among computed flow
locally depending if the regions is or not saturated.
We propose a variational method for optical flow
with two alternating exposures. We combine in a
single functional the forward and backward flow and
take advantage that the previous and posterior frames
have the same exposure. All computed flows are de-
fined taking the central image grid as reference, al-
lowing to naturally include temporal regularization.
This paper is organized as follows. In Section 2
we present the existing literature on registration for
multi-exposure video sequences and variational op-
tical flow with temporal smoothness constraints. In
Section 3 we propose a new optical flow variational
model for triplets of images in a video. In Section 4
we compare the obtained results with existing optical
flow methods. Finally, in Section 5 we draw some
conclusions and future work.
2 RELATED WORK
2.1 HDR Video
It is not surprising that no methods are proposed for
dealing with multi-exposure sequences directly in the
input 8 bit domain. MEF methods perform worse than
HDR when few exposures are available, which is the
case of video. However, there are many works which
deal with HDR for video sequences. We will make a
review of those methods, focusing on the techniques
used to register the input images. All those meth-
ods use an estimation of the CRF to transform the
input images from an LDR domain to an HDR do-
main. These radiance frames are then normalized by
dividing by its exposition time. In this way, different
frames have the same irradiance value at correspond-
ing pixels.
The common step for reducing ghosting artifacts
is registering the frames prior to their combination.
The classical method for HDR video registration is
the use of optical flow, e.g Lukas-Kanade, used by
Kang et al. (Kang et al., 2003), block matching, used
by Mangiat et al. (Mangiat and Gibson, 2010) or the
method proposed by Liu (Liu et al., 2009), used by
Kalantari et al. (Kalantari et al., 2013). The more re-
cent Li et al. (Li et al., 2016) first separate foreground
and background before registering the frames.
Musil et al. (Musil et al., 2020) present a fast
ghost-free HDR acquisition algorithm for static cam-
eras. For each frame, they compute a certainty map
based on the difference of pixel values with its neigh-
boring frames in the radiance domain. This permits
the removal of moving objects and the fusion to ob-
tain the final HDR image.
Van Vo and Lee (Van Vo and Lee, 2020) is the
only method that takes into account the temporal in-
formation: they divide the motion estimation step into
two phases: on one hand, they perform optical flow
estimation of well-exposed areas in the descriptor do-
main. On the other hand, they perform a superpixel-
based motion estimation on poorly exposed areas by
computing the optical flow field from the backward
frame to the forward frame. The optical flow from
central to forward and backward frames is half of the
computed flow.
There exist learning-based methods for HDR
video synthesis (Kalantari and Ramamoorthi, 2019)
(Chen et al., 2021). In both cases, they compute the
optical flow of the input frames by training a CNN
coarse-to-fine architecure based on the ones by Ran-
jan and Black (Ranjan and Black, 2017) and Wang et
al. (Wang et al., 2017). Training is performed into
an end-to-end way, meaning that only the error of the
final HDR sequence is used for defining the loss.
2.2 Variational Optical Flow with
Temporal Regularization
The first variational formulation of the optical flow
problem was presented by Horn and Schunk (Horn
and Schunck, 1981). They proposed to find the op-
tical flow field w = (u, v) between a pair of images,
I
0
and I
1
, by minimizing an energy functional formed
by two different terms: the data and the smoothness
terms. The first one imposes the brightness constancy
constraint, that is, the gray values of corresponding
pixels are the same; and the second one penalizes the
high variations of the optical flow field. This second
term was written as
Z
Ω
(||∇u(x)||
2
+ ||∇v(x)||
2
)dx, (1)
with x = (x, y) being a two-dimensional point.
Weickert and Schn
¨
orr (Weickert and Schn
¨
orr,
2001) proposed the first method introducing a tem-
poral derivative in the energy functional. Instead of
computing the optical flow between a pair of frames,
Variational Temporal Optical Flow for Multi-exposure Video
667

bridge2hallway2
hands
ninja
Figure 1: Frames of multi-exposure video sequences with 2 exposure times used for comparison. Sequences obtained from
Kalantari et al. (Kalantari et al., 2013) and Li et al. (Li et al., 2016) datasets.
they considered a video sequence {I
t
| t = 0, . . . , N}.
