
Industrial and Automation Control System Cyber Range Prototype for
Offensive Capability Development
Austris Ulj
¯
ans
1
and Bernhards Blumbergs
2 a
1
Vidzeme University of Applied Sciences, Cesu Str. 4, Valmiera LV - 4200, Latvia
2
IMCS UL, CERT.LV, Raina Blvd. 29, Riga, LV-1459, Latvia
Keywords:
Industrial Automation, Cyber Range, Offensive Cyberoperations.
Abstract:
Industrial and automation control systems (IACS) are broadly utilized in sectors, such as manufacturing pro-
cesses control and energy transmission. Attacks on these systems may have devastating effects. Moreover,
current IACS systems are interconnected with conventional IT infrastructures thus increasing potential ad-
versary access to industrial systems. This research describes and offers a prototype for a realistic and easily
reproducible IACS cyber range for offensive exercise development. An extensive study of various techni-
cal aspects and scenarios of existing IACS cyber ranges is conducted to create the knowledgebase for such
range development. Created IACS cyber range use is validated by conducting practical offensive capability
development training for a target audience. This work concludes, that IACS cyber ranges are a viable tool for
understanding and developing offensive tactics and techniques used to gain access to the IACS network and
damage physical processes.
1 INTRODUCTION
The digital world nowadays is rapidly expanding with
having significant impact on human society. This
also applies to IACS systems, which provide efficient
automation and operation of critical infrastructures
(CI), such as, electrical grids, gas distribution grids,
water treatment, transportation, and heating plants.
IACS systems are typically characterized by pro-
prietary protocols, isolated networks, and purpose-
specific hardware, which have started to close the gap
between traditional IT systems with related elements,
networks, and ideologies. This has made IACS a
target to various adversaries, especially due to rapid
expansion towards industrial IoT devices, which fur-
ther increase the attack surface. IACS receive an in-
creasing number of sophisticated and debilitating at-
tacks (CISA, 2021; Geng et al., 2019; Kaspersky Lab,
2021a) from organized crime and nation-state affili-
ated actors (FireEye, 2021; MITRE, 2021).
There is little reported information about actual
attacks on industrial infrastructure or scenarios exe-
cuted by adversaries, despite the growing awareness
of IACS cybersecurity (Zhu et al., 2011). To in-
crease understanding and discover vulnerabilities in
a
https://orcid.org/0000-0001-9679-6282
IT infrastructure, researchers create testbeds and cy-
ber ranges (CR) to test the attack and defense mech-
anisms in a controlled environment. Publication (Kr-
ishnan and Wei, 2019) indicates that there is a lack
of existing research on IACS cyber ranges, there-
fore making them less accessible to the broader com-
munity to gain more experience in the defense and
offense of related components. Offensive capabili-
ties are deliberate invasions into opponent systems to
cause destruction, disruption, or damage. Research
(Lewis, 2015) draws attention to how the lack of an
utter offensive cyber capability affects NATO’s abil-
ity to deter and defend. Therefore, offensive capabil-
ities need to be developed as adversaries cannot be
refuted by pure defense. In the author’s opinion, the
point is valid for any national state entity. However,
national state’s cybersecurity exercises are focused on
defense, where immediate attention is to train blue
team’s defense response on red team’s attacks. Thus,
exercises improving the readiness of red team’s offen-
sive capabilities are limited in scope and mostly not
public. This signifies the need for an open and well-
documented CR to allow a better understanding and
wider development of offensive capabilities.
This paper addresses the problem in the field of
cyber red team’s offensive capability development.
Only some of the NATO nations have publicly ex-
478
Ulj
¯
ans, A. and Blumbergs, B.
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development.
DOI: 10.5220/0010879500003120
In Proceedings of the 8th International Conference on Information Systems Security and Privacy (ICISSP 2022), pages 478-490
ISBN: 978-989-758-553-1; ISSN: 2184-4356
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

pressed limited information on possessing offensive
capabilities (Gold, 2020; Muller, 2019; UK Gov-
ernment, 2016). Such capability development might
be as a response to a steadily growing cyber at-
tacks attributed to nation-state actors (Kaspersky Lab,
2021b). Thereby the problem addressed in this pa-
per is that red team offensive capabilities in the IACS
field are yet to be closely studied to gain a deeper
insight into how IACS elements can be attacked and
defended. Current studies mainly focus on defensive
capability development in the IACS field, due to de-
velopment of blue team defenses to counter adversary
attacks as presented in section 2. Additionally, offen-
sive capabilities may be used to respond to aggressors
with proportional measures. Offensive capability de-
velopment is necessary both for private and public en-
tities operating or depending on IACS, as they need to
know how to test and protect their infrastructure.
The main objective and novelty of this research is
aimed towards development of the IACS CR, where
the red team can practice developing offensive ca-
pabilities, encompassing the following key aspects:
1) realistic, 2) easily reproducible, 3) with publicly
available documentation, and 4) supporting multi-
stage attack scenarios. The created CR prototype
may be used to develop exercises for evolving red
team offensive capabilities within IACS field, thereby
improving understanding of related tactics and tech-
niques, and utilizing CR for exercises to develop both
defensive and offensive capabilities by any suitable
means.
This research addresses identified gaps within cur-
rent IACS CR approaches and use-cases (section 2.1).
Moreover, the created CR encompasses the minimal
investments of resources, ease of replication, open-
source paradigm, publicly available documentation,
and complexity to perform realistic offensive multi-
stage attack scenarios. The main contributions of this
research are:
1. Comprehensive literature analysis of current rele-
vant IACS testbeds;
2. Core concepts and approaches for IACS CR pro-
totype design and implementation.
This paper prototypes an IACS cyber range for
practical offensive cyber capability development,
Section 2 provides literature analysis of related work
and summarizes the outcomes; Section 3 identifies
and presents cyber range development and training
scenario requirements; Section 5 offers the results of
cyber range training use case; and Section 6 provides
conclusions and future work directions.
2 RELATED WORK AND CYBER
RANGE REVIEW
To identify related work, the following keywords and
their combinations were used: IACS, ICS, SCADA,
testbed, cyber range, training, offensive cyber oper-
ations. As the IACS field develops quickly, a pri-
mary period of the last five years was chosen as an
optimal time frame for relevant literature identifica-
tion. Searches were conducted in Google Scholar,
Scopus, IEEE scientific databases and indexes, and
public search engines. Research eligibility criteria
was based on the direction towards CR creation or re-
view of industrial CRs.
IACS elements are distributed in operational tech-
nology (OT) network with a difference between con-
ventional information technology (IT) systems being
minimal delays for time-critical processes. Research
(Zhou et al., 2018) mentions that the key difference
between IT and OT is that OT includes multiple em-
bedded operating systems, which use field-specific
proprietary protocols. OT networks rely on real-time
data round-trips and interruption in these communi-
cations can cause operational, financial, and physical
losses. Research (Holm et al., 2015) points out that
due to the high availability requirements of IACS, se-
curity tests are strongly not advised to be performed
on a live system. For this reason, researchers, corpo-
rations, and military institutions turn to cyber ranges
that mimic real IACS.
The core control elements in a cyber-physical sys-
tem include at least a programmable logic controller
(PLC), human-machine interface (HMI), and super-
visory control and data acquisition (SCADA). A PLC
being a programmable device performs logical oper-
ations for a physical process based on received exter-
nal inputs. To visualize the control process a multi-
purpose HMI or SCADA is used to allow an operator
to supervise and interact with a physical process. All
of these systems are either managed or installed from
a general-purpose computer or server, which increase
the attack surface (Larrucea and Molinuevo, 2020).
