
Towards a Floating Plastic Waste Early Warning System
G
´
abor Paller and G
´
abor
´
El
˝
o
Sz
´
echenyi Istv
´
an University, Information Society Research & Education Group, Egyetem t
´
er 1. Gy
˝
or, Hungary
Keywords:
Image Processing, Waste Detection, Machine Learning.
Abstract:
Plastic waste in living waters is a worldwide problem. One particular variant of this problem is floating plastic
waste, e.g. plastic bottles or bags. Rivers often carry large amount of floating plastic waste, due to unauthorized
or not properly maintained waste dumps installed in the rivers’ flood plain. It is of utmost importance that
environmental protection agencies be aware of such large-scale plastic pollutions so that they can initiate
appropriate countermeasures. This paper presents two iterations of an early warning system designed to alert
environmental protection agencies of plastic waste pollution. These systems are based on processing camera
images but while the first iteration uses motion detection for identifying relevant images, the second iteration
adopted a machine learning algorithm deployed in edge computing architecture. Better selectivity of the
machine learning-based solution significantly eases the burden on the operators of the early warning system.
1 INTRODUCTION
By quantity, plastic is the most important riverine pol-
lutant. Depending on the measurement source plastic
pollution is estimated to be between 50% and 70%
of the entire solid pollution material (Aytan et al.,
2020) (Castro-Jim
´
enez et al., 2019). The size of plas-
tic segments vary, from nano plastic (<0.1 µm) to
macroplastic (>5 cm) but eventually larger segments
break down to micro and nano plastics and enter the
food chain (van Emmerik and Schwarz, 2020). There-
fore it is advantageous to eliminate the plastic pollu-
tion while it still consists of larger segments.
Plastic pollution has many sources. (Lechner
et al., 2014) highlights micro- and mesoplastic de-
bris resulting from industrial plastic production. In
Eastern Hungary significant macroplastic pollution is
caused by improperly handled or outright illegal up-
stream waste dumps (Ljasuk, 2021). These waste
dumps cause large-scale macroplastic pollutions, usu-
ally when the river is flooding. Typical polluting
item is a plastic bottle. Figure 1 shows a plastic
bottle pollution case on the Szamos river, Hungary
which is probably a result of an improperly handled
waste dump. Enviromental protection agencies re-
act to large-scale pollution cases by mobilizing heavy
equipment, e.g. barges and excavators. This requires
preparation time, therefore a timely warning is very
important.
Plastic items can be detected in a number of ways
but the observation limitations quickly eliminate most
of them. The observation environment has the follow-
ing properties.
• Detection distance is relatively long. The rivers
where we want to perform the detection are quite
wide, 30-50 meters is not uncommon. Although
it would be definitely easier to mount the camera
downward-looking (van Lieshout et al., 2020), the
water surfaces to monitor do not permit that con-
figuration.
• Plastic items to be detected are covered with other
materials from the environment. There is almost
always a water film on them and other foreign ma-
terials (e.g. dirt or algae) are quite common.
These limitations make remote materials testing
methods largely unusable. Laser Induced Break-
down Spectroscopy or spectral imaging all require
illumination by a special light source (laser or in-
frared/ultraviolet light source) (Gundupalli et al.,
2017) which is very complicated given the significant
distance between the observation location and the tar-
get object. The water film and other materials cov-
ering the targets also make remote materials testing
unfeasible.
Considering these difficulties we chose observa-
tion in the visible light domain. This approach does
have its drawbacks too. The current implementation
works only in the daytime and observation in the night
is definitely a requirement. This requirement can be
implemented with a strong infrared searchlight but it
is not in the content of our current research.
Paller, G. and Él
˝
o, G.
Towards a Floating Plastic Waste Early Warning System.
DOI: 10.5220/0010894500003118
In Proceedings of the 11th International Conference on Sensor Networks (SENSORNETS 2022), pages 45-50
ISBN: 978-989-758-551-7; ISSN: 2184-4380
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
45

Figure 1: Macroplastic pollution consisting mostly of plastic bottles, Szamos river, Olcsva, Hungary, 2020 June.