They used the data term proposed in (Horn and
Schunck, 1981) but used a 3D gradient operator for
the smoothness term:
Z
Ω×[0,N]
Ψ(||∇
3
u(x)||+ ||∇
3
v(x)||)dx, (2)
with x = (x, y, t) being a three-dimensional point,
where the third coordinate corresponds to the time.
Brox et al. (Brox et al., 2004) adopted the same reg-
ularity term as Weickert and Schn
¨
orr but introduced a
new data term based on the correspondence of gradi-
ents. In both cases, this regularization operator may
fail in presence of large and complex motions.
Salgado et al. (Salgado and S
´
anchez, 2007) pro-
pose to separate the temporal regularization constraint
from the spatial one in (2). They used the same spatial
regularization term as in (1) and proposed the tempo-
ral term
Z
Ω
N−1
∑
t=0
Ψ(||w
t
(x) −w
t+1
(x + w
t
(x))||
2
)dx+
Z
Ω
N
∑
t=1
Ψ(||w
t
(x) −w
t−1
(x + w
∗
t−1
(x))||
2
)dx,
where w
∗
i−1
(x) is the backward flow. This new tem-
poral term is nonlinear but permits to better deal with
large displacements. Moreover, for small displace-
ments, this term can be seen as the discretization of
the temporal derivative presented previously. Years
later, Sanchez et al. (S
´
anchez et al., 2013) improved
the method by introducing a second order temporal
smoothness constraint at the PDE level:
N−1
∑
t=1
Ψ
0
(||w
t−1
(x + w
∗
t−1
(x)) −w
t+1
(x + w
t
(x))||
2
)·
(w
t−1
(x + w
∗
t−1
x)) −2w
t
+ w
t+1
(x + w
t
x))).
(3)
Volz et al. (Volz et al., 2011) proposed a
novel parametrization of optical flow fields to encour-
age temporal regularization along motion trajectories.
With this new parametrization, the nonlinearity form
Sanchez et al. disappears and the minimization be-
comes simpler. As Sanchez et al., they also used
a second order regularization, in this case added di-
rectly in the energy functional:
Z
Ω
N−1
∑
t=0
Ψ(||w
t+1
(x) −w
t
(x)||
2
)dx+
Z
Ω
N−1
∑
t=1
Ψ(||w
t+1
(x) −2w
t
(x) + w
t−1
(x)||
2
)dx.
(4)
3 OPTICAL FLOW WITH
TEMPORAL CONSTRAINTS
Let {I
t
|t = 0, . . . , N} be a sequence of images, where
images are taken with 2 different alternating exposure
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
668

times. Figure 1 shows some examples of frames of
the videos used in the experimentation section. At
each frame position we dispose of a single exposure.
Hence, we need to compute optical flow between con-
secutive frames of different exposure.
Let I
t
be the reference frame and I
t+1
and I
t−1
the previous and posterior frames, respectively. We
present the method for this triplet of images, and it is
repeated for each t ∈ {1, . . . , N −1}.
It must be noted that most variational optical flow
models rely on the brightness constancy assumption,
which states that two corresponding pixels have the
same color. However, this assumption is not satis-
fied with multi-exposure images. To overcome this
issue, we apply photometric calibration to the pairs
(I
t
, I
t+1
) and (I
t
, I
t−1
) separately by using the method
proposed by Martorell et al. (Martorell et al., 2019).
As most algorithms, we choose to modify the color of
the darker images of the sequence, to look alike the
neighbouring brighter ones. Brighter images might
have large saturated areas while this is not the case of
darker ones.
The used method for photometric calibration re-
quires that the input images are roughly registered.
Hence, we first globally register the neighbour frames
with respect to the reference one. We use a global
affine transformation. This is estimated using SIFT
matches (Lowe, 1999) and RANSAC strategy (Fis-
chler and Bolles, 1981). After this initial registration
we apply the photometric calibration from Martorell
et al. (Martorell et al., 2019).
