
The Influence of Labeling Techniques in Classifying Human
Manipulation Movement of Different Speed
Sadique Adnan Siddiqui
1
, Lisa Gutzeit
1
and Frank Kirchner
1,2
1
Robotics Research Group, University of Bremen, Bremen, Germany
2
Robotics Inovation Center, DFKI, Bremen, Germany
Keywords:
Movement Recognition, Human Movement Analysis, k-Nearest Neighbor, Convolutional Neural Networks,
Extreme Gradient Boosting, Random Forest, Long Short-term Memory Networks, CNN-LSTM Network.
Abstract:
Human action recognition aims to understand and identify different human behaviors and designate appro-
priate labels for each movement’s action. In this work, we investigate the influence of labeling methods on
the classification of human movements on data recorded using a marker-based motion capture system. The
dataset is labeled using two different approaches, one based on video data of the movements, the other based
on the movement trajectories recorded using the motion capture system. The data was recorded from one
participant performing a stacking scenario comprising simple arm movements at three different speeds (slow,
normal, fast). Machine learning algorithms that include k-Nearest Neighbor, Random Forest, Extreme Gradi-
ent Boosting classifier, Convolutional Neural networks (CNN), Long Short-Term Memory networks (LSTM),
and a combination of CNN-LSTM networks are compared on their performance in recognition of these arm
movements. The models were trained on actions performed on slow and normal speed movements segments
and generalized on actions consisting of fast-paced human movement. It was observed that all the models
trained on normal-paced data labeled using trajectories have almost 20% improvement in accuracy on test
data in comparison to the models trained on data labeled using videos of the performed experiments.
1 INTRODUCTION
Recognition of human actions is an active research
area utilizing both vision and non-vision based
modalities. Machine Learning and Deep Learning al-
gorithms have shown promising results in the identifi-
cation and understanding of human behaviors, which
is important to improve the collaboration between hu-
mans and robots in several applications. The only ma-
jor concern with these supervised learning methods
is that the effectiveness of these methods desires an
ample amount of detailed labeled training data. De-
spite the need for a large amount of data for training
and human supervision for labeling these data, mak-
ing use of a robust alternative for supervised learning
algorithms is a difficult task to accomplish in human
action recognition.
The tasks concerning the action classification gen-
erally have four major phases: data acquisition, seg-
ment labeling, feature engineering, and finally train-
ing the classifier. The data can be acquired using dif-
ferent sensing modalities (for example video streams,
IMUs, point clouds, etc.). If a sequence of several
movements is recorded, the data needs to be prepro-
cessed and segmented into smaller movement entities
and action labels need to be assigned to each segment.
Then, features have to be extracted from raw motion
data and normalized. Lastly, a classifier to recognize
and infer the actions needs to be trained. The pipeline
for the creation of the dataset and labeling strategies
used in this work is depicted in Figure 1. The data la-
beling phase is a tedious and time-consuming process
and poses a major constraint in the creation of a robust
action recognition dataset. The data recorded using
RGB cameras and RGB-D cameras are easy to obtain,
and they provide rich appearance information. Thus,
it makes the labeling task less complicated. On the
other hand, sensor data recorded either using IMUs
or marker-based motion capture system requires care-
ful analysis of time series data to extract the stream
of motions and assign a set of actions to it. There are
previous works that propose to facilitate the data an-
notation process for time series data, e.g. Schr
¨
oder
et al. developed a tool support that makes use of a
database schema for annotating sensor data (Schr
¨
oder
et al., 2016). Cruciani et al. proposed a heuristic func-
338
Siddiqui, S., Gutzeit, L. and Kirchner, F.
The Influence of Labeling Techniques in Classifying Human Manipulation Movement of Different Speed.