2.1 Overview of Current IACS Cyber
Ranges
Publication reviewing the development in IACS at-
tacks (Larrucea and Molinuevo, 2020) states that de-
veloping cyber-security competencies through the use
of CR and their use for research topics is of increasing
interest. Also, CRs are a vital tool for exploring and
modeling vulnerabilities, and producing viable data
sets that enable testing security solutions as novel ar-
chitectures, intrusion detection systems, and attacks
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development
479
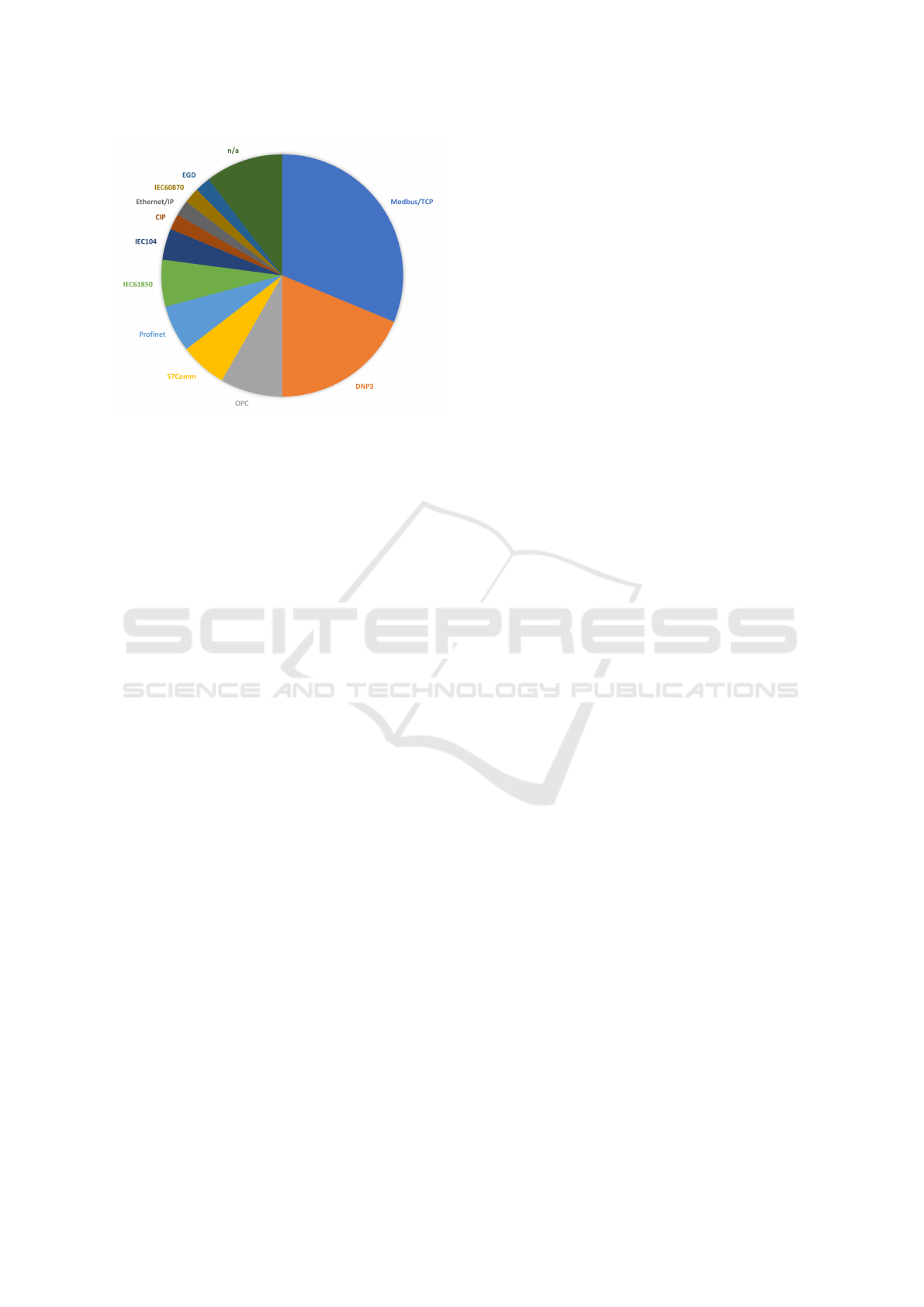
Figure 1: Overview of industrial protocols used in CR
testbeds listed in table 1.
against infrastructure. While performing the litera-
ture review, 28 created testbeds were identified in the
relatively new research. These testbeds are indicated
in table 1.
Table 1 shows that half of the CR testbeds are cre-
ated in the USA, with the rest being scattered across
Europe and Asia. However, in recent years, the num-
ber of CRs and testbeds is increasing in Europe and
Asia. Such increase may be explained by the rise
of overall governmental and industry interest due to
the emergence of global cyber-powers and acceler-
ating integration and merger of OT and IT systems
with the raise of industry 4.0. Based on the assess-
ment, IACS CR typical applications include electrical
generation plants, the chemical and oil industry, water
and wastewater management, nuclear power stations,
and the manufacturing industry. The primary industry
created in CRs is energy transmission and generation.
This may be reasoned, that the energy sector is one of
the most obvious targets for adversaries due to the na-
tion’s critical dependency on the electrical power sup-
ply. Additionally, research using an electrical grid can
more easily emphasize the gravity of cyberattacks. It
may be observed, that one of the most common ven-
dors used in physical IACS cyber ranges across mul-
tiple studies are Siemens and Allen-Bradley, which
may be explained due to these vendors being present
in worldwide markets and across a huge share of in-
dustries.
Furthermore, very few of the physical cyber
ranges in table 1 publicly share a detailed docu-
mentation of the system, making it hard to validate
or replicate the research. Publication (Green et al.,
2017) note that making the testbed more open for re-
searchers extends its usability, and it should be taken
into account when designing such testbeds.
Important part of the IACS system lies within
ensuring effective and interoperable communications
between the control elements. To achieve this,
TCP/IP-based communication protocol usage is be-
coming more prevalent, which also broadens the over-
all attack surface of IACS. Figure 1 provides the
overview of the used protocols within the assessed
CR testbeds. It is shown that one of the most used
protocols in cyber ranges across multiple fields of
IACS is Modbus/TCP, followed by DNP3, OPC, and
s7comm. Modbus/TCP has been adapted worldwide
due to its open specification, available documentation,
and community support. DNP3 is an open and public
protocol standard primarily used in electric and water
utilities in the USA. S7comm is a Siemens proprietary
protocol used in communication between PLCs of the
Siemens S7-300/400/1200/1500 family. OPC is a se-
ries of standards and specifications maintained by and
made available to OPC Foundation members, mainly
used for industrial telecommunication in higher-level
management systems, such as, manufacturing, build-
ing automation, oil and gas, and renewable energy.
Testbeds and CRs may be divided by type, pur-
pose, and applicable sector. Sector-wise test-beds
may be divided into academic, military, or commer-
cial. From the perspective of their purpose, CRs may
cover a very wide range of applicability, such as, cy-
ber training, capture the flag events, research and de-
velopment, testing, assessment, and recruitment. Re-
search works, such as (Reaves and Morris, 2012;
Geng et al., 2019), categorize CRs into physical, vir-
tual, and hybrid architectures. Many testbeds hy-
bridize the physical and virtual components to make
a trade-off between fidelity and economy. The major-
ity of assessed research is being done on virtualized
testbeds as they do not require huge investments, are
relatively easy to implement, and re-purpose.
2.1.1 Physical Testbed
Physical testbeds rely on physical hardware and ac-
tual software running on that hardware. Some of the
physical CRs, such as (Adepu et al., 2019; Mathur
and Tippenhauer, 2016) are used to control the ac-
tual physical process containing actuators and sen-
sors. Despite the advantages, most physical CRs use
the hardware-in-the-loop physical system simulation
method, which uses mathematical models to represent
physical processes. There is a lack of exact mathe-
matical models for representing the behavior of sen-
sors and actuators used in monitoring and controlling
the physical devices, however when designing CRs
fulfilling such requirements is not mandatory (Green
et al., 2017).
For example, a physical SWAT CR testbed
(Mathur and Tippenhauer, 2016) consists of a six-
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
480
Table 1: Cyber range overview (Chemical plant - C, Smart Grid - SG, Nuclear plant - N, General - G, Electrical Grid - G,
Transportation - T, Manufacturing - M, Water Treatment - W, V - Virtual CR, P - physical CR, H - hybrid CR, Unspecified -
information not provided by the research, N/A - hardware does not apply to virtual testbeds).
Nr. Name Country Year Field Type Hardware vendor Ref.
