Generating High Resolution Depth Image from Low Resolution LiDAR
Data using RGB Image
Kento Yamakawa, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Japan
Keywords:
Depth Image, RGB Image, High Resolution, GAN.
Abstract:
In this paper, we propose a GAN that generates a high-resolution depth image from a low-resolution depth
image obtained from low-resolution LiDAR. Our method uses a high-resolution RGB image as a guide image,
and generate high-resolution depth image from low-resolution depth image efficiently by using GAN. The
results of the qualitative and quantitative evaluation show the effectiveness of the proposed method.
1 INTRODUCTION
In recent years, autonomous driving and driving sup-
port for vehicles are advancing, and it is becoming
more common to equip vehicles with various sensors.
Especially in autonomous driving, it is expected that
LiDAR will be installed in addition to the RGB cam-
era (Caesar et al., 2020). RGB cameras can acquire
high-resolution images at low cost, but they cannot
directly obtain depth images. Although many meth-
ods (Eigen et al., 2014; Laina et al., 2016; Godard
et al., 2017) have been proposed for estimating depth
images from RGB images by using deep neural net-
works, they are still inaccurate and suffer from the
domain shift problem.
LiDARs, on the other hand, have the advantage of
being able to acquire depth images directly. However,
they have low vertical resolution and are extremely
expensive. In order to realize autonomous driving, it
is important to obtain accurate high-resolution depth
images at low cost.
Thus, we in this paper propose a new method
for obtaining accurate high-resolution depth images
by combining high-resolution RGB images with low-
resolution depth images. In our method, we consider
image super resolution as an image inpainting prob-
lem for defect images, and use adversarial learning
(GAN (Goodfellow et al., 2014)) for obtaining high
resolution complemented images from low resolution
defect images of depth. We test two different types of
generators, and evaluate their performance. The pro-
posed GAN can generate high resolution depth im-
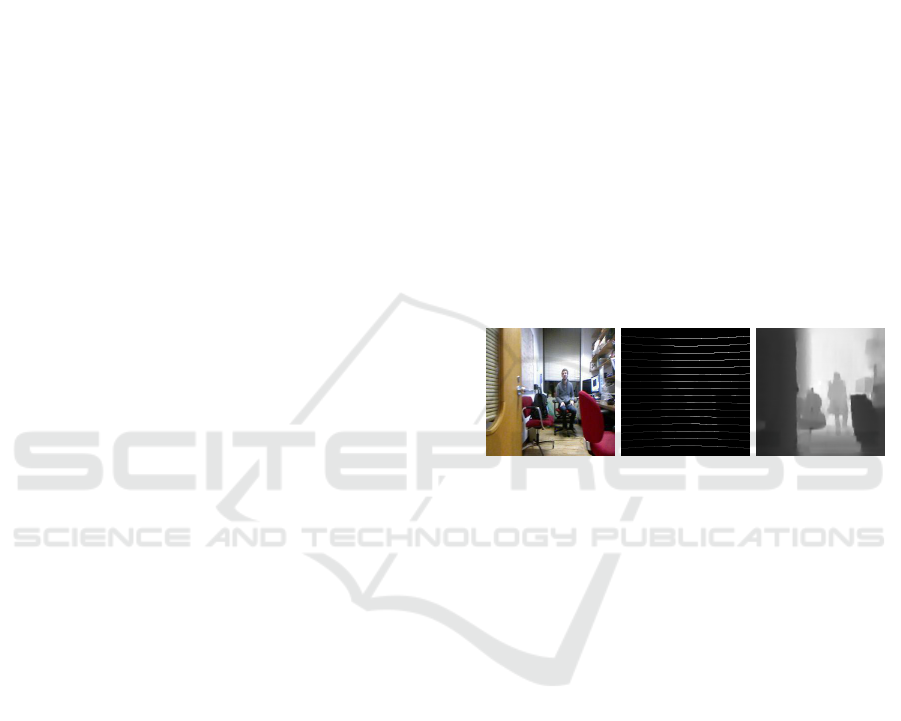
ages as shown in Fig. 1 (c) from RGB images and
(a) RGB image (b) LR depth image (c) HR depth image
(input) (input) (our result)
Figure 1: High resolution depth image generated from low-
resolution depth image of LiDAR by using our proposed
method. The low-resolution depth image is considered as
defect image with holes and image inpainting is conducted
for obtaining high resolution depth image with the proposed
method.
low-resolution depth images as shown in Fig. 1 (a)
and (b).