DOI: 10.5220/0010906900003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 338-345
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
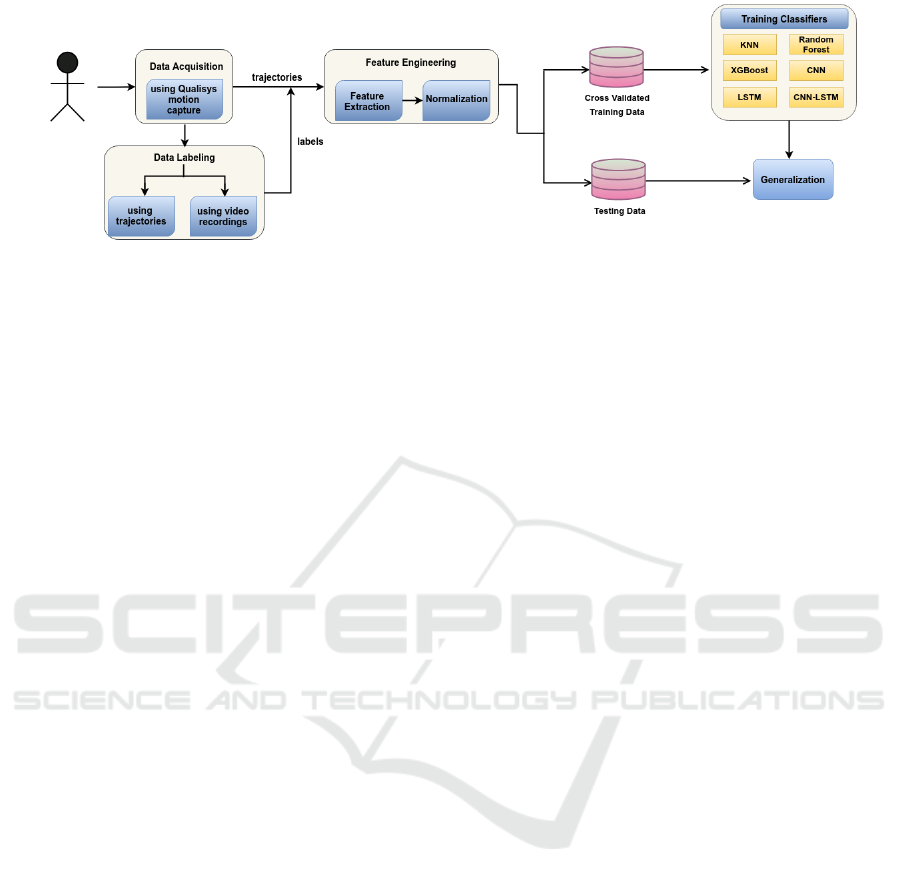
Figure 1: Pipeline for creation of a human action recognition dataset and classification approach. Inspired from (Zhang et al.,
2019).
tion based on step count and GPS information for on-
line supervised training (Cruciani et al., 2018). An-
other technique is to utilize few-shot learning meth-
ods as mentioned in (Gutzeit, 2021), where small en-
tities of human manipulation movements can be de-
tected at high accuracy with ≤ 10 examples per class
in the training data. Using the models trained on such
a small dataset, it can be generalized to new unlabeled
data.
In this paper, the influence of different labeling
methods on the classification of human movements
is investigated. Human movement is recorded based
on a simple stacking scenario using a marker-based
motion tracking system that measures the 3D po-
sitions of the human arm. Additionally, videos of
the movements are recorded. After that, the record-
ings are labeled using two different methods. In the
first labeling approach, the stacking movements are
manually segmented using the video data. In the
second method, recorded movement trajectories are
automatically segmented into manipulation building
blocks characterized by a bell-shaped velocity pro-
file of the hand (Gutzeit et al., 2014) followed by
manual correction of wrongly segmented data. The
stacking movements are labeled carefully by exam-
ining the trajectory of the arm while performing the
experiments using a labeling tool developed in-house,
which visualizes the movement trajectories in 2D and
3D. Six different algorithms that are widely used for
human action recognition, the k-Nearest Neighbor
(KNN) classifier, Decision-Tree based classifier Ran-
dom Forest (RF), Extreme Gradient Boosting (XG-
Boost), Deep Learning algorithms such as Convo-
lutional Neural Networks (CNN), Long Short-Term
Memory networks (LSTM), and a combination of
CNN-LSTM networks are compared with respect to
their suitability to label the movements automatically.
The models are trained and evaluated on movements
recorded at different speeds in order to study the influ-
ence of labeling techniques on the feasibility of trans-
fer of speed in simple action movements. This paper
is organized as follows: In section 2, an overview of
related work is given. In section 3, the feature ex-
traction and algorithms used for classification are de-
scribed, along with the evaluation approaches. The
data recording and the labeling procedure along with
results and discussions are presented in section 4 and
section 5 respectively. The paper concludes with fu-
ture scope of this work in section 6.