1 Unspecified USA 2012 G V N/A (Reaves and Mor-
ris, 2012)
2 Unspecified USA 2017 EG V N/A (Koganti et al.,
2017)
3 Unspecified USA 2016 EG P Unspecified (Korkmaz et al.,
2016)
4 VTET China 2018 C H Siemens (Xie et al., 2018)
5 Unspecified Quatar 2021 C H Siemens (Noorizadeh et al.,
2021)
6 Unspecified USA 2019 N, T P Koyo, RaspberryPi (Stranahan et al.,
2019)
7 Unspecified USA 2017 G P Siemens (Su et al., 2017)
8 MSICST China 2019 G P Siemens, Rockwell,
GE, Schneider
(Tao et al., 2019)
9 Unspecified Portugal 2017 EG V N/A (Rosa et al., 2017)
10 Unspecified USA 2019 C P Koyo, Eaton (Krishnan and Wei,
2019)
11 IOSB Germany 2017 M H Siemens (Pfrang et al., 2017)
12 EPIC Singapore 2019 SG P Pcvue, Wago,
Siemens, SMA,
Hirschmann
(Adepu et al., 2019)
13 Unspecified France 2017 EG P RaspberryPi (Rubio-Hernan
et al., 2017)
14 Unspecified Netherlands 2018 EG V N/A (Chromik et al., 1
06)
15 Unspecified Switzerland 2018 T V N/A (Urdaneta et al.,
2018)
16 Unspecified USA 2021 HVAC V N/A (Werth and Morris,
2021)
17 RICS-el Sweeden 2019 EG V N/A (Almgren et al.,
2019)
18 Unspecified USA 2018 G V N/A (Alves et al., 2018)
19 SWAT Singapore 2016 W P Allan-Bradley’s (Mathur and Tip-
penhauer, 2016)
20 PowerCyber USA 2010 EG V N/A (Hahn et al., 2010)
21 GRFICS USA 2018 C V N/A (Formby et al.,
2018)
22 Unspecified Italy 2010 EG H ABB, OpenPLC (Fovino et al.,
2010)
23 VCSE USA 2011 EG V N/A (Stamp et al., 2011)
24 Unspecified USA 2011 G P GE, PXI, Rockwell’s (Morris et al.,
2011)
25 VPST USA 2009 EG V N/A (Bergman et al.,
2009)
26 TASSCS USA 2011 EG V N/A (Mallouhi et al.,
2011)
27 ICSrange Italy 2019 G V N/A (Giuliano and
Formicola, 2019)
28 SoftGrid Singapore 2016 EG V N/A (Gunathilaka et al.,
2016)
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development
481

stage water treatment process, where each stage is au-
tonomously controlled by a local physical PLC. Phys-
ical CRs have two main drawbacks: 1) difficulty to re-
configure and maintain real hardware and software in
a testbed, especially given the presence of firmware
exploits that have the potential to damage elements,
2) is a financial aspect as physical components used
in CRs may be expensive, hence researchers tend to
use a small amount of core physical components and
augment it with virtualized components. Key advan-
tages of physical CRs include several aspects: 1) pro-
vision of realistic system and environment reaction on
attacks, which would be present in an actual process
control system, 2) realistic communication patterns
and latency, and 3) physical devices with susceptible
to software, firmware, and hardware vulnerabilities,
which are hard, if not possible, to replicate within a
virtual testbed.
2.1.2 Virtualized Testbed
Research (Xie et al., 2018) mentions, that virtualiza-
tion is a straightforward approach to overcome the
disadvantages of physical testbeds. Although the vir-
tual testbed would lose some fidelity, it is more suit-
able for preliminary IACS security research in the
laboratory environment. For example, one of such
virtualized testbeds is GRFIACS framework (Formby
et al., 2018) based on OpenPLC (Alves et al., 2014)
research, which permits the GRFIACS to virtualize
the entire IACS network and related physical pro-
cesses. Main advantages mentioned in (Reaves and
Morris, 2012) are: 1) virtual testbeds are easy to du-
plicate and reproduce, and 2) virtualization provides
a common framework for conducting research, and
sharing the results and the code to the research com-
munity for reproduction and validation.
2.1.3 Hybrid Testbed
Researches, aiming for low cost and maintaining
some fidelity of IACS cyber range, include both phys-
ical and virtual components, thus designing hybrid
testbeds. Such testbeds try to combine the best of
both worlds – virtual and physical, and may employ
physical components, such as, PLCs, HMIs, and other
physical systems, which are hard or practically im-
possible to virtualize or simulate. On the other hand,
system elements like SCADA workstations, data his-
torians, and network infrastructure may be virtual-
ized. An element, such as, SCADA commonly resides
on a MS Windows-based operating system, which
may run in a virtual environment like VMware or Vir-
tualBox. For example, related work (Pfrang et al.,
2017) presents a CR by dividing it into physical and
virtual parts as follows: 1) virtual environment - vir-
tual network components, virtual machines (VMs) for
programming PLCs, VM SCADA servers, attack de-
tection tools, and 2) physical environment - physical
PLCs, industrial actuators, HMIs, and RTUs.
3 CYBER RANGE
DEVELOPMENT
CONSIDERATIONS
CR criteria may change based on objectives, for ex-
ample, research (Formby et al., 2018) has created GR-
FIACS testbed framework, which is intended to help
beginners in IACS security to overcome barriers cre-
ated by the exclusive use of expensive and propri-
etary hardware and software used in IACS. Therefore,
this research offers a novelty through the following
main considerations: 1) modular design permitting to
swap virtual elements with physical ones, 2) low ini-
tial cost, and 3) simple communication protocols for
students to reduce the learning curve. Other related
works (Fovino et al., 2010; Koganti et al., 2017) have
created electrical grid hybrid IACS cyber rages, with
the main objective being to explore the cascading ef-
fects in case of IACS failure with realistic attack sce-
narios and to test novel cyber-attacks. Testbeds like
these require sophisticated simulation of the electri-
cal grid to understand the impact of the attacks, whilst
having a minor emphasis on control system complex-
ity.
This research prototypes a CR with the following
key considerations:
1. Repeatability: an inherent possibility for other re-
searchers to replicate the testbed and build upon
it;
2. Fidelity: the CR requires to reproduce the real
system as accurately as possible, CR has to
present interaction with real IACS components
using real IACS tools, as well as, providing con-
ditions for performing realistic attacks;
3. Physical process interaction: the different IACS
processes may interact with each other not only
through data link but by a physical process, such
as, temperature, vibration, or mechanical motion;
4. Common communication protocols: research
(Green et al., 2017) suggests to choose indus-
trial protocols in accordance with the IACS field,
and country or region represented within the
CR. Common protocols in the industry are Mod-
bus/TCP, Profinet, DNP3, IEC61850, OPC/OPC-
UA, S7comm, and IEC60870-5-104 (IEC104)
(Fig. 1);
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
482

5. Network segmentation: from the perspective of
the CR topology, the research (Green et al., 2017)
indicates that IACS need to be separated in zones
to mimic realistic IACS system, such as, a manu-
facturing zone, demilitarized zone, and enterprise
zone. The same ideology is applied in research
by (Almgren et al., 2019), where a more realistic
environment is created by attaching other IT net-
works to IACS network segments, such as, office
or enterprise networks;
6. Adaptability and flexibility: a capability for re-
configuring the whole testbed by exchanging
components through standardized interfaces me-
chanically, electrically, and from networking in-
frastructure perspective. For this purpose, CR
encompasses common industrial communication
protocols and widely used hardware vendors;
7. CR element selection by market share: compo-
nents are chosen based on common automation
component vendors in the Baltic state region.
In this research, the emulated primary physical
process in the CR prototype is the district heating
plant, which supplies heating to the city. The sec-
ondary control process is the heating plant’s ware-
house management system controlling alarms and
lights. The warehouse is an integral part of the heat-
ing plant support infrastructure. The heating plant and
warehouse are collocated (Fig. 2) and are intercon-
nected in a single communication network. The au-
thors have chosen the heating plant since it may be
considered as a part of the city’s critical infrastructure
and may be valid targets for adversaries. Moreover,
the heating process is relatively easy to implement,
comprehend by the training audience, and understand
the possible negative impact to civilians caused by the
disruption of different physical processes.
