
Tackling Train Routing via Multi-agent Pathfinding and
Constraint-based Scheduling
Ji
ˇ
r
´
ı
ˇ
svancara
a
and Roman Bart
´
ak
b
Charles University, Faculty of Mathematics and Physics, Prague, Czech Republic
Keywords:
Train Routing, Multi-agent Pathfinding, Scheduling, Satisfiability, Constraint Satisfaction.
Abstract:
The train routing problem deals with allocating railway tracks to trains so that the trains follow their timetables
and there are no collisions among the trains (all safety rules are followed). This paper studies the train routing
problem from the multi-agent pathfinding (MAPF) perspective, which proved very efficient for collision-free
path planning of multiple agents in a shared environment. Specifically, we modify a reduction-based MAPF
model to cover the peculiarities of the train routing problem (various train lengths, in particular), and we also
propose a new constraint-based scheduling model with optional activities. We compare the two models both
theoretically and empirically.
1 INTRODUCTION
The classical train timetabling problem involves con-
structing a timetable for (usually) passenger trains re-
specting various constraints such as capacity restric-
tions and service quality. The timetable is constructed
once for a given period, and then the trains follow
it in day-to-day service. However, additional trains
may appear during the daily routine, typically freight
trains with irregular service, and unexpected situa-
tions, such as track closures, accidents, and delays,
may happen. A train dispatcher’s role is to decide if
the trains can move safely through a given area and
allocate specific tracks to the trains. In this paper, we
study the automation of this train routing problem.
The problem is given by a track infrastructure (rail-
way network) and a train timetable describing initial
and target locations of trains with possible stops and
expected departure/arrival times. The task is to al-
locate trains to tracks and times so that there are no
collisions among the trains and the train timetable is
followed.
The train routing problem has been addressed
(partially) in Flatland Challenge (Mohanty et al.,
2020) that has been proposed to answer the question
“How to manage dense traffic on complex rail net-
works efficiently.” Three large railway network op-
erators, Swiss Federal Railways, Deutsche Bahn, and
SNCF, are among the challenge’s organizers, which
a
https://orcid.org/0000-0002-6275-6773
b
https://orcid.org/0000-0002-6717-8175
highlights the importance of the problem. Though the
challenge is specifically designed to foster progress
in multi-agent reinforcement learning, the winning
systems in recent rounds are based on multi-agent
pathfinding technology (Li et al., 2021).
Unlike the Flatland Challenge, we assume trains
of various lengths, which makes the problem more
realistic. We focus less on the dynamics of the en-
vironment with immediate reaction to the current sit-
uation. We emphasize batch processing, where the
tracks need to be allocated for a given set of trains for
a given period. This problem is essential for train dis-
patchers as it provides them the information if (and
how) a given set of trains can go through their area of
control. As the MAPF technology proved success-
ful for the Flatland challenge, we start with modi-
fying the MAPF model to support trains of various
lengths. We identify the reasons why a direct trans-
lation of train movement to MAPF is not possible.
Motivated by a constraint-based scheduling approach
to MAPF (Bart
´
ak et al., 2018) that supports more
general capacity constraints, we propose a constraint
model with optional activities to describe the train
routing problem fully. This declarative model has
the advantage of adding other constraints, for exam-
ple, expressing various safety measures such as train
separation and using various objectives, such as fol-
lowing the train schedule as close as possible. The
paper demonstrates that constraint-based scheduling
with optional activities is a viable approach to address
the train routing problem.
306
Švancara, J. and Barták, R.
Tackling Train Routing via Multi-agent Pathfinding and Constraint-based Scheduling.