Once the images are photometrically calibrated
and globally registered, we can estimate the optical
flow between neighbouring frames using a variational
model.
3.1 Proposed Variational Model
Let I
t−1
, I
t
and I
t+1
be 3 consecutive frames from a
multi-exposure video sequence and let w
F
(x) be the
optical flow field from I
t
(x) to I
t+1
(x) and w
B
(x) the
optical flow field from I
t
(x) to I
t−1
(x). We want to
jointly estimate the optical flow fields from the cen-
tral frame to the other two by taking into account the
video nature of the input data. Apart from the well-
known data and spatial smoothness terms, we want to
impose two new aspects in the minimization. On one
hand, we want that the motion trajectories are smooth
along the video sequence. On the other hand, we want
to match pixels from I
t−1
to I
t+1
.
Most methods presented in Section 2.2
parametrize w
B
(x) as the optical flow from I
t−1
(x)
to I
t
(x), but this forces them to minimize the energy
functional twice, in order to warp both neighbour
frames. In our case, we follow the parametriza-
tion from Volz et al. (Volz et al., 2011), which
parametrizes both optical flow fields with regard to
the central frame and allows to warp both neighbour
frames by minimizing just one energy functional.
Most methods for HDR video compute separately
the registration fields w
F
(x) and w
B
(x). However,
these estimations are prone to fail at saturated areas.
To solve this, Van Vo and Lee (Van Vo and Lee, 2020)
also compute the optical flow from I
t−1
(x) to I
t+1
(x)
and combine it heuristically with w
F
(x) and w
B
(x).
In contrast, the proposed method introduces the com-
parison of non-consecutive frames in the energy func-
tional to address this problem.
With all that, we propose to minimize the fol-
lowing energy functional to estimate the optical flow
fields:
E(w
B
, w
F
) = α
S (w
B
) + S (w
F
)
+ δT (w
B
, w
F
)+
β
γ
F
D
F
(w
F
) + γ
B
D
B
(w
B
) + λJ (w
B
, w
F
)
(5)
where variables β, γ
F
, γ
B
, λ, α and δ are the
weights that measure the trade-off of each term and
D
F
(w
F
) =
Z
Ω
Ψ
ˆ
I
t+1,t
(x + w
F
) −
ˆ
I
t,t+1
(x)
2
dx
(6)
D
B
(w
B
) =
Z
Ω
Ψ
ˆ
I
t−1,t
(x −w
B
) −
ˆ
I
t,t−1
(x)
2
dx
(7)
J (w
B
, w
F
) =
Z
Ω
Ψ
(I
t+1
(x + w
F
) −I
t−1
(x −w
B
))
2
dx
(8)
S (w) =
Z
Ω
Ψ
||∇w
F
||
2
+ Ψ
||∇w
B
||
2
dx (9)
T (w
B
, w
F
) =
Z
Ω
Ψ
||w
F
−w
B
||
2
dx (10)
where
ˆ
I
k j
and
ˆ
I
jk
are pairs of images I
k
and I
j
photometrically calibrated according to the criteria
presented at the beginning of the section. Finally,
Ψ(s
2
) =
√
s
2
+ ε
2
with ε = 0.00001 is a robust convex
function.
The proposed energy functional contains several
terms which serve for different purposes, let’s analyse
in detail all the terms of the energy functional:
(i) D
F
(w
F
): data term to match pixels from
ˆ
I
t,t+1
to
ˆ
I
t+1,t
through optical flow field w
F
.
(ii) D
B
(w
B
): data term to match pixels from
ˆ
I
t,t−1
to
ˆ
I
t−1,t
through optical flow field w
B
. Since w
B
Variational Temporal Optical Flow for Multi-exposure Video
669

is computed with regard to the central frame, we
need to substract the optical flow to the coordi-
nates to get the right registration.