2 RELATED WORK
Many methods have been proposed for estimating
depth images from RGB images. While traditional
methods use parallax of stereo images (Vogiatzis
et al., 2005) (Hirschmuller, 2007), modern methods
can estimate a depth image from a single RGB image
by using a deep neural network (Eigen et al., 2014;
Laina et al., 2016; Godard et al., 2017). However,
these methods are not yet accurate enough and also
suffer from the domain shift problem. LiDARs, on
the other hand, have the advantage of being able to
acquire depth images directly. However, they have
low vertical resolution and are extremely expensive
compered to RGB cameras.
Yamakawa, K., Sakaue, F. and Sato, J.
Generating High Resolution Depth Image from Low Resolution LiDAR Data using RGB Image.
DOI: 10.5220/0010903900003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 4: VISAPP, pages
659-665
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
659
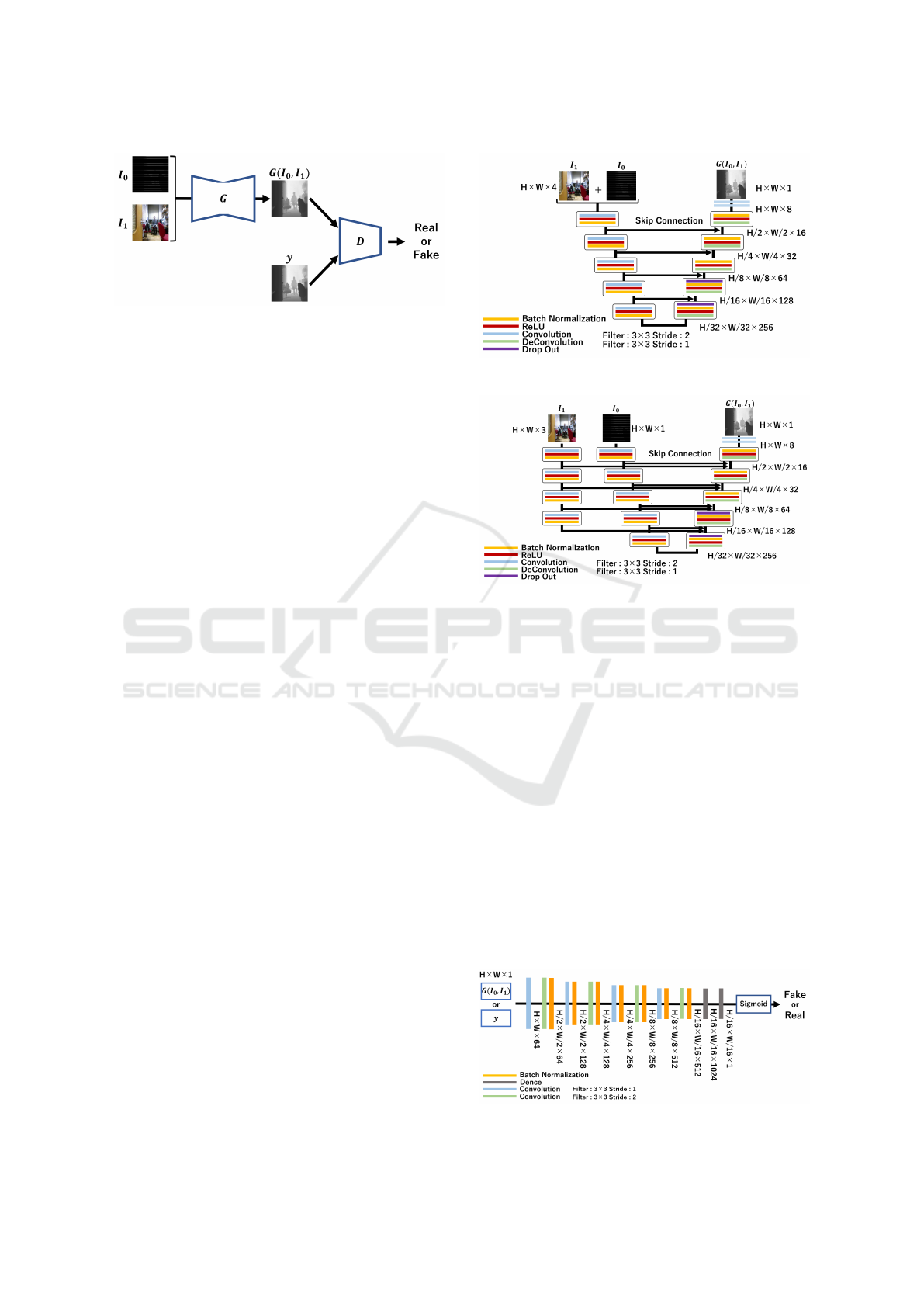
Figure 2: Network structure.