2 EARLY WARNING SYSTEM
ITERATIONS
2.1 First Iteration: Motion Detection
Security cameras almost always have a feature that
detects moving objects in the input image stream. The
mechanism is simple. The camera compares the ac-
tual image to the previous image (or a limited set
of previous images) and calculates the differing pix-
els between the actual and previous image(s). If the
amount of differing pixels is too high, relevant move-
ment event is triggered and based on the configuration
of the camera the image and the difference mask are
saved.
Off-the-shelf security cameras have limited con-
figuration options with regards to motion detection
parameters so we built our own motion detection cam-
era and its server backend. It was clear from the be-
ginning that the system must operate in edge com-
puting architecture, i.e. the camera node has to have
built-in intelligence to select image candidates where
something relevant is happening as the data connec-
tion between the camera unit and its server backend
will not be able to transfer all the images taken. Com-
ponents of this system are the following.
• Camera unit based on a Raspberry Pi 3 Model B+
single board computer and its Raspberry Pi Cam-
era Module 2. The camera unit runs the motion
open-source software that implements the motion
detection algorithm and has many configuration
parameters to tune this algorithm. The camera
unit continuously runs the motion detection and in
case of a movement trigger it saves the actual im-
age and the difference mask to the local SD card.
The camera unit also maintains an SSH tunnel to
its camera server.
• Camera server is a web application implemented
in Spring/Java deployed into the Azure cloud. The
camera server regularly visits the camera units
and retrieves the images and the difference masks.
The camera server has a web interface that allows
authenticated users to browse images. Adminis-
trator users can also configure the motion detec-
tion parameters.
The camera unit was deployed in the harbour
of Bodrogkisfalud, Hungary and operated for 13
months. During this time the camera unit recorded
more than 440000 images. Most of these images
were not floating plastic waste but unrelated changes
in the input image, e.g. boat traffic of the harbour
or even the sun’s glitter on the river. When the cam-
era recorded relevant images, those images were re-
lated to larger islands of floating debris, sometimes
containing plastic waste. Figures 2 and 3 show such
a larger floating debris and the difference mask that
triggered the image capture. Green areas are masked
out from the motion detection.
After a lengthy configuration tuning process 4000
pixel threshold was chosen. This is the number of
pixels changed in the image that triggers a capture.
Considering the image size of 1024x640 pixels it is
clear that individual plastic waste items cannot be de-
tected, only if they form a larger block of debris. Even
with this quite high threshold the first iteration gener-
ates a large amount of irrelevant images because its
selectivity is low.
2.2 Second Iteration: Deep Learning
The first iteration failed in terms of selectivity as
it picked up a large number of images where noth-
ing relevant happened. In addition its sensitivity did
not satisfy the requirements either, because the pixel
threshold was too high to capture individual plastic
SENSORNETS 2022 - 11th International Conference on Sensor Networks
46

Figure 2: Floating island of debris.
Figure 3: Floating island of debris, mask image.
waste items and lowering the threshold would have
generated even more false alarms. As plastic waste is
often contaminated by e.g. dirt and comes in differ-
ent colors and shapes therefore we needed an image
recognition algorithm able to operate in such a noisy
environment. Deep neural networks (DNN) were ex-
pected to satisfy these requirements.
Applying DNN to recognize floating plastic waste
is not a new idea, (van Lieshout et al., 2020) also took
this approach. The camera setup and the classfication
requirements are different, however. Their system
uses a downward-looking camera which decreases the
distance to the target objects. This setup also results
in better resolution which lets them perform more de-
tailed classification (”plastic”/”not plastic”).
Our second iteration is still expected to cover as
large water surface as possible which means that tar-
get objects measuring 20-30 cm can be as far as 20-30
meters from the camera. Even if the distance can be
partially offset by optical zoom, targets will still look
small in the input image. For this reason we did not
expect any classification of the floating waste.
