
StructureNet: Deep Context Attention Learning for Structural
Component Recognition
Akash Kaothalkar
1
, Bappaditya Mandal
2
and Niladri. B. Puhan
1
1
Indian Institute of Technology Bhubaneswar, India
2
Keele University, Newcastle-under-Lyme, U.K.
Keywords:
Class Contexts, Context Attention, Semantic Segmentation, Structural Component Recognition.
Abstract:
Structural component recognition using images is a very challenging task due to the appearance of large
components and their long continuation, existing jointly with very small components, the latter are often
outcasted/missed by the existing methodologies. In this work, various categories of the bridge components are
exploited at the contextual level information encoding across spatial as well as channel dimensions. Tensor
decomposition is used to design a context attention framework that acquires crucial information across various
dimensions by fusing the class contexts and 3-D attention map. Experimental results on benchmarking bridge
component classification dataset show that our proposed architecture attains superior results as compared to
the current state-of-the-art methodologies.
1 INTRODUCTION
Manual inspection of structural damages consumes
long but crucial decision making time intervals, re-
sulting in the delay of assessment and damage con-
trol/management/mitigation/recovery activities. The
first step in the image/video based automatic dam-
age assessment process is the detection or recogni-
tion (used interchangeably in this work) of the struc-
tural components, as damages can vary from struc-
ture to structure. For example, respective damages
on columns and beams/slabs might be handled in dif-
ferent ways. Thus, if the captured image or video
data can provide an initial assessment by recognizing
the structural components (such as columns, beams,
slabs, etc) automatically without actually going on the
site of the damage, it can serve as a head-start for fur-
ther inspection (Bhattacharya et al., 2021b). Required
image or video data can be collected by using digital
cameras, UAVs, or even satellite imaging.
Critical infrastructures like bridges play a very
crucial role during any environmental disaster, as their
structures are responsible for the movement of ve-
hicles and people from one place to another. Thus,
the inspection of bridges and similar structures can be
treated as a high priority and mission critical task. Our
aim in this work is to get some valuable information
about the structural components without actually go-
ing on-site, in a non-intrusive manner, analyzing im-
ages/videos, captured at a distance, while consuming
less time. Traditional methods use machine learning
techniques which are mostly hand-engineered (Koch
et al., 2014; Zhu and Brilakis, 2010). The datasets
used for such works are either small in size or con-
tain images of a single structure per image. Structural
component recognition is also performed using 3-D
point clouds (Golparvar-Fard et al., 2011a; Golparvar-
Fard et al., 2011b; Lu et al., 2019), but these methods
require setting up sensor networks near the structures,
which can be a cumbersome, time-consuming and te-
dious process.
Recent benchmarks, such as (Narazaki et al.,
2017; Yeum et al., 2019) make use of semantic seg-
mentation for bridge structural component recogni-
tion considering pixel accuracy as the standard eval-
uation metric. These works make use of multi-scale
convolutional neural networks (CNNs) using the ex-
isting architectures. Recent work (Narazaki et al.,
2020) uses deep semantic segmentation models to
recognise the bridge components. Other works (Gao
and Mosalam, 2018; Liang, 2019; Miao et al., 2019)
try to combine both defect and structural compo-
nent segmentation procedures; however, they only
consider binary classification with limited structural
components. Thus, the works that are done in the
field of structural components recognition using non-
intrusive (at a distance) vision based methodologies
are limited and the challenges are underestimated in
Kaothalkar, A., Mandal, B. and Puhan, N.
StructureNet: Deep Context Attention Learning for Structural Component Recognition.
DOI: 10.5220/0010872800003124
In Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2022) - Volume 5: VISAPP, pages
567-573
ISBN: 978-989-758-555-5; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
567
the current literature. This is also evident by the re-
ported low accuracy rates, such as shown in Table 1.
Improvement in this field of bridge structural compo-
nent recognition will strongly support automation in
structural defects recognition/management and health
monitoring (Bhattacharya et al., 2021a).
Recent works in semantic segmentation (Huang
et al., 2019; Zhang et al., 2019) have exploited cat-
egory features rather than global features used in the
earlier works (Chen et al., 2018; Zhao et al., 2017).
As each pixel belongs to a different category, exploit-
ing class-level features gives improved performance.
Non-local based self-attention (Wang et al., 2018) has
also been a popular method for generating the class-
level contexts. However, such methods rely on 2-D
affinity matrix that can lose salient information along
the channel dimensions. To encompass richer in-
formation, tensor decomposition theory (Kolda and
Bader, 2009) exploits a 3-D attention map without
losing information along the channel dimension.