Image super-resolution, which generates a high-
resolution image from a low-resolution image, has
recently been improved in accuracy by using deep
learning (Ledig et al., 2017). The standard tech-
nique of super-resolution network is to up-sampling
the low-resolution images to obtain high-resolution
images. On the other hand, in this research, we con-
sider the image super-resolution as the image inpaint-
ing of sparse high-resolution images, and construct a
deep neural network for image inpainting of sparse
images. In particular, we use a high-resolution RGB
image as a guide image, and conduct image inpait-
ing for sparse high-resolution depth image obtained
by enlarging the original low-resolution depth image
to the same size as the high-resolution RGB image.
In this paper, the image inpainting is real-
ized by using the Generative Adversarial Network
(GAN) (Goodfellow et al., 2014). In GAN, it is
known that visually natural images can be generated
by training generator and discriminator adversarially.
In this paper, the GAN learns image inpainting to
generate a high-resolution depth image from a sparse
depth image using an RGB image as a guide.
3 GENERATING HIGH
RESOLUTION DEPTH IMAGE
FROM GAN
In this research, we propose a network that gener-
ates high-resolution depth images by image inpaint-
ing technique that reconstructs the missing part of the
depth image. A low-resolution depth image is consid-
ered as a high-resolution image lacking information,
and the task of inpainting the missing part is learned
using GAN to generate a high-resolution depth im-
age. By inputting the high-resolution RGB image as a
guide image to GAN, the high-frequency components
lacking in the low-resolution depth image are comple-
mented by the high-resolution RGB image, and more
accurate high-resolution depth image is generated.
Figure 3: Generator of Proposed method 1.
Figure 4: Generator of Proposed method 2.
3.1 Network Structure
The network used in this paper consists of a Gen-
erator that outputs a high-resolution depth image by
inputting a low-resolution depth image and a high-
resolution RGB image, and a Discriminator that dis-
criminates between a ground truth depth image and
a generated depth image. The low-resolution depth
images are converted to sparse high-resolution im-
ages before being input to the Generator. However,
in the following part of this paper, we use the term
low-resolution depth image for sparse high-resolution
images obtained by converting low resolution depth
images.
The Generator is based on U-net (Ronneberger
et al., 2015), which has been used in many image
generation tasks. U-net has skip connections, which
propagate the feature map of each layer in the encoder
to each layer in the decoder. By using the skip con-
Figure 5: Network structure of discriminator.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
660

(a) HR depth image
(ground truth)
(b) RGB image (c) LR depth image
(n = 16)
(d) LR depth image
(n = 8)
(e) LR depth image
(n = 4)
Figure 6: Example of dataset images.
nections, the input information is propagated to the
decoder part, and the image conversion can be real-
ized without losing the detailed information of the in-
put image. In each layer of the proposed network,
processing was performed in the order of Convolu-
tion → ReLU → Batch Normalization. In order to
suppress overfitting, Batch Normalization (Ioffe and
Szegedy, 2015) and Drop out layer were incorporated
in the bottom two layers of image generation in each
layer. When outputting the image, tanh was used as
the activation function.
In this research, we propose two methods, method
1 and 2, for using high-resolution RGB image and
low-resolution depth image in the Generator. The
network structure of method 1 is shown in Fig. 3.
This structure has traditionally been used to combine
multiple pieces of information, where low resolution
depth images (H ×W × 1) and high resolution RGB
image (H × W × 3)) are combined by concat before
inputting into the Generator, so the input image is
H × W × 4. On the other hand, the network struc-
ture of method 2 is shown in Fig. 4. In this method,
the RGB image and the depth image are convolved
separately, and the image features in each layer are
combined by skip connection. By using this method,
it is possible to retain the high resolution information
of the RGB image and convolve it into the image fea-
ture of the next layer. Therefore, when an image is
generated in the decoder of the U-net, a higher res-
olution depth image can be generated by convolving
the image feature that holds the high resolution infor-
mation.
