
LSU-DS: An Uruguayan Sign Language Public Dataset for Automatic
Recognition
Ariel E. Stassi
1
, Marcela Tancredi
2
, Roberto Aguirre
4
, Alvaro G
´
omez
6
, Bruno Carballido
3,4
,
Andr
´
es M
´
endez
3
, Sergio Beheregaray
5
, Alejandro Fojo
2
, V
´
ıctor Koleszar
3
and Gregory Randall
6
1
Centro Universitario Regional Litoral Norte, Universidad de la Rep
´
ublica, Paysand
´
u, Uruguay
2
Facultad de Humanidades y Ciencias de la Educaci
´
on, Universidad de la Rep
´
ublica, Uruguay
3
Centro Interdisciplinario en Cognici
´
on para la Ense
˜
nanza y el Aprendizaje, Universidad de la Rep
´
ublica, Uruguay
4
Centro de Investigaci
´
on B
´
asica en Psicolog
´
ıa, Facultad de Psicolog
´
ıa, Universidad de la Rep
´
ublica, Uruguay
5
Centro de Investigaci
´
on y Desarrollo para la Persona Sorda, Uruguay
6
Instituto de Ingenier
´
ıa El
´
ectrica, Facultad de Ingenier
´
ıa, Universidad de la Rep
´
ublica, Uruguay
Keywords:
Uruguayan Sign Language, Sign Language Recognition, Public Dataset.
Abstract:
The first Uruguayan Sign Language public dataset for automatic recognition (LSU-DS) is presented. The
dataset can be used both for linguistic studies and for automatic recognition at different levels: alphabet,
isolated signs, and sentences. LSU-DS consists of several repetitions of three linguistic tasks by 10 signers.
The registers were acquired in an indoor context and with controlled lighting. The signers were freely dressed
without gloves or specific markers for recognition. The recordings were acquired by 3 simultaneous cameras
calibrated for stereo vision. The dataset is openly available to the community and includes gloss information as
well as both the videos and the 3D models generated by OpenPose and MediaPipe for all acquired sequences.
1 INTRODUCTION
Sign languages are natural language systems which
employ the space as material substrate and the vi-
sual perception of a combination of manual and
non-manual parameters to convey meaning. Man-
ual parameters refer to handshape, place of articu-
lation, hand orientation and hand movement. Non
manual parameters refer to lip patterns, gaze, fa-
cial expressions, and head and body posture of the
signer (Von Agris et al., 2008a). The combination of
these attributes gives rise to the sign, a basic element
of this language. The association between the param-
eters of a sign and the meaning it carries is not univer-
sal, but specific to each language (e.g. American Sign
Language, ASL; Argentinan Sign Language, LSA, or
German Sign Language, DGS). The Uruguayan Sign
Language (LSU) is the one commonly used by the
deaf community in Uruguay.
With the advent of artificial intelligence, auto-
matic recognition of manual gestures has gained great
importance in the scientific community, with applica-
tions in various fields, including Automatic Sign Lan-
guage Recognition (ASLR). Strictly speaking, ASLR
must consider the dynamics of both manual and non-
manual activity, i.e., recognition of body and facial
activity. In addition to various technological appli-
cations, ASLR has allowed advances in the linguis-
tic study of sign languages (Trettenbrein et al., 2021).
Historically, ASLR was performed using different in-
put data sources –data gloves, images, depth maps–
and several approaches –combination of extracted
features and the classification stage– focused on the
classification in a subset of a particular sign language
at different levels (Von Agris et al., 2008b; Cooper
et al., 2011; Cheok et al., 2019). Recently, several ef-
forts have been made to solve ASLR using deep learn-
ing approaches, learning spatial and temporal features
from data and even employing weakly labeled learn-
ing techniques (Koller et al., 2016).
Naturally, ASLR requires a training stage, which
is only possible from a properly labeled dataset.
There are several datasets in the community avail-
able for ASLR research and development. Gener-
ally speaking, the available datasets can be classified
in static and dynamic. The former are composed of
still images or isolated data and are generally used for
handshape or fingerspelling recognition. Among the
Stassi, A., Tancredi, M., Aguirre, R., Gómez, A., Carballido, B., Méndez, A., Beheregaray, S., Fojo, A., Koleszar, V. and Randall, G.
LSU-DS: An Uruguayan Sign Language Public Dataset for Automatic Recognition.
DOI: 10.5220/0010894200003122
In Proceedings of the 11th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2022), pages 697-705
ISBN: 978-989-758-549-4; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
697

open access datasets, we can mention the ASL Finger
Spelling Dataset (Pugeault and Bowden, 2011), the
NUS hand posture datasets I (Kumar et al., 2010), and
II (Pisharady et al., 2013), LSA16 (Ronchetti et al.,
2016a) from Argentina and the RWTH-PHOENIX-
Weather MS Handshapes (Koller et al., 2016). On
the other hand, dynamic datasets are composed of
videos and are used for isolated sign recognition
or continuous sign language recognition, depending
on the linguistic content involved. Among these,
we can mention the RWTH German Fingerspelling
Database (Dreuw et al., 2006), SIGNUM (Von Agris
and Kraiss, 2007), and LSA64 (Ronchetti et al.,
2016b). For a review of sign language datasets please
visit http://facundoq.github.io/guides/sign language
datasets.
As for LSU, to the best of our knowledge, there
are two direct antecedents to this work, the TRELSU
Lexicon and the TRELSU-HS dataset. The TRELSU
Lexicon is the first LSU monolingual dictionary and
is publicly available
1
. Composed by 315 signs, this
lexicon was built for LSU systematization and as a
grammatization tool, and has only one repetition of
each sign present in the corpus. Consequently it is
not suited to train automatic sign recognition sys-
tems. In order to perform automatic recognition of the
TRELSU Lexicon, TRELSU-HS
2
is an imbalanced
dataset composed of more than 3000 static images for
handshape recongnition with 30 classes sampled from
5 native signers (Stassi et al., 2020).
