
Task Handover Negotiation Protocol for Planned Suspension based on
Estimated Chances of Negotiations in Multi-agent Patrolling
Sota Tsuiki, Keisuke Yoneda and Toshiharu Sugawara
a
Department of Computer Science and Communication Engineering, Waseda University, Tokyo169855, Japan
Keywords:
Multi-agent Patrolling Problem, Negotiation, Task Delegation, Coordination, Periodic Inspection, Scheduled
Suspension, Timed Patrol.
Abstract:
We propose a negotiation method that mitigates performance degradation in the multi-agent cooperative pa-
trolling problem not only during planned suspensions for periodic inspection and replacement, but also during
the transition period to the suspension. Recent developments in machine and information technologies have
led to the expectation of using multiple intelligent agents to control robots. In particular, cooperation between
multiple agents is necessary to process tasks that require complex and diverse capabilities or encompass a large
environment. Because robots are machines, they need to be regularly inspected and replaced with new ones
to prevent unexpected failures and prolong their lifespans. However, suspending agents for such inspections
may cause a rapid performance degradation that cannot be neglected in some applications. Such suspensions
are usually planned, and the transition period is known in advance, that is, we know which agents will be
suspended and when. Our proposed negotiation method allows agents that are scheduled for suspension to
hand over important tasks that should not be neglected to other agents. This mitigates the performance degra-
dation during both the transition and suspension periods. The experimental results show that the performance
degradation can be significantly reduced compared to existing methods, especially for security surveillance
applications.
1 INTRODUCTION
With the recent development of AI technology, there
is a demand for applications that use networked
agents, such as intelligent sensors and autonomous
robots, to perform dangerous tasks that are impossi-
ble for humans to perform or sophisticated and com-
plex tasks on behalf of humans. In particular, the use
of multiple cooperative agents is expected in large
environments and high-complexity tasks. A prob-
lem that abstracts such tasks is the multi-agent co-
operative patrolling problem (MACPP). In this prob-
lem, agents patrol a particular environment simulta-
neously, and cooperate with and complement one an-
other to accomplish, for example, security surveil-
lance (Chen et al., 2015), environmental monitoring
(Rezazadeh and Kia, 2019; Zhou et al., 2020), and
cleaning/sweeping in warehouses and public spaces
(Altshuler et al., 2011; Wagner et al., 2008; Li et al.,
2021).
However, because the agents autonomously deter-
mine appropriate actions from their own perspectives,
a
https://orcid.org/0000-0002-9271-4507
cooperation and coordination between the agents are
necessary not only for each individual agent to ac-
complish its work, but also to avoid actions such as
collisions that can prevent other agents from work-
ing as well as to ensure overall efficiency by elimi-
nating overlapping redundant work with other agents.
However, it is not easy to design and implement co-
operative behavior in advance because many factors,
such as the temporal and spatial constraints and capa-
bilities of all the agents, must be considered. How-
ever, these factors are difficult to understand fully in
the design phase. Therefore, an autonomous learning
method strategy for efficient cooperative behavior be-
tween multiple agents is required in which the capa-
bilities of each individual agent and the other agents,
the characteristics of the environment, and the learned
behaviors of other cooperative agents are considered.
Moreover, if the agents are self-driving robots or ma-
chines, it is probable that they will stop for periodic
inspections over relatively long cycles that alternate
between agents , as well stop over relatively short cy-
cles, such as for recharging. Performance degrada-
tion during these suspension periods, especially for
Tsuiki, S., Yoneda, K. and Sugawara, T.
Task Handover Negotiation Protocol for Planned Suspension based on Estimated Chances of Negotiations in Multi-agent Patrolling.
DOI: 10.5220/0010896900003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 83-93
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
83

a longer cycles that require longer suspension time,
must be reduced as much as possible.
There have been several studies on MACPP based
on two major approaches for cooperation and coor-
dination between agents. In the first approach, the
agents divide the environment into areas of responsi-
bility by themselves explicitly and assign each area
to one or a few agents (Ahmadi and Stone, 2006;
Elor and Bruckstein, 2009; Kato and Sugawara, 2013;
Zhou et al., 2019). For example, Elor and Bruckstein
(Elor and Bruckstein, 2009) proposed an area parti-
tioning method to balance the sizes of subareas allo-
cated to individual agents based on the balloon pres-
sure model. However, if a few agents leave the sys-
tem for inspection, the assignments will need to be
recalculated from scratch, and the results for the en-
vironmental characteristics learned by the individual
agents may become useless.
In the second approach, the agents autonomously
select patrol strategies and algorithms according to
the environment and the behaviors of the other agents
without an explicit division of the environment (Kalra
et al., 2005; Elmaliach et al., 2007; Sampaio et al.,
2010; Yoneda et al., 2015; Sugiyama et al., 2019;
Othmani-Guibourg et al., 2017; Othmani-Guibourg
et al., 2018). For example, Yoneda et al. proposed
the adaptive meta-target decision strategy (AMTDS)
in which each agent autonomously decides on an ap-
propriate patrol strategy using reinforcement learning
while learning the frequency of visit requests for each
location in the environment (Yoneda et al., 2015).
Sugiyama et al. proposed AMTDS with learning of
event probabilities to enhance divisional cooperation
(AMTDS/EDC), which is an extension of AMTDS
through the addition of a dynamic and lightweight
negotiation method to balance the workloads of the
agents (Sugiyama et al., 2019). We chose the sec-
ond approach in the present study because it is more
appropriate for addressing the periodic suspension of
agents. However, we found that when the number of
agents suddenly becomes lower because of periodic
suspensions, there is a temporary but considerable
decrease in the total performance. The performance
degradation cannot be neglected in some critical ap-
plications, such as security patrols, to avoid security
gaps.
To address this issue, Tsuiki et al. proposed
a method called AMTDS with task handover for
scheduled suspension (AMTDS/TH) to mitigate the
overall performance degradation when some agents
are suspended for inspection (Tsuiki et al., 2021).
In this approach, the negotiation protocol used in
AMTDS/EDC is extended and used when agents are
in close proximity to one another because of the lim-
itations of Wi-Fi communications. Because the tran-
sition period for the next suspension of some agents
is known in advance, that is, which agents will be
stopped and when, the agents that are scheduled for
suspension can gradually delegate or hand over some
of their tasks to other agents to reduce the perfor-
mance degradation. It was shown that this method can
mitigate the temporary but significant performance
degradation due to the planned suspension. However,
the number of tasks that are delegated to other agents
before the suspension is fixed and cannot be flexibly
changed. It is also difficult to determine the appropri-
ate number of tasks to hand over. This led to a large
decrease in efficiency before suspension that canceled
out the performance improvement during the suspen-
sion period.
Therefore, in this study, we integrate a novelnego-
tiation method with conventional AMTDS/TH to es-
timate the number of tasks that should be delegated
to other agents during the transition period. The de-
crease in performance is thereby mitigated not only
during the planned suspension period but also dur-
ing the preceding transition period. We then con-
ducted experiments for the two MACPP applications
of cleaning/sweeping and security surveillance, and
evaluated the proposed method by comparing its per-
formance with those of the previous AMTDS/TH
method and other conventional methods.