4 PRACTICAL
IMPLEMENTATION
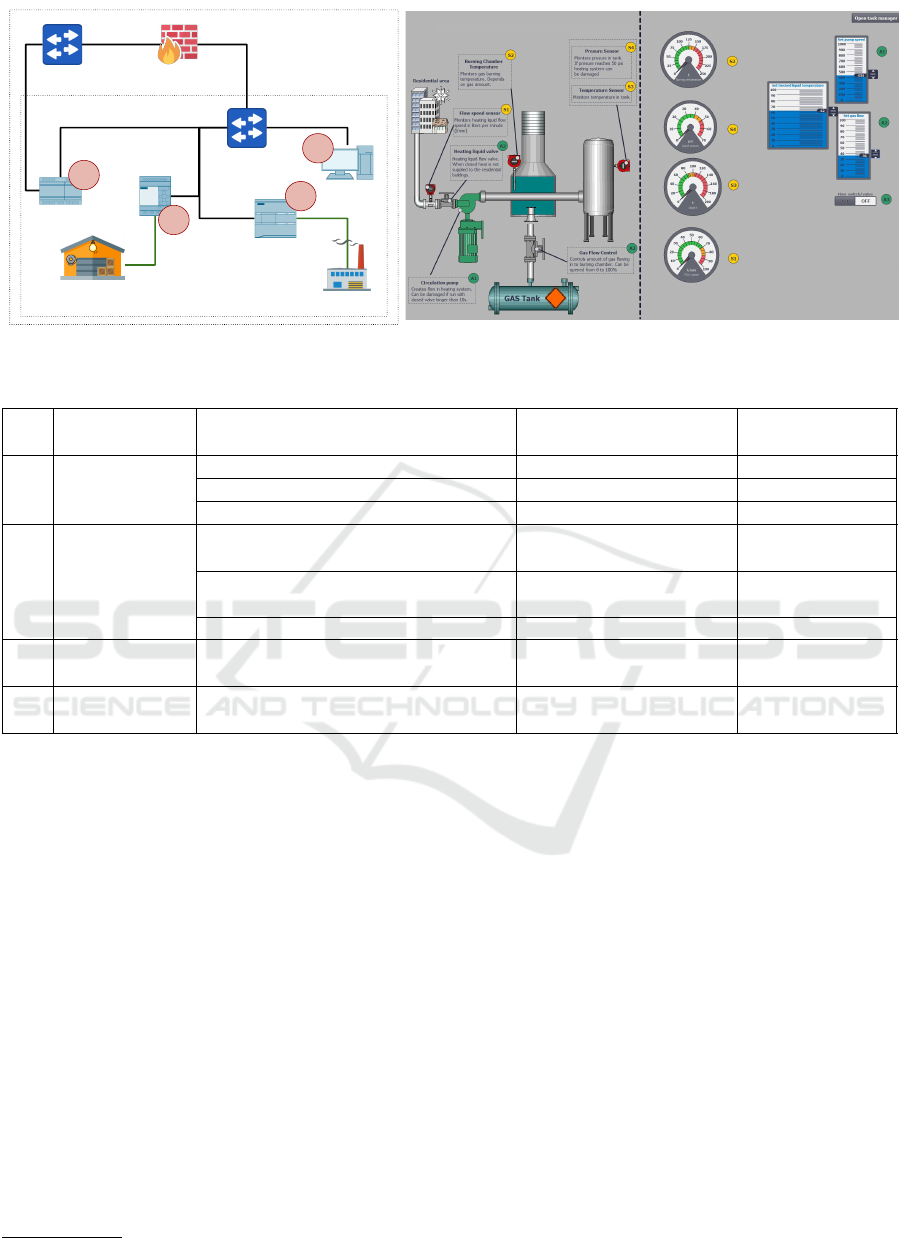
The CR prototype network topology is shown in fig-
ure 2. The system consists of two PLCs (3) and
(4), SCADA (2) and WEB-SCADA (1). This is
divided into supervisory and control systems con-
taining SCADAs, and execution systems containing
PLCs. The following subsections introduce the de-
tailed working principles of each implemented ele-
ments and their communication specifics. The CR
prototype component choices have been based on the
following criteria: 1) supported common industrial
protocols (Fig. 1), 2) vendor popularity (Tab. 1), and
3) estimated average price in Euros (Tab. 2).4
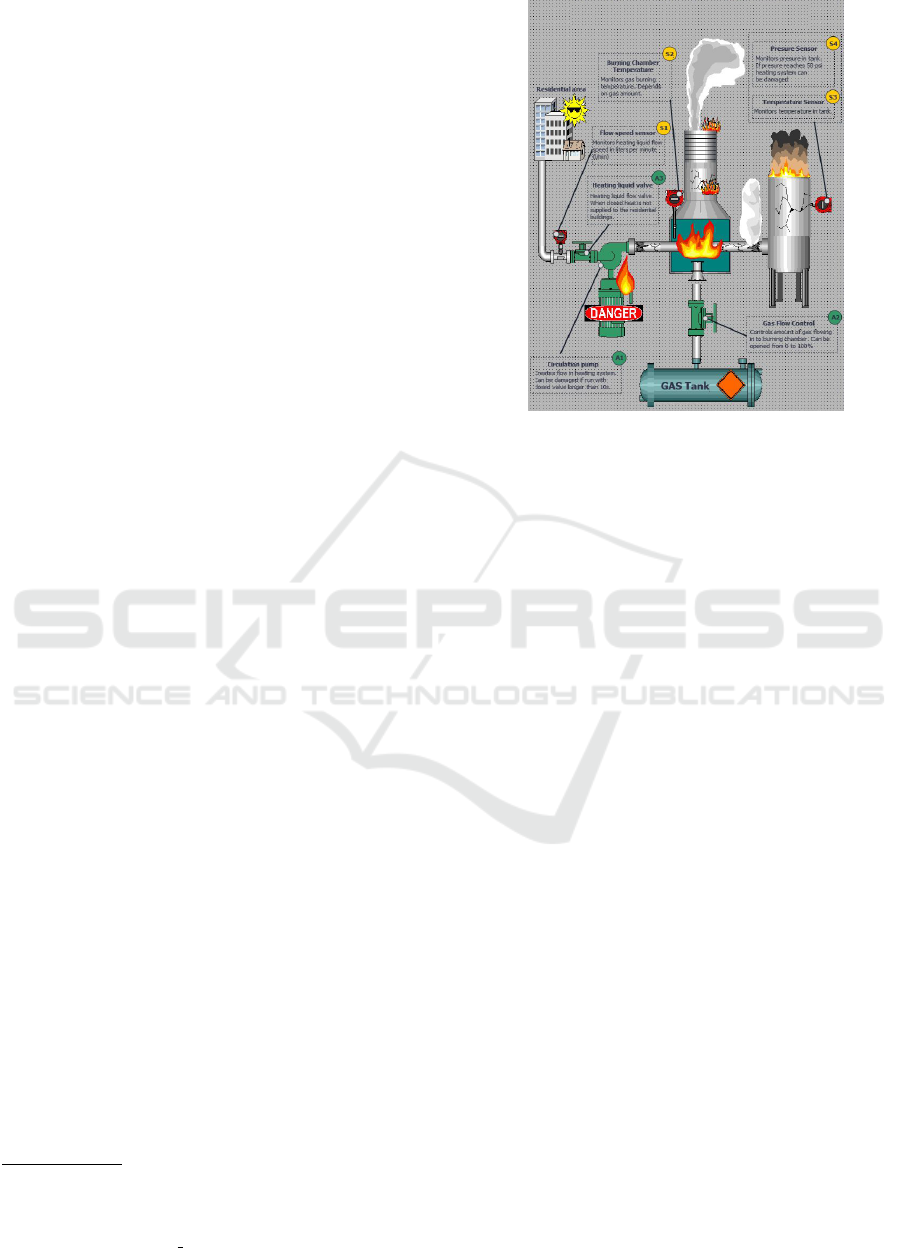
4.1 Heating Process
The heating plant’s SCADA HMI visualization is
shown in figure 3. The virtualized heating plant
consists of circulation pump (A1), transmission line
valve (A3), gas flow valve (A2), tank temperature and
burning temperature sensors (S3, S2), pressure sensor
(S4), and flow speed sensor (S1).
The heating process in the CR prototype is divided
into two phases – 1) the heating of the heat transfer
liquid (HTF), and 2) HTF transmission to the city dis-
tricts:
1. HTF is heated by burning gas in the furnace,
which is then distributed to the rural area. Gas
flow is related to the burning temperature, which
is controlled by gas flow valve A2 (see Fig. 3).
To automate the burning process, an operator sets
a setpoint with the desired fluid temperature level.