DOI: 10.5220/0010869700003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 306-313
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
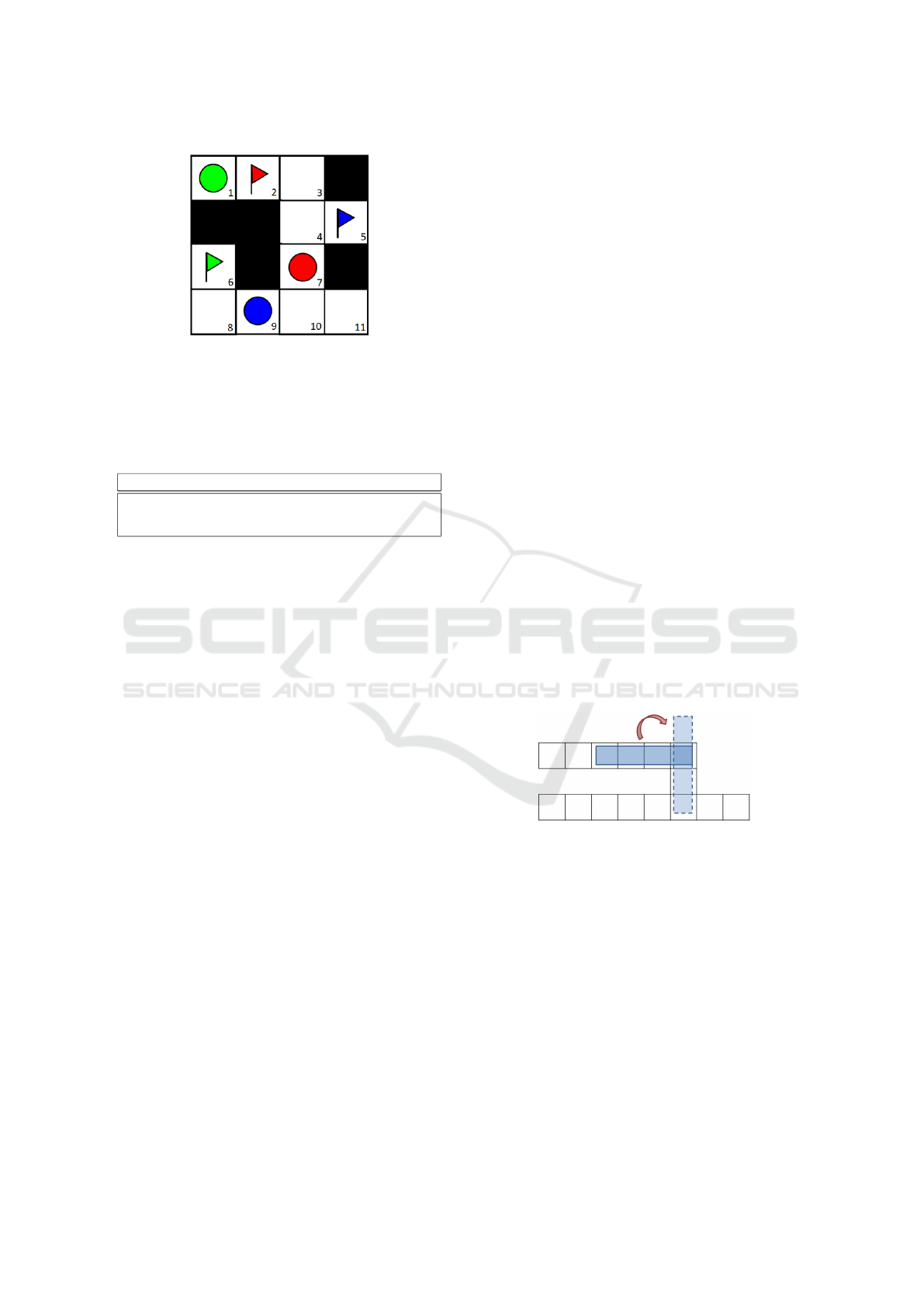
Figure 1: An example of MAPF instance. The white cells
are vertices of a 4-connected grid graph, the colored circles
denote initial locations of the agents, and the colored flags
denote the goal locations of the agents.
Table 1: A solution to the MAPF instance defined in Fig-
ure 1. The numbers correspond to the vertices each agent
occupies at that timestep.
Timestep 0 1 2 3 4 5 6 7 8 9
Agent Green 1 2 3 4 7 10 9 8 6 6
Agent Red 7 4 5 5 4 3 2 2 2 2
Agent Blue 9 10 11 11 11 11 10 7 4 5
2 BACKGROUND on MAPF
The multi-agent pathfinding (MAPF) problem is de-
fined as a pair (G, A), where G is a graph G = (V, E)
and A is a set of agents. Each agent a
i
∈ A is defined as
a pair of vertices a
i
= (s
i
, g
i
) which represent its start-
ing and goal vertex respectively. At each timestep, all
of the agents perform an action synchronously. The
action can be a move action to a neighboring vertex
or a wait action (i.e., staying in the same vertex).