We experimented with the YOLOv3 (Redmon and
Farhadi, 2018) and Faster R-CNN (Ren et al., 2015)
deep neural networks. We could not achieve reliable
object detection with YOLOv3, imprecise localisa-
tion was experienced. This is in line with YOLOv3
authors’ own paper which notes that YOLOv3 strug-
gles to get the boxes perfectly aligned with the object.
In case of Faster R-CNN the challenge was that
our training machine had only 6GB of GPU memory
which is not sufficient to train with ResNet-101 back-
bone commonly used with Faster R-CNN, so we fell
back to ResNet-50-FPN model. The implementation
came from Torchvision, the model was pre-trained
on COCO train2017 dataset, the last 3 layers of the
backbone was allowed to train and we trained for 11
epochs. The threshold confidence level was set to a
relatively low value, 0.25. We expect that this low
level will generate some false positives but the low
quality of the target objects (due to the quite long dis-
tance) requires relatively lax recognition. The initial
training dataset had 195 images, was annotated with
the VGG Image Annotator tool
1
to determine the
bounding area of the relevant object and came from
the following sources.
• Live images of plastic waste floating on the river.
Some of the images were collected by camera
crews while others came from our own camera
from the first iteration. We did not have enough
high-quality images of this kind in our disposi-
tion therefore we needed to add additional images
from diverse sources.
• Plastic waste collected from the river and photoed
in front of neutral backgrounds. Figure 4 shows
such a training image with bounding area annota-
tion shown.
• Plastic waste images in natural settings (e.g.
seashores) collected from the internet.
The system’s architecture is constructed in such
a way that its user is expected to continuously collect
and annotate images, hence we expect the training im-
age set to grow.
The training image set was augmented by rotat-
ing the training images by 90, 180 and 270 degrees.
All the images were scaled so that their longer side
was 640 pixel. There is no scaling augmentation as
the model’s Feature Pyramid Network takes care of
scaling the training data during inference.
The result is demonstrated in Figure 5. The algo-
rithm cannot recognize every waste item but it recog-
nizes enough many so that the warning can be trig-
gered.
Further analysis was done on 5 video footages
(Table 1) taken in different circumstances about real
large scale plastic waste pollution. Each footage is
filmed in a river landscape environment and depicts
floating debris from larger distance (5-50 meters),
plastic and non-plastic at the same time. By viewing
the selected section of the video footage, we counted
the recognizable debris and compared it to the output
of the algorithm. The following categories were con-
sidered.
1
https://www.robots.ox.ac.uk/˜vgg/software/via/
Towards a Floating Plastic Waste Early Warning System
47
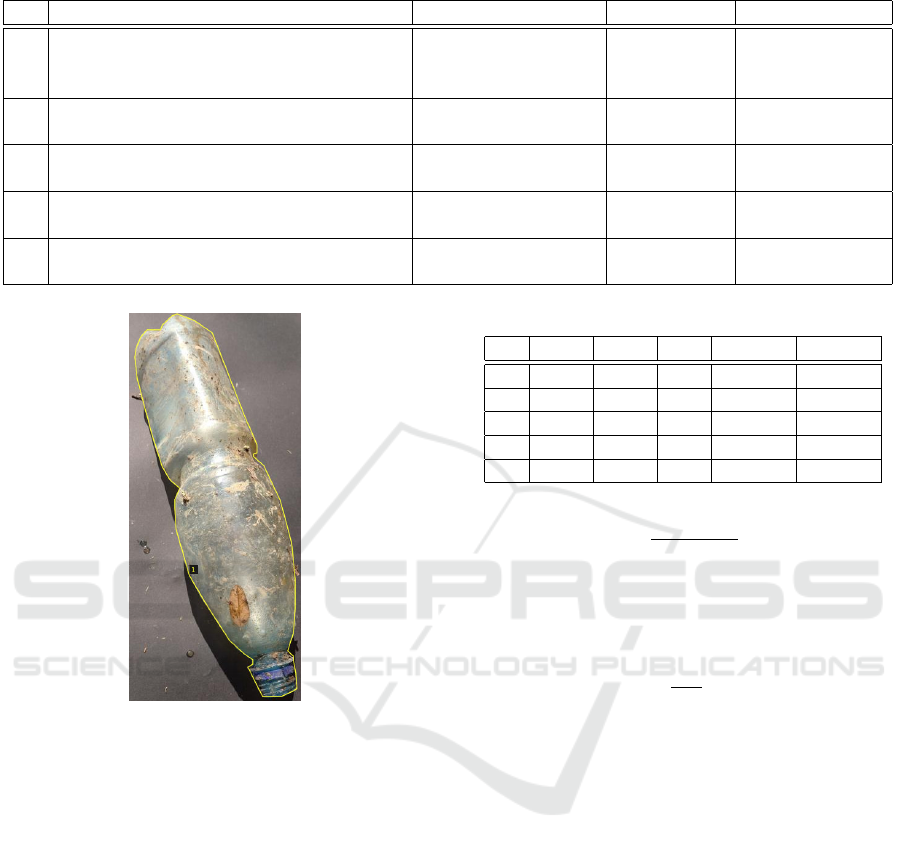
Table 1: Video footages analysed for detection efficiency.