To enable the development of a system for the au-
tomatic recognition of LSU, it is necessary to build
an appropriate dataset, including 3D information (by
active or passive stereo, for example) in order to dis-
ambiguate hand occlusions and capture the spatial
dynamics of the specific LSU signs. In this paper
we introduce LSU-DS, the first dataset for automatic
recognition of LSU at different levels: manual alpha-
bet, isolated signs and sentences. LSU-DS is a dy-
namic public domain dataset which includes triplets
of stereo videos and the 3D models for all the regis-
ters.
In the following sections we describe how the
dataset was constructed, its characteristics, some eth-
ical aspects involved and give elements about the
dataset license of use. Finally, we comment on the
obtained dataset and propose some future works.
1
http://tuilsu.edu.uy/TRELSU/
2
https://github.com/ariel-stassi/TRELSU-HS
2 METHODS
The acquisitions took place in Montevideo, Uruguay,
during several sessions in November and December
of 2019 in the Early Childhood Learning Labora-
tory of the Interdisciplinary Center on Cognition for
Teaching and Learning (CICEA)
3
, a perception labo-
ratory with an instrumented room for the video reg-
istrations and a control room separated by a window,
where the researchers directed the process.
Figure 1: LSU-DS participants: 10 signers, freely dressed
without gloves or other markers. See text for more details.
Participants. The video clips were produced by 10
signers, one frame of the frontal camera video for
each one are illustrated in Fig. 1. Five were female
and five male (average age = 44.2 years with stan-
dard deviation = 13.9 years). Seven of them were
born deaf. Nine signers have right dominant hand and
1 does not show preference for one particular hand.
From the 10 participants, 3 have at least one other
deaf person in the family nucleus. In one case several
members of the family are deaf. Concerning educa-
tional level, 3 finished university level, 2 have some
university studies, 2 finished the secondary studies, 2
are currently doing their secondary studies and 1 fin-
ished the basic school. Concerning the LSU language
acquisition, 3 acquired the LSU language before they
were 5 years old, 2 between 6 and 12 years old, and
the rest after 12 years old.
Data Acquisition. Three Flir Backfly S cameras
were used, connected in such a way that camera ‘0’,
located at the center of the 3-camera array, triggered
the other two. Cameras ‘1’ and ‘2’ captured the left
and right sides of the signer, respectively. All cameras
were arranged at the same height and in such a way
that the hands of the signer were always visible. The
frame captured the signer, including his hands, at all
times. Before the acquisition, the cameras were cal-
ibrated for stereo vision. The stereo calibration was
estimated between camera ‘0’ and camera ‘1’ and be-
tween camera ‘0’ and camera ‘2’. During the record-
ings, the signer stood still within a previously marked
box on the floor, towards which the cameras were ori-
ented.
3
Interdisciplinary Space, Universidad de la Rep
´
ublica
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
698

Each subject produced several repetitions of a
given letter, sign or sentence. The result was a triplet
of raw videos. During the acquisition process times-
tamps from PsychoPy (Peirce, 2007) were used to
mark the beginning and end of each letter, sign or
sentence. Individual registers were segmented using
timestamps and refined manually by visual inspection
of each image sequence. Finally, 3 videos per regis-
ter were conformed using ‘ffmpeg’, one per camera.
Each video has a 1280×1024 pixels resolution and a
25 fps frame rate. The videos are saved in mp4 for-
mat by using codec H.264 (libx264). The pixel for-
mat used in the ffmpeg SW was the default one, i.e.,
YUV420p.
Interaction with the Signers During the Video Ac-
quisition. In order to give instructions to the par-
ticipants, the PsychoPy
4
software was used, which
is a free development platform equipped with a wide
range of tools for psychology and linguistics experi-
ments. At the beginning of the registration session, a
global explanation of the whole procedure was given
and each participant filled the informed consent form.
Then, each task was explained and it was verified the
understanding by the participant. During the exper-
iment, a set of video stimuli was presented through
the PsychoPy, from which instructions were given and
information on the occurrence of events (master cam
timestamps) was collected to facilitate video segmen-
tation. All communication with the signers were in
LSU.
An initial and final position for each sign or sen-
tence resting position was defined as the signer stand-
ing upright, looking straight ahead, with hands in
front of the body, one on top of the other on the lower
abdomen.
Data Curation. As is well known, data curation is
a crucial and time consuming task that must be per-
formed with great care. The acquired videos con-
sisted of a set of frames in raw format. First, an au-
tomatic temporal segmentation of each task was con-
ducted based on the timestamps registered with Psy-
choPy. The segmented frame sequences were then
converted to mp4 videos. From that point on, the
data curation was an iterative process with the fol-
lowing steps: (1) Refine the temporal segmentation
by visual inspection, (2) Verify the linguistic content
of each video, (3) Organize data in directories so that
they are correctly interpreted by OpenPose and Me-
diaPipe, (4) Process videos with OpenPose and Me-
diaPipe, (5) Verify the OpenPose and MediaPipe de-
4
PsychoPy is available at https://www.psychopy.org/
tections on each video and (6) Produce the metadata
files.
3 ETHICAL ASPECTS
The participant signers were volunteers and it was
agreed that they could abandon the experiment at
any moment without explanation. The acquisition
of this dataset was approved by the Ethics Commit-
tee of the School of Psychology of the Universidad
de la Rep
´
ublica. According to their recommenda-
tion, all participants signed an informed consent form
that clearly explained the use of the registers for re-
search purposes, including their public availability.
