
Comparing Monocular Camera Depth Estimation Models for Real-time
Applications
Abdelrahman Diab
a
, Mohamed Sabry
b
and Amr El Mougy
c
Computer Science Department, German University in Cairo, Cairo, Egypt
Keywords:
Depth Estimation, Monocular Camera, Computer Vision, Image Processing, Deep Neural Networks.
Abstract:
Monocular Depth Estimation (MDE) is a fundamental problem in the field of Computer Vision with ongoing
developments. For the case of challenging applications such as autonomous driving, where highly accurate
results are required in real-time, traditional approaches fall short due to insufficient information to understand
the scene geometry. Novel approaches utilizing deep neural networks show significantly improved results, es-
pecially in autonomous driving applications. Nevertheless, there now exists a number of promising approaches
in literature and their performance has never been compared head-to-head. In this paper, a detailed evalua-
tion of the performance of four selected deep learning networks is presented. We identify a set of metrics to
benchmark the selected approaches from different aspects, especially those related to real-time applications.
We analyze the results and present insights into the performance levels of the various approaches.
1 INTRODUCTION
Nowadays, many production vehicles are equipped
with Advanced Driver Assistance Systems (ADAS)
that contain on board sensors such as cameras and
RADARs. This allows the integration of various mod-
ules for perception and scene understanding and ac-
cordingly contribute to higher safety standards. One
of the main modules to be integrated is depth estima-
tion, which can significantly enhance the performance
of other modules such as Object classification (Ciubo-
tariu et al., 2021) and Semantic Segmentation (Hoyer
et al., 2021). Depth estimation can be accurately
done using ranging sensors such as RADARs and Li-
DARs. However, these sensors are not widely inte-
grated in ADAS systems compared to cameras, es-
pecially monocular cameras. Depth estimation based
on cameras is possible, but is generally considered
a computationally-heavy task with less accurate re-
sults compared to ranging sensors. Accordingly, im-
proving the accuracy and reducing the complexity of
monocular depth estimation (MDE) would pave the
way for integrating it in more challenging applica-
tions that require high performance in real-time, such
as autonomous driving.
a
https://orcid.org/0000-0001-8375-7356
b
https://orcid.org/0000-0002-9721-6291
c
https://orcid.org/0000-0003-0250-0984
Traditional MDE approaches are based mainly on
computer vision (CV). These approaches are gener-
ally not computationally-heavy but do not produce
accurate results due to insufficient scene geometry
for depth estimation. With modern advances in
GPUs, there has been increasing interest in using deep
neural networks for MDE (either solely or in con-
junction with CV ). These approaches produce rel-
atively more accurate results than CV alone but are
significantly heavier, which means that their use in
real-time autonomous driving applications is ques-
tionable. Accordingly, the aim of this paper is to
compare the capabilities of the best performing net-
works across depth estimation benchmarks according
to their scores in accuracy metrics, inference speed,
qualitative results and their capability to perform in
real-time. The capabilities of the networks are tested
thoroughly on a vehicle in realistic settings, including
night-time driving, in order to gain deep insights into
their performance and behavior. To the best knowl-
edge of the authors, this is the first paper to present
such an extensive performance analysis of MDE neu-
ral network models.
The remainder of this paper is structured follows:
In section 2 preliminary knowledge needed to under-
stand the work in this paper will be introduced, fol-
lowed by a review of previous works in the depth esti-
mation literature. In section 3 the four networks used
in the comparisons are introduced and their respec-
Diab, A., Sabry, M. and El Mougy, A.
Comparing Monocular Camera Depth Estimation Models for Real-time Applications.
DOI: 10.5220/0010883700003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 673-680
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
673

tive implementations are explained in detail. Follow-
ing this, the results of the work is shown in section 4
by comparing the networks across different aspects.
Finally, the paper is concluded in Section 5.
2 RELATED WORK
For the camera based depth estimation task, multiple
research directions were tackled such as the follow-
ing:
2.1 Handcrafted Feature-based
Methods
With the dawn of Artificial Intelligence (AI), sci-
entists began experimenting with machine learning
techniques to solve the Monocular Depth Estimation
(MDE) task. In a work that strongly influenced later
developments, (Saxena et al., 2005) used supervised
learning to predict the depth from monocular cues in
images, and used regression to estimate the pixel’s
depth value in an end-to-end manner. This work was
followed by many researchers proposing models to
estimate 3D structure from a 2d image using gradi-
ent sampling (Choi et al., 2015), perspective shift-
ing (Ladicky et al., 2014), analysis of light flow (Fu-
rukawa et al., 2017), as well as many other approaches
(Hoiem et al., 2007; Konrad et al., 2013; Baig and
Torresani, 2016). These approaches were relatively
primitive with low performance results compared to
current deep learning approaches.
2.2 Deep Neural Networks based
Methods
Although there are many classical methods in the lit-
erature that tackle MDE, none of these techniques
produced sufficiently accurate results to provide a re-
alistic formula for solving the problem. This led to
scientists using deeper networks such as Convolu-
tional Neural Network (CNN)s to solve the MDE
problem. The models proposed used a variety of
learning methods, as well as many different variations
and configurations to produce their results.