We next explain the Discriminator used in the
proposed method. The structure of the Discrimina-
tor used in the proposed method is shown in Fig. 5.
We used Patch GAN for the Discriminator. Patch
GAN (Pathak et al., 2016) cuts out the image into fine
patches and determines the validity of the image for
each patch. By using this structure, it becomes pos-
sible to judge the validity of image with respect to
a local region of the image, and the image validity is
measured in various sizes. In each layer, processing is
performed in the order of Convolution → Batch Nor-
malization. Sigmoid was used as the output activation
function.
3.2 Network Training
Let G
∗
be the Generator obtained by training the
GAN. Then, the training of our GAN can be described
as follows:
G
∗
= argmin
G
max
D
L
GAN
(G, D) + λL
L1
(G) (1)
where, L
GAN
represents the adversarial loss shown in
the following equation:
Generating High Resolution Depth Image from Low Resolution LiDAR Data using RGB Image
661
L
GAN
(G, D) = E
y∼p
data(y)
[logD(y)]
+ E
I
0
,I
1
∼p
data(I
0
,I
1
)
[log(1 − D(G(I
0
, I
1
)))]
On the other hand, L
L1
represents L1 loss shown in
the following equation:
L
L1
(G) = E
y,I
0
,I
1
∼P
data(y,I
0
,I
1
)
[||y − G(I
0
, I
1
)||
1
]
where, y is the ground truth of the high-resolution
depth image, I
0
is a low-resolution depth image, and
I
1
is a high-resolution RGB image.
By training the network as shown in Eq. (1),
we obtain Generator which generates high-resolution
depth images from low-resolution depth images.
4 DATASET
We next explain the data set used in this research.
In order to learn the proposed network, pairs of
depth image and RGB image is required. Therefore,
we constructed a training dataset using NYU Depth
Dataset (Silberman and Fergus, 2011). NYU Depth
is an indoor image dataset, which consists of 2284
pairs of depth image and RGB image. The depth and
RGB images obtained from this dataset were resized
to 256 × 256, and 2184 pairs were used for train-
ing and 100 pairs were used for testing. In this re-
search, we conducted two experiments, a synthetic
image experiment in which a low-resolution depth
image obtained from LiDAR was created from a high-
resolution depth image synthetically, and a real image
experiment in which real low-resolution depth images
were obtained from LiDAR (Velodyne VLP-16). In
both cases, in order to investigate the change in ac-
curacy due to the difference in the amount of infor-
mation in the low-resolution depth image, we cre-
ated datasets with different vertical resolutions, n =
16, 8, and4, for low-resolution depth images. That is
the number of vertical scan lines of the LiDAR was
16, 8 and 4. The example dataset used in our experi-
ments is shown in the Fig. 6.
5 EXPERIMENTS
5.1 Synthetic Image Experiments
We next show the results of synthetic image exper-
iments, in which a high-resolution depth image is
generated from a low-resolution depth image and an
RGB image by using the proposed method. For com-
parison, we also generated the high-resolution image
from just a low-resolution depth image.