The proposed StructureNet framework contributes
towards structural component recognition by propos-
ing a novel architecture that fuses class contexts and
inter-category relations obtained through designing a
3-D attention map. Class contexts consider the con-
textual information from a categorical perspective,
which is an accumulation of features belonging to
that class (Zhang et al., 2019). The attention map
captures long-range dependencies and its fusion with
class contexts generates a modified feature map com-
prising class-level relations as well as class pixels ag-
gregations. The interaction between pixel represen-
tations and class-level predictions provides a better
scope for generating crucial features as they can be
exposed to class distribution across the dataset. The
datasets available in the field of structural component
recognition are limited and thus Bridge Component
Classification Dataset is collected from the authors of
(Narazaki et al., 2017) and the results are compared
with the relevant benchmarking methods.
2 ARCHITECTURE FOR
STRUCTURAL COMPONENT
RECOGNITION
To exploit various class-level features of structural
components, the proposed StructureNet consists of
a backbone architecture along with attention mod-
ules to extract feature maps. Soft predictions are
computed from the backbone architecture, which are
amalgamated to generate the class contexts and at-
tention maps. At the later stage of the architecture,
Backbone
X
X
Context
Aenon
Module
X'
So
Predicons
(P
so
)
Class
Contexts
(X
cat
)
3-D Aenon
Map (M)
Reshape
Reshape
X
mod
Input
Predicon
1x1conv
1x1conv
1x1conv
Concatenaon
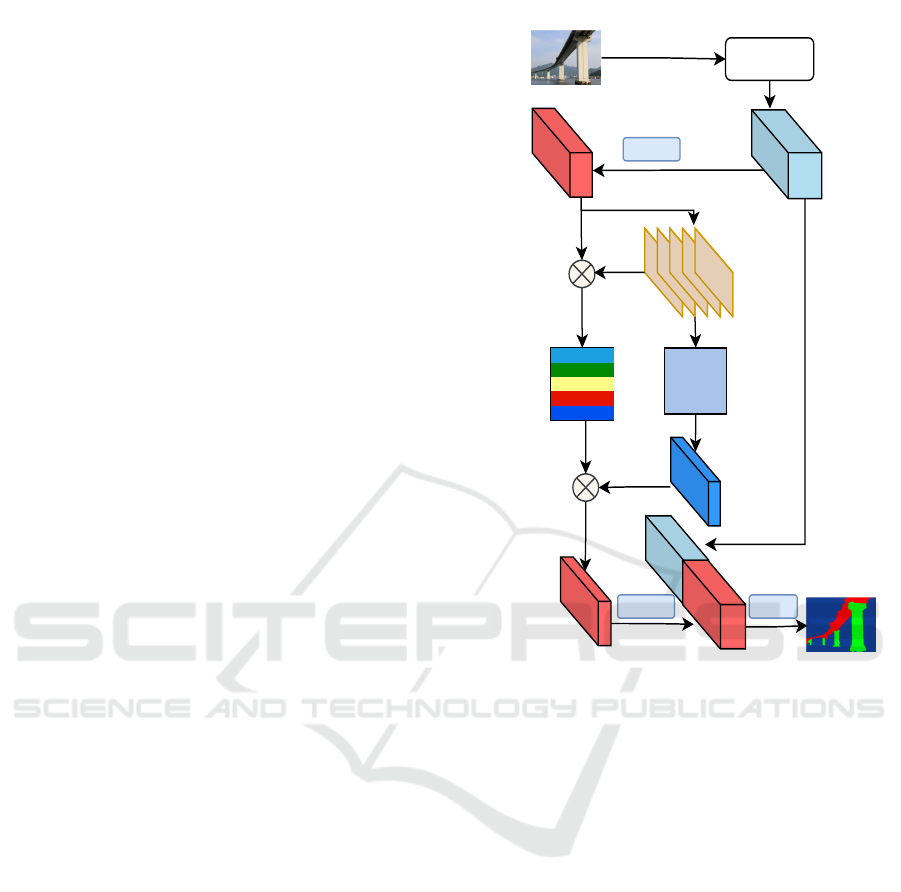
Figure 1: Illustration of StructureNet. The architecture fol-
lows, (i) the image is given as input to the backbone archi-
tecture ; (ii) soft predictions are computed; (iii) class con-
texts and attention maps are generated; (iv) fusion of both
class contexts and 3-D attention map; (v) concatenation and
final prediction.
both are fused to generate prediction ready semanti-
cally rich modified feature maps. The model archi-
tecture is shown in Fig. 1. Across the model de-
scription, 1 ×1 conv refers to the sequence of conv →
batchnorm → ReLU, except in last prediction layer.
Backbone: The model uses ResNet-50 (He et al.,
2016) architecture with an output stride of 8 following
PSPNet (Zhao et al., 2017), where classification and
last two pooling layers are removed and the dilation
rate of the convolution of the last two stages are set to
2 and 4, respectively.