ID Description Video recorder Distance Frames analysed
#1 Individual plastic waste (mostly bottles)
floating down the river bend
Professional camera
crew with optical
zoom
30-50 meters 300
#2 Mass of mixed floating waste (wood, plas-
tic) captured at a dam
Drone 5-15 meters 50
#3 Mass of mixed floating waste (wood, plas-
tic) captured at a dam
Drone 5-15 meters 30
#4 Mass of mixed floating waste (wood, plas-
tic) near to a river bank
Person filming from
a boat
5-15 meters 24
#5 River segment with floating non-plastic
waste
Drone 10-20 meters 60
Figure 4: Typical training image with bounding area anno-
tation shown.
Recognized. The human viewer considers the item
a plastic waste and the algorithm located it cor-
rectly.
Not Recognized. The human viewer considers the
item a plastic waste but the algorithm does not lo-
cate it correctly.
Miscategorized. The human viewer does not con-
sider the item a plastic waste but the algorithm
identifies it as such.
Note that due to the long distance and the quality
of the footages it is not always easy to decide even for
a human viewer if a certain piece of debris is e.g. a
plastic bottle or a wooden trunk. Also, in the mass
of floating debris it is not always possible to distin-
guish individual items. Therefore the counts can be
considered only approximations.
In addition, we calculated the following metrics.
Table 2: Results of the video footage analysis.
ID TR TNR TM NRT MR
#1 608 817 12 57.3% 1.97%
#2 1057 603 153 36.3% 14.47%
#3 309 129 31 29.4% 10.03%
#4 277 107 11 27.86% 3.97%
#5 0 0 0 N/A N/A
NRT =
T NR
T NR + T R
100% (1)
where T NR and T R are the sum of the recognized
and not recognized item counts in all the frames of the
analysed segment.
MR =
T M
T R
100%. (2)
where T M is the sum of all the miscategorized
items in all the frames of the analysed segment.
The results can be seen in Table 2. The results
demonstrate that the algorithm does not recognize a
large amount of relevant objects. In case of footage
#1, more than half of the items were not recognized.
The items that were recognized, however, are nu-
merous enough to trigger an alert therefore the early
warning system performs its intended function. The
large number of miscategorized items (up to 15%) is
also a concern. More detailed analysis reveals, how-
ever, that this is mostly due to the chaotic waste mass
where even human viewers have trouble distinguish-
ing and categorizing items. Footage #5 has no such
problem because no such mass of waste is present in
that footage. We therefore consider the DNN-based
image recognition algorithm a great leap toward more
reliable waste recognition and we expect that its per-
formance will improve as more training images accu-
mulate during field operation.