The S7-1200 PLC (4) compares setpoint tempera-
ture with the actual heat transfer fluid temperature
at sensor S4. Based on that, S7-1200 PLC con-
trols the gas-burning temperature (S2) by adjust-
ing gas flow controller (A2). This system has been
designed with limits for maximum temperature
and pressure, exceeding these values inflict dam-
age to the heating plant. If temperature or pressure
values reach a set threshold, S7-1200 automation
logic protects the physical system by stopping the
gas flow to safeguard against the damage;
2. The HTF transmission depends on the heating
process. When the temperature of the HTF
reaches 60
◦
C in the transmission line, the circu-
lation pump A1 switches on and heating valve A3
opens. In this phase, heating system is fully op-
erational and heat is delivered to the city districts.
However, this part of the system may be damaged
irreversibly if the circulation pump operates with
the heating liquid valve (A3) closed. It has to be
noted, that the concept of damage in these phases
relates to logical damage from the attack scenario
perspective and no actual damage is inflicted on
the CR elements.
Heating process control logic is handled by
Siemens Simatic PLC S7-1200 (see Fig. 2). CR pro-
totype is built to be easily reproducible with no ad-
ditional hardware, sensors, or actuators attached to
S7-1200. Instead, the physical process is simulated
using the hardware-in-the-loop (HIL) method, which
is based on a simplified model of the heating process.
HIL includes and controls nominal values of the phys-
ical process so that it may be damaged if these values
are exceeded, therefore both the control and HIL pro-
grams run on the same physical device. These pro-
grams are separated so that control logic may only
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development
483
WEB-SCADA
PLC S7-1200
PLC LOGO!8.2
IACS network
SCADA
Enterprise
network switch
Warehouse
management system
Heating plant
Firewall
1
Enterprise network
Switch
3
2
4
Figure 2: The created CR prototype network topology.
Heating system
HTF
Tank
Figure 3: Designed SCADA visualization screen.
Table 2: List of elements and their system description used in CR.
Nr. Element System description MLFB order code Approx. price,
EUR
1 WEB-SCADA
NodeRed V1.0.0 n/a 0,00
Yocta Linux V2.6 n/a 0,00
IOT2040 6ES7647-0AA00-1YA2 210,00
2 SCADA
Siemens, SIMATIC WinCC Ad-
vanced V15.1
6AV2102-0AA05-0AA5 Available as trial
Windows 7 enterprise, SP1, Build
7601
n/a 0,00
VirtualBox V6.0 n/a 0,00
3 PLC LOGO! Siemens, LOGO! 8.2, Full versions:
1.82.02
6ED1052-1FB08-0BA0 100,00
4 PLC s7-1200 Siemens, SIMATIC S7-1200, CPU
1215C
6ES7215-1AG40-0XB0 700,00
interact with heating process simulation as if through
sensors and actuators (Fig. 3). For this reason, part of
the controller responsible for physical system simula-
tion is off-limits for the CR participants. PLC pro-
gram is structured in two parts. The first contains
control functions that monitor temperature pressure
and flow speed from sensors and ensure that setpoint
temperature is reached and maintained. The second
has physical simulation functions which simulate how
the temperature pressure and flow speed are chang-
ing and interacting with each other to mimic physi-
cal processes in a heating system. Siemens TIApor-
tal project files, including PLC configuration, used in
this CR prototype have been made publicly available
on GitHub repository frostyICS
1
.
4.2 Warehouse Management
Warehouse management in this CR prototype is used
to control alarms and lights, which is a much simpler
1
frostyICS - https://github.com/austrisu/frostyICS
process than the heating plant. The control is pro-
vided by Siemens LOGO! 8.2 PLC since it is meant
for simple applications. LOGO! can have different
configurations depending on added functional mod-
ules. In this CR, LOGO! 8.2 basic module (Tab.
3) is used with built-in I/O and communication in-
terface. Created program logic implements Mod-
bus/TCP and S7comm protocol communications to
control the physical digital outputs, however, these
outputs are not connected to any physical actuators
and the actions are being simulated.
4.3 Supervision and Control of Systems
SADA permits an operator to visualize and interact
with the process, and this supervisory control system
in the CR prototype is handled two SCADA devices
(see Fig. 2): 1) SCADA used to control and monitor
the heating plant, and 2) WEB-SCADA for monitor-
ing and controlling the warehouse management sys-
tem and displaying a simple indication of the heat
plant state.
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
484
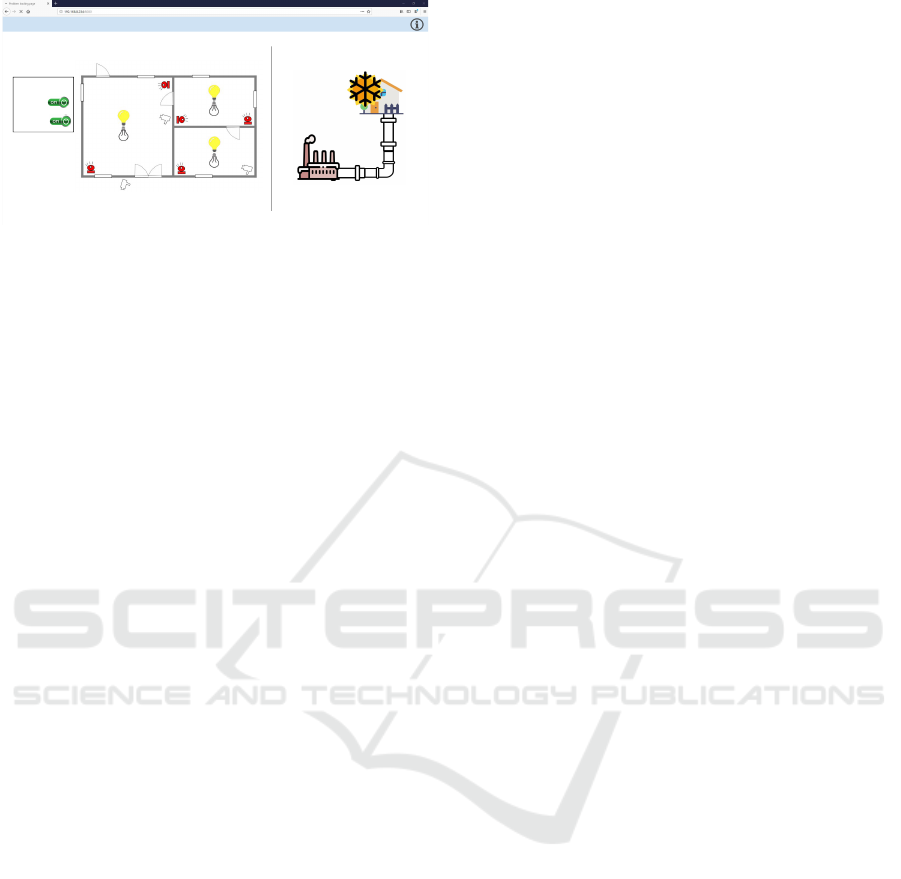
Warehouse management State of heating system
Web SCADA
Warehouse controls
Light control
Alarm control
Figure 4: Created warehouse management system visual-
ization.
Heating plant SCADA is visualized using WinCC
advanced V15.1 run-time (Fig. 3), which is the run-
time of the HMI and SCADA system for use on MS
Windows systems. WinCC software communicates
with an automation system, reads a data block, dis-
plays process visualization, and allows an operator to
interact with the automation system. WinCC runtime
resides on virtualized Windows 7 workstation (Fig. 2
(2)).
Warehouse management WEB-SCADA is differ-
ent from conventional SCADA as it utilizes web tech-
nologies for visualization and usually can be accessi-
ble as a web page. In this CR prototype, the authors
utilize NodeRed to create WEB-SCADA interface,
which is a common solution for low-budget projects.
NodeRed is a low-code platform, where program-
ming is similar to functional block diagram (FBD).
NodeRed is suitable for simple custom system solu-
tions sometimes encountered in IACS. Additionally,
NodeRed is used in RevolutionPI, which is a Raspber-
ryPi based PLC for prototyping industrial automation
projects. The created NodeRed application commu-
nicates with LOGO! 8.2 to display and control ware-
house lights and alarms. Additionally, WEB-SCADA
collects and visualizes data from LOGO! regarding
the heating plant state (Fig. 4).
The WEB-SCADA application resides on the
Siemens IOT2040 hardware (Fig. 2 (1)), a budget
industrial computer designed to withstand industrial
environments. IOT2040 has two network interfaces
which are used to introduce an intentional misconfig-
uration by connecting one interface directly to the en-
terprise network, bypassing the IACS firewall (Fig.