2.2.1 Supervised Learning Models
This approach utilizes noisy and sparse reference
depth maps as ground truth labels to train super-
vised deep networks. These depth maps were con-
structed using point clouds from Light Detection And
Ranging (LIDAR) sensors or RGBD-cameras. (Go-
dard et al., 2017) proposed a CNN network archi-
tecture that was composed of two stacks. One of the
stacks focused on estimating the scene depth from a
global perspective, while the second stack performed
local refinements to counter the global bias of the
first stack. Along with this network architecture, the
authors also presented a new loss function that has
seen great use since its introduction. This new loss
function was named the Scale-Invariant loss function
(SILog). Instead of focusing on the general scale, this
function highlights the depth relation between the im-
age pixels.
Other papers such as (Lee et al., 2019) use a CNN-
based encoder network architecture to extract features
from the image. The extracted features are then input
to the decoder stage of the auto-encoder, which uses
the novel Local Planar Guidance (LPG) layer intro-
duced in their work in order to get the final depth pre-
diction. In (Song et al., 2021) the LapDepth network
was introduced which uses a similar auto-encoder net-
work architecture to the network in (Lee et al., 2019)
but with Laplacian pyramid residuals in the decoder
stage to compute depth.
(Ranftl et al., 2021) introduced the DPT network
which uses a vision Transformer as the backbone for
feature extraction which can achieve better accuracy
than cnn networks but requires a larger dataset com-
pared to the encoder based networks.
Another work can be seen in (Bhat et al., 2020)
which is built around combining the advantages of
both CNNs and Vision Transformer (Vi-T)s. The
authors use a CNN feature extractor as their encoder,
combined with a simple upsampling decoder whose
output is connected to the Adabins mini-ViT module.
2.2.2 Self-supervised Learning Models
Supervised methods demand a large amount of
ground truth data, which require careful handpick-
ing and significant time to produce. With this in
mind, efforts began to develop models that used self-
supervised learning for training models. These mod-
els trained networks to perform MDE using image
pairs from stereo camera setups (Garg et al., 2016;
Godard et al., 2017; Pillai et al., 2018) or synchro-
nized sequences of frames (Zhou et al., 2017).
Training with Stereo Images: (Garg et al., 2016)
proposed a CNN that retrieves depth maps by using
a stereo pair as input. The authors of this work intro-
duced a loss function that is equivalent to the photo-
metric difference between images. The model learns
the transformations necessary to recover depth infor-
mation using that loss function.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
674

Training with Monocular Video: (Zhou et al., 2017)
started research into this field with their proposed
self-supervised model which estimates the camera
pose as well as the depth. (Yang et al., 2017) then
introduced a regularization method called 3D as-
smooth-as-possible to acquired depth maps and sur-
face normals from images. A previous work by (Yang
et al., 2018) exploited edge recognition to predict
depth and surface normals.
(Yin and Shi, 2018) introduced a network that
uses a geometric consistency loss function which ig-
nores occlusions and outliers to predict depth and
camera pose, and aided in performing optical flow.
(Casser et al., 2018) made use of segmentation masks
to model dynamic objects, which was then used to
infer depth and visual odometry. At the same time,
(Mahjourian et al., 2018) developed a method to es-
timate ego-motion and depth simultaneously using a
geometric loss function that exploits temporal fea-
tures in the input. The term ego-motion refers to the
movement of the camera used in capturing between
different frames.
3 NETWORK
IMPLEMENTATIONS
The aim is to compare the performance of top monoc-
ular depth estimation networks to work under real-
time conditions. In this work, the four highest ranked
networks on the KITTI (Eigen split) benchmark are
compared. These networks are:
1. The AdaBins network in (Bhat et al., 2020).
2. The LapDepth network in (Song et al., 2021).
3. The Dense Prediction Transformer (DPT) net-
work in (Ranftl et al., 2021).
4. The Big to Small (BTS) network in (Lee et al.,
2019).
The following part will mention the details of the
four methods compared in this work starting with the
Big To Small network(BTS) (Lee et al., 2019), which
is ranked 4th on the KITTI (Eigen Split) Benchmark.
In their network implementation, they used an en-
coder network to extract features from the image,
which are then used as input to the decoder network.
The authors proposed the novel LPG layer in their
decoder, which performs the entire decoding process
with only 0.1M parameters.
The second model in this work’s comparison is
the LapDepth(Song et al., 2021) network which uses
a similar auto-encoder network architecture to BTS
with the exception of the decoder stage. In this stage,
they propose the use of Laplacian pyramid residuals
to compute depth. The estimated size of parameters
in the LapDepth decoder is 15M, which is nearly 150
times the features in the BTS decoder. LapDepth as
of the time of writing, is currently ranked second on
the KITTI depth estimation benchmark.
The third encoder-based network Adabins (Bhat
et al., 2020) is built around combining the advantages
of both CNNs and Vi-Ts. The authors achieve the
current state-of-the-art by using a CNN feature ex-
tractor as their encoder, combined with a simple up-
sampling decoder whose output is connected to the
Adabins mini-ViT module. This work shows the
large potential of discretization based depth estima-
tion, as well as the potential of network architectures
that do not follow the normal encoder-decoder-output
pipeline.
Finally the DPT network (Ranftl et al., 2021)
which uses a vision transformer network as the back-
bone for feature extraction in contrast to the other
three networks which used CNNs. The output of
the depth maps from this network is expected to have
better predictions around object boundaries and re-
tain its accuracy with varying input resolutions. How-
ever, this network’s variations have a large number of
parameters (more than 110M), and thus might yield
slower inference times.