(iii) J (w
B
, w
F
): data term to match pixels from I
t+1
and I
t−1
through optical flow fields w
B
t
and w
F
t
.
Since both optical flow fields have the same ref-
erence, we can use this term easily, without in-
troducing nonlinearities, which could make the
minimization more difficult.
(iv) S (w): spatial smoothness term for optical flow.
(v) T (w
B
, w
F
): first order temporal smoothness
term to regularize motion trajectories. Since
both optical flow fields have the same reference,
we just need to substract them, not as in Sanchez
et al. (S
´
anchez et al., 2013), where they needed
to compose optical flow fields to write this term.
3.2 Minimization
The minimization of the energy functional (5) at each
frame I
t
is done by finding the corresponding Euler-
Lagrange equation and solving the obtained linear
system of equations with a successive over-relaxation
(SOR) scheme. The minimization is embedded in
a pyramidal structure to better deal with large dis-
placements: given a number of scales N
scales
, and
a downsampling factor ν, the input images at scale
s = 0, . . . , N
scales
−1 are the input images at scale s−1
convolved with a Gaussian kernel and downsampled
by a factor ν. We start estimating the optical flow
at scale s = N
scales
−1, then we upsample the output
flow and we repeat the minimization at scale s −1 by
using as initialization the upsampled optical flow.
4 RESULTS
In this section we compare the proposed fusion al-
gorithm with other variational optical flow methods.
We compare our method against Brox et al. (Brox
et al., 2004) with and without temporal smoothness
constraints. In both cases, we use the implementa-
tion available at ipol.im (S
´
anchez P
´
erez et al., 2013).
We modified the code of the method with temporal
constraints to be able to deal with pairs of photome-
trically calibrated images, as in the proposed model.
For simplicity, we name the methods brox spatial and
brox temporal, respectively. In both methods we need
to compute two flows: in brox spatial we need to
compute separately the flow from I
t
to I
t+1
and from I
t
to I
t−1
. On the other hand, brox temporal model gives
always the optical flow from one frame to the next
Table 1: Mean error of 4 frames from each sequence. In
bold, the method with lowest error for each sequence.
Brox et al.
Brox et al.
temporal
Ours
hands 10.67 13.68 11.99
ninja 23.30 32.10 20.88
bridge 15.25 18.95 13.93
hallway 10.71 12.59 10.71
parkinglot 24.30 31.67 22.94
Average 14.04 18.17 13.41
one. Hence, we need to apply the model to the se-
quence {I
t−1
, I
t
, I
t+1
} and to {I
t+1
, I
t
, I
t−1
} to get w
F
and w
B
.
We evaluate our algorithm by using several multi-
exposure video sequences available online: Kalantari
et al. (Kalantari et al., 2013) have available online
1
a dataset of 7 sequences, 4 of them with 2 exposures.
We use sequences hands and ninja from this dataset.
Moreover, Li et al. (Li et al., 2016) have available
online
2
a dataset with 4 video sequences with 2 ex-
posure times. From this dataset, we use sequences
bridge, hallway and parkinglot.
Our results were computed using the same param-
eters for all tests. We set weights β, α and δ to 1,
13 and 0.5, respectively. The values of γ
F
, γ
B
and λ
have been set taking into account the kind of input
data used: in multi-exposure videos sequences with
2 exposure times, frames I
t−1
and I
t+1
have the same
exposure times, hence, their comparison will be more
reliable compared to the ones of consecutive frames,
which have different exposure times. Because of that,
we have decided to give more weight to the term
J (w
B
, w
F
) by setting λ = 1 and γ
F
= γ
B
= 0.5.
We first evaluate our algorithm quantitatively in
4 images of different sequences. We compute all
needed optical flow fields at each frame, we then com-
pute the registration error for each frame and we fi-
nally do the mean to get a measure of the error on
each sequence. For each frame I
t
, we compute the
error as
∑
x∈
˜
Ω
ˆ
I
t+1,t
(x + w
F
) −
ˆ
I
t,t+1
(x)
2
+
∑
x∈
˜
Ω
ˆ
I
t−1,t
(x −w
B
) −
ˆ
I
t,t−1
(x)
2
,
(11)
where
˜
Ω is the discrete domain of the image.