2 RELATED WORK
Many studies to enable cooperative and coordinated
behavior between multiple agents to execute an
MACPP instance efficiently and effectivelyhave been
conducted. As mentioned in the previous section,
there are two major approaches for agent coordina-
tion in MACPPs. The first approach involves the di-
vision of the environment into distinct subareas that
one or a few agents are in charge of autonomously so
that the agents can work cooperatively with high ef-
ficiency while avoiding conflicts and redundant work
(Ahmadi and Stone, 2006; Elor and Bruckstein, 2009;
Kato and Sugawara, 2013; Zhou et al., 2019; Xie
et al., 2020). For example, Ahmadi and Stone pro-
posed a method to partition the areas of responsibility
through negotiations in an environment in which the
frequency of events is possibly non-uniform, as in our
case, and the agents should visit the locations with
different frequencies. Hence, the area is partitioned
by the agents to balance their visiting frequency (Ah-
madi and Stone, 2006). Elor and Bruckstein pro-
posed a method to divide the environment into areas
of responsibility for individual agents by equalizing
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
84

their expansion force. This method was inspired by
the pressure model of a balloon (Elor and Bruckstein,
2009).
The second approach is to autonomously decide
on an appropriate patrol strategy based on the sur-
rounding environment and the state of the agents
without explicitly dividing the environment in ad-
vance (Kalra et al., 2005; Elmaliach et al., 2007; Sam-
paio et al., 2010; Yoneda et al., 2015; Sugiyama et al.,
2019). For example, Elmaliach et al. proposed a
method in which the patrol paths in the environment
are generated and assigned to individual agents (El-
maliach et al., 2007). Sugiyama et al. proposed a
negotiation protocol to balance the workload between
agents by exchanging information about the locations
that should be visited frequently (Sugiyama et al.,
2019). We chose the second approach because ef-
ficiency may be negatively impacted in the first ap-
proach when no agents are assigned to certain ar-
eas. However, even in the second approach, the previ-
ous studies have not considered temporal suspension.
Planned suspensions can result in significant perfor-
mance degradation. In particular, Sugiyama et al. re-
ported that sudden stoppages considerable reduce ef-
ficiency (Sugiyama et al., 2019).
Some recent studies have used learning algorithms
to enable multiple agents to patrol an environment
in a cooperative manner (Zhou et al., 2019; Xie
et al., 2020). For example, Zhou et al. formulated
the patrolling problem as a Bayes-adaptive transition-
decoupled partially observable Markov decision pro-
cess and introduced a decentralized online learning
algorithm using the Monte Carlo tree search method
(Zhou et al., 2019). Xie et al. used particle swarm
optimization (PSO) to find reasonable patrol paths
by partitioning the environment (Xie et al., 2020).
Othmani-Guibourg et al. proposed the learning of
distributed multi-agent patrol strategies using a long
short-term memory (LSTM) network which is embed-
ded in each agent and trained using data generated in
a simulated environment. The network then navigates
the agent in the environment to be patrolled by deter-
mining its next movement (Othmani-Guibourg et al.,
2018). However, these studies also did not consider
the significant deterioration that results when peri-
odic suspensions cause sudden changes in the envi-
ronment, which includes the other agents.
There are a number of studies on planned suspen-
sion/stoppages in multi-agent frameworks. Panteleev
et al. and Ghita et al. proposed methods to produce
plans for the periodic maintenance/inspection and re-
pair of technical equipment using a multi-agent sim-
ulation environment (Panteleev et al., 2014; Ghita
et al., 2018). These studies differ from ours in that
their aim is to develop work plans that account for
planned leaves to reduce the workload of staff manag-
ing technical equipment. In other research fields, for
example, Gavranis and Kozanidis developed an algo-
rithm for the flight maintenance problem (FMP prob-
lem) (Gavranis and Kozanidis, 2015). Seif and An-
drew extended this algorithm to solve the operation
and maintenance planning problem, which is a gener-
alized version of the FMP problem (Seif and Andrew,
2018). Moradi and Shadrokh proposed a robust trust-
based scheduling system that uses a heuristic algo-
rithm for efficient resource allocation to ensure the re-
liability of the system for scheduling maintenance ac-
tivities during planned shutdowns with unknown ac-
tivity durations (Moradi and Shadrokh, 2019). How-
ever, to the best of our knowledge, these methods re-
quire centralized control, and there is no study so far
on methods for autonomous agents to prepare for the
planned suspension by themselves.
3 MACPP MODEL
The MACPP model and issues addressed in this study
are the same as those in the conventional studies
(Sugiyama et al., 2019; Tsuiki et al., 2021), and are
described in detail below.
3.1 Environment
The environment patrolled by the agents is repre-
sented by a graph, G = (V,E), embedded in a two-
dimensional Euclidean space, where V = {v
1
,... , v
n
}
is the set of nodes corresponding to locations in the
environment, and E is the set of edges e
i, j
connect-
ing nodes v
i
and v
j
in V. An agent, an event, and
an obstacle can exist at node v ∈ V. Note that the
events in this study can vary depending on the appli-
cation; for example, in a security surveillance appli-
cation, the number of events in a location corresponds
to the alert level at the location, and the accumula-
tion of events represents an increase in the alert level.
In other examples, an event in a cleaning application
corresponds to the accumulation of a piece of dirt at
a location and the task is to vacuum the accumulated
dirt up; in an egg collection application, an event is
the laying of an egg on a certain area of the ground
in a free-range farm, and the task is to collect the laid
eggs (Li et al., 2021).
The length of all the edges can be assumed to be
one without the loss of generality by adding dummy
nodes as needed. Let d(v
i
,v
j
) be the shortest distance
between v
i
and v
j
(i.e., the minimum number of edges
between two nodes), and m(v
i
,v
j
) be the Euclidean
Task Handover Negotiation Protocol for Planned Suspension based on Estimated Chances of Negotiations in Multi-agent Patrolling
85

distance. We introduce a discrete time with the unit
of a time step and assume that an agent can move to a
neighboring node and process the tasks on the current
node in a time step.
For a node ∀v ∈ V, we denote the event occurrence
probability at v as p(v) (0 ≤ p(v) ≤ 1) at every time
step. At time step t, the numberof accumulatedevents
L
t
(v) on node v is updated as
L
t
(v) =
L
t−1
(v) + 1 (if an event occurs)
L
t−1
(v) (otherwise, i.e., with
probability 1− p(v)).
When an agent arrives at v, all events on v are pro-
cessed and eliminated by executing the corresponding
tasks, and L
t
(v) is set to 0.
3.2 Agents and Their Behaviors
Let A = {1, .. ., n} be a set of n agents. Agent i ∈ A has
a finite capacity battery and must return to its charg-
ing base before the battery level reaches zero. Agent
i assigns an importance p
i
(v) to each node ∀v ∈ V.
p
i
(v) is the predicted probability of event occurrence
inferred from the number of events executed by the
agent itself (0 ≤ p
i
(v) ≤ 1). Note that because p
i
(v)
is the probability predicted by each individual agent,
it can differ between agents, even for the same node
v. The calculation of p
i
(v) is described in Section 3.3.