4 RESULTS AND DISCUSSION
To evaluate a depth estimation model’s performance,
(Eigen et al., 2014) proposed a commonly utilized
evaluation method, which uses the following five
evaluation indicators to test the model’s overall accu-
racy, Root Mean Square Error (RMSE), RMSE-log,
Absolute Relative difference (AbsRel), Squared Rel-
ative difference (SqRel) and the Accuracies. These
metrics are used to compare the models’ accuracy on
the KITTI(Eigen split) benchmark.
RMSE =
s
1
|
T
|
T
∑
i=1
d
i
− d
∗
i
2
(1)
RMSELog =
s
1
|
T
|
T
∑
i=1
log(d
i
) − log (d
∗
i
)
2
(2)
AbsRel =
1
|
T
|
T
∑
i=1
d
i
− d
∗
i
d
∗
i
(3)
SqRel =
1
|
T
|
T
∑
i=1
d
i
− d
∗
i
2
d
∗
i
(4)
Comparing Monocular Camera Depth Estimation Models for Real-time Applications
675
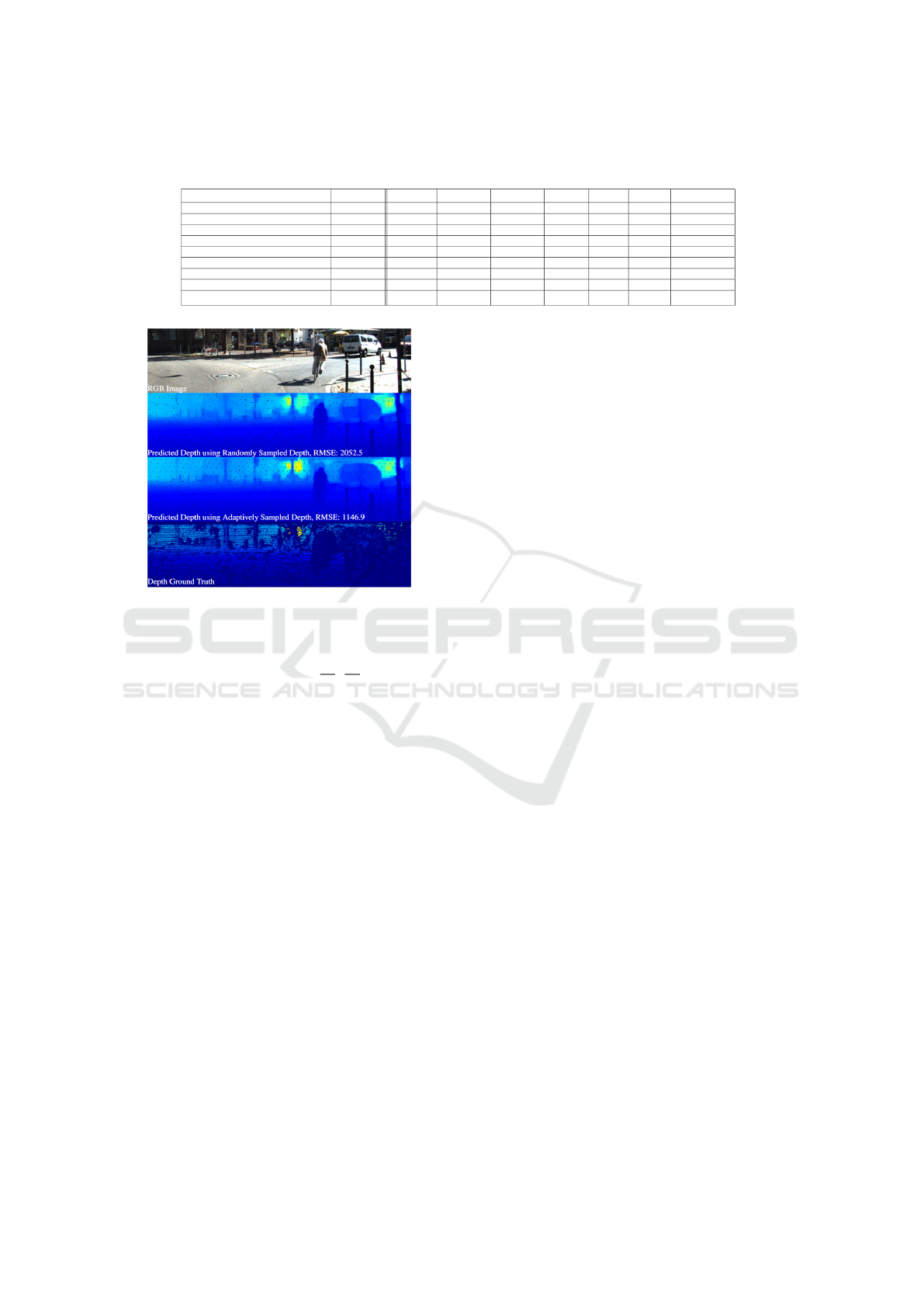
Table 1: Results of evaluating the different models on the KITTI (Eigen Split) Benchmark. The maximum depth is set to 80
for all networks. (↓) denotes a lower is better metric, while (↑) denotes a higher is better one.