The model architecture works on fusion of two
major aspects (i) generating class contexts and (ii)
generating a 3-D attention map using the context at-
tention module. They are described in the following
subsections.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
568

2.1 Generating Class Contexts
The purpose of generating class contexts is the inter-
action of class-level features with the globally trained
features (Zhang et al., 2019). To generate class con-
texts, we make a soft prediction from the output fea-
ture map X ε R
C×H×W
. Soft predictions represented
as P
so f t
ε R
N×H×W
are initial predictions that are
made on the output features of the backbone architec-
ture. Here, N is the number of classes and C, H, and
W are channel, height, and width dimensions, respec-
tively. The channel dimension of X is reduced from
C to C
0
through 1 × 1 conv to save the computations
and is represented by X
0
. Applying 1 × 1 conv with N
filters on X
0
generates the soft predictions. Class con-
texts are represented by X
cat
ε R
N×C
0
and generated
by the dot product of X
0
and P
so f t
. It is preceded by
required reshape operation and followed by normal-
ization through so f tmax operation. Class contexts,
X
cat
is obtained by:
X
cat
= so f tmax(X
0
· P
so f t
) (1)
The feature maps, X ε R
C×H×W
are learned over
the entire dataset. Since the class context of each of
the categories interacts with the respective features
across the dataset, it broadens the learning capacity
of the model.
2.2 Context Attention (CA) Module
According to tensor decomposition theory (Kolda and
Bader, 2009; Chen et al., 2020), any high-rank tensor
can be represented as the combination of rank-1 ten-
sors. Non-local self-attention models can lead to the
loss of information in channel dimension as they work
with a 2-D affinity matrix. Since context features con-
tain both spatial as well as channel information, work-
ing with a 3-D attention map without losing channel
dimension seems to be more accurate.
To solve the issue with non-local self attention-
based methodology, we treat soft predictions as a
high-rank problem and refine them using tensor de-
composition. From the previous works, it can be ob-
served that the context prediction is a high-rank prob-
lem (Huang et al., 2019). Low rank tensors are syn-
thesized together to generate a high-rank 3-D atten-
tion map without salient losing information in any di-
mension. Soft predictions, P
so f t
are given as input to
this module and rank-1 tensors are generated across
each dimensions. These rank-1 tensors are gener-
ated across each dimension by applying a sequence of
Global pool → 1 × 1 conv → sigmoid across each di-
mension i.e. category (N), height (H) and width (W ).
For each dimension, m rank-1 tensors are generated,
where m is selected to be the number of classes. This
selection for m enables each class to learn about all
the other classes and create an robust attention map.
All these rank-1 tensors are synthesized together
to get attention map M ε R
N×H×W
. For instance,
p
n1
ε R
N×1×1
, p
h1
ε R
1×H×1
and p
w1
ε R
1×1×W
will
be synthesized to create an auxiliary attention map,
M
1
. All these auxiliary attention maps are linearly
scaled and added, where the scaling parameter, α is
a trainable parameter. Thus, the final output is 3-D
attention map M given by (2) and (3). The context
attention module is illustrated in Fig. 2.
M
i
= p
ni
· p
hi
· p
wi
(2)
M =
r
∑
i=1
α
i
M
i
(3)
In our architecture, the CA module goes ahead by ap-
plying tensor decomposition theory to soft predictions
and fusing the attention map generated with the class
level contexts rather than only with pixel representa-
tions. The proposed work also differentiates by the
selection of the rank variable r. Choosing the value
of r equal to the number of classes can be thought of
as dedicating one attention map per class and there-
fore helps the model architecture to generate inter-
category relationships.
2.3 Fusion of Attention map with Class
Contexts
The final stage of the network fuses the generated
class contexts (X
sec
) and attention map (M) to create
more semantically rich pixel representations (X
mod
).
Dot product between the two across the class dimen-
sion (N) yields X
mod
ε R
C
0
×H×W
, given by:
X
mod
= {X
cat
· M}
Across the dimension N
. (4)
The architecture utilizes 3-D attention map which
is obtained by passing P
so f t
through context attention
module yielding M ε R
N×H×W
. Finally, the dot prod-
uct between class contexts (X
sec
) and attention map
(M) yields the modified feature maps (X
mod
).
Class contexts learn the relationship between pix-
els and category representation, while the attention
map makes every class learn about all the other
classes thus generating inter-category relationships.
Thus, the fusion operation yields pixel representations
rich with category interrelations as well as contextu-
ally affluent features.
To match with the shape of the backbone gener-
ated feature maps, the channel dimension of X
mod
is
changed back from C
0
to C through 1 × 1 conv. The
value of C
0
is chosen to be 512 during implementa-
tion. Finally, we concatenate X and X
mod
and refine it
by 1 × 1 conv to get the final predictions.