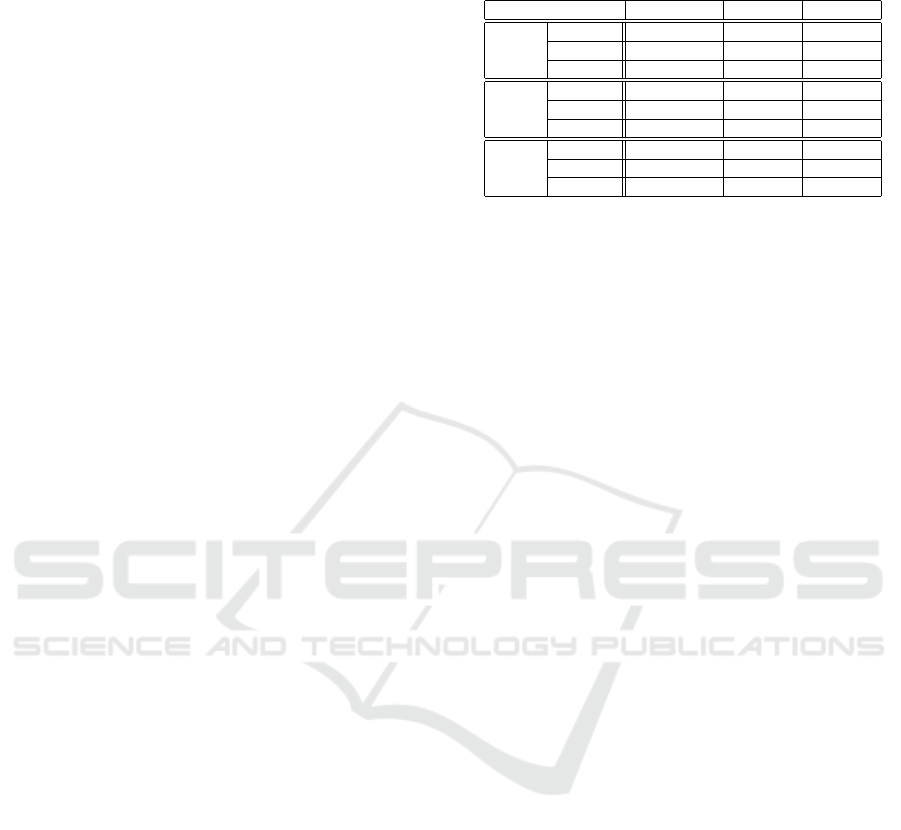
Table 1: Accuracy of recovered high-resolution depth im-
age.
LiDAR only method 1 method 2
RMSE ↓ 6.6462 5.7329 5.6673
n = 16 PSNR ↑ 32.187 33.4756 33.5886
SSIM ↑ 0.9453 0.9525 0.9529
RMSE 11.6271 9.2953 9.3441
n = 8 PSNR 27.2126 29.3198 29.1475
SSIM 0.9117 0.9289 0.9239
RMSE 19.2588 15.4661 16.3567
n = 4 PSNR 22.7405 24.7400 24.2165
SSIM 0.8828 0.9020 0.8914
Generator and Discriminator were trained for
5000 epochs. The batch size was 32, and
Adam (Kingma and Ba, 2014) was used with a learn-
ing rate of 0.001 for learning optimization.
For each low-resolution depth image of n = 16, 8,
and 4, the network was trained by using 2184 training
data, and high-resolution depth images were gener-
ated from 100 test low-resolution images by using the
trained network.
The experimental results are shown in Fig. 7.
From the result of n = 16 in Fig. 7 (a), we find that the
difference between the proposed method and the ex-
isting method with only depth images is small. How-
ever, as the vertical resolution of the input depth im-
age decreases to n = 8 and n = 4, the degradation
of the result in the existing method becomes very
large, and we find that the proposed method com-
bining RGB images can recover the high-resolution
depth image more accurately. For example, we find
that the shapes of the desk and chair are distorted in
the existing method, whereas the proposed method
can recover them more accurately.
Table 1 shows the accuracy of the recovered 100
high-resolution depth images in RMSE, PSNR, and
SSIM. From this table, we find that in any case of ver-
tical resolution, the proposed method using the RGB
image and the depth image can generate more accu-
rate high-resolution depth images than the existing
method.