2). This misconfiguration of the CR prototype net-
work represents an intentional or incorrect network
configuration bypassing the intended security mech-
anisms. The authors believe that such security vul-
nerabilities may arise in an IACS segment, where au-
tomation engineers sometimes neglect IT safety pro-
cedures.
4.4 Communication Layout
Communication scheme is presented in figure 2 and
table 3 summarizes the communication services used
on IACS elements. To represent a realistic indus-
trial communication network, the CR prototype uti-
lizes two main industrial protocols – Modbus/TCP
and S7comm, which are commonly seen in different
IACS networks. S7comm usage is bound to Siemens
equipment as most of the Siemens components can
communicate using this protocol.
Modbus/TCP is an open-source protocol initially
used to work with serial communication, but with
TCP/IP protocol stack introduction in the IACS field,
Modbus was adopted to work with this protocol
stack. Modbus/TCP has become as one of the widely
adopted industry standards for transferring digital and
analog input/output (I/O) information. Detailed infor-
mation about this protocol is described in technical
specifications (Modbus, 2021; Dube and Camerini,
2002).
S7comm protocol is a Siemens proprietary proto-
col and does not have a publicly available detailed
official documentation. However, due to its popu-
larity, it has been reverse-engineered and thoroughly
described in different documents and publications
(Wireshark, 2021; Miru, 2016a; Miru, 2016b; Biham
et al., 2019; Snap7, 2021).
5 VERIFICATION
Created CR prototype was used to conduct an offen-
sive cybersecurity exercise for a treining audience, to
validate its functionality and applicability to knowl-
edge and practical skill development. This section
describes the validation exercise attack scenario, pos-
sible attack vectors, and execution steps.
5.1 Threat Scenario
Based on performed literature review identified out-
comes, training audience, within a defined attack sce-
nario (Section 5.3), conducts attacks through a broad
variety of routes, such as, the Internet, business or en-
terprise networks, and at the level of field devices tar-
get the IACS systems. After gaining initial foothold
into the target network, attackers may traverse the net-
work until access to the IACS systems is obtained.
Authors in the research (Zhu et al., 2011) state that
common attack vectors are backdoors, rootkits, holes
in network perimeter, vulnerabilities in standard pro-
tocols, communications hijacking, and man-in-the-
middle attacks. These considerations are taken into
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development
485
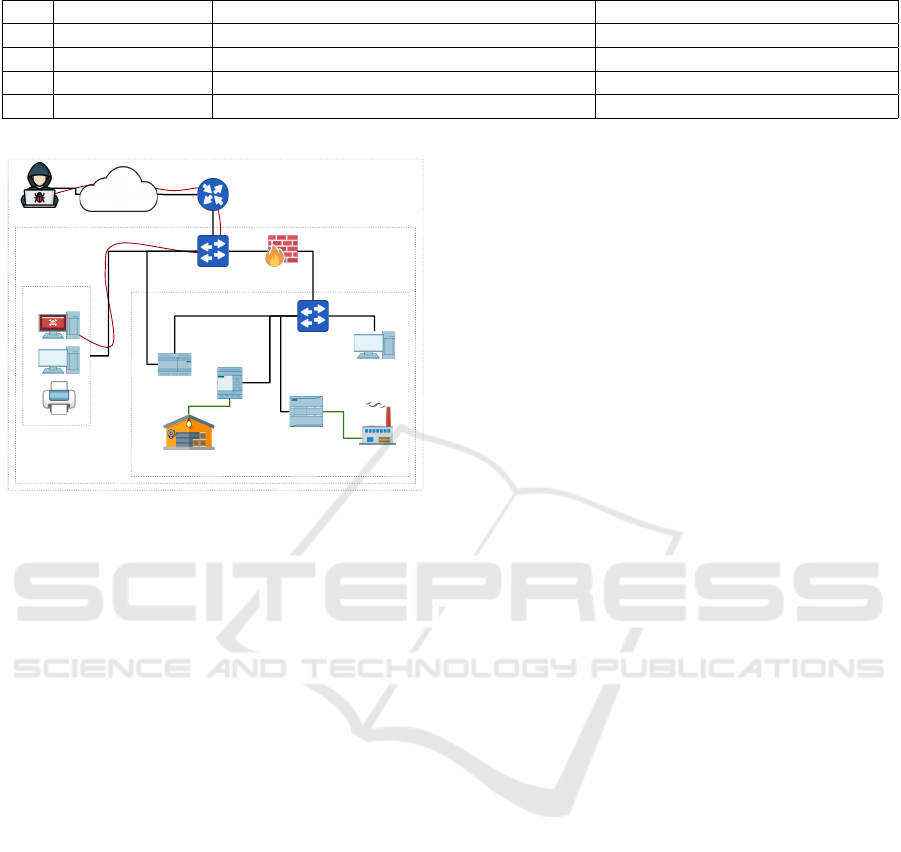
Table 3: Communication partners and services running on IACS elements.
Nr. Component Interaction partner Protocol support
1 SCADA WEB-SCADA S7comm, FTP
2 WEB-SCADA PLC S7-1200, Office workstations Modbus/TCP, HTTP, SSH
3 PLC LOGO! 8.2 PLC S7-1200, WEB-SCADA S7comm, Modbus/TCP
4 PLC S7-1200 SCADA, WEB-SCADA S7comm, Modbus/TCP
PLC S7-1200
WEB-SCADA
PLC LOGO! 8.2
IACS network
SCADA
Office network
Internet
Enterprise network
Warehouse
management system
Heating plant
External network
Attacker
Firewall
Router
Switch
Enterprise
switch
Figure 5: Created IACS CR prototype threat scenario topol-
ogy.
account when deciding the initial position of the at-
tacker within the exercise threat scenario. Within this
exercise scenario, it is assumed that the attacker has
already gained persistent access to the enterprise net-
work and has established an internal pivot point inside
the office network. Gaining this initial position is as-
sumed within the threat scenario to be already reached
by the attacker and is out of scope for this research
as it does not contribute towards IACS specific attack
execution. The initial state of the scenario is shown
in figure 5. In this scenario enterprise network is di-
vided into two segments – one is the office network,
where the attacker has gained initial access and has
established a command and control channel, and sec-
ond is the IACS network including the heating plant
and warehouse management systems.
In this scenario, the exercise participant plays as
a member of the cyber red team, which has two main
objectives: 1) switch off warehouse lights and alarm
preventing system recovery, and 2) damage heating
plant preventing system recovery.
5.2 Attack Structure
The MITRE ATT&CK (MITRE ATT&CK®, 2021)
TTPs knowledge-base is used to provide structure
to preformed attacks within threat scenario. This
knowledge-base is used to describe adversary’s ac-
tions to gain further access, compromise, and operate
within the target network. MITRE ATT&CK frame-
work provides consistent considerations to classify
the attacker’s goals, tasks, and steps, therefore being
applicable for modelling attack steps needed to reach
the specified objectives within the scenario.
A summary for the applicable tactics derived from
MITRE ATT&CK framework and used in the proto-
type exercise scenario are divided among each net-
work segment:
Tactics in the office network:
1. Discovery: searching for available devices in the
office network;
2. Lateral movement: exploiting and spreading to
other devices;
3. Persistence: gaining stable access to the devices;
4. Command and control: use of techniques to es-
tablish the communication with the compromised
system.