Network No. Params δ < 1.25 ↑ δ < 1.25
2
↑ δ < 1.25
3
↑ AbsRel ↓ SqRel ↓ RMSE ↓ RMSE −log ↓
Adabins (Bhat et al., 2020) 78M 0.964 0.995 0.999 0.058 0.190 2.360 0.088
LapDepth(Song et al., 2021) 73M 0.962 0.994 0.999 0.059 0.212 2.446 0.091
DPT-Hybrid (Ranftl et al., 2021) 123.0M 0.959 0.995 0.999 0.062 0.226 2.573 0.092
BTS-ResNet-50 (Lee et al., 2019) 49.6M 0.954 0.992 0.998 0.061 0.250 2.803 0.098
BTS-ResNet-101 (Lee et al., 2019) 68.6M 0.954 0.992 0.998 0.061 0.261 2.834 0.099
BTS-ResNext-50 (Lee et al., 2019) 49.1M 0.954 0.993 0.998 0.061 0.245 2.774 0.098
BTS-ResNext-101 (Lee et al., 2019) 112.9M 0.956 0.993 0.998 0.059 0.241 2.756 0.096
BTS-DenseNet-121 (Lee et al., 2019) 21.3M 0.951 0.993 0.998 0.063 0.256 2.850 0.100
BTS-DenseNet-161 (Lee et al., 2019) 47.1M 0.955 0.993 0.998 0.060 0.249 2.798 0.096
Figure 1: A demonstration of a qualitative result from (Dai
et al., 2021) showing the result with a high RMSE and a low
RMSE.
Accuracies = % o f d
i
s.t. max(
d
i
d
∗
i
,
d
∗
i
d
i
) = δ < thr
(5)
Where T denotes total number of pixels with
ground truth depth, d
∗
i
represents the ground truth
value of pixel i, and d
i
is the predicted depth of that
same pixel. Finally, thr signifies the threshold, and is
usually set to 1.25, 1.25
2
, and 1.25
3
for evaluation.
Each of the functions mentioned above evalu-
ates the model in a different aspect than the others.
Equation 1 calculates the Root Mean Squared Error
(RMSE), which refers to the standard deviation of the
residuals. An example of the varying RMSE can be
seen in Fig. 1 as demonstrated in (Dai et al., 2021).
Similarly, the equation in 2 performs the standard
deviation, but the use of log makes it less affected
by large valued outliers which can explode the error
term to a very large number. Equation 3 of the ab-
solute relative error refers to the % of inaccuracy be-
tween the output and the input (×100 to get actual %).
Equation 4 is similar to equation 3, but the effect of
outliers is more exaggerated here. Equations 1, 2, 3,
and 4 are all lower-is-better metrics, which means
that a lower value for that metric indicates better re-
sults. Finally the equation in 5 refers to the % of
pixels that satisfy the threshold equation, and is used
to indicate the amount of pixels with small (δ < 1.25),
medium (δ < 1.25
2
), and large (δ < 1.25
3
) difference
from their ground truth values. Naturally, a higher-is-
better comparison is used for the accuracies metric.
4.1 KITTI(Eigen Split) Benchmark
Results
Table 1 lists the results of the models’ evaluation re-
sults on the KITTI (Eigen Split) benchmark (Geiger
et al., 2012), based on the five metrics mentioned in
the previous section. It is evident that the Adabins
(Bhat et al., 2020) network outperforms the other net-
works on all metrics across the board. However, this
alone does not qualify it to be the network of choice,
since accuracy is not the only value used to assess the
models.
It should also be noted that all of these net-
works were trained or fine-tuned on the KITTI dataset
(Geiger et al., 2012) which they are being evaluated
on. Meaning that, in a live testing scenario, or while
testing on different data-sets (known as zero-shot
evaluation), the networks would likely score slightly
worse on the same evaluation metrics. The level of
accuracy degradation is proportional to how differ-
ent the input is from the KITTI dataset standard in
terms of input spatial resolution, lighting, scenery,
etc. The DPT-Hybrid (Ranftl et al., 2021) network
would likely suffer less degradation than the others
due to the following reasons:
The DPT (Ranftl et al., 2021) network was trained
on extra datasets other than the KITTI (Geiger et al.,
2012) dataset. This gives DPT an advantage when
performing evaluation on datasets it wasn’t trained on
(zero-shot evaluation), since it has seen a larger cor-
pus of data and is more generalized. This is especially
observable when comparing infinite distance points
such as the sky. Networks trained on only the KITTI
dataset used a lidar pointcloud for their training, and
lidar can not capture infinite distances. Consequently,
the network is confused as to what to predict for these
infinity points and a seemingly random prediction is
given to the corresponding pixels.
An additional side-effect to the absence of labels
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
676

Figure 2: A demonstration of the weight corrosion in the top
parts of the BTS and LapDepth networks. Which is due to
the absence of infinite depth point labels for the sky during
training.
in the top part of the image (sky pixels), is that net-
works do not know how to train the weights respon-
sible for predicting pixels in that part. As a cause of
this, a visible ambiguous artifact is constantly shown
in the output near the top of the image. Both the BTS
(Lee et al., 2019) and Lap Depth (Song et al., 2021)
networks’ outputs suffer from this problem, and an
example of their weight corrosion is shown in Fig-
ure 2. On the other hand, DPT (Ranftl et al., 2021)
can handle these infinite depth points and give a cor-
rect prediction for them most of the time.