5.2 Real Image Experiments
We next show the results obtained from real image
experiments. Similar to the synthetic image experi-
ments, training was performed with NYU Depth de-
taset, and the low-resolution depth image obtained
from a LiDAR (Velodyne VLP-16) were input to the
trained network to evaluate the performance of the
proposed method. We tested the proposed method and
the existing method while changing the vertical reso-
lution of LiDAR to n = 16, 8 and 4. Calibration of the
data between the RGB camera and LiDAR was con-
ducted in advance by using projective transformation.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
662
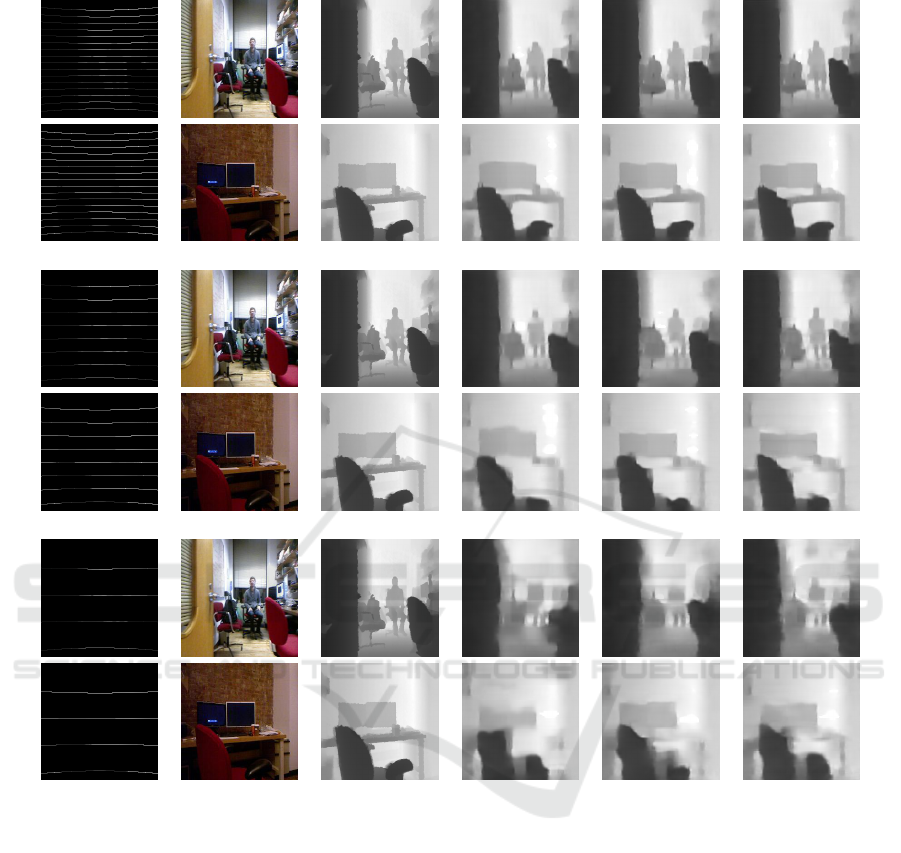
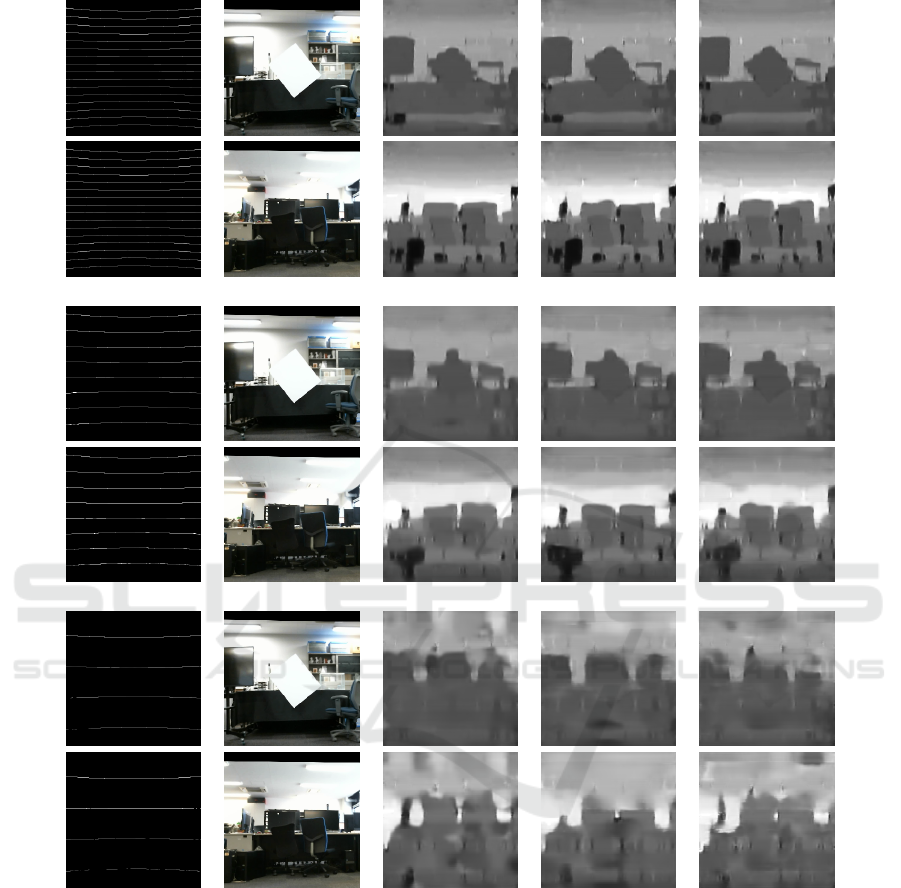
LR depth RGB image ground truth LiDAR only method 1 method 2
(a) n = 16
(b) n = 8
(c) n = 4
Figure 7: Synthetic image experiments.