Although i cannot directly access the value of
L(v), it can estimate the number of events EL
i
t
(v) ac-
cumulated at node v at time t using the predicted p
i
(v)
through
EL
i
t
(v) = p
i
(v) × (t − t
v
vis
),
where t
v
vis
is the time when node v is most recently
visited by an agent, and t
v
vis
is assumed to be shared
with all the agents.
The agent i decides its actions as follows: First, it
determines the next target node v
i
tar
through a target
decision strategy (TDS), generates a path to v
i
tar
using
the path generation strategy, and moves to it along the
path. When i arrives at v
i
tar
, it determines the next
target node and thereafter repeats the cycle of path
generation and movement described above. How-
ever, i returns to the charging base when its remain-
ing battery capacity is low. Agent i uses the AMTDS
(Yoneda et al., 2015) to select its TDS. AMTDS is
a meta-strategic method for selecting an appropriate
TDS from a set of basic TDSs by Q-learning based on
EL
i
t
(v) and the expected rewards based on the number
of events executed per time step . In the experiments
below, the TDSs are the four simple basic strategies
of random selection, probabilistic greedy selection,
prioritization of unvisited interval sections, and bal-
anced neighbor-preferential selection.
After the next target node v
i
tar
is determined, the
agent uses gradual path generation (GPG) (Yoneda
et al., 2015) to generate a path. i generates the short-
est path to v
i
tar
using a simple path-finding algorithm
(such as A*-search). If there is a node that has a high
value of EL
i
t
(v) in the vicinity of the generated short-
est path, i adds a detour to that node to the path. The
details of the four TDSs, the GPG, and the method of
returning to the charging base are beyond the scope
of this paper; please refer to (Yoneda et al., 2015) for
more details.
3.3 Learning and Exchange of
Importance Values of Nodes
The importance values of the nodes and the negotia-
tion to delegate tasks/nodes, which were introduced in
AMTDS/EDC (Sugiyama et al., 2019), are the central
concepts in our proposed method. The importance
value of node ∀v is initialized as p
i
(v) = 0. When
agent i executes the task in node v at time t, p
i
(v) is
updated regardless of the number of events accumu-
lated in v as
p
i
(v) = (1− α)p
i
(v) + α
1
t − t
v
vis
,
where α (0 < α ≤ 1) is the learning rate for the im-
portance value.
To further promote load balancing and coordi-
nation between the agents and increase robustness
against environmental changes, the agents exchange
importance values through negotiation among them-
selves. This means that i delegates to or is dele-
gated to by other agents so that the agents in the sys-
tem can patrol intensively. When m(v
i
,v
j
) < d
co
for
i, j ∈ A, where the parameter d
co
(> 0) specifies the
communication range between the agents, i and j are
in communication range and can negotiate with each
other. Moreover, to suppress excessive communica-
tion, we introduce the minimum communication in-
terval B(> 0) between i and j, that is, i and j store
the last time they negotiated with each other, T
i, j
lst
, and
do not negotiate with each other until T
i, j
lst
+ B.
Agent i has its responsible node set V
i
R
⊂ V, which
is the set of N
i
R
(> 0) nodes with the highest impor-
tance values. The initial values are set to V
i
R
= V
and N
i
R
= |V|. V
i
R
and N
i
R
are updated when i re-
turns to the charging base. The agents use two types
of negotiation (negotiation for balancing task work-
loads and negotiation for exchanging responsibility)
between themselves to update p
i
(v), V
i
R
, and N
i
R
. For
more details on the two types of negotiations and
how p
i
(v), V
i
R
, and N
i
R
are updated, please refer to
(Sugiyama et al., 2019).
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
86

3.4 Evaluation Metrics
We evaluate the system using two types of metrics de-
pending on the expected applications. The first is the
total number of time steps in which the events are left
unprocessed. For example, in a cleaning or egg col-
lection application, the number of unprocessed events
(pieces of dirt not sucked up by the vacuum cleaner or
uncollected eggs) remaining in the environment and
the amount of time they are left unprocessed should
be minimized. D
t
s
,t
e
between time t
s
and t
e
(t
s
< t
e
) is
defined as
D
t
s
,t
e
=
∑
v∈V
t
e
∑
t=t
s
+1
L
t
(v).
A smaller value of D
t
s
,t
e
indicates a more efficient pa-
trol.
The second metric is the maximum number of un-
processed events for all the nodes. For example, in
a timed security patrol, no single point should be left
unmonitored. Therefore, all agents must maintain the
maximum number of unprocessed events (i.e., time
left unmonitored) across all nodes so that the pre-
defined alert level is not exceeded . This metric U
t
s
,t
e
between time t
s
and t
e
(t
s
< t
e
) is defined as
U
t
s
,t
e
= max
v∈V,t
s
≤t≤t
e
L
t
(v).
A smaller value of U
t
s
,t
e
also indicates a more efficient
patrol. Hereafter, for the sake of simplicity, D
t
s
,t
e
and
U
t
s
,t
e
are denoted as D(s) and U(s), respectively, and
t
s
and t
e
are omitted if their values are obvious. Our
goal is to maintain D(s) and U(s) low even when a
number of agents are stopped for scheduled suspen-
sions.
4 PROPOSED METHOD
In this study, we propose an extension of AMTDS/TH
(Tsuiki et al., 2021) called AMTDS with task han-
dover for scheduled suspension based on the esti-
mated chance of encounters (AMTDS/THE) to re-
duce performance degradation during the periods of
task handover and planned suspension. Specifically,
because agents can only negotiate between them-
selves when they encounter each other, that is, when
their distance is shorter than d
co
, the agents memorize
the number of times that they have negotiated from
the (re)start time. The agents that are scheduling their
planned suspension estimate the number of possible
negotiation opportunities until the suspension using
these data and determine the number of nodes that
should be delegated to other agents during the tran-
sition period. This reduces the efficiency loss not
only during the planned suspension but also during
the transition period before the planned suspension.
4.1 Estimation of Encounters until
Planned Suspension
To estimate the number of possible negotiations until
the planned suspension time, agent i counts the num-
ber of encounters for negotiation N
i
en
(t) between the
current time t and the most recent start time or re-
turn time from inspection. Note that the agents do
not negotiate with one another until B time steps have
passed since the last negotiation. The agents also do
not consider the content or quantity of the negotiation
or the agents that they have negotiated with.
The next planned suspension S for periodic in-
spection or replacement is given in advance as a tuple
S = (A
S
, T
sp
, T
rs
, D
tp
), where A
S
(⊂ A) is the set of
agents that will be suspended from the start time of
the suspension T
sp
to the return time from the suspen-
sion T
rs
. Parameter D
tp
is the length of the transition
period; thus, the scheduled suspension is announced
to all agents at T
sp
− D
tp
. When S is announced at t,
agent i estimates the number of opportunities for ne-
gotiation N
i
ng
(t) until T
sp
as
N
i
ng
(t) = N
i
en
(t) ×
T
sp
− t
t − T
st
×
|A
S
|
|A| − 1
,
where T
st
is the time at which i initializes N
i
en
(t) and
starts to count it. Therefore, T
sp
−t is the time remain-
ing until the planned suspension is reached. Note that
N
i
ng
(t) is an estimated value and therefore usually dif-
fers from those of other agents which may be working
in different areas.