4.2 Inference Speed
To have a robust system that can perform camera-
based depth estimation as well as obstacle avoid-
ance and Simultaneous Localization And Mapping
(SLAM), it needs to be able to assess the environment
and any minor changes in it in real-time. Addition-
ally, it is essential to do this on devices that are not
going increase the cost of hardware significantly for
autonomous vehicle manufacturers.
To ensure these constraints are met, the nine
models’ performance were tested on the same hard-
ware. A PC with an i7-8800K, 32 GB of Memory
and 2 different GPU configurations. For a medium-
range Graphics Processing Unit (GPU), a Nvidia
GTX 1080Ti was used. For a higher-end GPU, the
Nvidia RTX 3090 was used. Their respective perfor-
mance results are shown in Tables 2, and 3.
To calculate this data the models ran over a series
of 849 frames, and calculate the frames per second
(fps) from that as (
849
total time taken
). Naturally, the time
of loading the models into the RAM and any other
processing time was not added to the timer, since it
is intended to run these models over large periods of
time on autonomous vehicles. Full resolution is de-
fined to be the KITTI (Geiger et al., 2012) dataset’s
base resolution at 1216 × 352. Moreover, half reso-
lution is set to be 608 × 352, meaning that only the
width of the input is halved. This is because most
of the networks in this work’s comparison do not ac-
cept height values less than 352 as input. The Ab-
sRel metric value of each network was also included
to indicate their overall accuracy. Last but not least,
the number of trainable parameters (No. Params) for
each model is included since there is some correlation
between it and the inference speed.
It has been noticed that there is no direct corre-
lation between the type of network used and the fps
performance of the models. Instead, it is more likely
that the fps performance is reliant on the number of
parameters used by the network as well as its opti-
mization and the parallelization of its weights.
Finally, it is noted that the BTS (Lee et al., 2019)
network’s encoder variations seem to be dominant in
this competition, with the exception of BTS-ResNext-
101, which suffers from its large number of parame-
ters. The BTS-DenseNet-161 variation of the network
is praised with its great balance of accuracy and speed
nearing 10 fps on the medium range GPU at full res-
olution with only a 2% loss in overall accuracy from
the state-of-the-art.
4.3 Visual Comparison
In this section, qualitative analysis of the outputs of
the four networks is performed. Figure 3 shows exam-
ples of the network outputs, with the maximum depth
set to 80 meters for all networks.
It can be observed that all four networks perform
the given task very well, and that they are in fact able
to detect obstacles within the scene. The Adabins
(Bhat et al., 2020) network seems to be very confident
in its predictions. The LapDepth (Song et al., 2021)
network’s prediction is similarly good, but seems to
not have as confident predictions around smaller ob-
jects such as human heads and hands, as well as tree
boundaries.
The DPT (Ranftl et al., 2021) network on the other
hand has a solid output. This network’s output is
performs adequately around object boundaries, which
is due to the fact that the input data retains its size
throughout the entire network pipeline, and therefore
fine-grained details are not lost. Additionally, the ex-
tra data it was trained on allows it to predict depth at
infinite depth points better than the other networks.
The BTS (Lee et al., 2019) network has an output
that, while not ideal, is able to detect any obstacles in
view, and can do this at significantly higher fps count
than all other networks. For the BTS network’s ex-
amples in Figure 3, the DenseNet-161 encoder based
variation was used, because it has a compromise be-
tween accuracy and speed, and it is recommended by
Comparing Monocular Camera Depth Estimation Models for Real-time Applications
677
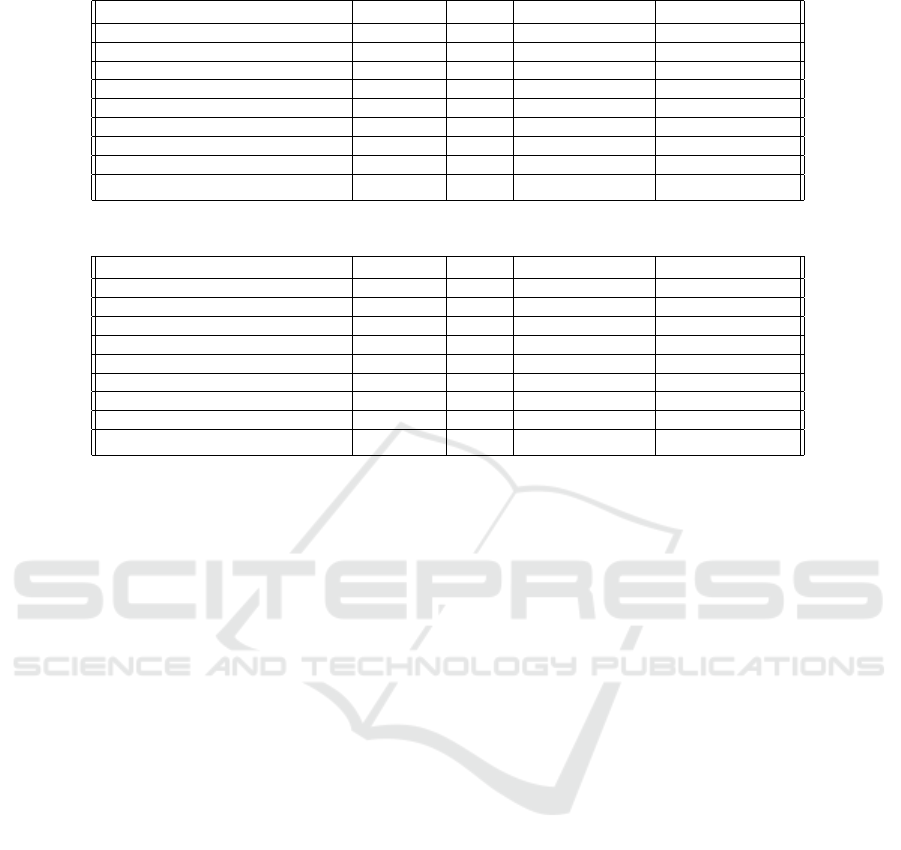
Table 2: FPS comparison of all nine networks’ fps performances using a medium budget GPU (Nvidia GTX 1080Ti).