StructureNet: Deep Context Attention Learning for Structural Component Recognition
569
Permute
Permute
N x W x H N x H x W W x H x N
Pool
1 x 1 Conv
Sigmoid
Pool
1 x 1 Conv
Sigmoid
Pool
1 x 1 Conv
Sigmoid
For each group of m tensors
N x 1 x 1
1 x 1 x W1 x H x 1
m
tensors
P
so
M
Scaled
Addion
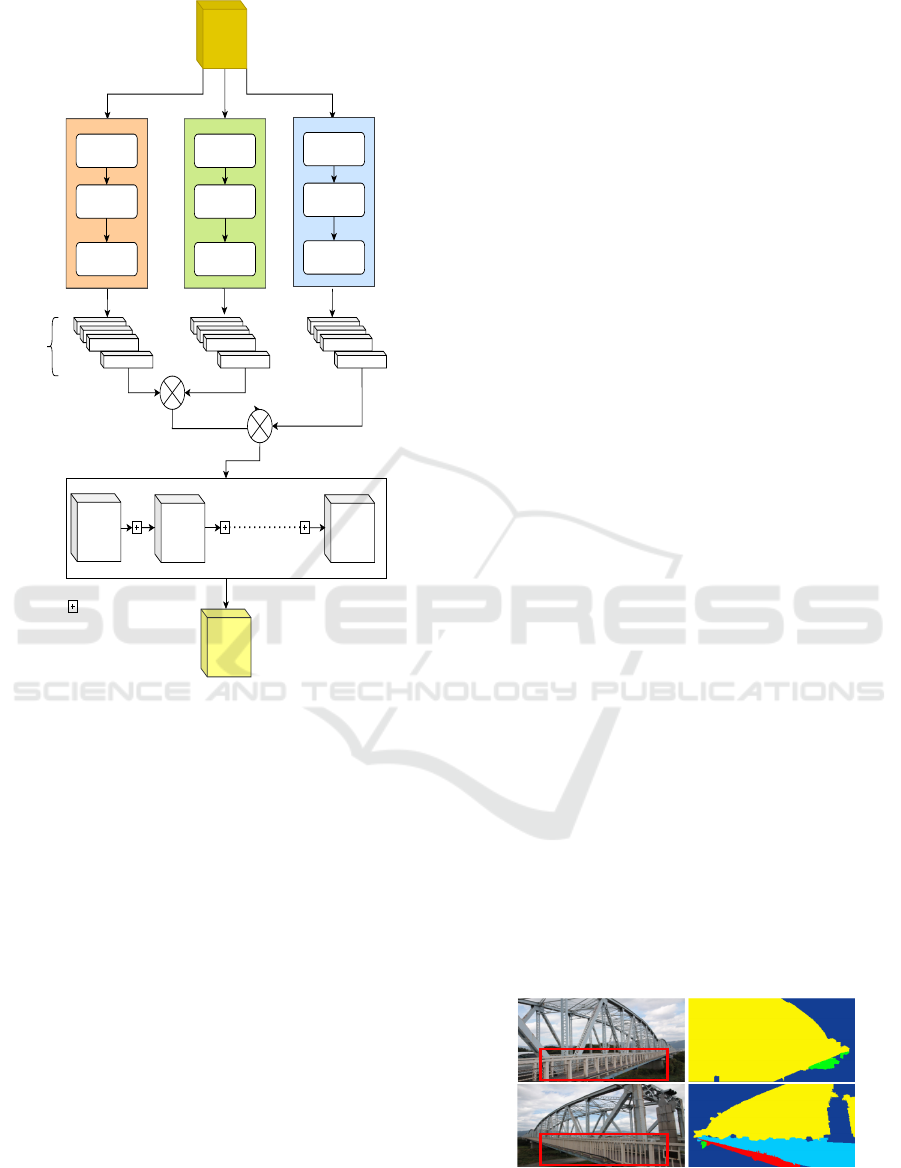
Figure 2: The architecture of context attention module.
P
so ft
(soft predictions) are input to the module, which per-
forms low rank factorization on each of the dimensions (H,
W , N) r times. The output of the module is a 3-D attention
map utilizing all the information contained in soft predic-
tions.
3 EXPERIMENTS
3.1 Bridge Component Classification
Dataset
This dataset contains a total (train+test) of 1,563
bridge images (Narazaki et al., 2017) obtained for re-
search and comparison evaluation purposes. The test
set has 234 images. The pixel-wise labeling belongs
to 5 classes: Non-bridge, Columns, Beams and Slabs,
Other Structural, and Other Non-structural. The im-
ages in the dataset have dimensions of 320 × 320 pix-
els. The challenges that follow along with this dataset
are: (i) inconsistency in labeled ground truths. As
shown in Fig. 3, two images with similar class (in-
side red box) are labelled differently. (ii) occlusion of
small structures due to larger ones and (iii) position of
camera viewpoints relative to the structure also plays
a major role. Thus, accurate segmentation over such
a dataset is a challenging process.