4.2 Negotiation for Handover during
Transition Period
When both agents i and j are in A
S
or in A \ A
S
,
they negotiate with each other by using the negotia-
tion protocol proposed in (Sugiyama et al., 2019) to
enhance workload balance and activity coordination
among agents. Otherwise, when i ∈ A
S
and j ∈ A\A
S
,
they perform a negotiation for unidirectional task del-
egation to increase the number of nodes that j is re-
sponsible for by transferring some of the importance
values from i to j. This implies that i indirectly dele-
gates some tasks in its important nodes to j.
First, agent i ∈ A
S
selects the top e
i
g
(> 0) nodes
with the highest importance values from V
i
R
. Then,
the selected nodes are transferred from i to j at a
fixed ratio of p
i
(v). The importance values of the se-
Task Handover Negotiation Protocol for Planned Suspension based on Estimated Chances of Negotiations in Multi-agent Patrolling
87
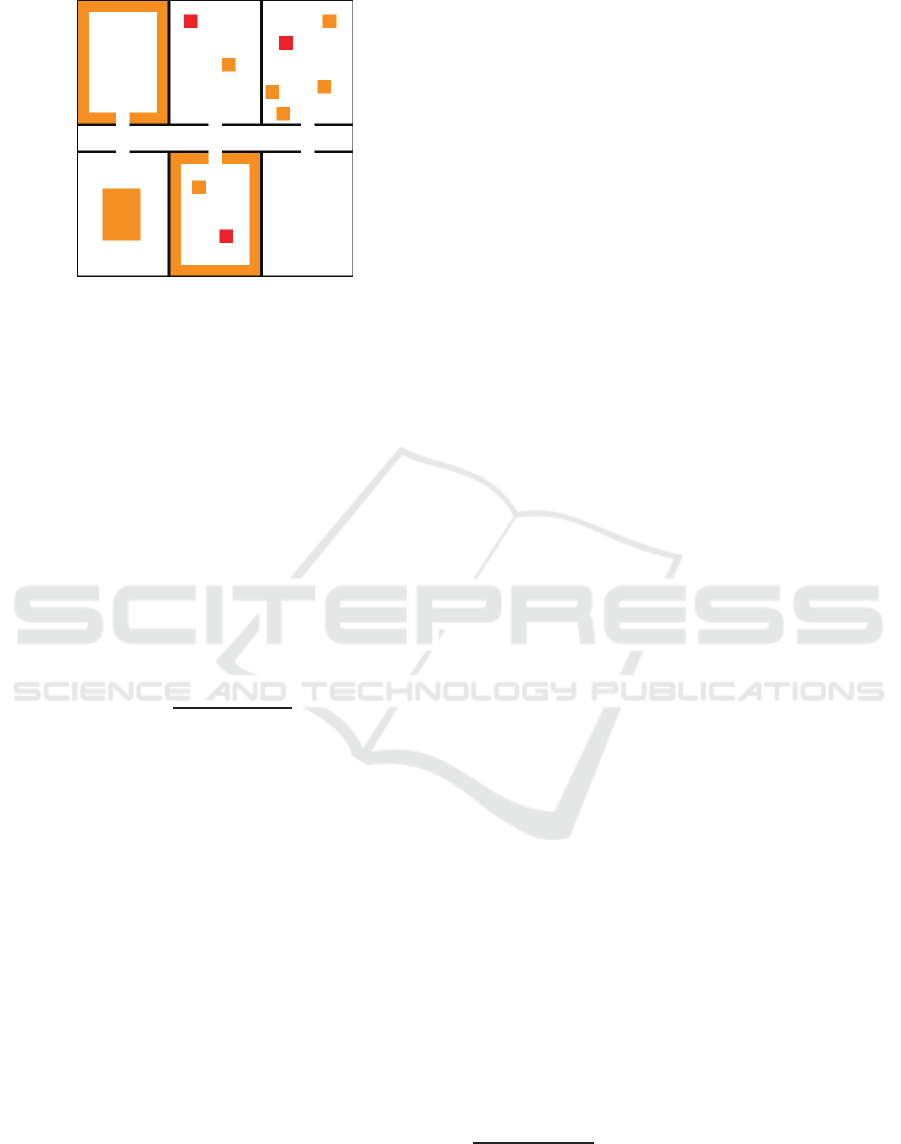
Figure 1: Experimental environment.
lected nodes for i and j are updated using the follow-
ing equations:
p
j
(v) ← p
j
(v) + p
i
(v) × δ
c
p
i
(v) ← p
i
(v) × (1− δ
c
),
where δ
c
(0 < δ
c
< 1) is the ratio of importance value
passed. This means that agent i does not completely
forget the delegated nodes, but rather induces j to ex-
pand its work scope. Thus, j may not visit these nodes
frequently, and i will also visit the nodes that it has
delegated.
The number of nodes e
i
g
that agent i transfers to
another agent is determined using N
i
ng
(t) by the fol-
lowing formula:
e
i
g
=
$
N
i
R
max(1, N
i
ng
(t))
%
, (1)
where N
i
R
> 0 is the upper limit of the nodes to be
delegated and is updated in both i and j as
N
i
R
← N
i
R
− e
g
N
j
R
← min(|V|, N
j
R
+ e
g
).
The max in the denominator in Eq. (1) prevents divi-
sion by zero. Note that after the importance values are
updated, the sets of responsible nodes, V
i
R
and V
j
R
, are
updated when i and j return to their charging bases.
5 EXPERIMENTS
5.1 Experimental Setting
We conducted experiments to compare the pro-
posed AMTDS/THE method with the conventional
AMTDS/EDC and AMTDS/TH methods to demon-
strate that AMTDS/THE can mitigate performance
degradation both due to the task handover from the
suspended agents during the transition period and due
to the suspension of the agents for inspection. In this
experiment, we used D(s) for the cleaning applica-
tion and U(s) for the timed security patrol applica-
tion and introduced different lengths of the transition
period leading up to the suspension to show that the
proposed method is effective in various applications
of the MACPP.
To allow for a simple comparison with conven-
tional methods, the experimental environment was
the same as that used in (Sugiyama et al., 2019) and
(Tsuiki et al., 2021). This environment G = (V, E) is a
two-dimensional 101× 101 grid structure comprising
six rooms and a central corridor, as shown in Fig. 1.
The node v ∈ V is located on the coordinates (x
v
,y
v
),
where −50 ≤ x
v
,y
v
≤ 50. The black lines indicate the
walls. For node ∀v ∈ V in the environment, the event
occurrence probability of node p(v) in Fig. 1 is set as
follows:
p(v) =
10
−3
(if v is in a red region)
10
−4
(if v is in an orange region)
10
−6
(otherwise, i.e., in a while region)
based on the colors of the nodes. Events are more
likely to occur in the nodes with deeper colors.