The recovered high resolution depth images ob-
tained from the proposed method and the existing
method are shown in Fig. 8. As shown in this figure
no difference was observed when n = 8 and n = 4,
but in the result of n = 16, we fined that the moni-
tor and desk in the upper scene were recovered more
accurately by the proposed method.
Although we need more systematic evaluations,
the results of the synthetic image experiments and real
image experiments show the effectiveness of the pro-
posed method.
6 CONCLUSION
In this paper, we proposed a method for obtain-
ing high-resolution depth images from low-resolution
depth data obtained from LiDAR. In particular we
proposed a GAN based network that combines high-
resolution RGB image with low-resolution depth im-
age.
We conducted synthetic and real image exper-
iments to generate a high-resolution depth images
using the proposed network. In the synthetic im-
age experiments, we used NYU Depth dataset for
training and testing, and showed that the proposed
method can generate high-resolution depth images
Generating High Resolution Depth Image from Low Resolution LiDAR Data using RGB Image
663
LR depth RGB image LiDAR only method 1 method 2
(a) n = 16
(b) n = 8
(c) n = 4
Figure 8: Real image experiments.
more accurately than the existing method that uses
only low-resolution depth images as input. We also
conducted experiments using real LiDAR data and
showed that the proposed method can generate more
accurate high-resolution depth images.
Although the study is still in its early stage, we
will evaluate various network structures in the future
to show the effectiveness of image inpainting using
guide images.
REFERENCES
Caesar, H., Bankiti, V., Lang, A. H., Vora, S., Liong, V. E.,
Xu, Q., Krishnan, A., Pan, Y., Baldan, G., and Bei-
jbom, O. (2020). nuscenes: A multimodal dataset for
autonomous driving. In Proceedings of the IEEE/CVF
conference on computer vision and pattern recogni-
tion, pages 11621–11631.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. arXiv preprint arXiv:1406.2283.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
664

Godard, C., Mac Aodha, O., and Brostow, G. J. (2017).
Unsupervised monocular depth estimation with left-
right consistency. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 270–279.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial nets. In
Advances in neural information processing systems,
pages 2672–2680.
Hirschmuller, H. (2007). Stereo processing by semiglobal
matching and mutual information. IEEE Transac-
tions on pattern analysis and machine intelligence,
30(2):328–341.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. arXiv preprint arXiv:1502.03167.
Kingma, D. P. and Ba, J. (2014). Adam: A
method for stochastic optimization. arXiv preprint
arXiv:1412.6980.
Laina, I., Rupprecht, C., Belagiannis, V., Tombari, F., and
Navab, N. (2016). Deeper depth prediction with fully
convolutional residual networks. In 2016 Fourth inter-
national conference on 3D vision (3DV), pages 239–
248. IEEE.
Ledig, C., Theis, L., Huszar, F., Caballero, J., Cunning-
ham, A., Acosta, A., Aitken, A., Tejani, A., Totz, J.,
Wang, Z., and Shi, W. (2017). Photo-realistic single
image super-resolution using a generative adversarial
network. In CVPR.
Pathak, D., Krahenbuhl, P., Donahue, J., Darrell, T., and
Efros, A. A. (2016). Context encoders: Feature learn-
ing by inpainting. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition,
pages 2536–2544.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Silberman, N. and Fergus, R. (2011). Indoor scene segmen-
tation using a structured light sensor. In Proceedings
of the International Conference on Computer Vision -
Workshop on 3D Representation and Recognition.
Vogiatzis, G., Torr, P. H., and Cipolla, R. (2005). Multi-
view stereo via volumetric graph-cuts. In 2005 IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition (CVPR’05), volume 2, pages
391–398. IEEE.
Generating High Resolution Depth Image from Low Resolution LiDAR Data using RGB Image
665