Table 1 shows the results on 5 multi-exposure se-
quences, where the method with lowest error is high-
lighted in bold. As we can see, our methods obtains
the lowest error in 4 sequences. In hands sequence we
1
https://web.ece.ucsb.edu/∼psen/PaperPages/HDRVideo
2
http://signal.ee.psu.edu/research/MAPHDR.html
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
670

brox spatial brox temporal Ours
Figure 2: Warped images for two consecutive frames of ninja sequence.
get the second best error, and in hallway sequence we
get the same error as brox spatial.
We also evaluate our results qualitatively. Figure
2 shows a detail of I
t−1
(x − w
B
) for two consecu-
tive frames of ninja sequence. As it can be seen, our
method performs better than the compared methods.
We also evaluate our optical flow method by find-
ing pixels with inaccurate displacement: we perform
a left-right consistency on the forward flow as
LR(x) =max
||w
t
F
(x) + w
t+1
B
(x + w
t
F
)||, (12)
||w
t
B
(x) + w
t−1
F
(x + w
t
B
(x))||
(13)
M
lr
F
(x) =
1 if LR(x) < 2
0 otherwise
. (14)
and the left-right consistency check on the backward
flow M
lr
B
is computed analogously. Since we have two
masks, we combine them to get a final mask as
M
lr
(x) = M
lr
F
(x) ·M
lr
B
(x). (15)
We apply the HDR algorithm from Khan et al.
(Khan et al., 2006) to the triplet of aligned images
to get a fusion with a large range of colors.
Figure 3 shows the result of fusing the three reg-
istered images using the HDR algorithm from Khan
et al. (Khan et al., 2006) as well as the left-right
consistency mask superimposed in two consecutive
frames of ninja sequence. As it can be seen, our
method has a better left-right consistency and align-
ment. Brox spatial has more errors at registration: the
stairs in the background at the second row are not per-
fectly aligned and the man has registration errors be-
tween the legs. Moreover, brox temporal has a small
misalignment on the right side of the second image,
making it look blurry. Finally, our method has less
errors due to left-right consistency.
5 CONCLUSIONS
We have presented a new variational model for opti-
cal flow estimation in multi-exposure sequences. We
use temporal constraints to take into account the video
nature of input images. We have applied photometric
calibration to obtain pairs of images with the same
color, in order to satisfy brightness constancy on the
optical flow model. Qualitative and quantitative per-
formance show that our method performs better than
other optical flow variational models.
In future work, we plan to adapt the proposed
method for multi-exposure video sequences with 3
exposure times. In this case, forward and backward