The number of agents is 20 (|A| = 20), and the
charging base v
i
base
of all the agents is placed at (0,0),
the center of the environment. It is also possible to
place a charging base at a different location for each
agent. Agent i leaves v
i
base
when its battery is full, pa-
trols the environment according to its own strategy,
and returns to v
i
base
before its battery level reaches
zero. The agents perform this action cycle repeat-
edly. We set the battery capacity of each agent to 900,
and assume that the battery decreases by one per time
step. Therefore, the battery is exhausted in 900 time
steps. The time required to increase the charge in the
battery by one unit is 3 time steps. This means that it
takes 2700 time steps for the battery capacity to reach
full capacity from a totally discharged state. For this
reason, we set the data collection interval t
e
− t
s
for
the evaluation indices D(s) and U(s) to 3600, because
the maximum number of time steps in the charge and
movement cycle is 3600. The values for the battery
were set with reference to an actual cleaning robot.
1
The length of each experimental run was set to
3,500,000 time steps. The experimental results shown
below are the average values of 20 runs. A set com-
prising half of the agents from A was randomly se-
lected in each trial and denoted as A
1
. We define
1
It was assumed that one time step corresponds to ap-
proximately 4 seconds, the moving speed is approximately
0.25 m/s, the maximum continuous operational time is ap-
proximately 1 hour, and the maximum charging time is ap-
proximately 3 hours.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
88
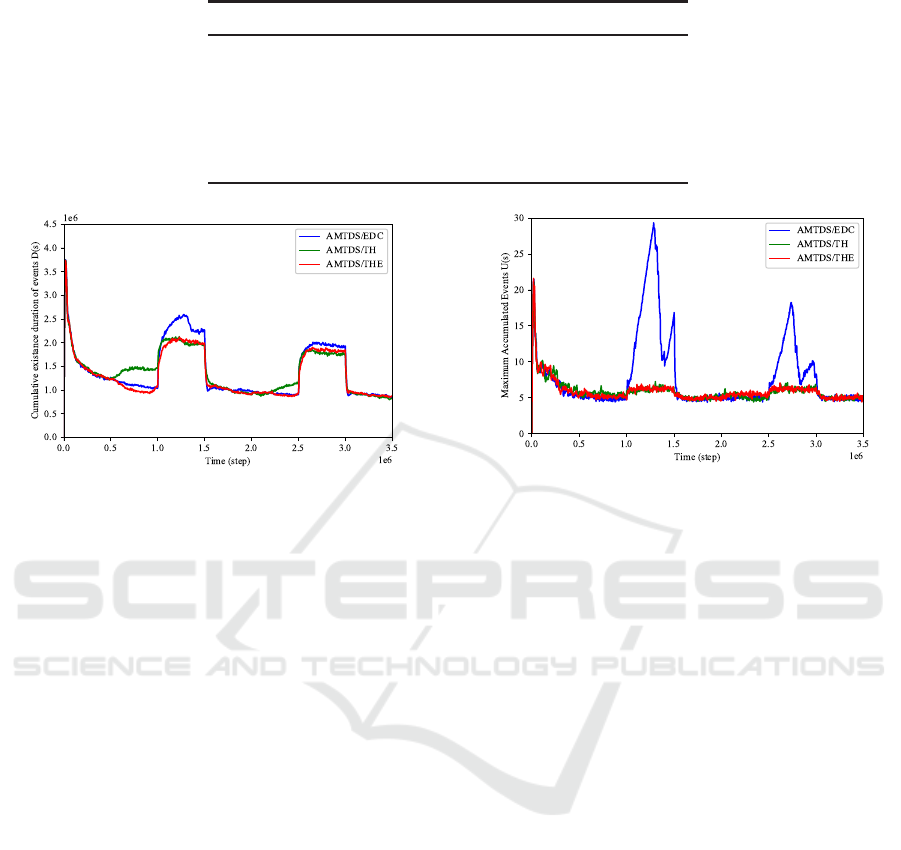
Table 1: Experimental parameters.
Description Parameter Value
Number of agents |A| 20
Communication range d
co
5
Minimum communication interval B 10800
Ratio of importance values passed δ
c
0.5
Data collection interval t
e
− t
s
3600
Learning rate for importance value α 0.1
Figure 2: Variation of D(s) over time.
A
2
= A\ A
1
. We set two planned suspensions, S
1
and
S
2
, in each run by assuming that the next inspections
are scheduled for a few days or weeks and performed
two experiments with different suspension schedules.
Recall that the planned suspension is represented by
(A
S
, T
sp
, T
rs
, D
tp
). In Experiment 1 (Exp. 1), the
planned suspensions are represented as
S
1
= (A
1
, 1, 000, 000, 1, 500, 000, 500, 000),
S
2
= (A
2
, 2, 500, 000, 3, 000, 000, 500, 000),
and in Experiment 2 (Exp. 2) as
S
1
= (A
1
, 1, 000, 000, 1, 500, 000, D
tp
),
S
2
= (A
2
, 2, 500, 000, 3, 000, 000, D
tp
),
where we set D
tp
= 100, 000 and 20, 000. As men-
tioned above, 3600 time steps correspond to approx-
imately four hours in our simulated environment;
therefore, the transition periods of D
tp
= 500, 000,
100, 000, and 20, 000 correspond to approximately
three weeks, 4.5 days, and one day, respectively. The
number of agents to be suspended in each planned
suspension was 10, which is half of the total num-
ber of agents. Although it is unlikely that half of the
agents will be stopped in actual operations, the exper-
iments were performed with extreme settings to con-
firm the effectiveness of the proposed method.
5.2 Performance Comparison
We plot the results for the evaluation metric D(s)
for the cleaning-type application and U(s) for the se-
Figure 3: Variation of U(s) over time.
curity patrol for the proposed AMTDS/THE method
and the conventional AMTDS/EDC and AMTDS/TH
methods in Fig. 2 and Fig. 3. The following two ob-
servations can be made from the figures:
First, compared to the conventional AMTDS/EDC
method, in which task delegation is not performed
before the planned suspension, the large perfor-
mance degradation during the planned suspension,
especially the sharp and significant deterioration of
U(s), are reduced in the proposed AMTDS/THE
and AMTDS/TH methods. Comparing between
AMTDS/THE and AMTDS/EDC, the peak value of
U(s) in AMTDS/THE was reduced by approximately
76.5% compared to AMTDS/EDC during the first
planned suspension and by approximately 61.4% dur-
ing the second suspension. For the cleaning prob-
lem, the sum of D(s) was improved by approximately
14.3% for the first suspension and by approximately
5.68% for the second. Note that there was no sig-
nificant difference in performance degradation during
the planned suspension between AMTDS/THE and
AMTDS/TH, as shown in Figs. 2 and 3, respectively.
This is because agents scheduled for planned suspen-
sion could effectivelydelegate a portion of their nodes
to agents not scheduled for the next planned suspen-
sion; thus, they continued to cover the entire area,
which prevented a large performance deterioration.