3.2 Benchmarking Methods
We compare the proposed StructureNet with the
works of (Narazaki et al., 2017) which comprises of
multi-scale CNNs and some relevant existing archi-
tectures such as ResNet (He et al., 2016). The work
mentions two types of results, i.e., with scene infor-
mation and without scene information. Both the re-
sults are considered for comparison study. Another
work by (Yeum et al., 2019) has exploited Bridge
Component Classification Dataset with the use of
FCNs (Long et al., 2015) which is also taken into
consideration. Three different architectures (FCN45,
SegNet45, and Seg45-S) are tested over Bridge Com-
ponent Classification Dataset with three different con-
figurations (Naive, Parallel, and Sequential) in a re-
cent work (Narazaki et al., 2020) by the same authors.
3.3 Implementation Details
The ResNet-50 (He et al., 2016) backbone is pre-
trained on the Bridge Component Classification
Dataset for 200 epochs. A batch-size of 8 is used
during both pre-training and training procedures. Fol-
lowing the previous work (Narazaki et al., 2017), data
augmentation of random cropping, random flipping,
and random rotation along with center crop are ap-
plied to the Bridge Component Classification Dataset.
Class weights are calculated using median frequency
balancing and a weighted cross-entropy loss is used
for training. The value of rank m, is taken equal to the
number of classes in the dataset, in this case, 5. The
learning rate is set as 10
−4
along with polynomial de-
cay. For optimization, Adam optimizer is used with
β
1
= 0.9 and β
2
= 0.999. The models are trained
for 500 epochs on Bridge component classification
dataset and Make3D-S and for 1000 epochs on Aerial
imagery dataset. The experiments are implemented
(i) Images (ii) Ground Truths
Figure 3: Actual images and corresponding ground truths
can be compared with respect to labels in images shown.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
570
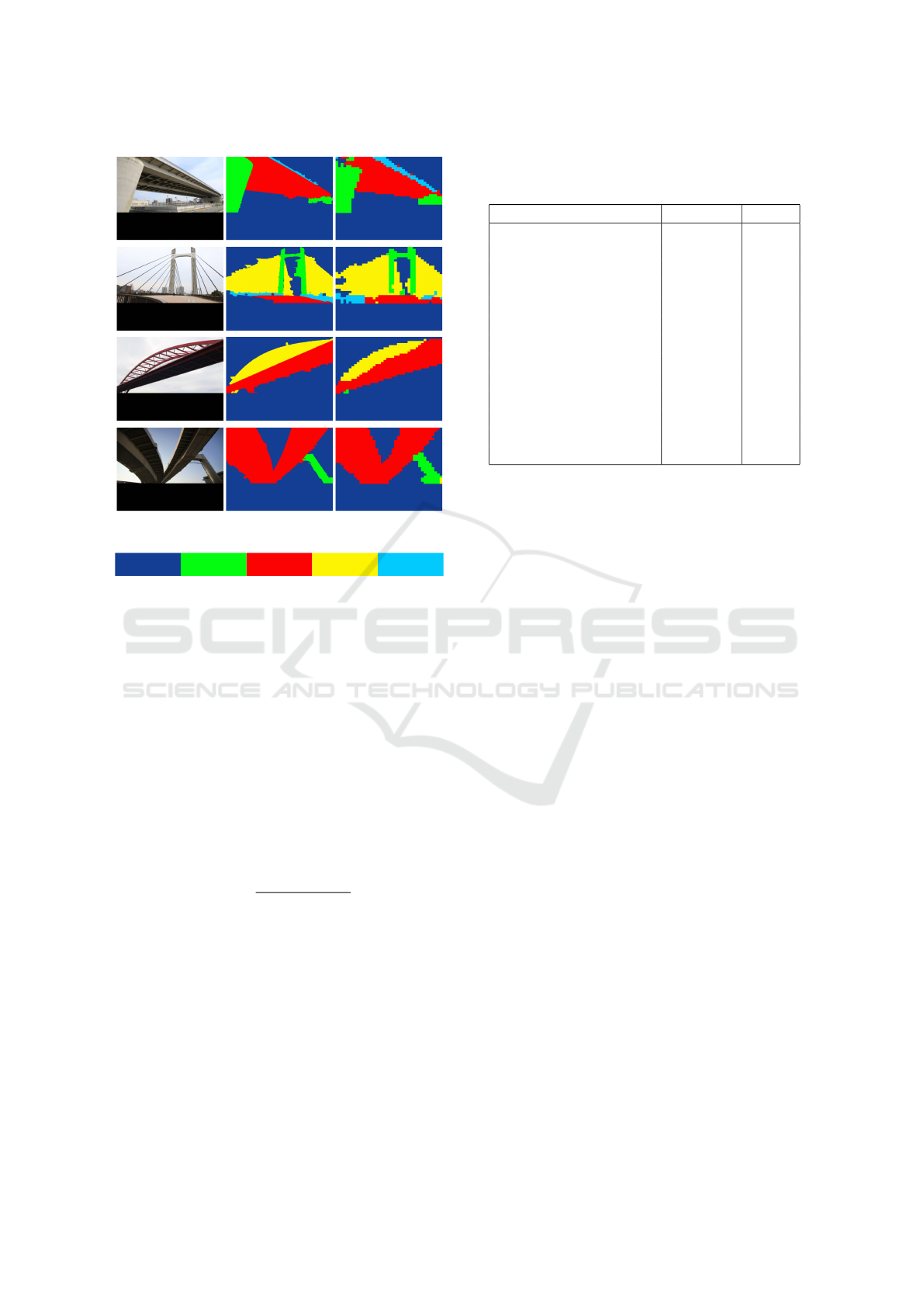
(a) Test Image (b) Ground Truth (c) Predictions
Non-Bridge
Other
Structural
Beams/Slabs
Other
Non-Structural
Columns
Figure 4: Segmentation results of StructureNet on Bridge
Component Classification test set.
using Python keras api with Tensorflow backend on a
system with Intel core i7 processor, 16 GB RAM, and
NVIDIA GeForce RTX-2070 8GB GPU card.
3.4 Performance Metrics
For comparison with the previous benchmark meth-
ods, pixel accuracy (PA) over test set is evaluated
which represents the percentage of correct pixel class
prediction over the ground truth. We also calculate
mean intersection over union (mIOU), where IOU