2 RELATED WORK
There is already a lot of work done on action recogni-
tion, involving vision-based and sensor-based modal-
ities. The video streams provide rich spatial informa-
tion and when it combines with the temporal informa-
tion, i.e., image frames at time steps, it can be bene-
ficial for the identification of human actions. Starting
from the analysis of video streams, earlier works in-
volved the usage of handcrafted feature-based meth-
ods such as the position of skeleton joints for action
recognition tasks (Wang and Schmid, 2013). In re-
cent times, CNN-based approaches are quite popular
because of their benchmarked results in computer vi-
sion problems and their ability to extract high-level
representation in deep layers. Donahue et al. intro-
duced the Long-term Recurrent Convolutional Net-
work (LRCN) consisting of a 2D CNN and LSTM
for extracting RGB features and predicting action la-
bels from each image (Donahue et al., 2015). Ji
et al. tried to capture the motion information from
several adjacent frames by extracting spatial and tem-
poral dimension features by performing 3D convolu-
tions on the videos (Ji et al., 2013). The vision-based
modalities require the use of an appropriately placed
camera that poses mobility issues and privacy risks.
With the availability of low-cost sensors and activ-
ity trackers in smartphones, a sudden shift has been
observed in the usage of cameras for action recogni-
tion tasks. Halloran et al. presented a comparison of
Deep Learning models in human activity recognition
The Influence of Labeling Techniques in Classifying Human Manipulation Movement of Different Speed
339

on the MHEALTH dataset recorded using a smart-
phone (O’Halloran and Curry, 2019). They com-
pared machine learning models on sensor-based data
utilizing supervised learning methods. Some recent
works provide an alternative of using a labeled dataset
and propose to train the model using semi-supervised
methods, such as label propagation, requiring a less
labeled dataset. Cruciani et al. proposed a heuristic
function-based method for automatic labeling in an
online supervised training approach (Cruciani et al.,
2018). The algorithm generated weak labels by com-
bining step count and GPS information. Shamsipour
et al. addressed the issue of labeling videos by con-
sidering only a few frames depicting the information
of humans performing a particular activity (Sham-
sipour et al., 2017). They randomly selected three
video frames instead of employing all the frames, and
used CNN for extracting features and SVM for clas-
sifying actions from the conceptual features. How-
ever, the majority of the approaches in the literature
are applied to whole-body human movements, such
as walking, running, or sitting. In this work, we
compared the classifiers’ performance on movement
building blocks that can be found in natural and in-
tuitively performed movements and that can poten-
tially be transferred to a robotic system using learn-
ing from demonstration (Gutzeit et al., 2019a). To our
knowledge, there has been no previous work available
that analyzes the influence of labeling techniques in
movement classification and examines the possibility
of speed transfer in action movements.
3 METHODS
In this section, the features that are extracted from the
raw movement trajectories captured using a Qualisys
motion capture system are described, along with the
classification algorithms and the hyperparameter opti-
mization methods used for training those algorithms.
3.1 Feature Extraction
Feature extraction is an important procedure in train-
ing machine learning algorithms. A meaningful rep-
resentation of raw data can have a huge influence on
the performance of predictive models. In this work,
features are extracted from raw motion data in the
same manner as mentioned in (Gutzeit, 2021). The
data is recorded using a marker-based motion capture
system with several markers placed on the arm of the
subject as shown in Fig 2. The marker positions are
transformed into a global coordinate frame with re-
spect to the markers placed on the back of the sub-
ject. The features extracted directly from the raw data
are the marker’s 3D positions, velocity, orientation,
and joint angle between them. The feature trajectories
were interpolated to the same length and normalized
in the range [0, 1].
3.2 Classification Models
3.2.1 K-Nearest Neighbor
KNN uses the proximity between the test data and al-
ready available training data to classify a sample. The
closest proximity of the test data from the training
data can be determined using distance metrics such as
Euclidean, Manhattan, or Minkowski. We use KNN
for comparison in this work because it performed ex-
ceptionally well on classifying human movement in
a small-sized training dataset (Gutzeit et al., 2019b).
The feature trajectories for each movement recording
are transformed into a 1-D feature vector. The clos-
est neighbor of each data sample is determined using
Euclidean distance, and the number of neighbors K
required to classify the test data is tuned using grid
search.
3.2.2 Random Forest
Random Forest is a bagging algorithm where random
bootstrap samples are drawn from the training data
and multiple decision trees are constructed. Each in-
dividual tree in the random forest outputs a class pre-
diction, and the overall prediction results of the model
are obtained by a voting approach on the individual
decision tree outputs (Ho, 1995). Due to the ran-
dom selection of training data and features, the con-
structed decision trees are independent of each other,
which makes the model resistant to overfitting prob-
lems. This improves its predictive performance and
generalization abilities on unseen data. As the deci-
sion trees are generated in parallel at the time of train-
ing, it results in a speed-up of the training process. In
this work, we have used a Random Forest classifier
with grid search to tune the hyperparameters, such as
the number of trees and the maximum depth of each
decision tree in the algorithm.