The task is to find a sequence of locations (alter-
natively, a sequence of actions) for each agent such
that no two agents collide with each other. There
are different types of collisions defined in the liter-
ature (Stern et al., 2019). The two most often used
are vertex collision – two agents are present in the
same vertex at the same time, and swapping collision
– two agents are moving on the same edge in the op-
posite directions at the same time. Forbidding these
two collisions ensures that no two agents are present
at the exact physical location simultaneously. We call
this parallel motion since it allows the agent to move
closely one after another like a train, which will be
helpful to us. An example of a MAPF instance can be
seen in Figure 1, while a solution for that instance can
be seen in Table 1. The table states the location for
each agent at each timestep.
We do not provide a formal definition for a train
movement problem since the specific details will arise
from the formalism we use to solve the problem.
However, the task is quite intuitive and close to the
MAPF problem. We are given a shared environment
represented by a graph and a set of trains. Each train
is associated with a given initial position and the de-
sired goal position. In our models, we further assume
that each train may have a different length; therefore,
the train may occupy a different number of vertices
at a given time, each train is of length at least two,
and the trains are not allowed to move backward. The
task is to navigate each train to the desired destination
without any collision with the other trains.
2.1 Modeling Large Agents
The models proposed in this paper are built as an ex-
tension of existing MAPF models. There exist exten-
sions of the classical MAPF model to deal with large
agents, but as we shall show now, these extensions are
inappropriate to model trains of various lengths.
Generalization of MAPF for heterogeneous agents
explores the setting where each agent occupies mul-
tiple vertices in a homogeneous grid map (Atzmon
et al., 2020). With this approach, it is possible to
model a long agent that resembles a train, and while
the algorithm allows for the agent to turn, the agents
are considered to be rigid (i.e., not changing their
shape). This property may cause an instance to be
unsolvable in cases where an agent that may change
shape would be able to find a solution. Such example
can be seen in Figure 2. The trains need to be able to
bend around corners, thus changing the shape.
Figure 2: Example of an instance that is unsolvable for a
rigid agent.
Another approach that deals with agents of vary-
ing size (Andreychuk et al., 2019), considers the
agents to be circular. In the paper, the agents move
continuously, and a collision is detected if any two
agents overlap. It is possible to model a train by a cir-
cle of sufficient diameter. This representation is valid
even on bends; however, two circular agents may col-
lide in places where the physical trains are not present.
See Figure 3 for an example.
Tackling Train Routing via Multi-agent Pathfinding and Constraint-based Scheduling
307

Figure 3: Example of an instance that is unsolvable by rep-
resenting trains as large circular agents. The agents are
moving in opposite directions and the circular agents cause
a collision that would not happened in the physical world.
3 MODELING TRAIN
MOVEMENT
The main difference and the hardness of the problem
arise from the fact that a train may occupy more than
one location at a given time. New constraints need
to be set such that no two trains collide anywhere in
these occupied locations. Furthermore, compared to
the mentioned related work, the shape of the train may
change based on the section of the track the train is us-
ing. There exists an approach called Multi-Train Path
Finding (MTPF) (Atzmon et al., 2019) that is very
close to this problem. However, in MTPF the train ex-
pands from a start node and shrinks to the destination
node, while the trains preserve their length in reality.
We formulate two different approaches to model the
train movement.
3.1 MAPF Model
To model the trains’ movement, we treat each train
as a group of agents T
1
, . . . T
n
such that
S
T
1
,...T
n
= A.
The number of agents in each group is determined
by the length of a given train. The problem is then
to navigate the group to the goal location in such a
way that the agents not only remain connected but
also maintain the structure of the train. More specif-
ically, this means that when the group moves, each
agent moves to the location that was occupied in the
previous timestep by the agent next to it. Similarly,
if the group waits (perform no-op) each agent in the
group waits.
We start by using a MAPF solver based on a re-
duction to Boolean satisfiability (SAT). This solver
models the classical MAPF problem as was defined
in the previous chapter.