Network No. Params AbsRel fps (full resolution) fps (half resolution)
Adabins (Bhat et al., 2020) 78M 0.058 4.16 7.03
LapDepth(Song et al., 2021) 73M 0.059 3.75 6.04
DPT-Hybrid (Ranftl et al., 2021) 123.0M 0.062 2.96 5.56
BTS-ResNet-50 (Lee et al., 2019) 49.6M 0.061 12.54 18.40
BTS-ResNet-101 (Lee et al., 2019) 68.6M 0.061 10.90 15.46
BTS-ResNext-50 (Lee et al., 2019) 49.1M 0.061 7.93 13.75
BTS-ResNext-101 (Lee et al., 2019) 112.9M 0.059 2.26 4.66
BTS-DenseNet-121 (Lee et al., 2019) 21.3M 0.063 12.01 17.00
BTS-DenseNet-161 (Lee et al., 2019) 47.1M 0.060 9.46 14.08
Table 3: FPS comparison of all nine networks’ fps performances using a higher budget GPU (Nvidia RTX 3090).
Network No. Params AbsRel fps (full resolution) fps (half resolution)
Adabins (Bhat et al., 2020) 78M 0.058 9.28 12.69
LapDepth(Song et al., 2021) 73M 0.059 5.77 9.034
DPT-Hybrid (Ranftl et al., 2021) 123.0M 0.062 10.11 15.13
BTS-ResNet-50 (Lee et al., 2019) 49.6M 0.061 15.99 20.92
BTS-ResNet-101 (Lee et al., 2019) 68.6M 0.061 13.71 17.80
BTS-ResNext-50 (Lee et al., 2019) 49.1M 0.061 16.36 20.61
BTS-ResNext-101 (Lee et al., 2019) 112.9M 0.059 11.41 15.59
BTS-DenseNet-121 (Lee et al., 2019) 21.3M 0.063 15.02 18.37
BTS-DenseNet-161 (Lee et al., 2019) 47.1M 0.060 10.83 14.52
the authors of the BTS paper. The variance of the out-
puts from each other is very small overall, but is still
visible nonetheless.
4.4 Real Time Testing
4.4.1 Electing a Network
From the combined results of Sections 4.1, 4.2, and
4.3, it is concluded that the BTS network gives the
highest performance results in terms of speed, with a
slight compromise in accuracy compared to the oth-
ers, but a sufficiently comprehensible output none-
the-less in the case of this work. Therefore this net-
work is selected to be the one the framework will be
built around, and used in the real-time test-drive situ-
ation with the limitations that this challenge incurs.
The flexibility of the BTS network when it comes
to choosing the encoder is also a great added fea-
ture to using this network. This allows easy switch-
ing between encoder networks, to be able to choose
whichever one is appropriate for the task at hand.
4.5 Framework Implementation
4.5.1 Overall Framework Description
To be able to test the mentioned depth estimation net-
works, a Logitech C922 camera was attached to the
Self-Driving Car Lab prototype. The frames are fed
to the BTS model, which is determined in Subsec-
tion 4.4.1 to be the best model for the real-time testing
in this work. A simple python framework was made
to handle the model loading for the chosen encoder
of choice (BTS comes with 6), as well as any resiz-
ing, cropping or data augmentation necessary. The
encoder weights are loaded from the pre-trained im-
plementations available on the original BTS online
repository (Lee et al., 2019). A simplistic graphic
user interface is implemented to show the depth es-
timation output, and the original image side-by-side
for comparison, in addition to a fps counter to show
the number of frames the model outputs every sec-
ond. Example outputs of this framework are shown in
Figure 4
4.5.2 Improving the Output
The results of changing the maximum depth attribute
were tested by setting the maximum depth to { 30,
50, 80 } then visually analysing the output. There
was no notable difference between the outputs while
testing. The main difference between them was in the
pixel intensity of nearby objects in the depth maps
produced by shorter ranged settings, which is caused
by normalizing the output depth on a tighter range.
The maximum depth was set to be 80 meters for all
tests, which is the default setting.