Tactics in the IACS network:
1. Discovery: searching for available devices in the
IACS network, and discovering open ports and
IACS processes controlled by the IACS network;
2. Collection: extracting detailed information about
IACS elements and their purpose;
3. Impact: actions on objectives.
5.3 Attack Execution Scenario
For the attacker to disrupt the operation of the ware-
house and heating plant controls, the following staged
attack execution scenario was designed and imple-
mented in the CR prototype:
1. Discovery in office network: This is the initial
phase with the attacker’s starting position in the
office network (Fig. 5). Based on the MITRE
ATT&CK knowledge-base, the attacker may per-
form network scanning and enumeration to iden-
tify services running on remote hosts. During this
step the main target is WEB-SCADA (IOT2040)
device;
2. Lateral movement: During this phase, the at-
tacker exploits a common misconfiguration of
NodeRed application to gain a foothold on the
WEB-SCADA (IOT2040) device and change the
position in the network (Fig. 5);
3. Persistence: The attacker establishes persistent
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
486
administrative access by exploiting misconfigured
user rights on WEB-SCADA (IOT2040), from
where the attacker has the possibility to propagate
further to the IACS network;
4. Command and control: In this step, the attacker
exploits misconfigured network topology where
WEB-SCADA has two network interfaces and
one of them is directly connected to the IACS net-
work bypassing the firewall. Attacker configures
WEB-SCADA (IOT2040) to redirect traffic from
the attacker to the target IACS network bypassing
firewall;
5. Discovery in IACS network: In this stage, the at-
tacker tries to enumerate devices in the IACS en-
vironment and learn about the internal network;
6. Objective Nr.1 - the attack on the warehouse: The
attacker attempts to get information about the tar-
get warehouse management system controlled by
LOGO! 8.2. Afterwards, the attacker attempts to
manipulate, disrupt, or impair IACS systems and
controlled physical processes by sending crafted
raw Modbus/TCP commands to LOGO! 8.2. Fur-
thermore, attacker performs a denial of service at-
tack against LOGO! 8.2 by exploiting buffer over-
flow vulnerability in PLC web server;
7. Objective Nr.2 - the attack on heat plant: Dur-
ing this stage, the attacker tries to get information
about the target heating plant system controlled
by S7-1200 PLC (Fig. 5). The attacker exploits
a lack of authentication for PLC, hence using
rough TIAportal downloads configuration from
PLC. Gained configuration facilitates attacker to
obtain contextual feedback and how the physical
system operates. During the impact stage, the at-
tacker attempts to manipulate, disrupt or impair
IACS systems and controlled physical processes.
The main vulnerabilities of S7-1200 are bound to
the S7comm protocol and to exploit these vul-
nerabilities, the attacker needs to understand the
control logic program structure, which was gath-
ered during the collection phase. From the down-
loaded S7-1200 program, the attacker may de-
termine which defined tags are responsible for
specific physical function control. The attacker
may send crafted S7comm requests to the PLC by
using a Python script using Snap7 library bind-
ings
2
. This attack exploits the lack of authen-
tication of the s7comm protocol. Python script
example for this scenario is located in GitHub
3
.
This attack process may be divided into two steps
2
PyPi Python-Snap7 - https://pypi.org/project/python-
snap7/
3
S7comm attack proof-of-concept scripts. - https://
github.com/austrisu/ICS poc
Heating system
HTF
Tank
Figure 6: Heating system state seen in the SCADA after
attack to S7-1200 PLC created by the author.
- the first one focusing on inflicting damage to
the circulation pump (Fig. 3 A1), and the sec-
ond aiming to damage the whole heating system.
After a successful execution of the attack, the
SCADA screen should visualize a damaged simu-
lated heating plant (Fig. 6). Successful execution
of these attacks results in impairment of the physi-
cal process and recovery, from a scenario perspec-
tive, may be made only by a physical repair. How-
ever, as the physical process is simulated then no
damage is done to actual CR physical devices and
they may be easily restored to the initial configu-
ration.
The goal of the created IACS CR was to provide
an environment, where participants may practice of-
fensive capabilities, in a game-based exercise, against
IACS elements and observe their impact. After the
two-day training and exercise, the participants in the
collected feedback indicated that the created CR pro-
totype environment is a perfect testbed for experimen-
tation and development of offensive capabilities in the
IACS field. Furthermore, the participants clearly in-
dicated that their confidence and knowledge had in-
creased after the two-day training session.
This work was recognized as a high importance
by representatives from national energy operators, na-
tional mobile telecommunication operator, national
cert, national armed forces, and universities.
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development
487

6 CONCLUSION AND FUTURE
WORK
This paper reviews the newest publicly available
IACS testbeds and based on identified gaps and re-
quirements derived the criteria for the CR testbed pro-
totype. Based on this, an actual novel prototype of
a cyber range was designed and created for red team
offensive capability development in game-based exer-
cise in the IACS field, thereby improving understand-
ing of IACS red team tactics and techniques. This
understanding of red team capabilities also provided
knowledge and practical capabilities on how to de-
fend IACS. The authors intend that individuals and
private or government entities may utilize this CR
for offensive exercises development by any suitable
means. The created CR prototype has been success-
fully validated by the authors by the developing and
conducting an offensive cyber red team validation ex-
ercise for a dedicated training audience. The future
work would include pursuing the directions of auto-
mated threat scenario creation and generated config-
uration deployment on IACS CR elements to allow
customizable training experience and variety of pos-
sible scenario variations based on the same testbed el-
ements.
ACKNOWLEDGEMENT
This research is a result of the Master’s thesis and the
authors express their gratitude to Vidzeme University
for supporting and making this research possible.
REFERENCES
Adepu, S., Kandasamy, N. K., and Mathur, A. (2019).
EPIC: An electric power testbed for research and
training in cyber physical systems security. In Kat-
sikas, S. K., Cuppens, F., Cuppens, N., Lambri-
noudakis, C., Ant
´
on, A., Gritzalis, S., Mylopoulos, J.,
and Kalloniatis, C., editors, Computer Security, pages
37–52. Springer International Publishing.
Almgren, M., Andersson, P., Bj
¨
orkman, G., Ekstedt, M.,
Hallberg, J., Nadjm-Tehrani, S., and Westring, E.
(2019). RICS-el: Building a national testbed for re-
search and training on SCADA security (short pa-
per). In Luiijf, E.,
ˇ
Zutautait{\textbackslash}.e, I., and
H
¨
ammerli, B. M., editors, Critical Information Infras-
tructures Security, pages 219–225. Springer Interna-
tional Publishing.
Alves, T., Das, R., Werth, A., and Morris, T. (2018). Vir-
tualization of SCADA testbeds for cybersecurity re-
search: A modular approach. Computers & Security,
77:531 – 546.
Alves, T. R., Buratto, M., de Souza, F. M., and Rodrigues,
T. V. (2014). Openplc: An open source alternative to
automation. In IEEE Global Humanitarian Technol-
ogy Conference (GHTC 2014), pages 585–589.
Bergman, D. C., Jin, D., Nicol, D. M., and Yardley, T.
(2009). The virtual power system testbed and inter-
testbed integration. In Proceedings of the 2nd Con-
ference on Cyber Security Experimentation and Test,
CSET’09, page 5, USA. USENIX Association.
Biham, E., Bitan, S., Carmel, A., Dankner, A., and Malin,
U. (2019). Rogue7: Rogue engineering-station attacks
on s7 simatic plcs. BlackHat.
Chromik, J. J., Remke, A., and Haverkort, B. R. (2018-
11-06). An integrated testbed for locally monitoring
SCADA systems in smart grids. Energy Informatics,
1(1):56.
CISA (2021). Compromise of u.s. water treatment fa-
cility. https://us-cert.cisa.gov/ncas/alerts/aa21-042a.
Accessed: 13.03.2021.
Dube, D. and Camerini, J. (2002). Modbus application
protocol. https://datatracker.ietf.org/doc/html/draft-
dube-modbus-applproto-00. Accessed:15.05.2021.
FireEye (2021). Advanced persistent threat groups. https:
//www.fireeye.com/current-threats/apt-groups.html.
Accessed: 13/03/2021.
Formby, D., Rad, M., and Beyah, R. (2018). Lower-
ing the barriers to industrial control system security
with GRFICS. In 2018 USENIX Workshop on Ad-
vances in Security Education (ASE 18), Baltimore,
MD. USENIX Association.
Fovino, I. N., Masera, M., Guidi, L., and Carpi, G. (2010).
An experimental platform for assessing scada vulner-
abilities and countermeasures in power plants. In 3rd
International Conference on Human System Interac-
tion, pages 679–686.
Geng, Y., Wang, Y., Liu, W., Wei, Q., Liu, K., and Wu, H.
(2019). A survey of industrial control system testbeds.
IOP Conference Series: Materials Science and Engi-
neering, 569:042030. Publisher: IOP Publishing.
Giuliano, V. and Formicola, V. (2019). Icsrange: A
simulation-based cyber range platform for industrial
control systems. CoRR, abs/1909.01910.
Gold, J. (2020). The five eyes and offensive cyber capabil-
ities: Building a ‘cyber deterrence initiative’. Techni-
cal report, NATO CCDCOE.