Let’s assume that we are looking for a solution to
the MAPF problem with makespan M using the par-
allel motion restriction on allowed conflicts. We de-
fine the following two sets of variables: ∀v ∈ V, ∀a
i
∈
A, ∀t ∈ {0, . . . , M} : At(v, i, t) meaning that agent a
i
is
at vertex v at timestep t; and ∀(u, v) ∈ E, ∀a
i
∈ A, ∀t ∈
{0, . . . , M − 1} : Pass(u, v, i, t) meaning that agent a
i
goes through an edge (u, v) at timestep t. More specif-
ically, it starts traversing the edge at timestep t and
enters the vertex v at timestep t + 1. This is why the
variables are not defined for timestep M. An auxiliary
edge (v, v) is added to E, thus Pass(v, v, i, t) means
that agent a
i
stays at vertex v at timestep t. To model
the MAPF problem, we introduce the following con-
straints:
∀a
i
∈ A : At(s
i
, i, 0) = 1 (1)
∀a
i
∈ A : At(g
i
, i, M) = 1 (2)
∀a
i
∈ A, ∀t ∈ {0, . . . , M} :
∑
v∈V
At(v, i, t) ≤ 1 (3)
∀v ∈ V, ∀t ∈ {0, . . . , M} :
∑
a
i
∈A
At(v, i, t) ≤ 1 (4)
∀u ∈ V, ∀a
i
∈ A, ∀t ∈ {0, . . . , M − 1} :
At(u, i, t) =⇒
∑
(u,v)∈E
Pass(u, v, i, t) = 1 (5)
∀(u, v) ∈ E, ∀a
i
∈ A, ∀t ∈ {0, . . . , M − 1} :
Pass(u, v, i, t) =⇒ At(v, i, t + 1) (6)
∀(u, v) ∈ E : u 6= v, ∀t ∈ {0, . . . , M − 1} :
∑
a
i
∈A
(Pass(u, v, i, t) +Pass(v, u, i, t)) ≤ 1 (7)
Constraints (1) and (2) ensure that the starting and
goal positions are valid. Constraints (3) and (4) en-
sure that each agent occupies at most one vertex and
every vertex is occupied by at most one agent. The
correct movement in the graph is forced by constraints
(5) – (7). In sequence, they ensure that if an agent is
in a certain vertex, it needs to leave it by one of the
outgoing edges (5). If an agent is using an edge, it
needs to arrive at the corresponding vertex in the next
timestep (6). Finally, (7) forbids two agents to tra-
verse two opposite edges at the same time (forbidding
swapping conflict). To find the optimal makespan,
we iteratively increase M until a satisfiable formula
is generated.
To express that the group of agents moves as a
single train, we add the following constraints.
∀j ∈ {1, . . . n}, r ∈ T
j
, ∀a
i
∈ T
j
, a
i
6= r,
∀t ∈ {0, . . . , T −1} :
∑
v∈V
Pass(v, v, r, t) =
∑
v∈V
Pass(v, v, i, t) (8)
∀j ∈ {1, . . . n}, ∀a
i
∈ T
j
, a
i
6= a
l
,
∀t ∈ {0, . . . , T −1}, ∀v ∈ V :
At(v, i, t) = 1 ∧ At(v, i, t + 1) = 0
=⇒ At(v, i + 1, t + 1) = 1 (9)
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
308
Assume that there are n groups of agents (trains).
For each group, we can choose a representative r.
Also to simplify the notation, r is the first agent in the
group, and agents’ indexes are ordered in the same
way as the agents are ordered in the train representa-
tion. This means that agent a
l
in a train of length l
is the agent at the very end. The constraint (8) rep-
resents a situation when the train waits. It ensures
that if one of the agents in that group is using a wait
edge, all of the agents also use wait edges. The con-
straint (9) ensures that if an agent a
i
moves to a new
location (i.e., it is not staying in the same location v
in two consecutive timesteps), the agent behind him,
with the index of +1, moves to the previous location v
of agent a
i
. The constraint that trains are not allowed
to move backward arises from constraint (9) and the
fact that trains are of length at least two – the leading
agent r of the train cannot go back as that vertex is
occupied by the second agent of the train.
Since we are considering that trains are of length
greater than one, we do not need to include the con-
straint (7) that forbids swapping of agents. Swapping
of two trains of length at least two would lead to a
vertex collision.
We provide the constraints as a set of inequalities
rather than a CNF formula since it is more readable
and there are tools that automatically translate such
inequalities into a CNF that is solvable by any SAT-
solver (Bart
´
ak et al., 2017).