4.6 Night Time Tests
In order for depth estimation to operate in a robust
manner, they have to perform well under difficult
weather conditions as well as poor lighting conditions
such as night time and shadows. Currently, these are
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
678
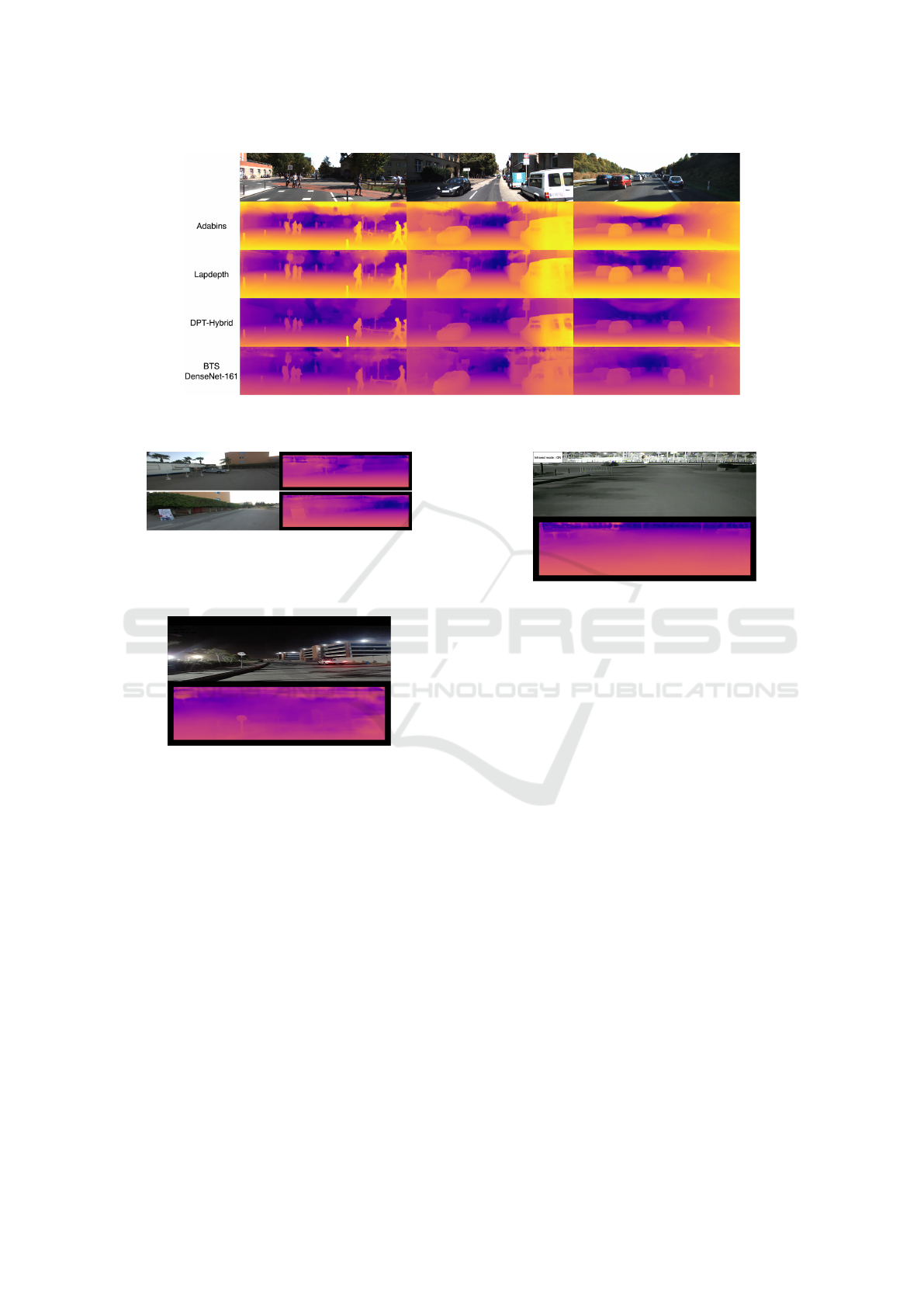
Figure 3: Comparison of the four contending networks on challenging images sampled from the KITTI (Geiger et al., 2012)
dataset’s validation set. The images are labelled according to the network used.
Figure 4: Real-time captured examples of the output of the
depth estimation framework proposed in this work while us-
ing the BTS-DenseNet-161 network option for predicting
the depth.
Figure 5: Prediction of depth estimation model using a nor-
mal HD monocular camera with no extra processing under
sufficient lighting conditions at night time.
the largest challenges that face systems that are en-
tirely based on cameras. It has been found that the
network can still perform somewhat accurate predic-
tions when sufficient lighting is found, and an exam-
ple of this is shown in Figure 5. However, in low illu-
mination conditions, the network’s output lacks useful
features that can correctly represent the scene.
To try and counter this problem, a HIKVISION 2
Megapixel Infra-Red Camera that would be tradition-
ally used for surveillance was utilised. This camera
would output an RGB colored image when sufficient
lighting is present, then as soon as the lighting fades,
it automatically switches to Infrared mode. The out-
put of Infrared mode is a black and white image of the
same dimension as the RGB output.
The build framework was utilized for testing
again, but this time it was given the infrared camera
Figure 6: Top: input black and white image from infrared
camera. bottom: network prediction.
feed as input. The output of the network is quali-
tatively worse than the normal performance of day-
time testing. This is attributed to the network not be-
ing trained to handle the gray-scale images input to
it when the infrared mode is on, and therefore all the
predictions that relied on color information such as
color gradients are now lost. An example of the net-
work’s output with the Infrared mode on is shown in
Figure 6.