3.2.3 Extreme Gradient Boosting
XGBoost (Chen and Guestrin, 2016) is one of the
most popular machine learning algorithms in recent
times, widely used in structured and tabular data.
XGBoost is a decision-tree-based ensemble algorithm
that utilizes a gradient boosting framework and effi-
ciently makes use of parallel processing and cache op-
timization for better speed and performance. Boost-
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
340

ing algorithms attempt to accurately predict the tar-
get variable by aggregating weak classifiers, which in
general do not perform so well individually but when
combined perform even better than the strongest indi-
vidual learner. In order to make the final prediction,
XGBoost sequentially adds the classifiers and fits the
new model on the residual or the errors of the previous
predictions that are then combined with previous trees
to make the final prediction. It employs gradient de-
scent when introducing new models to minimize the
loss.
3.2.4 Convolutional Neural Network
In the last half of the decade, CNN has been one of
the most popular variants of Neural Networks because
of their substantial contribution and benchmarked re-
sults for computer vision, natural language process-
ing (Kim, 2014) and time series based problems (Is-
mail Fawaz et al., 2019). Contrary to images, CNNs
in time series can be seen as a kernel sliding in only
one dimension instead of two dimensions. In this
work, a very simple Convolutional Neural Network
is proposed consisting of two 1D convolution layers
followed by a pooling layer, dense layer and an out-
put layer with a softmax activation. The number of
filters in the convolution layer, number of neurons in
the dense layer, learning rate, and type of optimizer
are modulated using Keras Tuner as mentioned in sec-
tion 3.2.7.
3.2.5 Long Short-term Memory
LSTMs were introduced by (Hochreiter and Schmid-
huber, 1997) and are explicitly designed to avoid the
long-term dependency problem exhibited in Recur-
rent Neural Networks. In Recurrent Neural Networks,
there are directed cycles between the units, i.e., they
propagate data forward and also backward and have
the ability to process arbitrary long sequences of in-
puts using their internal memory. But where the prob-
lems of gradient explosion and gradient disappear-
ance arise in RNN, LSTMs are able to avoid these
problems with their architecture modifications, such
as cell state, and its various gates. These gates are re-
sponsible to keep the essential information or forget it
during training. In this work, we use a simple struc-
ture with two LSTM layers followed by a dropout
layer and output layer with a softmax activation.
3.2.6 CNN-LSTM Network
CNNs are known to be a robust feature extractor
and capable of creating informative representations
of time series data. On the other hand, LSTM net-
works perform pretty well at extracting patterns for
long input sequences. The combination of both the
networks has shown good results on challenging se-
quential datasets (Mutegeki and Han, 2020). A CNN-
LSTM model is used comprising two 1D convolution
layers with ReLu activation function followed by 1D
max-pooling layer and a flattening layer for format-
ting the feature map so that it can be consumed by
the LSTM layer. Afterwards, the flattened feature
maps from the previous layers are fed as an input to
an LSTM layer followed by a dense layer and out-
put layer with a softmax activation. We have also
used a dropout layer, where randomly selected neu-
rons are ignored during training. It helps in making
the network capable of better generalization and less
likely to overfit the training data. The number of lay-
ers, learning rate, and type of optimizer is modulated
using Keras Tuner as mentioned in section 3.2.7. All
the mentioned Deep Learning models are trained us-
ing sparse categorical cross-entropy loss function for
20 epochs using Adam optimizer and early stopping
is used to stop the training if the accuracy on a val-
idation dataset did not increase in the last n epochs,
where n is called patience value to prevent the model
from overfitting the training data. The experiments
were automatically tracked using Weights & Biases
tool (Biewald, 2020).
3.2.7 Hyperparameter Optimization
Hyperparameter tuning plays a vital role in the per-
formance of machine learning algorithms. Hyper-
parameters can have a significant impact on model
training in terms of model accuracy, training time,
and computational requirements. In this work, Keras
Tuner (O’Malley et al., 2019) that can be seamlessly
integrated with Tensorflow 2 is used for tuning differ-
ent hyperparameters required in training deep learn-
ing models. Methods used for tuning hyperparame-
ters require defining a search space consisting of hy-
perparameters and their ranges that are needed to be
optimized. Some hyperparameters that are optimized
in this work are number of filters in convolution lay-
ers, number of units in LSTM layer, number of neu-
rons in the dense layer and, choice of optimizers.