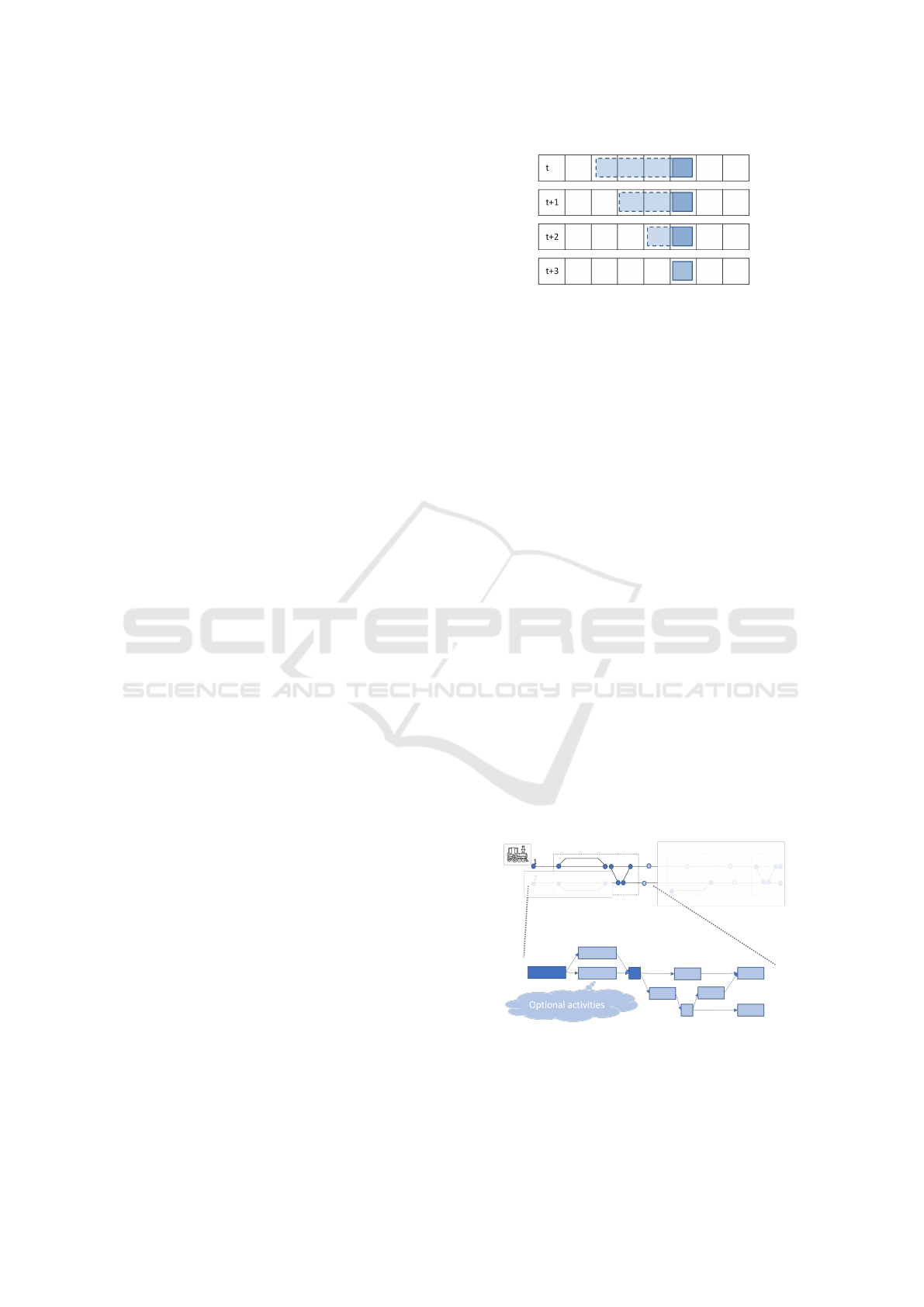
Another idea of how one might try to simulate the
train motion is to use just one agent to represent a
train and use k-robust MAPF (Atzmon et al., 2017).
In this version of MAPF, it is required for each ver-
tex to be empty for at least k timesteps before another
agent may enter it. If k is set as the length of the
longest train, the k vertices behind each agent, where
the rest of the train should be present, are forced to
be empty, thus producing a valid plan. However, a
problem arises when the agent stops. Each timestep
the agent remains stationary the number of unusable
vertices behind the agent decreases by one. Eventu-
ally, if the agent does not move for k timesteps another
agent may move right next to it, which would create a
conflict in the real world. An example can be seen in
Figure 4.
3.2 Scheduling Model
Our scheduling-based model is inspired by a schedul-
ing approach for solving classical MAPF and an
extension of MAPF where edges may be assigned
lengths and capacities (Bart
´
ak et al., 2018).
Similarly, we model the problem in the Con-
straint Programming formalism borrowing ideas from
Figure 4: Example of 3-robust MAPF simulating train of
length 4. The agent is not performing a move action in
timesteps t, . . . , t + 3, thus the length of the simulated train
is ”shrinking”.
scheduling and routing problems. We see the possi-
ble locations as resources with limited capacity. We
use the concept of optional (alternative) activities (La-
borie et al., 2009) with specialized global constraints,
such as NoOverlap, modeling resources.