The LSU-DS web page includes an empty copy of
the informed consent document signed by each par-
ticipant.
4 LINGUISTIC TASKS
LSU-DS includes recordings at three different levels
of the LSU language: manual alphabet, isolated signs,
and sentences. In order to best ensure independent
repetitions of the linguistic tasks (LT), each letter and
sign involved was performed by the signer only one
time per complete task instance. In the case of sen-
tences this was in general the procedure, with excep-
tions dully annotated in the metadata.
4.1 Manual Alphabet
Each signer produced two consecutive repetitions of
the complete LSU alphabet: A, B, C, D, E, F, G, H, I,
J, K, L, LL, M, N,
˜
N, O, P, Q, R, S, T, U, V, W, X, Y, Z.
An exception was signer 5 who made four repetitions.
Signers were asked to execute the alphabet at a mod-
erate speed and to return to the resting position after
each letter.
4.2 Isolated Signs
The isolated signs are individual lexical pieces reg-
istered outside a sentence. Isolated here means that
the recording of each sign begins and ends at the pre-
viously defined resting position. With some excep-
tions, three repetitions of each of 23 isolated signs
were recorded for each signer, except for signer 10,
who register four repetitions.
The 23 signs were selected by LSU specialists.
Using a phonological complexity criterion, the signs
were selected as examples of the following five cate-
gories:
LSU-DS: An Uruguayan Sign Language Public Dataset for Automatic Recognition
699
a. Unimanual Signs without Movement The
sign is defined by the activity of a single hand with
constant parameters over time. The following 8 let-
ters of the alphabet are also examples of this category:
A, B, C, D, E, F, I, K.
b. Unimanual Signs with a Single Movement
The sign is defined by the activity of a single hand,
which presents the change of only one of the manual
parameters, either the handshape, the place of articu-
lation, or the hand orientation.
c. Unimanual Signs with More Than One
Movement The sign is defined by a single hand ac-
tivity, characterized by combining changes of more
than one manual parameter, either handshape, place
of articulation, or hand orientation.
d. Symmetrical Bimanual Signs: The sign is de-
fined by both hands activity, which have a “mirror”
behavior.
e. Asymmetrical Bimanual Signs: The sign is
defined by both hands activity, which have indepen-
dent or correlated behaviors, in the second case with
time delays.
Table 1 includes a sign number, hereafter used to
refer to that linguistic content on the dataset, as well
as the Spanish translation and English meaning of the
isolated sign.
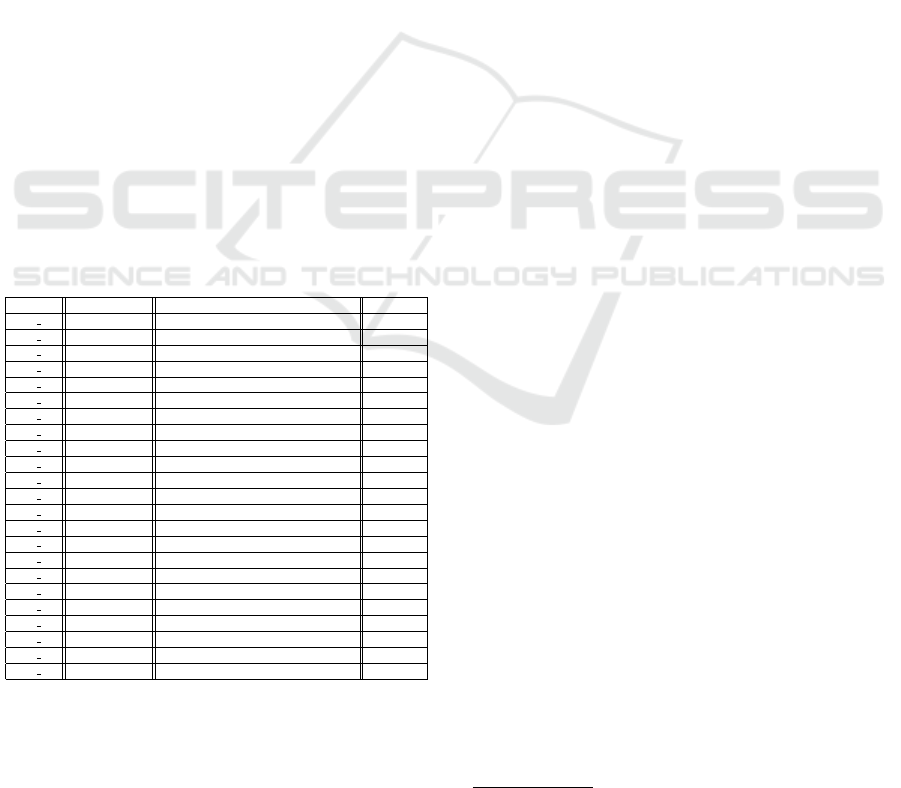
Table 1: Isolated signs used in LT 2. 1st. column: LSU-
DS ID of the sign. 2nd. column: Spanish translation. 3rd
column: an example of English sentence using the sign (in
italic). See text for category explanation.