For each of the above-mentioned parameters, a
range of its possible values is provided. Keras Tuner
supports different search heuristics (such as random
search, Hyperband, and Bayesian optimization) that
helps in finding the best value of the defined hy-
perparameter to enhance the model performance. In
this work, a Bayesian optimization search strategy is
utilized for the optimization of hyperparameters. It
eliminates the problem of choosing a combination of
The Influence of Labeling Techniques in Classifying Human Manipulation Movement of Different Speed
341

different hyperparameters randomly that could some-
times result in the abysmal combinations of parame-
ters. Thus, resulting in failure to improve the model
accuracy. Instead of choosing random combinations,
the Bayesian optimization strategy chooses the best
possible hyperparameters based on the model perfor-
mance of previous combinations. It constructs a prob-
abilistic representation of the performance of a given
Machine Learning algorithm, which is modeled using
Bayesian inference and Gaussian process.
3.3 Evaluation Approach
The six algorithms described in section 3.2 are com-
pared on the movement recordings labeled using
two different methods as mentioned in section 4.1.
The classifiers are trained on the data comprising
arm movements performed by the subject at a slow
and normal speed (section 4.1) and evaluated on the
movements performed by the subject at a fast speed.
The main focus of the experiments was to investigate
the impact of labeling techniques on the generaliza-
tion ability of the model for speed transfer in the fast-
paced movement. These movements were appropri-
ate for evaluating the trained model because segmen-
tation of the fast-paced movements into basic action
movements is more challenging compared to slower-
paced movements and requires precise tracking of the
subject’s arm position. The training data was divided
into 5 folds using stratified cross-validation. In each
split, the evaluation is performed on the unseen test
data. Finally, generalization accuracy with a standard
deviation of mean accuracy and F1 score is reported.
The dataset was completely balanced with an equal
number of data for each class.
4 EXPERIMENTAL DATA
4.1 Stacking Scenario Data
The experiment was conducted on a single subject
and movements were recorded with a Qualisys mo-
tion tracking system that uses infrared light reflect-
ing markers. Additionally, the performed movements
were recorded using a video camera. Markers were
attached to the right hand, elbow, shoulder and back
of the subjects, as shown in Figure 2. The marker
positions were tracked with 7 Qualisys cameras and
data was recorded at 500Hz. The subject was asked
to perform a basic stacking movement as shown in
Figure 3 where bricks of different colors were placed
on fixed positions on the table and the participant was
asked to place the bricks in the middle of the table
Figure 2: Stacking-scenario setup. Positions of markers at-
tached on the arm and the back of the subject are recorded
using a camera based motion tracking system.
by stacking it one by one. The experiment was per-
formed by arranging the bricks in different stacking
order: the green brick was always kept at the bot-
tom while the other bricks (red, blue, yellow) were ar-
ranged in different permutations. Thus, overall, 6 dif-
ferent stacking orders were recorded with three repeti-
tions of each stacking order. The movement for stack-
ing the bricks was recorded at three different speeds
(slow, normal, fast) for all 6 stacking orders. The nor-
mal and slow speed were intended to provide a com-
fortable speed for placing bricks from their respective
position to the middle of the table one over another,
while the fast speed challenged the participant. There
were many instances where the bricks were not suc-
cessfully placed over one another due to the fast arm
movement, resulting in bricks tripping over the table.
4.2 Labeling Techniques
The movement data was decomposed using
two different ways into 8 classes (middle2front,
front2middle, middle2left, left2middle, middle2right,
right2middle, middle2down, down2middle) based on
the position from where the bricks were supposed
to be picked and placed. In the first labeling tech-
nique, it was segmented using the video recorded
for the experiment that was synced precisely with
the data recorded from the Qualisys motion tracker.
The labeling method was quite tedious and time-
consuming, as one has to cautiously track the image
frames on the video where the subject picks and
places the bricks. Although tracking the movement
of the data recorded at slow and normal pace was
quite precise, labeling the data recorded at fast
pace was very challenging. In the second labeling
technique, the arm movement data was automatically
segmented using a velocity-based probabilistic
segmentation presented in (Gutzeit et al., 2014) into
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
342
basic movement units with a bell-shaped velocity.