In contrast to the MAPF model, in our schedul-
ing model, we do not treat each vertex of the input
graph as a single location. This granularity is unnec-
essarily fine. Considering that the railway network
usually consists of long stretches of tracks with no
intersections, we condense these long stretches into
a single location, while intersections, where the train
may change its direction to move to other rail seg-
ments, are kept with the high granularity. Figure 5
shows how a real railway network is converted to a
set of activities for a specific train. Another example
is given in the experimental section in Figure 9 show-
ing how a MAPF-like model of the railway network
is condensed in the scheduling model (vertices corre-
spond to rail segments occupied by transport activi-
ties). Note that this high abstraction is not possible in
the MAPF model, since condensing multiple vertices
into a single one would lose the information on travel
time. This is not an issue for the scheduling model,
because we can assign different durations to activities
modeling the train movement.
Figure 5: Converting a railway network to a set of transport
activities.
Given a set of n trains T
1
, . . . , T
n
and m locations
L
1
, . . . , L
m
created from the original graph G, we cre-
Tackling Train Routing via Multi-agent Pathfinding and Constraint-based Scheduling
309
ate an interval optional variable Traverse(T
i
, L
j
, L
k
)
meaning that train T
i
is traversing location L
j
, coming
from location L
k
. It is needed to know the previous lo-
cation of the train because this can determine what are
the next possible locations and activities (recall that
trains may not simply turn around or go backward),
in other words, the previous location determines the
orientation of the train in the current location. The
activities are interval activities, meaning that they are
assigned duration and may occur in some predefined
time. See Figure 6 for visualization. The duration of
the activity is determined by the length of the train
plus the length of the rail segment and the speed of
the train. The activity directly corresponds to the time
any part of the train is present anywhere in the given
rail segment.
Figure 6: Visualization of an activity duration over the pos-
sible start and end times.
Given a start location L
s
i
of train T
i
, we
write Traverse(T
i
, L
s
i
, −) as the initial activity of
train T
i
. Similarly, we have the final activity
Traverse(T
i
, L
g
i
, L
k
) for a goal location L
g
i
of train T
i
.
In this case, the previous location is needed because
in the problem specification we require the train to ar-
rive in the goal station with specific orientation.
The initial and final activity of each train is re-
quired, we set the following constraints.
∀i ∈ {1, . . . , n} :
PresenceOf (Traverse(T
i
, L
s
i
, −)) = 1 (10)
∀i ∈ {1, . . . , n} :
PresenceOf (Traverse(T
i
, L
g
i
, L
k
)) = 1 (11)
The presence of the other activities is determined
by the solver based on the following constraints.
∀i ∈ {1, . . . , n}, ∀j ∈ {1, . . . , m} :
Alternative(Traverse(T
i
, L
j
, L
k
), Next(T
i
, L
j
, L
k
))
(12)
∀i ∈ {1, . . . , n}, ∀j ∈ {1, . . . , m} :
Alternative(Traverse(T
i
, L
j
, L
k
), Prev(T
i
, L
j
, L
k
))
(13)
The definition of the Alternative constraint, which
gets an interval variable as the first argument and a
set of interval variables as the second argument, is as
follows. If the activity given as the first argument is
present, then exactly one activity from the set of ac-
tivities given as the second argument is present. In
addition, it gives a constraint on the start and end time
of the activities. The constraints (12) and (13) ensure
that if an agent is traversing a location, it will next tra-
verse one of the possible adjacent locations given the
orientation of the train. Similarly, before traversing a
location, the train needed to be traversing one of the
locations that can lead it to the current one. The Pos-
sible transitions between activities need to be figured
out as an input of the model. However, this is easily
done by a simple traversal of the underlying graph.