Second, these figures also show that the perfor-
mance degradation during the transition period until
the planned suspension was significantly reduced in
Task Handover Negotiation Protocol for Planned Suspension based on Estimated Chances of Negotiations in Multi-agent Patrolling
89
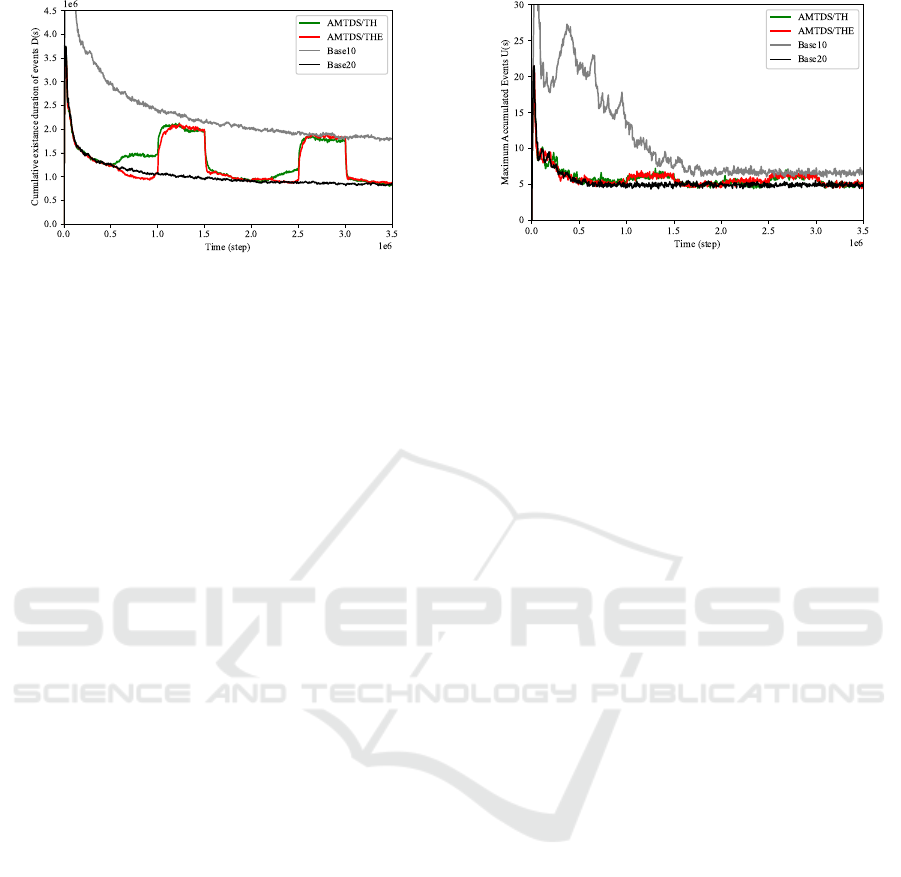
Figure 4: Performance comparison (D(s)).
AMTDS/THE compared to AMTDS/TH, especially
for D(s), although AMTDS/TH also delegated nodes
during the transition period. A detailed numerical
analysis showed that AMTDS/THE reduced the to-
tal D(s) during the transition period by approximately
26.0% for the first transition period and by approxi-
mately 9.00% for the second transition period com-
pared to AMTDS/TH. Comparing the performance
of AMTDS/TH and AMTDS/EDC, the efficiency im-
provement during the planned suspension obtained
with AMTDS/TH was offset by the efficiency loss
during the transition period. Meanwhile, there was
no significant difference in U(s) during the transition
period between AMTDS/THE and AMTDS/TH, and
neither method caused a significant decrease in effi-
ciency.
In general, the workload of the agents during the
transition period is likely to become unbalanced and
result in degraded performance because of task han-
dover for delegation. In AMTDS/THE, this negative
effect was prevented because the important nodes that
were deemed necessary to be always covered were
gradually and evenlyhanded overusing the accurately
estimated number of negotiation opportunities until
the beginning of the suspension period. In contrast,
because the number of negotiation opportunities were
not accurately estimated in AMTDS/TH, a large num-
ber of nodes were delegated at an early stage. There-
fore, the agents that were delegated many nodes could
not process all of them . This caused the efficiency to
be degraded before the suspension.
5.3 Performance Analysis
Although the sudden loss of efficiency due to the
planned suspension was found to be mitigated in
AMTDS/THE, we would like to verify whether the
resulting efficiency was adequate. Because there were
only 10 running agents during the planned suspen-
sion period, we compared the efficiency with that of
the case in which the MACPP instances were ex-
Figure 5: Performance comparison (U(s)).
ecuted with 10 agents from the beginning without
planned suspensions. We also examined the effi-
ciency when all 20 agents were running at all times
with no planned suspension. The results are shown
in Figs. 4 and 5. Note that the labels “Base10” and
“Base20” in these figures represent the results for the
cases of 10 agents and 20 agents, respectively.
These figures show some interesting results. First,
in the performance results during the two planned sus-
pensions, both of the metrics, D(s) and U(s), were as
low as or lower than the case of 10 agents with no
planned suspensions at all (i.e., “Base10”). This in-
dicates that the proposed method not only mitigated
performance degradation during the planned suspen-
sions, but prevented it completely. Second, the values
of D(s) and U(s) were greatly improved compared to
the Base10 case when AMTDS/THE or AMTDS/TH
was adopted, especially during the first planned sus-
pension period. This may be because it took more
time for the agents to learn, especially forU(s), when
there were only 10 agents compared to when there
were 20 agents, because there were fewer opportuni-
ties for interactions between the agents for learning.
Hence, the learning stabilized faster when the number
of agents was 20. It is therefore better to run a large
number of agents (e.g., 20) in the earlier stages and
then to reduce the number of agents using the pro-
posed method to speed up the learning convergence,
even when the final number of agents is 10.
Furthermore, the metric D(s) during the transition
period of the first planned suspension (Fig. 4) indi-
cates that AMTDS/THE exhibited better efficiency
than the case in which 20 agents worked constantly
(“Base20”). We can see from the curve for Base20 in
Fig. 4 that the learning had not yet converged, even
during the transition period of the first planned sus-
pension. We believe that the joint work at the impor-
tant nodes was increased through information sharing
in the proposed AMTDS/THE when the agents in-
formed other agents of the important nodes they had
learned so far, albeit unilaterally.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
90
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
Time (step)
×10
6
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
Events That Are Left Neglected D(s)
×10
6
AMTDS/THE (D
tp
= 20000)
AMTDS/THE (D
tp
= 100000)
AMTDS/THE (D
tp
= 500000)
Figure 6: D(s) at different transition periods (D
tp
).
5.4 Effect of Transition Period Length
In Exp. 2, we verified whether AMTDS/THE was
effective even when the transition period until the
next planned suspension was shortened by setting
D
tp
= 100, 000 or 20, 000. Because we set B =
10800, the number of opportunities for negotiations
between each pair of agents was at most 8–10 when
D
tp
= 100, 000 and 1-3 when D
tp
= 20, 000; how-
ever, considering the contingency of encounters, the
actual opportunities for negotiation were lower than
these numbers. The results for D(s) obtained using
AMTDS/THE are plotted in Fig. 6, along with the re-
sults when D
tp
= 500, 000 in Exp. 1. Note that we do
not show the results for U(s) because the results were
the same as those when D
tp
= 500, 000.