The unnecessary trajectories were removed, and
essential segments required for training the model
were annotated using a labeling tool developed at our
institute, which visualizes the movement trajectories
in 2D and 3D. Using this tool, inaccurate segment
boundaries of the automatic segmentation approach
were corrected. After labeling the data using both
methods, the dataset consisted of 144 arm movements
each for slow and normal paced recordings and 192
arm movements for fast-paced recordings, that means
in total 480 labeled movement sequences were
available.
Figure 3: Stacking-scenario setup. The left image shows the
different positions of the bricks on the table, and the right
image shows one of the stacking examples. The bricks were
stacked at the position of the cross.
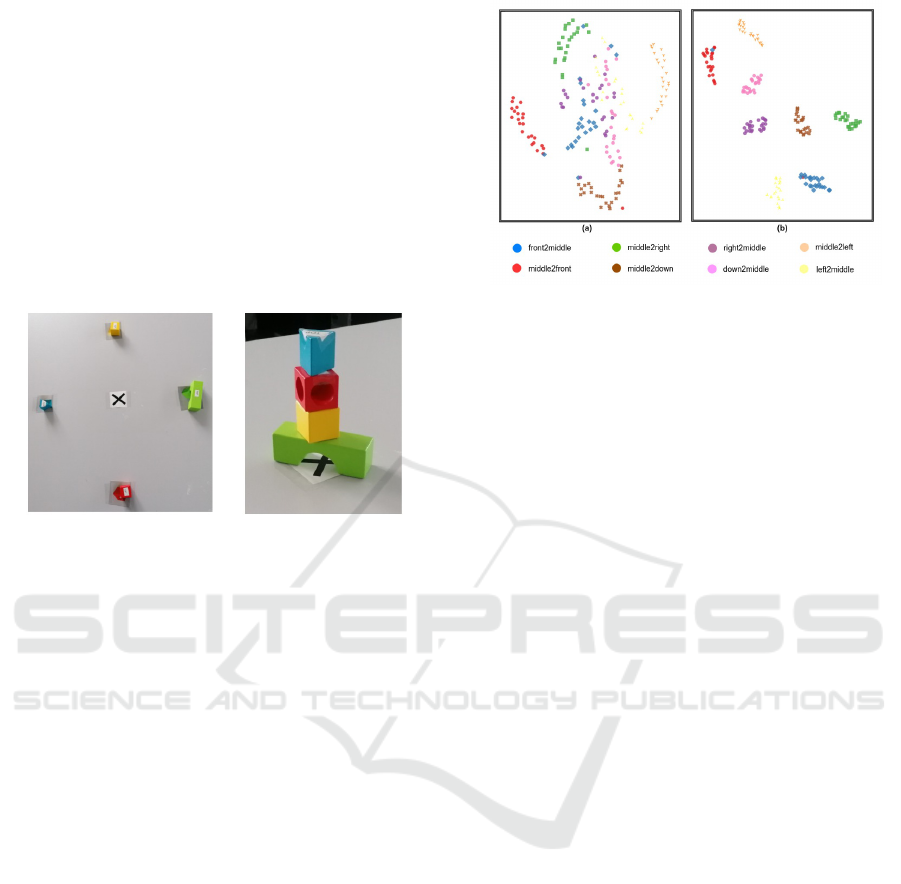
4.3 Complexity of the Dataset
In this section, we compare the structure and diver-
sity of the movement recordings labeled using above-
mentioned techniques. For understanding the over-
lapping between different classes in the dataset, t-
SNE (t-distributed Stochastic Neighbor Embedding)
introduced by (van der Maaten and Hinton, 2008)
is used for exploring a set of points in a high-
dimensional space by transforming it into a lower-
dimensional space. In Figure 4, we can see that data
from the stacking scenarios labeled using the move-
ment trajectories is less complex and are separated
more clearly, but one can see overlap in at least 4
classes in the segments labelled using videos.