The early warning system’s architecture was up-
dated to accomodate the functions needed to operate
SENSORNETS 2022 - 11th International Conference on Sensor Networks
48
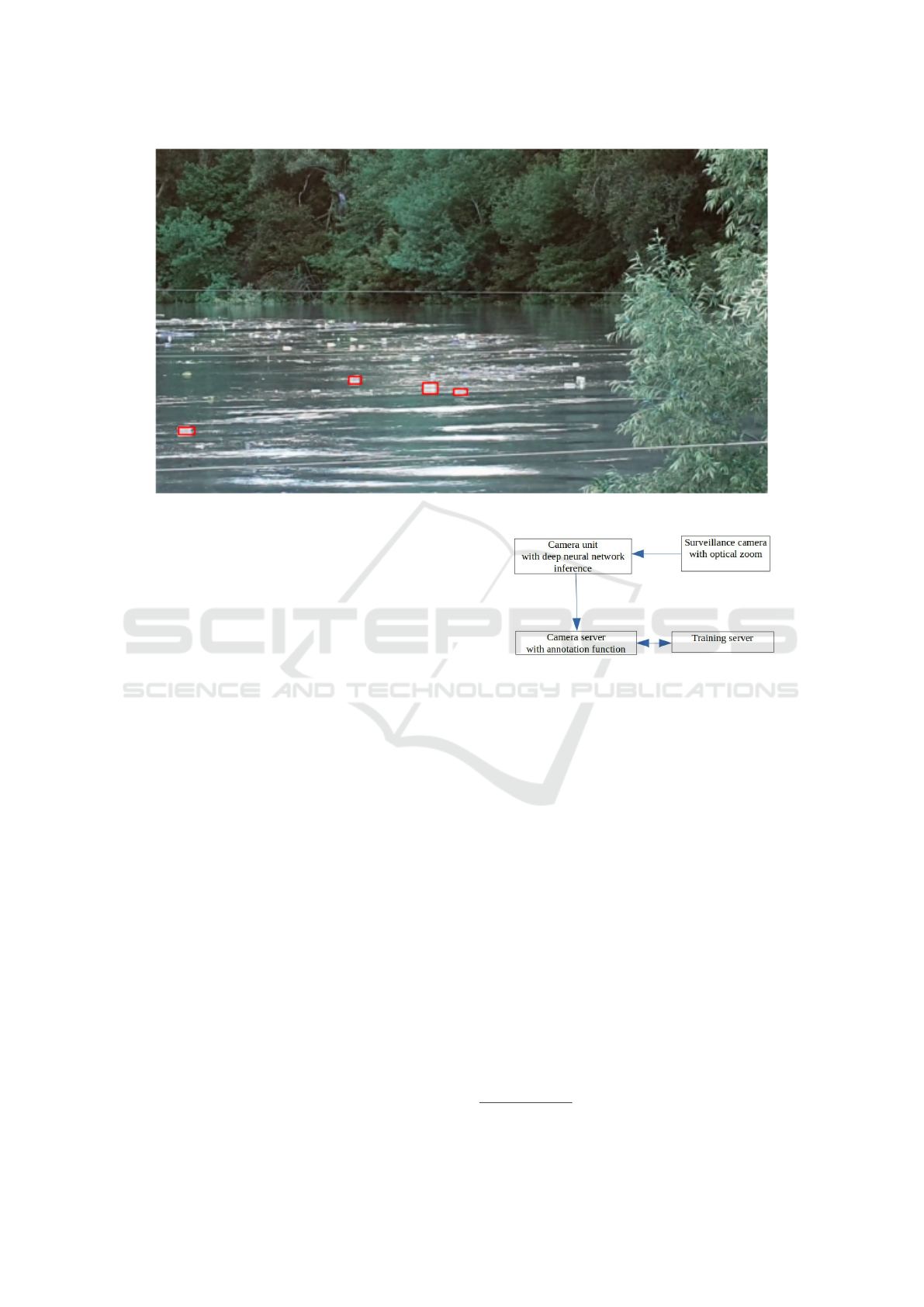
Figure 5: Detected waste in the Olcsva video footage.
the deep neural network (Figure 6). Compared to the
first iteration the changes are the following.
• Images are now taken by a professional surveil-
lance camera featuring optical zoom. This is nec-
essary to provide sufficiently detailed images so
that the DNN-based algorithm could pick individ-
ual plastic waste objects. A Foscam surveillance
camera with 18x optical zoom was employed.