ID Spanish Example in English Category
sign 01 Gas Oxygen is a Gas a
sign 02 Poco Few things a
sign 03 Permiso Excuse me, I need to pass a
sign 04 Mate She drinks Mate infusion b
sign 05 Nieto My grandson is handsom b
sign 06 Perro My dog is barking b
sign 07 Mujer Mary is a woman b
sign 08 Rio Nile river b
sign 09 Ambulancia The ambulance came fast c
sign 10 Club I do sports at the club c
sign 11 Obsesi
´
on He has an obsession with gambling c
sign 12 Sucio His clothes are dirty c
sign 13 Playa Canc
´
un beach c
sign 14 Colores Rainbow colors d
sign 15 Campamento The camping has many tents d
sign 16 Estudiar I study maths d
sign 17 Primo I play with my cousin d
sign 18 Imagen The photo is an image d
sign 19 Ense
˜
nar To teach a language e
sign 20 Mec
´
anico The mechanic repairs the car e
sign 21 Responsable She is a responsible person e
sign 22 Teatro The theater is an art e
sign 23 Geometr
´
ıa Pythagoras tought geometry e
4.3 Sentences
In this task the signers were asked to perform seven
sentences. Each sentence is composed by a subset of
the isolated signs from the LT 2 in combination with
some new signs (see table 2). The aim is to generate
data in which the isolated signs are part of a contin-
uous sentence and facilitate the elaboration of algo-
rithms for automatic temporal segmentation, for ex-
ample. This task was conceived as an initial step to-
wards a system of continuous LSU automatic recog-
nition.
The sentences includes different modes: affirma-
tive, negative, interrogative, and exclamative. Table 2
shows the signs sequence of each of the used sen-
tences as well as a possible rough translation
5
. The
table includes also a number associated to each sen-
tence, hereafter used to refer to that linguistic content
on the dataset. Each signer perform between 2 and 6
repetitions. Subject 6 did not perform this task. More
details can be seen in the LSU-DS website.
Table 3 includes, for each repetition and subject,
both the cases where the signer performs the signs
in same order as the proposal (marked as OK) and
the variations introduced in the sentences. The table
uses the following codes for variations: [A] Addition:
the signer adds at least one sign; [O] Omission: the
signer omits at least one sign; [P] Permutation: the
signer changes the order of the signs; [S] Synonym:
the signer uses at least one synonym sign; [FV] Pho-
netic variation: the signer introduces a phonetic vari-
ation of the sign (small differences in the sign param-
eters of the same sign); and [ST] Substitution: the
signer changes at least one sign by another with dif-
ferent meaning.
The cases of multiple variations are also signaled.
LSU-DS includes a metadata file for each register
specifying the corresponding linguistic content with
more detail. Note that some signers introduce a lot of
variations, e.g. subject 10. This LT can be useful for
linguistic studies. For ASLR purposes, the OK sen-
tences as well as some variations (O, P, FV) can be
used.
5 POSE DETECTION
LSU-DS includes the outputs of two methods for pose
detection: OpenPose and MediaPipe.
OpenPose. OpenPose is a Convolutional Neural
Network (CNN) based system used to jointly esti-
mate body, hand, facial and foot postures (135 key-
points) of multiple persons on single images (Cao
et al., 2019). LSU-DS includes the following 2D and
3D detections: hand, face and body outputs without
5
The letter @ is used to refer to an undefined gender of
a noun or an adjective.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
700
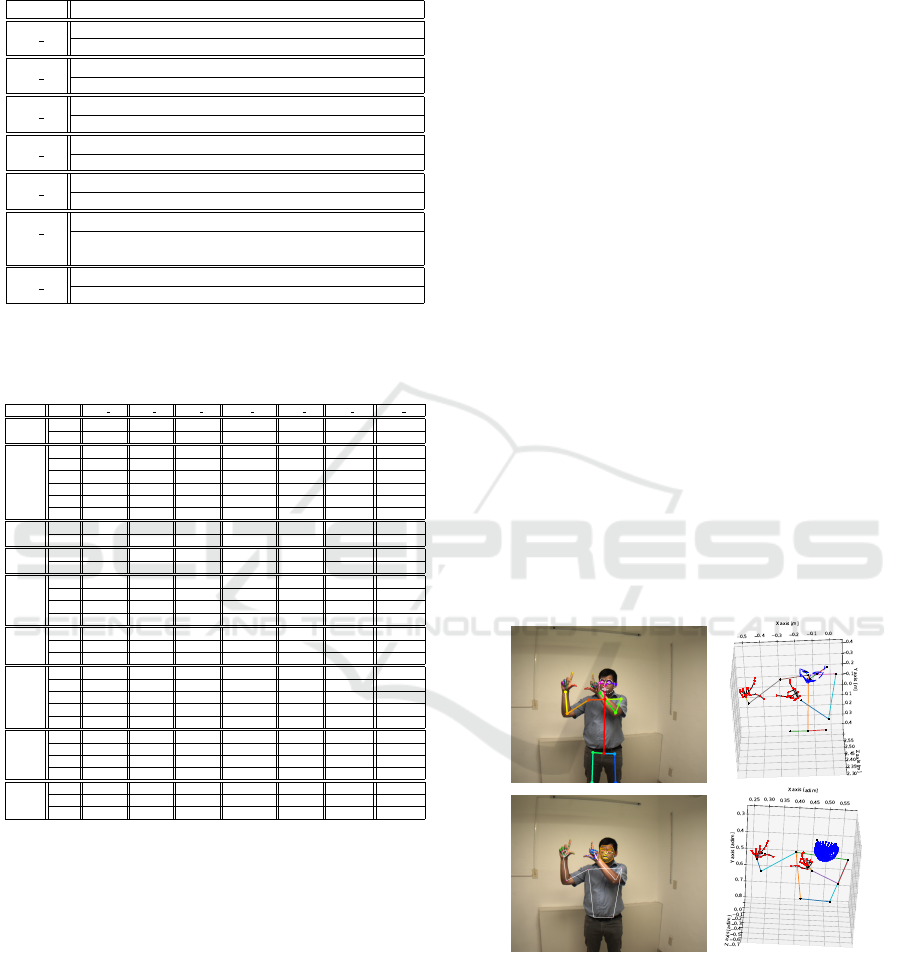
Table 2: Sentences used in LT 3. Left: LSU-DS identifier
used. Right: (above) signs sequence asked to perform and
(below) a possible rough translation of the sentence.