5 RESULTS AND DISCUSSIONS
In this work, the generalization ability of differ-
ent models, such as KNN, Random Forest, XG-
Boost, CNN, LSTM, and CNN-LSTM model, to data
recorded at different speeds are compared using two
different strategies. The main aim was to demon-
strate the influence of labeling methods in movement
speed transfer within human movements. The clas-
Figure 4: T-SNE plots of the stacking scenarios recorded at
a fast pace (a) Data labeled using Videos (b). Data labeled
using movement trajectories. Each action movement labels
can be identified by a different color.
sifiers are trained on data consisting of movements
recorded at a slow and normal pace and tested on
data recorded on fast-paced movements. The results
of the generalization capabilities of the classifiers are
shown in Figure 5. As we can see from the plots, all
the classifiers have a much better generalization on
the fast-paced movements when training data is la-
beled using movement trajectories. The results illus-
trate the significance of labeling strategies and their
impact on classification accuracy irrespective of the
choice of classifiers. For the model trained on nor-
mal movements and labeled using trajectories, there
is almost 20% improvement in accuracy for all the
models except LSTM that has an accuracy difference
of approximately 35%. CNNs are the best perform-
ing model with a mean accuracy of 98% and F1-score
of 97.7% for normal movements labeled using tra-
jectories. For the model trained on slow movements
and labeled using trajectories, KNN was the best per-
forming model with an accuracy of 99% and an F1-
score of 98.5%, and all models except XGBoost have
an accuracy difference of approximately equal to or
greater than 16%. Precise labeling of the recordings
from videos requires meticulous tracking of the arm
by the labeling person, and there are chances of hu-
man errors in tracking the accurate frames from the
videos. That could be the reason for low accuracy
on data labeled using videos. As the dataset con-
sists of movements derived from simple stacking sce-
narios, distance-based algorithms performed consid-
erably better and were almost equivalent to CNNs in
performance. The LSTM classifiers fail to generalize
well, but providing more data by employing augmen-
tation techniques and training for more epochs could
further enhance the results.
The Influence of Labeling Techniques in Classifying Human Manipulation Movement of Different Speed
343

(a) (b)
(c) (d)
Figure 5: (a) and (c) Accuracy and F1 score comparison when model trained on slow movements. (b) and (d) Accuracy and
F1 Score comparison when model trained on normal movements.
6 CONCLUSION AND FUTURE
WORK
In this paper, we studied the impact of annotation
quality on the classification accuracy on data consist-
ing of basic human movements. Two different label-
ing strategies have been proposed and six different
Machine Learning and Deep Learning models were
compared. The potential possibility of speed trans-
fer using the model trained on the data labeled us-
ing these two strategies was examined. It is found
that fast-paced movements are better recognized on
data labeled using trajectories of the recorded move-
ments. The best results could be achieved with k-
Nearest Neighbor and CNNs, achieving an accuracy
of 99% and 98% on the model trained on slow and
normal paced movements respectively.
For future work regarding the movement recog-
nition models, some self-supervision methods that
showed promising results in the field of Computer
vision and NLP domain could be explored and there
are possibilities to leverage such networks for sensor
data in human action recognition. Although it does
not completely discard the usage of labeled data, it
learns useful representations of the data from the un-
labeled dataset, which can then be fine-tuned on a
small number of labeled data. Further, more focus
could be given to traditional machine learning meth-
ods for model explainability. It would help to prevent
model bias and could help to understand the working
of a model in a better way. Shapely values (Lund-
berg and Lee, 2017) and LIME (Ribeiro et al., 2016)
can give a rough idea about the features that greatly
influenced the performance of the classifiers. Model
interpretability has a huge prospect in the AI commu-
nity, one can compare the models used in this work
based on their interpretability to get a better under-
standing of these black-box models for human action
recognition tasks.
Regarding the influence of the labeling tech-
niques, the experiments conducted in this paper were
performed with just one subject on simple movement
data. For a deeper investigation of this influence,
the movements of more subjects and more complex
movements should be analyzed. Furthermore, not
only the labeling technique but also the experience of
the person labeling the data should be taken into ac-
count. However, the first small study presented in this
paper already shows that accurately segmented data
could significantly improve the movement classifica-
tion accuracy.
ACKNOWLEDGEMENTS
This work was supported through a grant of the Ger-
man Federal Ministry for Economic Affairs and En-
ergy (BMWi, FKZ 50 RA 2023).
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
344

REFERENCES
Biewald, L. (2020). Experiment tracking with weights and
biases. Software available from wandb.com.
Chen, T. and Guestrin, C. (2016). XGBoost: A scalable
tree boosting system. In Proceedings of the 22nd
ACM SIGKDD International Conference on Knowl-
edge Discovery and Data Mining, KDD ’16, pages
785–794, New York, NY, USA. ACM.
Cruciani, F., Cleland, I., Nugent, C., McCullagh, P., Synnes,
K., and Hallberg, J. (2018). Automatic annotation
for human activity recognition in free living using a
smartphone. Sensors, 18(7).