given by (5) is calculated over each semantic class
and then averaged.
IOU =
T P
T P + FN +FP
(5)
where T P, FN and FP denote true positives, false
negatives and false positives, respectively, which are
obtained by comparing the ground truth labels and the
predicted labels.
3.5 Results and Discussions
Comparison with Benchmarks: Table 1 summa-
rizes the performance of the proposed StructureNet
over the other existing benchmarks. Previous meth-
ods (Narazaki et al., 2017; Yeum et al., 2019) have
Table 1: Comparison with Benchmarks. Models with dif-
ferent configurations Naive (N), Parallel (P) and Sequential
(S) are compared through pixel accuracy (PA) and mIOU.
Benchmarking Works mIOU(%) PA(%)
CNPT - N
1
50.8 80.3
CPNT - Scene
1
- 82.4
FCN45
2
- 82.3
FCN45 - N
3
57.0 84.1
FCN45- P
3
56.9 84.1
FCN45- S
3
56.6 83.9
SegNet45- N
3
54.5 82.3
SegNet45 - P
3
55.2 82.9
SegNet45 - S
3
55.2 82.9
SegNet45-S - N
3
55.8 83.1
SegNet45-S - P
3
55.9 83.3
SegNet45-S - S
3
55.4 82.7
StructureNet 57.46 89.08
1
(Narazaki et al., 2017)
2
(Yeum et al., 2019)
3
(Narazaki
et al., 2020)
presented the results in terms of pixel accuracy and
the comparison is made with the latest work by
Narazaki (Narazaki et al., 2020), where both pixel
accuracy and mIOU are considered. StructureNet
achieves pixel-wise accuracy of 89.08% with mean
IOU of 57.46%. StructureNet thus performs better in
terms of pixel accuracy as compared to existing works
and outperforms (Narazaki et al., 2017) in terms of
mIOU as well. As mentioned in Sec. 3.1, the in-
consistent labeling of a few ground truths is an is-
sue for performance saturation on testing data. For
a 320 × 320 input image, the average processing time
of StructureNet is 0.0567 seconds.
The first benchmark on the dataset by (Narazaki
et al., 2017) proposed naive component classifier
(CPNT - N) and component classifier with scene in-
formation classifier (component classifier with scene
information - Scene), where the results are presented
in terms of pixel accuracy on ResNet23 model (mIOU
score is taken from (Narazaki et al., 2020)). The
benchmark from other work (Yeum et al., 2019) is
taken for Bridge component classification dataset and
results for other dataset are excluded. All the other re-
sults are various methods proposed in (Narazaki et al.,
2020) out of which FCN45-N reports the best mIOU
of 57.0% and best pixel accuracy of 84.1%. Struc-
tureNet outperforms the best performing metric by
0.46% and 4.98%, respectively. The fusion of the 3-D
attention map and class contexts captures long range
dependencies in the feature maps and thus elevating
the performance of the architecture, thereby resulting
in better accuracy.