ID Signs sequence (above) and rough translation (below)
sent 01
MI PRIM@ RESPONSABLE MUY
My cousin is too responsible
sent 02
IMAGEN PERR@ BEB
´
E LIND@
There is a very cute puppy dog in the picture
sent 03
MI NIET@ GEOMETR
´
IA ESTUDIAR
My granddaughter/grandson studies geometry
sent 04
MAESTR@ LLEVAR NI
˜
NOS R
´
IO
The teacher takes the children to the river
sent 05
¿C
´
OMO-EST
´
AS? ¡VAMOS ESTUDIAR GEOMETR
´
IA!
How are you? Let’s go to study geometry!
sent 06
MI NIET@ MATE GUSTAR PERO IR R
´
IO NO
My granddaughter/grandson likes mate
but he/she does not like to go to the river
sent 07
´
EL/ELLA MEC
´
ANICO PERSONA GUSTAR NO
He/she does not like his/her mechanic
Table 3: LT 3. Variations introduced in the sentences by
repetition and signer. See text for an explanation of the used
codes. Empty cells are not performed instances.
Signer Rep. sent 01 sent 02 sent 03 sent 04 sent 05 sent 06 sent 07
s
1
r1 OK A OK OK OK OK OK
r2 OK OK OK OK OK OK OK
s
2
r1 OK P OK OK P, S O, ST, P FV, P
r2 A A, P O OK O A, P FV, A
r3 P, S, A O, S OK OK A, P O, P FV, A, P
r4 S P, S OK P OK P P
r5 O, S OK OK OK P S, P P
r6 S OK S OK P S, P ST, P
s
3
r1 OK P P OK OK P P
r2 OK P, A OK OK P P
s
4
r1 OK OK ST OK FV ST OK
r2 OK OK OK OK OK
s
5
r1 O OK ST OK ST P ST, S
r2 FV OK ST OK ST P S
r3 OK OK ST OK
r4 OK ST
s
7
r1 OK OK OK OK OK O OK
r2 OK OK OK OK OK P OK
r3 OK OK OK OK OK
s
8
r1 OK OK OK OK OK S, P ST
r2 OK OK P OK OK S, P OK
r3 OK OK P OK OK P P
r4 A
r5 A
s
9
r1 S S FV A OK S, P ST
r2 S A, S FV A OK S, P ST, P
r3 S S FV A OK S, P ST
r4 A OK S, P ST
s
10
r1 S A, S O, A, S FV, S, ST S S, A, O O, S, P
r2 S A, S O, A, S FV, S, ST S S, A, O ST, S, P
r3 S A, S O, A, S FV, S, ST S S, A, O ST, S, P
post-processing.
OpenPose keypoints detection is performed on
each of the 2D images acquired by the three cameras.
The stereo calibration of the cameras allows to trian-
gulate the keypoints and obtain their 3D position in
meters. In this way, an articulated 3D model of the
signers is produced, including the positions of hips,
trunk, head, face, arms, hands and fingers as illus-
trated in Fig. 2, upper row. These 3D models can
be useful to better learn the signing space and iden-
tify the performed signs, specially when a region of
interest of the signer is occluded by another.
MediaPipe. MediaPipe is a machine learning based
framework for building perception pipelines for mul-
tiple platforms (Lugaresi et al., 2019). The sys-
tem estimates body, hand, facial and foot postures
(543 keypoints) of multiple persons on single images.
LSU-DS includes the following MediaPipe detec-
tions: hand, face and body outputs without any post-
processing of detected landmarks. Figure 2 (lower
row) illustrates the MediaPipe detections. The key-
points detected for each frame are provided in a text
file associated to each video on the LSU-DS.
Comparison. A comparison was done between
both systems for each register of LT 1 in order to eval-
uate their consistency. 2D keypoints were detected
for each view. Then the euclidean distance was calcu-
lated between the corresponding OpenPose and Me-
diaPipe relevant markers for ASLR (trunk, arms, and
hands), whenever this comparison was possible (i.e.
both methods detected all the keypoints to compare,
which happens in 95% of the frames). For the hands,
discrepancy was measured as the euclidean distance
between the hand keypoints after subtraction of the
centroid of the hand detected by the corresponding
model. As a normalization, each difference was di-
vided by the length of the signer’s trunk given by
OpenPose. The mean error between both methods
was lower than 5% for the whole set of keypoints and
for the hand the discrepancy was lower than 3%.
1
Figure 2: 2D detections and 3D reconstruction on a frame
of an LSU-DS register with the frontal camera with pose
detections. Upper row, OpenPose. Lower row, MediaPipe.
6 DATASET DESCRIPTION
The LSU-DS dataset is publicly available at https:
//iie.fing.edu.uy/proyectos/lsu-ds and can be down-
LSU-DS: An Uruguayan Sign Language Public Dataset for Automatic Recognition
701
loaded after accepting the terms of use defined in the
license (see Sec. 7).
Table 4 gives a general description of download-
able LSU-DS database. There are one json and one
txt files per frame. The dataset includes some sup-
plementary files (e.g. metadata files). The download-
able files are compressed by task. The table shows the
dataset task sizes once decompressed.
Table 4: General characteristics of LSU-DS.