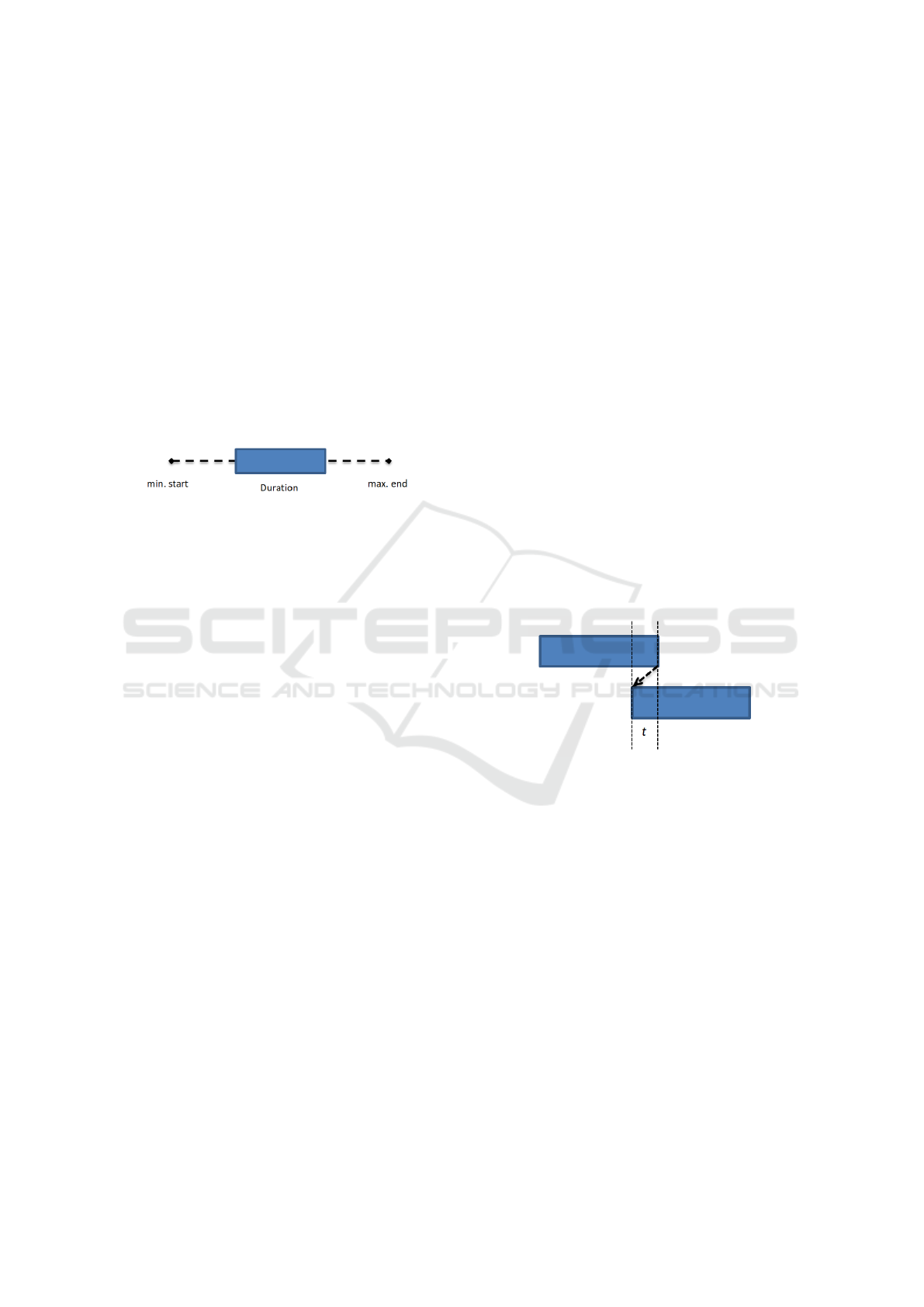
The start and end times of the following activities
need to be set. To ensure the correct movement of the
trains with no swapping of the trains, we introduce
a negative time delay between the two following ac-
tivities. See Figure 7 for an illustration. In the first
activity the train is traversing one rail segment, while
in the other activity, the train is traversing some adja-
cent rail segment. During the t timesteps the train is
performing both activities; the train is in fact occupy-
ing both rail segments at the same time. Therefore this
time delay is determined by the length of the train and
train speed. Basically, it defines the time that the train
needs to pass a border point between two successive
railway segments.
Figure 7: Visualization of two activities being performed
after each other with the negative time delay t.
The negative time delay is enough to enforce no
swapping among the trains. To forbid the trains to oc-
cupy the same location at the same time, we use the
NoOverlap constraint on the activities that occur at
the same location. This constraint ensures that trans-
port activities of different trains for the same rail seg-
ment (location) do not overlap in time – the trains are
not using that segment at the same time.