Assessment on Other Datasets: To assess the ability
of StructureNet to generalise on the semantic segmen-
StructureNet: Deep Context Attention Learning for Structural Component Recognition
571

Table 2: Assessment of StructureNet on two other datasets
when compared with the backbone model.
Assessment mIOU (%) PA (%)
Make3D-S (Liu et al., 2010)
Baseline ResNet-50 65.83 88.42
StructureNet 74.52 93.65
Aerial Imagery (Humans in the loop, 2020)
Baseline ResNet-50 51.56 68.07
StructureNet 55.86 70.22
tation task, we evaluate the performance of the model
on two other datasets namely Semantic Augmented
Make3D (Liu et al., 2010; Saxena et al., 2005; Saxena
et al., 2008) dataset (referred as Make3D-S), obtained
for research and comparison evaluation purposes and
Aerial imagery dataset (Humans in the loop, 2020),
obtained under CC0 1.0 Universal (CC0 1.0) licens-
ing. We also compare the performance of these mod-
els with respect to the backbone ResNet-50 architec-
ture and show that the StructureNet outperforms the
backbone architecture. Table 2 summarizes the as-
sessment and shows that for both the datasets, Struc-
tureNet performs better than the backbone architec-
ture (ResNet-50).
Make3D-S consists of 400 training images and
134 evaluation images belonging to 8 different
classes. The input resolution of each image is 240 ×
320. This dataset was selected because it captures
outdoor scenes consisting of structures like build-
ings of different varieties. Aerial imagery of Dubai
captured by MBRSC satellites and annotated with
pixel-wise semantic segmentation in 6 classes (Hu-
mans in the loop, 2020). The total volume of the
dataset is 72 images grouped into 6 larger tiles. We
have separated two tiles (18 images) for evaluation
and augmented the remaining tiles for training pur-
poses. The input resolution for this dataset was kept
to be 224 × 224. The augmentation used are simi-
lar to those reported for Bridge component classifi-
cation dataset. This dataset can be considered chal-
lenging due to presence of satellite images along with
less training examples. It is evident from Table 2 that
our proposed StructureNet outperforms the baseline
works for semantic segmentation task as well.
Results in Table 2 show a significant jump from
the baseline ResNet-50 architecture, reason being the
incorporation of fusion of class contexts and context
attention module, which added more fine-grained fea-
ture extraction and thus improving the metric num-
bers. The inter-category relationships generated by
the context attention module adds a deeper insight in
feature extraction.
Ablation Study: To show the efficacy of fusion of
class contexts and 3-D attention map, we test the
Table 3: Ablation study to show efficacy of fusion of atten-
tion map with class contexts.
Condition mIOU (%) PA (%)
Only class context 45.80 78.37
Only Context attention
(CA) module
39.40 70.52
Fusing class context
and CA module
57.46 89.08
network individually only when one of the two is
present. For the first case, we remove the context at-
tention module and directly combine soft predictions
and class contexts. For the second case, we apply the
context attention module to the output feature map
(X), removing the class context branch. The results
are summarized in Table 3. It can be noted that in-
dividually each module does not yield the optimum
results, it’s only when they are fused there is a signif-
icant improvement in the prediction performance.
4 CONCLUSION
In this work, we have proposed a new architecture
StructureNet to address the challenging task of struc-
tural component recognition. The novel architec-
ture fuses class contexts with an attention map gener-
ated through tensor decomposition encoding informa-
tion across spatial as well as the channel dimensions.
Class contexts are rich with the knowledge encoding
feature maps correlating to various classes. The at-
tention map captures long-range dependencies with-
out any loss in the channel dimensions. Thus, the fu-
sion operation generates an information enriched fea-
ture map comprising inter-category relations as well
as category-feature interactions. Experimental results
on multiple benchmarking datasets show the superi-
ority of the proposed architecture as compared with
the existing methods.
REFERENCES
Bhattacharya, G., Mandal, B., and Puhan, N. B. (2021a).
Interleaved deep artifacts-aware attention mechanism
for concrete structural defect classification. IEEE
Trans. Image Process., 30:6957–6969.
Bhattacharya, G., Mandal, B., and Puhan, N. B. (2021b).
Multi-deformation aware attention learning for con-
crete structural defect classification. IEEE Trans. Cir-
cuits Syst. Video Technol., 31(9):3707–3713.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In Proceedings of ECCV, pages 801–818.
VISAPP 2022 - 17th International Conference on Computer Vision Theory and Applications
572

Chen, W., Zhu, X., Sun, R., He, J., Li, R., Shen, X., and Yu,
B. (2020). Tensor low-rank reconstruction for seman-
tic segmentation. In European Conference on Com-
puter Vision, pages 52–69. Springer.