Name Linguistic Number of files Size
Task video json / txt video (MB) json / txt (GB)
LSU-DS-T1 1 1848 164.871 454 1.10 / 7.47
LSU-DS-T2 2 2148 277.158 800 1.83 / 12.56
LSU-DS-T3 3 570 118.185 385 0.79 / 5.36
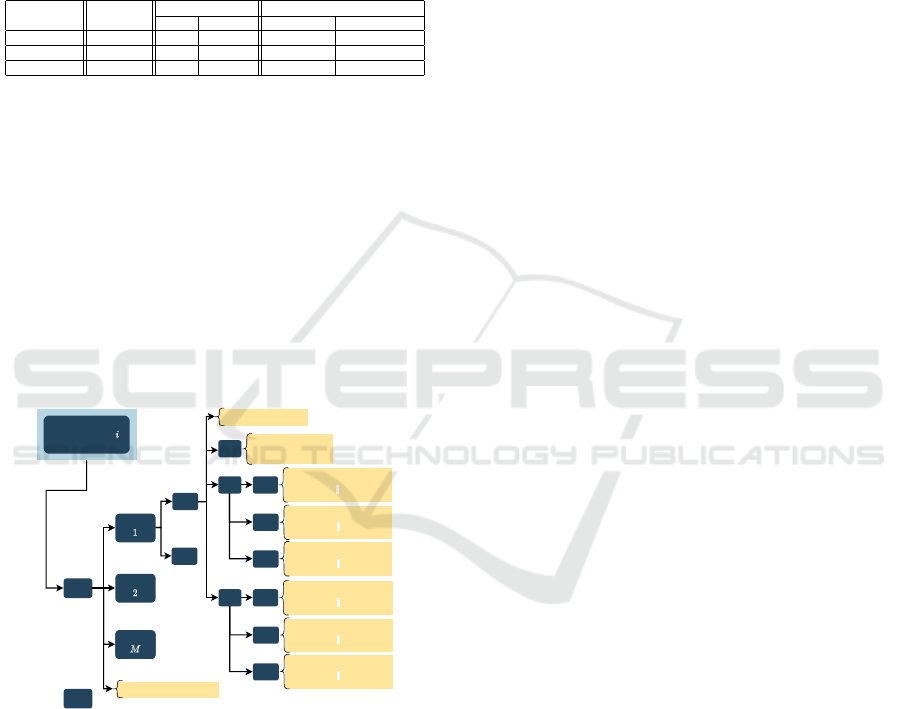
The dataset is organized in a tree structure as
shown in Fig. 3. Each task includes a directory per
signer and subtask. For each signer and subtask there
is a triplet of videos for a set of repetitions as ex-
plained in Section 4. For each task and signer the
corresponding projection matrices are included. LT 3
includes a gloss file per video comprising: (a) tem-
poral limits of each sign, (b) temporal limits of the
whole sentence and (c) its Spanish translation. Each
triplet of videos has the corresponding json and txt
files per video frame, with the 2D keypoint detections
on each camera view and the 3D keypoint detections,
both produced by the OpenPose and MediaPipe SW.
.
.
.
S01
Subtask
M
rep1
json
.
. .
.
S10
cam0
Ti_S01_ST1_r1_cam0_fr000.json
Ti_S01_ST1_r1_cam0_fr001.json
⋮
Ti_S01_ST1_r1_cam0_fr088.json
mp4
Ti_S01_ST1_r1_cam0.mp4
Ti_S01_ST1_r1_cam1.mp4
Ti_S01_ST1_r1_cam2.mp4
cam1
Ti_S01_ST1_r1_cam1_fr000.json
Ti_S01_ST1_r1_cam1_fr001.json
⋮
Ti_S01_ST1_r1_cam1_fr088.json
rep2
cam2
Ti_S01_ST1_r1_cam2_fr000.json
Ti_S01_ST1_r1_cam2_fr001.json
⋮
Ti_S01_ST1_r1_cam2_fr088.json
T1_S01_calibration_matrices.txt
Ti_S01_r1_metadata.txt
txt cam0
Ti_S01_ST1_r1_cam0_fr000.txt
Ti_S01_ST1_r1_cam0_fr001.txt
⋮
Ti_S01_ST1_r1_cam0_fr088.txt
cam1
Ti_S01_ST1_r1_cam1_fr000.txt
Ti_S01_ST1_r1_cam1_fr001.txt
⋮
Ti_S01_ST1_r1_cam1_fr088.txt
cam2
Ti_S01_ST1_r1_cam2_fr000.txt
Ti_S01_ST1_r1_cam2_fr001.txt
⋮
Ti_S01_ST1_r1_cam2_fr088.txt
Linguistic Task
Subtask
Subtask
Subtask
Figure 3: Dataset organization at different levels: linguistic
task, subject, subtask, repetition. For each repetition there
are three mp4 files corresponding to each camera, a json
directory including one directory for each camera with the
OpenPose json files corresponding to each frame and a sim-
ilar structure with the MediaPipe txt files. The calibration
matrices file is only available for OpenPose. Directories in
blue and files in yellow. The position of task and subtask
IDs in the filenames are in red.
As it can be observed in Section 4 the obtained
dataset is approximately balanced in terms of sam-
ples per class. This aspect is particularly relevant for
the training stage of a recognition system. Regarding
LT 1, all the signers (with exception of signer 5) per-
formed 2 repetitions. In the LT 2, all the subjects ex-
cept the signer 1, performed at least 3 times the com-
plete task. Finally, in the LT 3, all the signers (except
signers 3 and 4) performed at least 2 repetitions of
each sentence, in some cases perform 6 repetitions.
7 LICENSE
LSU-DS was developed in compliance with the
Uruguayan personal data protection regulations. Data
is available for research and educational purposes to
qualified requesters only if the data are used and pro-
tected in accordance with the terms and conditions
stated in the LSU dataset Restricted Use License, in-
cluded in the web page.