• Camera unit is now responsible of running the
trained DNN in inference mode. This required
significant hardware update as the embedded
computer has to be equipped now with a reason-
ably powerful GPU. As the camera unit is an edge
node and runs only inference and not training, a
GPU with 2GB GPU memory is enough. This re-
quired however to swap the Raspberry Pi 3 with
an industrial PC equipped with NVIDIA GPU.
The surveillance camera and the camera server
are connected with ONVIF protocol which lets the
camera server rotate the camera so that the cam-
era’s view can scan the entire observation area.
• Camera server got additional functions related to
selecting and annotating images in which a rel-
evant object was not recognized, initiating train-
ing on the training server and updating the DNN
weight files on the camera units.
• Training server is a new component that is respon-
sible for running the DNN in training mode once
new annotated images are available. It is sepa-
rated from the camera server as training requires
relatively strong GPU (6GB GPU memory with
the current model).
Figure 6: Updated architecture of the second iteration.
3 CONCLUSIONS
We presented two iterations of a floating plastic waste
early warning system. The second iteration featuring
a DNN increased the selectivity of the system signif-
icantly generating much less false alarms. We were
not entirely satisified with the performance of the al-
gorithm as significant number of relevant items were
not recognized and miscategorized but we still con-
sider the second iteration a major leap forward. Due
to bandwidth limitations the system can only be de-
ployed in edge computing architectural style which
requires relatively powerful GPU in the camera unit
in case of the second iteration.
ACKNOWLEDGEMENTS
We thank the support of the PET Kupa initiative
2
which provided us with field experience, countless
2
https://petkupa.hu/
Towards a Floating Plastic Waste Early Warning System
49

images and items of floating plastic waste. We also
thank the Kal
´
oz Kik
¨
ot
˝
o in Bodrogkisfalud, Hungary
that provided space for us to mount our experimental
equipment.
REFERENCES
Aytan, U., Pogojeva, M., and Simeonova, A. (2020). Ma-
rine Litter in the Black Sea.
Castro-Jim
´
enez, J., Gonz
´
alez Fern
´
andez, D., Fornier, M.,
Schmidt, N., and Semp
´
er
´
e, R. (2019). Macro-litter in
surface waters from the Rhone River: Plastic pollution
and loading to the NW Mediterranean Sea. Marine
Pollution Bulletin, 146.
Gundupalli, S. P., Hait, S., and Thakur, A. (2017). A review
on automated sorting of source-separated municipal
solid waste for recycling. Waste Management, 60:56–
74. Special Thematic Issue: Urban Mining and Circu-
lar Economy.
Lechner, A., Keckeis, H., Lumesberger-Loisl, F., Zens, B.,
Krusch, R., Tritthart, M., Glas, M., and Schluder-
mann, E. (2014). The Danube so colourful: A pot-
pourri of plastic litter outnumbers fish larvae in Eu-
rope’s second largest river. Environmental Pollution,
188:177–181.
Ljasuk, D. (2021). In the name of the
Tisza - source to the Black Sea,
https://www.youtube.com/watch?v=TLyK aIu3fc.
Redmon, J. and Farhadi, A. (2018). YOLOv3: An incre-
mental improvement.
Ren, S., He, K., Girshick, R., and Sun, J. (2015). Faster
R-CNN: Towards real-time object detection with re-
gion proposal networks. In Cortes, C., Lawrence,
N., Lee, D., Sugiyama, M., and Garnett, R., editors,
Advances in Neural Information Processing Systems,
volume 28. Curran Associates, Inc.
van Emmerik, T. and Schwarz, A. (2020). Plastic debris in
rivers. WIREs Water, 7(1):e1398.
van Lieshout, C., van Oeveren, K., van Emmerik, T., and
Postma, E. (2020). Automated river plastic monitor-
ing using deep learning and cameras. Earth and Space
Science, 7(8):e2019EA000960.
SENSORNETS 2022 - 11th International Conference on Sensor Networks
50