Gao, Y. and Mosalam, K. M. (2018). Deep transfer learn-
ing for image-based structural damage recognition.
Computer-Aided Civil and Infrastructure Engineer-
ing, 33(9):748–768.
Golparvar-Fard, M., Bohn, J., Teizer, J., Savarese, S., and
Pe
˜
na-Mora, F. (2011a). Evaluation of image-based
modeling and laser scanning accuracy for emerging
automated performance monitoring techniques. Au-
tomation in construction, 20(8):1143–1155.
Golparvar-Fard, M., Pena-Mora, F., and Savarese, S.
(2011b). Monitoring changes of 3d building elements
from unordered photo collections. In 2011 ICCV
Workshops, pages 249–256. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on CVPR, pages 770–778.
Huang, Z., Wang, X., Huang, L., Huang, C., Wei, Y., and
Liu, W. (2019). Ccnet: Criss-cross attention for se-
mantic segmentation. In Proceedings of the IEEE
International Conference on Computer Vision, pages
603–612.
Koch, C., Paal, S. G., Rashidi, A., Zhu, Z., K
¨
onig, M.,
and Brilakis, I. (2014). Achievements and chal-
lenges in machine vision-based inspection of large
concrete structures. Advances in Structural Engineer-
ing, 17(3):303–318.
Kolda, T. G. and Bader, B. W. (2009). Tensor decomposi-
tions and applications. SIAM review, 51(3):455–500.
Liang, X. (2019). Image-based post-disaster inspection of
reinforced concrete bridge systems using deep learn-
ing with bayesian optimization. Computer-Aided Civil
and Infrastructure Engineering, 34(5):415–430.
Liu, B., Gould, S., and Koller, D. (2010). Single im-
age depth estimation from predicted semantic labels.
In 2010 IEEE computer society conference on com-
puter vision and pattern recognition, pages 1253–
1260. IEEE.
Long, J., Shelhamer, E., and Darrell, T. (2015). Fully con-
volutional networks for semantic segmentation. In
Proceedings of the IEEE conference on CVPR, pages
3431–3440.
Lu, R., Brilakis, I., and Middleton, C. R. (2019). Detection
of structural components in point clouds of existing
rc bridges. Computer-Aided Civil and Infrastructure
Engineering, 34(3):191–212.
Miao, X., Wang, J., Wang, Z., Sui, Q., Gao, Y., and Jiang,
P. (2019). Automatic recognition of highway tunnel
defects based on an improved u-net model. IEEE Sen-
sors Journal, 19(23):11413–11423.
Narazaki, Y., Hoskere, V., Hoang, T. A., Fujino, Y., Sakurai,
A., and Spencer Jr, B. F. (2020). Vision-based auto-
mated bridge component recognition with high-level
scene consistency. Computer-Aided Civil and Infras-
tructure Engineering, 35(5):465–482.
Narazaki, Y., Hoskere, V., Hoang, T. A., and Spencer,
B. F. (2017). Vision-based automated bridge com-
ponent recognition integrated with high-level scene
understanding. 13th International Workshop on Ad-
vanced Smart Materials and Smart Structures Tech-
nology (ANCRiSST).
Humans in the loop (2020). Semantic segmentation of
aerial imagery v1. data retrieved on June 01, 2021
from , https://www.kaggle.com/humansintheloop/
semantic-segmentation-of-aerial-imagery.
Saxena, A., Chung, S. H., Ng, A. Y., et al. (2005). Learning
depth from single monocular images. In NIPS, vol-
ume 18, pages 1–8.
Saxena, A., Sun, M., and Ng, A. Y. (2008). Make3d: Learn-
ing 3d scene structure from a single still image. IEEE
transactions on pattern analysis and machine intelli-
gence, 31(5):824–840.
Wang, X., Girshick, R., Gupta, A., and He, K. (2018). Non-
local neural networks. In Proceedings of the IEEE
conference on CVPR, pages 7794–7803.
Yeum, C. M., Choi, J., and Dyke, S. J. (2019). Automated
region-of-interest localization and classification for
vision-based visual assessment of civil infrastructure.
Structural Health Monitoring, 18(3):675–689.
Zhang, F., Chen, Y., Li, Z., Hong, Z., Liu, J., Ma, F., Han, J.,
and Ding, E. (2019). Acfnet: Attentional class feature
network for semantic segmentation. In Proceedings of
the IEEE ICCV, pages 6798–6807.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Pyra-
mid scene parsing network. In Proceedings of the
IEEE CVPR, pages 2881–2890.
Zhu, Z. and Brilakis, I. (2010). Concrete column recogni-
tion in images and videos. Journal of computing in
civil engineering, 24(6):478–487.
StructureNet: Deep Context Attention Learning for Structural Component Recognition
573