8 USE RECOMENDATIONS
For a better LSU-DS use, some recommendations of
the dataset and particularities encountered during data
curation are given.
In the LSU-DS context, the term “margin” refers
to the number of initial and final frames of an indi-
vidual record, in which the signer stays in the rest-
ing position. During video segmentation, a margin of
15 to 20 frames was included around the actual sign
in LT 1, and of 25 to 30 frames in LT 2 and 3. In
LT 1 signers were asked to execute the manual alpha-
bet at a moderate pace. Despite this, margins of less
than 15 frames between letters were observed in some
cases. In LT 2 and 3, the experimental design included
a video stimulus before the execution of each sign.
Therefore, it was expected that the execution of signs
and sentences would have appropriate margins. How-
ever, some signers introduced movements that limit
the “quality” of the sought margins.
Due to ethical considerations mentioned in Sec-
tion 3, prior to the execution of the sign or sentence,
signers were asked if they were ready and wished to
continue. Some participants nodded with their head
or with their hand, generating some artifacts in the
desired margins.
During the execution of the letters, isolated signs
or sentences themselves and without express request,
some signers showed different behaviors compared to
the rest. In LT 1, in some cases the signers change
the resting position. Signer 5 adopt a different one,
putting the hands at the sides and even behind the
body. Signer 3 performed LT 1 and 2 changing the
dominant hand between repetitions. There were also
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
702

slight variations in the phonetic configuration of the
signs themselves. A particular case arises with sub-
ject 9 of sign sucio (dirty in English). The subject
changed the sign to olor (smell). This is signaled in
the metadata but illustrates the difficulty of this type
of dataset, which combines the natural difficulties of
any registration of repetitive gestures with the human
introduced variability of LT.
Some signers showed clear lip activity during the
execution of the signs or sentences. This illustrates
the natural variability inherent to LSU, in the re-
sponses of the signers to the same stimuli. The meta-
data files specifies all this variations in detail.
As mentioned in Section 4 and illustrated in ta-
ble 3, in LT 3 some subjects produced different signs
than the claimed one (sign permutations, word associ-
ation or word elicitation). In some cases the registers
maintain their value for the recognition of signs in the
context of a sentence. This can be useful for other
purposes also, e.g. for psycholinguistic studies on the
differences between the instruction and the execution
of a sentence. These cases are labeled in the dataset,
in order to be considered as special cases during the
training of a continuous LSU speech recognition sys-
tem.
The high degree of hands overlapping in the rest-
ing position, in some cases generates noisy OpenPose
hand model fitting. It is suggested to take care of this
consideration in the construction of detection or seg-
mentation algorithms.
In LT 1, the relevant information is exclusively
present in the handshapes, sometimes including hand
movement. As the LT becomes more complex (iso-
lated signs and sentences) the information is present
not only in the handshapes but also in other manual
parameters, the whole body and the relative position
and dynamics of its parts. In LT 3 the facial activity is
relevant during the execution of the signs, helping the
signer to complete the grammar and semantics of the
performed sentences. All these aspects of language
must be taken into account in order to design suitable
systems for processing and automatic recognition.
9 PRELIMINARY RESULTS
In order to explore the potentiality of the LSU-DS,
the Video Transformer Network-Pose Flow (VTN-
PF) method (De Coster et al., 2021) was used. VTN-
PF is based on the VTN architecture which uses
a CNN stage for feature extraction from RGB im-
ages, and multi-head self-attention and convolutional
blocks for modeling the temporal interdependence be-
tween frames (Kozlov et al., 2019). VTN-PF also uses
the OpenPose output for hand tracking and cropping
and for pose flow estimation, improving the results
for ASLR. For our experiment the LT 2 front view
videos and their OpenPose models were fed to the
network. We used the VTN-PF pretrained network
6
with the standard parameters (sequence length = 16
and temporal stride = 2). The linear layer was rede-
fined and fitted (learning rate = 10
−3
, early stopping
with patience of 10 epochs) in order to classify over
the 23 signs of LT2. A 10-fold signer independent
cross-validation procedure was performed, by split-
ting the data in 3 subsets per fold: 1 signer for testing,
and the other 9 for training and validation (one valida-
tion signer was randomly chosen and the rest used for
training). The classification accuracy obtained with
this approach was of 93.43% for top-1, 98.18% for
top-2 and 99.58% for top-5.
10 CONCLUSIONS
This paper presents and describes the first dataset for
automatic LSU recognition at different levels: manual
alphabet, isolated signs, and sentences. The LSU-DS
dataset is openly available to the scientific community
and includes gloss information as well as pose models
produced by OpenPose and MediaPipe approaches. A
first experiment of training a state of the art ASLR
network shows the potentiality of the LSU-DS dataset
for machine learning applications.
The construction of this dataset was an interdisci-
plinary effort including linguists, engineers, psychol-
ogists and the active participation of the Uruguayan
Deaf Community.
This effort is useful not only to improve the re-
search activity both in the engineering and psycholin-
guistic fields but also to increase the visibility and in-
clusion of the deaf community. The LSU-DS is a new
tool and a new ingredient to the already active field
of LSU research that includes sociolinguistic studies,
linguistic studies and cultural studies, among others.
In the LT 3 several signers showed some variations
in the replication of the proposed sentences. This fact
suggests the importance of a good understanding of
the LSU complexity, and confirms the necessity of a
more active involvement of the deaf community in the
design and development of this type of tools.
6
https://github.com/m-decoster/ChaLearn-2021-LAP
LSU-DS: An Uruguayan Sign Language Public Dataset for Automatic Recognition
703

11 FUTURE WORK
After more than one year of intense work in order to
have the LSU-DS dataset, we can begin to use it in
different fields. The dataset will be useful for psy-
cholinguistic studies and also for the training and test-
ing of automatic segmentation, detection and recogni-
tion algorithms.