Figure 6 indicates that even when the transition
periods were shortened to D
tp
= 100, 000 and 20, 000
time steps, the performance degradation during the
transition period and the planned suspension was
still reduced in AMTDS/THE. Although there was a
very slight decrease in efficiency (i.e., D(s) has in-
creased) during the suspension period, the decrease
was negligible. Meanwhile, when the transition pe-
riod was 500,000, the learning was accelerated in
AMTDS/THE, but D
tp
= 100, 000 and 20, 000 were
too short to positively affect the learning efficiency.
If B is set to a smaller value, the agents will have
more opportunities for negotiation, and the learning
efficiency will be improved even if the transition pe-
riod is short. However, this involves a trade-off in that
it also increases unnecessary communication. This is-
sue will be the subject of future research.
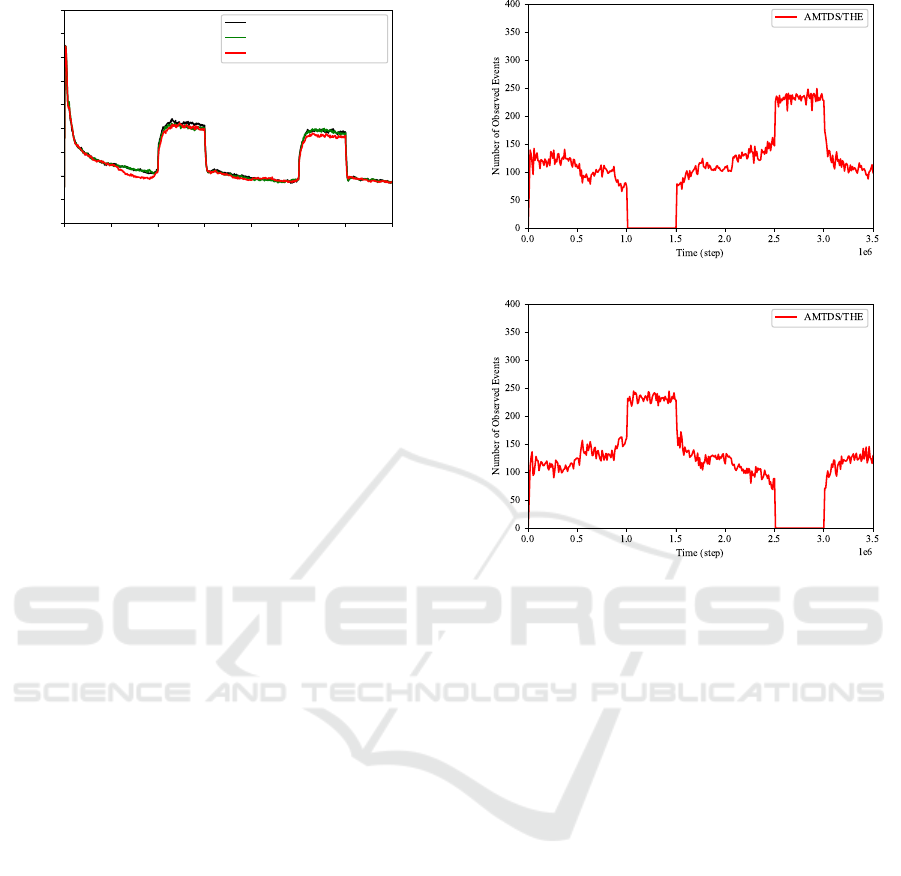
5.5 Discussion
To determine if the nodes were actually delegated, we
investigated the number of events that were processed
by agents in A
1
and A
2
over time. The results for
a randomly selected experimental run of Exp. 1 are
(a) Agents in A
1
(b) Agents in A
2
Figure 7: Number of events observed by agents.
plotted in Fig. 7). Note that the agents in A
1
stopped
during the first suspension period (Fig. 7a), and the
agents in A
2
stopped in the second one (Fig. 7b).
The figure indicates that, even during the transition
period, agents that were going to be suspended in
the next suspension period processed a considerable
number of events, although their workload gradu-
ally decreased. Immediately after they stopped, the
events to be processed were quickly transferred to
other agents. We can also see that the agents that re-
turned from suspension quickly increased the amount
of task processed by using the learning results before
the suspension, and at the same time, the agents that
have not been suspended reduced their workload.
As mentioned before, we believe that this was
made possible by the sharing of important nodes with
other agents through the proposed negotiation method
in which the agents did not transfer the nodes with
events for processing directly but only transferred the
ratio δ
c
of their importance values. We set δ
c
= 0.5 in
our experiments. If agent i directly transfers the loca-
tions, the agent j that is receiving them may already
be overloaded or some of the received locations may
be far from the area usually covered by j; hence, it
is often not easy for j to complement i for such dele-
gated nodes.
Task Handover Negotiation Protocol for Planned Suspension based on Estimated Chances of Negotiations in Multi-agent Patrolling
91

Table 2: Ratio of difference between the actual and esti-
mated number of negotiations (%).
Method Mean Max Min
AMTDS/TH 91.6 92.0 91.2
AMTDS/THE 7.7 15.2 1.7
In contrast, because δ
c
= 0.5, agent i did not com-
pletely forget the locations it has delegated but revis-
ited them at certain intervals, albeit at a lower fre-
quency in AMTDS/THE. If a large number of events
remained, i would then understand that the delegated
agent j was in a situation in which it could not work
adequately; therefore, i increased its importance value
again. These nodes were then delegated by i to other
agents during subsequent negotiations. Through the
repeated occurrence of this process, the overloaded
conditions were reduced and inappropriate delega-
tions remedied. This led to an improvement in effi-
ciency before the planned suspension.
Finally, we investigated whether the agents in
AMTDS/THE could estimate the number of future
negotiation opportunities until the next suspension pe-
riod. We calculated the ratio of the difference be-
tween the estimated and actual numbers of negotia-
tion opportunities in AMTDS/TH and AMTDS/THE.
The mean maximum and minimum ratios of the dif-
ferences are listed in Table 2. The results show that
the agents in AMTDS/THE could estimate the num-
ber of negotiation opportunities accurately, but the
agents in AMTDS/TH could not and underestimated.
In general, it is not easy to estimate the number of
future negotiation opportunities owing to contingen-
cies. The number of future negotiation opportunities
is also affected by the value of B, which may pre-
vent agents from negotiating with one another. Thus,
it seems that AMTDS/TH was designed to promote
active node delegation by estimating a smaller num-
ber of opportunities for negotiation. However, this
resulted in considerable performance degradation in
the transition period owing to some agents becoming
overloaded because of overly hasty delegation.