Donahue, J., Hendricks, L., Guadarrama, S., Rohrbach, M.,
Venugopalan, S., Darrell, T., and Saenko, K. (2015).
Long-term recurrent convolutional networks for visual
recognition and description. pages 2625–2634.
Gutzeit, L. (2021). A comparison of few-shot classification
of human movement trajectories. In Proceedings of
the 10th International Conference on Pattern Recog-
nition Applications and Methods (ICPRAM-2021),
February 4-6, Austria, pages 243–250. SciTePress.
Gutzeit, L., Fabisch, A., Petzold, C., Wiese, H., and Kirch-
ner, F. (2019a). Automated robot skill learning from
demonstration for various robot systems. In KI 2019:
Advances in Artificial Intelligence. German Confer-
ence on Artificial Intelligence (KI-2019), Septem-
ber 23-26, Kassel, Germany, LNAI, pages 168–181.
Springer.
Gutzeit, L., Otto, M., and Kirchner, E. A. (2019b). Simple
and robust automatic detection and recognition of hu-
man movement patterns in tasks of different complex-
ity. In Physiological Computing Systems. Springer.
Gutzeit, L., Schr
¨
oer, M., Metzen, J. H., and Kirchner, E. A.
(2014). Velocity-based multiple change-point infer-
ence for unsupervised segmentation of human move-
ment behavior. In Proceedings of the 22nd Inter-
national Conference on Pattern Recognition. Inter-
national Conference on Pattern Recognition (ICPR-
2014), 22nd, August 24-28, Stockholm, Sweden, pages
4564–4569. IEEE.
Ho, T. K. (1995). Random decision forests. In Proceedings
of 3rd international conference on document analysis
and recognition, volume 1, pages 278–282. IEEE.
Hochreiter, S. and Schmidhuber, J. (1997). Long short-term
memory. Neural computation, 9(8):1735–1780.
Ismail Fawaz, H., Forestier, G., Weber, J., Idoumghar, L.,
and Muller, P.-A. (2019). Deep learning for time series
classification: a review. Data Mining and Knowledge
Discovery, 33(4):917–963.
Ji, S., Xu, W., Yang, M., and Yu, K. (2013). 3d convolu-
tional neural networks for human action recognition.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 35(1):221–231.
Kim, Y. (2014). Convolutional neural networks for sentence
classification. In Proceedings of the 2014 Confer-
ence on Empirical Methods in Natural Language Pro-
cessing, EMNLP 2014, October 25-29, 2014, Doha,
Qatar, A meeting of SIGDAT, a Special Interest Group
of the ACL, pages 1746–1751.
Lundberg, S. and Lee, S. (2017). A unified approach to in-
terpreting model predictions. CoRR, abs/1705.07874.
Mutegeki, R. and Han, D. S. (2020). A cnn-lstm approach
to human activity recognition. In 2020 International
Conference on Artificial Intelligence in Information
and Communication (ICAIIC), pages 362–366.
O’Halloran, J. and Curry, E. W. J. (2019). A comparison
of deep learning models in human activity recognition
and behavioural prediction on the mhealth dataset. In
AICS.
O’Malley, T., Bursztein, E., Long, J., Chollet, F., Jin,
H., Invernizzi, L., et al. (2019). Kerastuner.
https://github.com/keras-team/keras-tuner.
Ribeiro, M. T., Singh, S., and Guestrin, C. (2016). ”why
should I trust you?”: Explaining the predictions of any
classifier. CoRR, abs/1602.04938.
Schr
¨
oder, M., Yordanova, K., Bader, S., and Kirste, T.
(2016). Tool support for the online annotation of sen-
sor data.
Shamsipour, G., Shanbehzadeh, J., and Sarrafzadeh, H.
(2017). Human action recognition by conceptual fea-
tures.
van der Maaten, L. and Hinton, G. (2008). Visualizing data
using t-SNE. Journal of Machine Learning Research,
9:2579–2605.
Wang, H. and Schmid, C. (2013). Action recognition with
improved trajectories. In 2013 IEEE International
Conference on Computer Vision, pages 3551–3558.
Zhang, W., Zhao, X., and Li, Z. (2019). A comprehensive
study of smartphone-based indoor activity recognition
via xgboost. IEEE Access, 7:80027–80042.
The Influence of Labeling Techniques in Classifying Human Manipulation Movement of Different Speed
345