frames do not have the same exposure time, hence we
need to use more frames in order to add more data
Variational Temporal Optical Flow for Multi-exposure Video
671
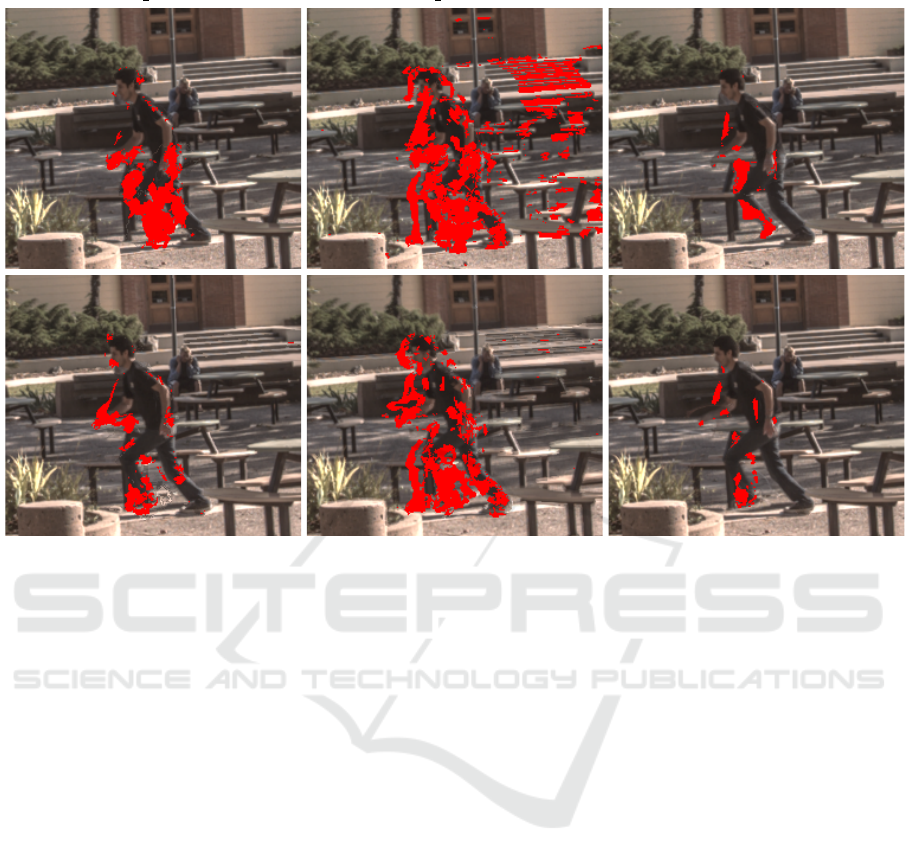
brox spatial brox temporal Ours
Figure 3: HDR fusion of registered images and left-right consistency mask superimposed in two consecutive frames of ninja
sequence.
terms like the one that matches pixels from forward
and backward frames.
Moreover, as seen in the results shown, our
method still has some registration errors, that should
be solved so as to get a good looking final fused im-
age. To do that, we plan to apply some processing
techniques to remove them.
ACKNOWLEDGEMENTS
The authors acknowledge the Ministerio de Ciencia,
Innovaci
´
on y Universidades (MCIU), the Agencia Es-
tatal de Investigaci
´
on (AEI) and the European Re-
gional Development Funds (ERDF) for its support to
the project TIN2017-85572-P.
REFERENCES
Brox, T., Bruhn, A., Papenberg, N., and Weickert, J. (2004).
High accuracy optical flow estimation based on a the-
ory for warping. In European conference on computer
vision, pages 25–36. Springer.
Chen, G., Chen, C., Guo, S., Liang, Z., Wong, K.-Y. K.,
and Zhang, L. (2021). Hdr video reconstruction: A
coarse-to-fine network and a real-world benchmark
dataset. In Proceedings of the IEEE/CVF Interna-
tional Conference on Computer Vision (ICCV), pages
2502–2511.
Debevec, P. E. and Malik, J. (2008). Recovering high dy-
namic range radiance maps from photographs. In
ACM SIGGRAPH 2008 classes, page 31. ACM.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: a paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Communications of the ACM, 24(6):381–395.
Horn, B. K. and Schunck, B. G. (1981). Determining optical
flow. Artificial intelligence, 17(1-3):185–203.
Hu, J., Gallo, O., Pulli, K., and Sun, X. (2013). Hdr
deghosting: How to deal with saturation? In Pro-
ceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 1163–1170.
Kalantari, N. K. and Ramamoorthi, R. (2019). Deep hdr
video from sequences with alternating exposures. In
Computer Graphics Forum, volume 38, pages 193–
205. Wiley Online Library.
Kalantari, N. K., Shechtman, E., Barnes, C., Darabi, S.,
Goldman, D. B., and Sen, P. (2013). Patch-based high
dynamic range video. ACM Trans. Graph., 32(6):202–
1.
Kang, S. B., Uyttendaele, M., Winder, S., and Szeliski, R.
(2003). High dynamic range video. In ACM Transac-
tions on Graphics (TOG), volume 22, pages 319–325.
ACM.
Khan, E. A., Akyuz, A. O., and Reinhard, E. (2006). Ghost
removal in high dynamic range images. In 2006 In-
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
672

ternational Conference on Image Processing, pages
2005–2008. IEEE.