This first experience was carried in the controlled
conditions of the lab as other available datasets re-
ported in the literature. In the future we plan to en-
rich the dataset with acquisitions outside the lab with
varying scene conditions. This is a necessary trend
that only recently has begun (a notable example is the
AUTSL dataset (Sincan and Keles, 2020) in 2020).
The dataset will be enriched with new metadata
and temporal markers to identify different linguistic
units. In the future, these new data will include infor-
mation such as oral language translation in English
by sign and sentence, phonological description and
grammar type of each sign as well as the syntactic
function of the signs into sentences. A main challenge
is to include labels referring to non-manual sign pa-
rameters such as body tilt, head motion/position, and
facial expressions of the subjects done when signing.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge the contribution
of Mar
´
ıa E. Rodino with the gloss, Federico Lecum-
berry and Gabriel G
´
omez for their help in the web site
installation and to the reviewers’ comments, which
improved the article.
REFERENCES
Cao, Z., Hidalgo Martinez, G., Simon, T., Wei, S., and
Sheikh, Y. A. (2019). Openpose: Realtime multi-
person 2d pose estimation using part affinity fields.
IEEE Transactions on Pattern Analysis and Machine
Intelligence.
Cheok, M. J., Omar, Z., and Jaward, M. H. (2019). A re-
view of hand gesture and sign language recognition
techniques. International Journal of Machine Learn-
ing and Cybernetics, 10(1):131–153.
Cooper, H., Holt, B., and Bowden, R. (2011). Sign language
recognition. In Visual analysis of humans, pages 539–
562. Springer.
De Coster, M., Van Herreweghe, M., and Dambre, J.
(2021). Isolated sign recognition from rgb video us-
ing pose flow and self-attention. In Proceedings of the
IEEE/CVF CVPR Workshops, pages 3441–3450.
Dreuw, P., Deselaers, T., Keysers, D., and Ney, H. (2006).
Modeling image variability in appearance-based ges-
ture recognition. In ECCV Workshop on Statistical
Methods in Multi-Image and Video Processing, pages
7–18.
Koller, O., Ney, H., and Bowden, R. (2016). Deep hand:
How to train a cnn on 1 million hand images when
your data is continuous and weakly labelled. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 3793–3802.
Kozlov, A., Andronov, V., and Gritsenko, Y. (2019).
Lightweight network architecture for real-time action
recognition.
Kumar, P. P., Vadakkepat, P., and Loh, A. P. (2010). Hand
posture and face recognition using a fuzzy-rough ap-
proach. International Journal of Humanoid Robotics,
7(03):331–356.
Lugaresi, C., Tang, J., Nash, H., McClanahan, C., Uboweja,
E., Hays, M., Zhang, F., Chang, C., Yong, M. G., Lee,
J., Chang, W., Hua, W., Georg, M., and Grundmann,
M. (2019). Mediapipe: A framework for building per-
ception pipelines. CoRR, abs/1906.08172.
Peirce, J. W. (2007). Psychopy-psychophysics software in
python. Journal of neuroscience methods, 162(1-2):8–
13.
Pisharady, P. K., Vadakkepat, P., and Loh, A. P. (2013). At-
tention based detection and recognition of hand pos-
tures against complex backgrounds. International
Journal of Computer Vision, 101(3):403–419.
Pugeault, N. and Bowden, R. (2011). Spelling it out: Real-
time asl fingerspelling recognition. In Computer Vi-
sion (ICCV Workshops), IEEE International Confer-
ence on, pages 1114–1119. IEEE.
Ronchetti, F., Quiroga, F., Estrebou, C. A., and Lanzarini,
L. C. (2016a). Handshape recognition for argentinian
sign language using probsom. Journal of Computer
Science & Technology, 16.
Ronchetti, F., Quiroga, F., Estrebou, C. A., Lanzarini, L. C.,
and Rosete, A. (2016b). Lsa64: an argentinian sign
language dataset. In XXII Congreso Argentino de
Ciencias de la Computaci
´
on.
Sincan, O. M. and Keles, H. Y. (2020). AUTSL: A large
scale multi-modal turkish sign language dataset and
baseline methods. CoRR, abs/2008.00932.
Stassi, A. E., Delbracio, M., and Randall, G. (2020).
TReLSU-HS: a new handshape dataset for uruguayan
sign language recognition. In 1st International Virtual
Conference in Sign Language Processing.
Trettenbrein, P. C., Pendzich, N.-K., Cramer, J.-M., Stein-
bach, M., and Zaccarella, E. (2021). Psycholinguistic
norms for more than 300 lexical signs in german sign
language. Behavior Research Methods.
Von Agris, U., Knorr, M., and Kraiss, K.-F. (2008a). The
significance of facial features for automatic sign lan-
guage recognition. In 2008 8th IEEE International
Conference on Automatic Face & Gesture Recogni-
tion, pages 1–6. IEEE.
Von Agris, U. and Kraiss, K.-F. (2007). Towards a video
corpus for signer-independent continuous sign lan-
guage recognition. Gesture in Human-Computer In-
teraction and Simulation, Lisbon, Portugal, May.
ICPRAM 2022 - 11th International Conference on Pattern Recognition Applications and Methods
704

Von Agris, U., Zieren, J., Canzler, U., Bauer, B., and Kraiss,
K.-F. (2008b). Recent developments in visual sign
language recognition. Universal Access in the Infor-
mation Society, 6(4):323–362.
LSU-DS: An Uruguayan Sign Language Public Dataset for Automatic Recognition
705