6 CONCLUSION
In this paper, we proposed a method called
AMTDS/THE to mitigate the temporary but rapid per-
formance degradation caused by planned suspension
in the MACPP. In AMTDS/THE, the agents to be sus-
pended delegate an important part of their tasks/nodes
to other agents during the transition period to pre-
pare for suspension and prevent performance degra-
dation during the planned suspension period, espe-
cially in the security patrol problem. Furthermore,
AMTDS/THE can also prevent performance degrada-
tion during the transition period. This improvement
is attributed to the introduction of a mechanism for
agents to accurately estimate the number of remain-
ing opportunities for negotiation with other agents un-
til the next planned suspension. The mechanism also
enables agents to decide on the number of nodes to be
delegated based on the number of estimated opportu-
nities.
In actual applications, it is necessary to shorten the
transition period before the planned suspension. For
this reason, we would like to improve the method so
that the agents can autonomously decide the timing of
the planned suspension.
ACKNOWLEDGEMENTS
This work was partly supported by JSPS KAKENHI
Grant Numbers 17KT0044 and 20H04245.
REFERENCES
Ahmadi, M. and Stone, P. (2006). A multi-robot system for
continuous area sweeping tasks. In Proceedings 2006
IEEE International Conference on Robotics and Au-
tomation, 2006. ICRA 2006., pages 1724–1729. IEEE.
Altshuler, Y., Yanovski, V., Wagner, I. A., and Bruckstein,
A. M. (2011). Multi-agent cooperative cleaning of
expanding domains. The International Journal of
Robotics Research, 30(8):1037–1071.
Chen, S., Wu, F., Shen, L., Chen, J., and Ramchurn, S. D.
(2015). Multi-agent patrolling under uncertainty and
threats. PLOS ONE, 10(6):1–19.
Elmaliach, Y., Agmon, N., and Kaminka, G. A. (2007).
Multi-robot area patrol under frequency constraints.
In Proceedings 2007 IEEE International Conference
on Robotics and Automation, pages 385–390.
Elor, Y. and Bruckstein, A. M. (2009). Multi-a(ge)nt graph
patrolling and partitioning. In 2009 IEEE/WIC/ACM
International Joint Conference on Web Intelligence
and Intelligent Agent Technology, volume 2, pages
52–57.
Gavranis, A. and Kozanidis, G. (2015). An exact solu-
tion algorithm for maximizing the fleet availability of
a unit of aircraft subject to flight and maintenance
requirements. European Journal of Operational Re-
search, 242(2):631–643.
Ghita, B., Agn`es, L., and Xavier, D. (2018). Scheduling
of production and maintenance activities using multi-
agent systems. In 2018 IEEE 23rd International Con-
ference on Emerging Technologies and Factory Au-
tomation (ETFA), volume 1, pages 508–515. IEEE.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
92

Kalra, N., Ferguson, D., and Stentz, A. (2005). Hoplites: A
market-based framework for planned tight coordina-
tion in multirobot teams. In Proceedings of the 2005
IEEE International Conference on Robotics and Au-
tomation, pages 1170–1177.
Kato, C. and Sugawara, T. (2013). Decentralized area par-
titioning for a cooperative cleaning task. In Boella,
G., Elkind, E., Savarimuthu, B. T. R., Dignum, F.,
and Purvis, M. K., editors, PRIMA 2013: Principles
and Practice of Multi-Agent Systems, pages 470–477,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Li, G., Chesser, G. D., Huang, Y., Zhao, Y., and Purswell,
J. L. (2021). Development and optimization of a deep-
learning-based egg-collecting robot. Transactions of
the American Society of Agricultural and Biological
Engineers, 64(5):1659–1669.
Moradi, H. and Shadrokh, S. (2019). A robust reliability-
based scheduling for the maintenance activities dur-
ing planned shutdown under uncertainty of activ-
ity duration. Computers & Chemical Engineering,
130:106562.
Othmani-Guibourg, M., El Fallah-Seghrouchni, A., and
Farges, J.-L. (2018). Path generation with LSTM re-
current neural networks in the context of the multi-
agent patrolling. In 2018 IEEE 30th International
Conference on Tools with Artificial Intelligence (IC-
TAI), pages 430–437.
Othmani-Guibourg, M., Fallah-Seghrouchni, A. E., Farges,
J.-L., and Potop-Butucaru, M. (2017). Multi-agent pa-
trolling in dynamic environments. In 2017 IEEE In-
ternational Conference on Agents (ICA), pages 72–77.
Panteleev, V., Kizim, A., Kamaev, V., and Shabalina, O.
(2014). Developing a model of multi-agent system of
a process of a tech inspection and equipment repair. In
Joint Conference on Knowledge-Based Software En-
gineering, pages 457–465. Springer.
Rezazadeh, N. and Kia, S. S. (2019). A sub-modular re-
ceding horizon approach to persistent monitoring for
a group of mobile agents over an urban area. IFAC-
PapersOnLine, 52(20):217–222. 8th IFAC Workshop
on Distributed Estimation and Control in Networked
Systems NECSYS 2019.
Sampaio, P. A., Ramalho, G., and Tedesco, P. (2010). The
gravitational strategy for the timed patrolling. In 2010
22nd IEEE International Conference on Tools with
Artificial Intelligence, volume 1, pages 113–120.
Seif, J. and Andrew, J. Y. (2018). An extensive operations
and maintenance planning problem with an efficient
solution method. Computers & Operations Research,
95:151–162.
Sugiyama, A., Sea, V., and Sugawara, T. (2019). Emer-
gence of divisional cooperation with negotiation and
re-learning and evaluation of flexibility in continuous
cooperative patrol problem. Knowledge and Informa-
tion Systems, 60(3):1587–1609.
Tsuiki, S., Yoneda, K., and Sugawara, T. (2021). Reduc-
ing efficiency degradation due to scheduled agent sus-
pensions by task handover in multi-agent cooperative
patrol problems. In The International FLAIRS Con-
ference Proceedings, volume 34.
Wagner, I. A., Altshuler, Y., Yanovski, V., and Bruckstein,
A. M. (2008). Cooperative cleaners: A study in ant
robotics. The International Journal of Robotics Re-
search, 27(1):127–151.
Xie, J., Zhou, R., Luo, J., Peng, Y., Liu, Y., Xie, S., and Pu,
H. (2020). Hybrid partition-based patrolling scheme
for maritime area patrol with multiple cooperative un-
manned surface vehicles. Journal of Marine Science
and Engineering, 8(11).
Yoneda, K., Sugiyama, A., Kato, C., and Sugawara, T.
(2015). Learning and relearning of target deci-
sion strategies in continuous coordinated cleaning
tasks with shallow coordination1. Web Intelligence,
13(4):279–294.
Zhou, X., Wang, W., Wang, T., Lei, Y., and Zhong, F.
(2019). Bayesian reinforcement learning for multi-
robot decentralized patrolling in uncertain environ-
ments. IEEE Transactions on Vehicular Technology,
68(12):11691–11703.
Zhou, X., Wang, W., Wang, T., Li, M., and Zhong, F.
(2020). Online planning for multiagent situational in-
formation gathering in the Markov environment. IEEE
Systems Journal, 14(2):1798–1809.
Task Handover Negotiation Protocol for Planned Suspension based on Estimated Chances of Negotiations in Multi-agent Patrolling
93