Li, Y., Lee, C., and Monga, V. (2016). A maximum a pos-
teriori estimation framework for robust high dynamic
range video synthesis. IEEE Transactions on Image
Processing, 26(3):1143–1157.
Liu, C. et al. (2009). Beyond pixels: exploring new repre-
sentations and applications for motion analysis. PhD
thesis, Massachusetts Institute of Technology.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Proceedings of the seventh
IEEE international conference on computer vision,
volume 2, pages 1150–1157. Ieee.
Ma, K., Li, H., Yong, H., Wang, Z., Meng, D., and Zhang,
L. (2017). Robust multi-exposure image fusion: A
structural patch decomposition approach. IEEE Trans.
Image Processing, 26(5):2519–2532.
Mangiat, S. and Gibson, J. (2010). High dynamic range
video with ghost removal. In Applications of Digital
Image Processing XXXIII, volume 7798, page 779812.
International Society for Optics and Photonics.
Martorell, O., Sbert, C., and Buades, A. (2019). Ghosting-
free dct based multi-exposure image fusion. Signal
Processing: Image Communication, 78:409–425.
Mertens, T., Kautz, J., and Van Reeth, F. (2009). Expo-
sure Fusion: A Simple and Practical Alternative to
High Dynamic Range Photography. Computer Graph-
ics Forum.
Musil, M., Nosko, S., and Zemcik, P. (2020). De-ghosted
hdr video acquisition for embedded systems. Journal
of Real-Time Image Processing, pages 1–10.
Ranjan, A. and Black, M. J. (2017). Optical flow estimation
using a spatial pyramid network. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 4161–4170.
Reinhard, E., Ward, G., Pattanaik, S., and Debevec, P.
(2005). High Dynamic Range Imaging: Acquisi-
tion, Display, and Image-Based Lighting (The Mor-
gan Kaufmann Series in Computer Graphics). Mor-
gan Kaufmann Publishers Inc., San Francisco, CA,
USA.
Salgado, A. and S
´
anchez, J. (2007). Temporal constraints in
large optical flow estimation. In International Confer-
ence on Computer Aided Systems Theory, pages 709–
716. Springer.
S
´
anchez, J., Salgado de la Nuez, A. J., and Monz
´
on, N.
(2013). Optical flow estimation with consistent spatio-
temporal coherence models.
S
´
anchez P
´
erez, J., Monz
´
on L
´
opez, N., and Salgado de la
Nuez, A. (2013). Robust Optical Flow Estimation.
Image Processing On Line, 3:252–270.
Tocci, M. D., Kiser, C., Tocci, N., and Sen, P. (2011). A
versatile hdr video production system. ACM Transac-
tions on Graphics (TOG), 30(4):1–10.
Van Vo, T. and Lee, C. (2020). High dynamic range
video synthesis using superpixel-based illuminance-
invariant motion estimation. IEEE Access, 8:24576–
24587.
Volz, S., Bruhn, A., Valgaerts, L., and Zimmer, H. (2011).
Modeling temporal coherence for optical flow. In
2011 International Conference on Computer Vision,
pages 1116–1123. IEEE.
Wang, T.-C., Zhu, J.-Y., Kalantari, N. K., Efros, A. A., and
Ramamoorthi, R. (2017). Light field video capture
using a learning-based hybrid imaging system. ACM
Transactions on Graphics (TOG), 36(4):1–13.
Weickert, J. and Schn
¨
orr, C. (2001). Variational optic flow
computation with a spatio-temporal smoothness con-
straint. Journal of mathematical imaging and vision,
14(3):245–255.
Zhao, H., Shi, B., Fernandez-Cull, C., Yeung, S.-K., and
Raskar, R. (2015). Unbounded high dynamic range
photography using a modulo camera. In 2015 IEEE
International Conference on Computational Photog-
raphy (ICCP), pages 1–10. IEEE.
Variational Temporal Optical Flow for Multi-exposure Video
673