The results of the night vision approach seemed to
slightly improve the depth estimations results. How-
ever, there is room for improvement in this approach
which can yield a more robust night time perfor-
mance.
5 CONCLUSIONS
In this paper, the four highest bench-marked networks
on the KITTI (Eigen split) benchmark were explained
and their performance was compared quantitatively
and qualitatively. The BTS network was chosen as the
core of the real-time framework we implemented, as it
has the best compromise between speed and accuracy.
This framework was tested over several test-drives,
encompassing different lighting conditions. The ac-
curacy of the output is seemingly adequate for pro-
Comparing Monocular Camera Depth Estimation Models for Real-time Applications
679

ducing prototypes of practical applications.
Future work for monocular depth video applica-
tions could address problems like flickering frames
and scale variance in a real-time manner. Addition-
ally, it would be interesting to add network function-
ality to predict infinite distance points and mask out
the sky. Another approach to be investigated would
be to see if training a network for gray-scale image
depth prediction would lead to better results with the
infrared-mode output at night.
REFERENCES
Baig, M. H. and Torresani, L. (2016). Coupled depth learn-
ing. In 2016 IEEE Winter Conference on Applications
of Computer Vision (WACV), pages 1–10.
Bhat, S. F., Alhashim, I., and Wonka, P. (2020). Ad-
abins: Depth estimation using adaptive bins. CoRR,
abs/2011.14141.
Casser, V., Pirk, S., Mahjourian, R., and Angelova,
A. (2018). Depth prediction without the sensors:
Leveraging structure for unsupervised learning from
monocular videos.
Choi, S., Min, D., Ham, B., Kim, Y., Oh, C., and
Sohn, K. (2015). Depth analogy: Data-driven ap-
proach for single image depth estimation using gradi-
ent samples. IEEE Transactions on Image Processing,
24(12):5953–5966.
Ciubotariu, G., Tomescu, V.-I., and Czibula, G. (2021).
Enhancing the performance of image classification
through features automatically learned from depth-
maps. In International Conference on Computer Vi-
sion Systems, pages 68–81. Springer.
Dai, Q., Li, F., Cossairt, O., and Katsaggelos, A. K. (2021).
Adaptive illumination based depth sensing using deep
learning. arXiv preprint arXiv:2103.12297.
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network.
Furukawa, R., Sagawa, R., and Kawasaki, H. (2017). Depth
estimation using structured light flow — analysis of
projected pattern flow on an object’s surface. In 2017
IEEE International Conference on Computer Vision
(ICCV), pages 4650–4658.
Garg, R., BG, V. K., Carneiro, G., and Reid, I. (2016). Un-
supervised cnn for single view depth estimation: Ge-
ometry to the rescue.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for autonomous driving? the kitti vision benchmark
suite. In 2012 IEEE Conference on Computer Vision
and Pattern Recognition, pages 3354–3361.
Godard, C., Aodha, O. M., and Brostow, G. J. (2017). Un-
supervised monocular depth estimation with left-right
consistency.
Hoiem, D., Efros, A. A., and Hebert, M. (2007). Recovering
surface layout from an image. International Journal
of Computer Vision, 75(1):151–172.
Hoyer, L., Dai, D., Chen, Y., Koring, A., Saha, S., and
Van Gool, L. (2021). Three ways to improve semantic
segmentation with self-supervised depth estimation.
In Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition, pages 11130–
11140.
Konrad, J., Wang, M., Ishwar, P., Wu, C., and Mukherjee,
D. (2013). Learning-based, automatic 2d-to-3d image
and video conversion. IEEE Transactions on Image
Processing, 22(9):3485–3496.
Ladicky, L., Shi, J., and Pollefeys, M. (2014). Pulling things
out of perspective. pages 89–96.
Lee, J. H., Han, M., Ko, D. W., and Suh, I. (2019). From big
to small: Multi-scale local planar guidance for monoc-
ular depth estimation. ArXiv, abs/1907.10326. Ac-
cessed: 2021-07-20.
Mahjourian, R., Wicke, M., and Angelova, A. (2018). Un-
supervised learning of depth and ego-motion from
monocular video using 3d geometric constraints.
Pillai, S., Ambrus, R., and Gaidon, A. (2018). Superdepth:
Self-supervised, super-resolved monocular depth esti-
mation.
Ranftl, R., Bochkovskiy, A., and Koltun, V. (2021). Vision
transformers for dense prediction. ArXiv preprint.
Saxena, A., Chung, S. H., and Ng, A. Y. (2005). Learning
depth from single monocular images. NIPS 18.
Song, M., Lim, S., and Kim, W. (2021). Monocular depth
estimation using laplacian pyramid-based depth resid-
uals. IEEE Transactions on Circuits and Systems for
Video Technology, pages 1–1.
Yang, Z., Wang, P., Wang, Y., Xu, W., and Nevatia, R.
(2018). Lego: Learning edge with geometry all at
once by watching videos.
Yang, Z., Wang, P., Xu, W., Zhao, L., and Nevatia, R.
(2017). Unsupervised learning of geometry with edge-
aware depth-normal consistency.
Yin, Z. and Shi, J. (2018). Geonet: Unsupervised learning
of dense depth, optical flow and camera pose.
Zhou, T., Brown, M., Snavely, N., and Lowe, D. G. (2017).
Unsupervised learning of depth and ego-motion from
video.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
680