Green, B., Lee, A., Antrobus, R., Roedig, U., Hutchi-
son, D., and Rashid, A. (2017). Pains, gains and
plcs: Ten lessons from building an industrial con-
trol systems testbed for security research. In 10th
USENIX Workshop on Cyber Security Experimenta-
tion and Test (CSET 17), Vancouver, BC. USENIX
Association.
Gunathilaka, P., Mashima, D., and Chen, B. (2016). Soft-
grid: A software-based smart grid testbed for evaluat-
ing substation cybersecurity solutions. In Proceedings
of the 2nd ACM Workshop on Cyber-Physical Systems
Security and Privacy, CPS-SPC ’16, page 113–124,
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
488

New York, NY, USA. Association for Computing Ma-
chinery.
Hahn, A., Kregel, B., Govindarasu, M., Fitzpatrick, J., Ad-
nan, R., Sridhar, S., and Higdon, M. (2010). Develop-
ment of the powercyber scada security testbed. Pro-
ceedings of the Sixth Annual Workshop on Cyber Se-
curity and Information Intelligence Research.
Holm, H., Karresand, M., Vidstr
¨
om, A., and Westring, E.
(2015). A survey of industrial control system testbeds.
In Buchegger, S. and Dam, M., editors, Secure IT Sys-
tems, pages 11–26. Springer International Publishing.
Kaspersky Lab (2021a). Apt attacks on industrial com-
panies in 2020. Technical report, AO KASPERSKY
LAB.
Kaspersky Lab (2021b). Threat landscape for industrial au-
tomation systems. Technical report, AO KASPER-
SKY LAB.
Koganti, V. S., Ashrafuzzaman, M., Jillepalli, A. A., and
Sheldon, F. T. (2017). A virtual testbed for security
management of industrial control systems. In 2017
12th International Conference on Malicious and Un-
wanted Software (MALWARE), pages 85–90.
Korkmaz, E., Dolgikh, A., Davis, M., and Skormin, V.
(2016). Industrial control systems security testbed. In
11th Annual Symposium on Information Assurance.
Krishnan, S. and Wei, M. (2019). SCADA testbed for vul-
nerability assessments, penetration testing and inci-
dent forensics. In 2019 7th International Symposium
on Digital Forensics and Security (ISDFS), pages 1–6.
Larrucea, X. and Molinuevo, A. (2020). An ICS based
scenario generator for cyber ranges. In Yilmaz, M.,
Niemann, J., Clarke, P., and Messnarz, R., editors,
Systems, Software and Services Process Improvement,
pages 543–554. Springer International Publishing.
Lewis, J. A. (2015). The role of offensive cyber operations
in nato’s collective defence. The tallin papers.
Mallouhi, M., Al-Nashif, Y., Cox, D., Chadaga, T., and
Hariri, S. (2011). A testbed for analyzing security of
scada control systems (tasscs). In ISGT 2011, pages
1–7.
Mathur, A. P. and Tippenhauer, N. O. (2016). Swat: a wa-
ter treatment testbed for research and training on ics
security. In 2016 International Workshop on Cyber-
physical Systems for Smart Water Networks (CySWa-
ter), pages 31–36.
Miru, G. (2016a). The siemens s7 communication - part 1
general structure. http://gmiru.com/article/s7comm/.
Accessed: 27.04.2021.
Miru, G. (2016b). The siemens s7 communication -
part 2. http://gmiru.com/article/s7comm-part2/. Ac-
cessed:15.05.2021.
MITRE (2021). Apt groups. https://attack.mitre.org/
groups/. Accessed: 13/03/2021.
MITRE ATT&CK® (2021). Mitre att&ck®. https://attack.
mitre.org/. Accessed: 01.04.2021.
Modbus (2021). Modbus official technical resources. https:
//www.modbus.org/tech.php. Accessed:15.05.2021.
Morris, T., Srivastava, A., Reaves, B., Gao, W., Pavurapu,
K., and Reddi, R. (2011). A control system testbed
to validate critical infrastructure protection concepts.
International Journal of Critical Infrastructure Pro-
tection, 4(2):88 – 103.
Muller, L. P. (2019). Military offensive cyber-
capabilities:small-state perspectives. Technical report,
Netherlands.
Noorizadeh, M., Shakerpour, M., Meskin, N., Unal, D., and
Khorasani, K. (2021). A cyber-security methodology
for a cyber-physical industrial control system testbed.
IEEE Access, 9:16239–16253.
Pfrang, S., Kippe, J., Meier, D., and Haas, C. (2017). De-
sign and architecture of an industrial IT security lab.
In Guo, S., Wei, G., Xiang, Y., Lin, X., and Lorenz, P.,
editors, Testbeds and Research Infrastructures for the
Development of Networks and Communities, pages
114–123. Springer International Publishing.
Reaves, B. and Morris, T. (2012). An open virtual testbed
for industrial control system security research. Inter-
national Journal of Information Security, 11.
Rosa, L., Cruz, T., Sim
˜
oes, P., Monteiro, E., and Lev, L.
(2017). Attacking SCADA systems: A practical per-
spective. In 2017 IFIP/IEEE Symposium on Inte-
grated Network and Service Management (IM), pages
741–746.
Rubio-Hernan, J., Rodolfo-Mejias, J., and Garcia-Alfaro,
J. (2017). Security of cyber-physical systems. In
Cuppens-Boulahia, N., Lambrinoudakis, C., Cuppens,
F., and Katsikas, S., editors, Security of Industrial
Control Systems and Cyber-Physical Systems, pages
3–18. Springer International Publishing.
Snap7 (2021). Step7 open source ethernet communi-
cation suite. http://snap7.sourceforge.net/. Ac-
cessed:15.05.2021.
Stamp, J., Urias, V., and Richardson, B. (2011). Cyber secu-
rity analysis for the power grid using the virtual con-
trol systems environment. In 2011 IEEE Power and
Energy Society General Meeting, pages 1–4.
Stranahan, J., Soni, T., and Heydari, V. (2019). Supervisory
control and data acquisition testbed for research and
education. In 2019 IEEE 9th Annual Computing and
Communication Workshop and Conference (CCWC),
pages 0085–0089.
Su, W., Antoniou, A., and Eagle, C. (2017). Cyber security
of industrial communication protocols. In 2017 22nd
IEEE International Conference on Emerging Tech-
nologies and Factory Automation (ETFA), pages 1–4.
Tao, Y., Xu, W., Li, H., and Ji, S. (2019). Experience and
lessons in building an ICS security testbed. In 2019
1st International Conference on Industrial Artificial
Intelligence (IAI), pages 1–6.
UK Government (2016). National cyber security strategy
2016-2021. Technical report, UK.
Urdaneta, M., Lemay, A., Saunier, N., and Fernandez, J.
(2018). A cyber-physical testbed for measuring the
impacts of cyber attacks on urban road networks. In
Staggs, J. and Shenoi, S., editors, Critical Infrastruc-
ture Protection XII, pages 177–196. Springer Interna-
tional Publishing.
Werth, A. W. and Morris, T. H. (2021). Prototyping PLCs
and IoT devices in an HVAC virtual testbed to study
Industrial and Automation Control System Cyber Range Prototype for Offensive Capability Development
489

impacts of cyberattacks. In Yang, X.-S., Sherratt,
R. S., Dey, N., and Joshi, A., editors, Proceedings
of Fifth International Congress on Information and
Communication Technology, pages 612–623. Springer
Singapore.
Wireshark (2021). S7 communication (s7comm). https:
//wiki.wireshark.org/S7comm. Accessed: 27.04.2021.
Xie, Y., Wang, W., Wang, F., and Chang, R. (2018). VTET:
A virtual industrial control system testbed for cyber
security research. In 2018 Third International Con-
ference on Security of Smart Cities, Industrial Control
System and Communications (SSIC), pages 1–7.
Zhou, X., Xu, Z., Wang, L., Chen, K., Chen, C., and Zhang,
W. (2018). Kill chain for industrial control system.
MATEC Web Conf.
Zhu, B., Joseph, A., and Sastry, S. (2011). A taxonomy
of cyber attacks on scada systems. In 2011 Interna-
tional Conference on Internet of Things and 4th In-
ternational Conference on Cyber, Physical and Social
Computing, pages 380–388.
ICISSP 2022 - 8th International Conference on Information Systems Security and Privacy
490