∀j ∈ {1, . . . , m} :
NoOverlap(
[
T
1
,...,T
n
Traverse(T
i
, L
j
, L
k
) (14)
3.3 Comparison of the Models
The two proposed models both abstract the train
movement; however, there are slight differences be-
tween what is possible to model by each model. The
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
310

MAPF model can express the position of the whole
train at each timestep very precisely. In contrast, the
scheduling model only provides which location (rail
segment) of the network is traversed at each time, but
the train’s exact location at that rail segment is not
given. This degree of imprecision can be changed
based on the granularity of the locations created.
The MAPF model allows the trains to visit any
vertex in the grid any number of times. On the other
hand, the scheduling model allows using each activity
only once. This property means that the train cannot
return to a given location with the same orientation.
This issue can be solved by creating extra activities
with a unique name for the given location to allow the
train to return. A change to the following possible
locations is then needed. However, it is usually not
necessary in a real-world setting for a train to move in
a loop to reach its destination.
While the last two properties were shortcomings
of the scheduling model (the model does not support
planning entirely), this model can represent broader
scenarios than the classical MAPF model. For exam-
ple, by setting the transfer times and duration of each
activity, we can simulate different speeds for each
train. Furthermore, we can impose different travel
speeds for each location. Similarly, we can also sim-
ulate speeding up and slowing down the train in the
locations leading to the stations. Also, required vis-
ited locations may be set by using the PresenceOf
constraint. The exact time of visit is then left to the
solver. On the other hand, if we know in advance the
time window when this required visit needs to occur
(for example, from the given timetable), we can also
set it by changing the minimal start and maximal end
times of the activity.
4 EXPERIMENTAL EVALUATION
To test the proposed modeling methods, we imple-
mented the scheduling approach in the IBM CP Op-
timizer version 12.8 (Laborie, 2009). For the SAT-
based approach we used the Picat language and com-
piler version 2.7b7 (Bart
´
ak et al., 2017). The experi-
ments were run on a PC with an AMD Ryzen 7 4700U
running at 2.00 GHz with 16 GB of RAM. We used a
cutoff time of 300 seconds per problem instance.
4.1 Instances
Classical MAPF techniques are frequently compared
using grid-based benchmark maps (Stern et al., 2019).
However, these maps are far from maps represent-
ing train networks. Flatland challenge maps (Mo-
hanty et al., 2020) describe railway networks, but they
are designed for unit-size agents and do not repre-
sent well stations with multiple platforms. Therefore,
we created three 4-connected grid maps representing
a structure of a rail network inspired by the Flatland
challenge maps, but with more detailed train stations
(see Figure 8). Each of the maps consists of three sta-
tions (represented by the red highlight), each with five
rail tracks of length five units. The stations represent
a location where a train may start and end after the
execution of the found plan. In total there are fifteen
possible starting and goal locations on each map. We
created the maximal number of agents (fifteen) of ran-
dom length between two and five for each map. The
start location was placed at random and the goal loca-
tion was also chosen by random from one of the other
two stations. Note that the orientation of the train is
also an important part of the start and goal location.
This process was done five times with different ran-
dom seeds. Each instance is then created by consid-
ering a different number of trains, from one to fifteen,
on the given map. In total, this produces 225 different
instances.
The representation for the MAPF model is quite
straightforward. Each vertex in the map represents a
location. Each train with length l consists of l agents
with assigned start and goal locations such that the
orientation of the train is maintained.
For the scheduling model, we first needed to split
the grid map into locations. If each vertex was a sin-
gle location, we would lose the strength of the model,
so instead, we considered a sequence of vertices with
only two neighbors as a single location. Example of
such transformation of map Linear can be seen in Fig-
ure 9. Note that this transformation is only needed due
to comparison with the MAPF-like approach. In real-
ity, the railway network is given as a graph of tracks
(Figure 5).
Over each of the locations, an activity was created
for each train. The minimal start and maximal end of
the activity were set to 0 and an upper bound on the
whole plan. The duration of the activity was set as the
length of the train plus the length of the location (i.e.,
the number of vertices in that location). The transfer
time was set as the length of the train. Using clever
preprocessing, the bounds on the start and end times
of the activity may be improved, however, in our ex-
periments, we did not find this to be the bottleneck for
the solver.
Since the two models do not provide exactly the
same solutions, as we discussed at the end of the last
section, and we do not look for an optimal solution,
we do not increase the upper bound on makespan T
in the SAT model by 1. Rather, we increase the T
Tackling Train Routing via Multi-agent Pathfinding and Constraint-based Scheduling
311
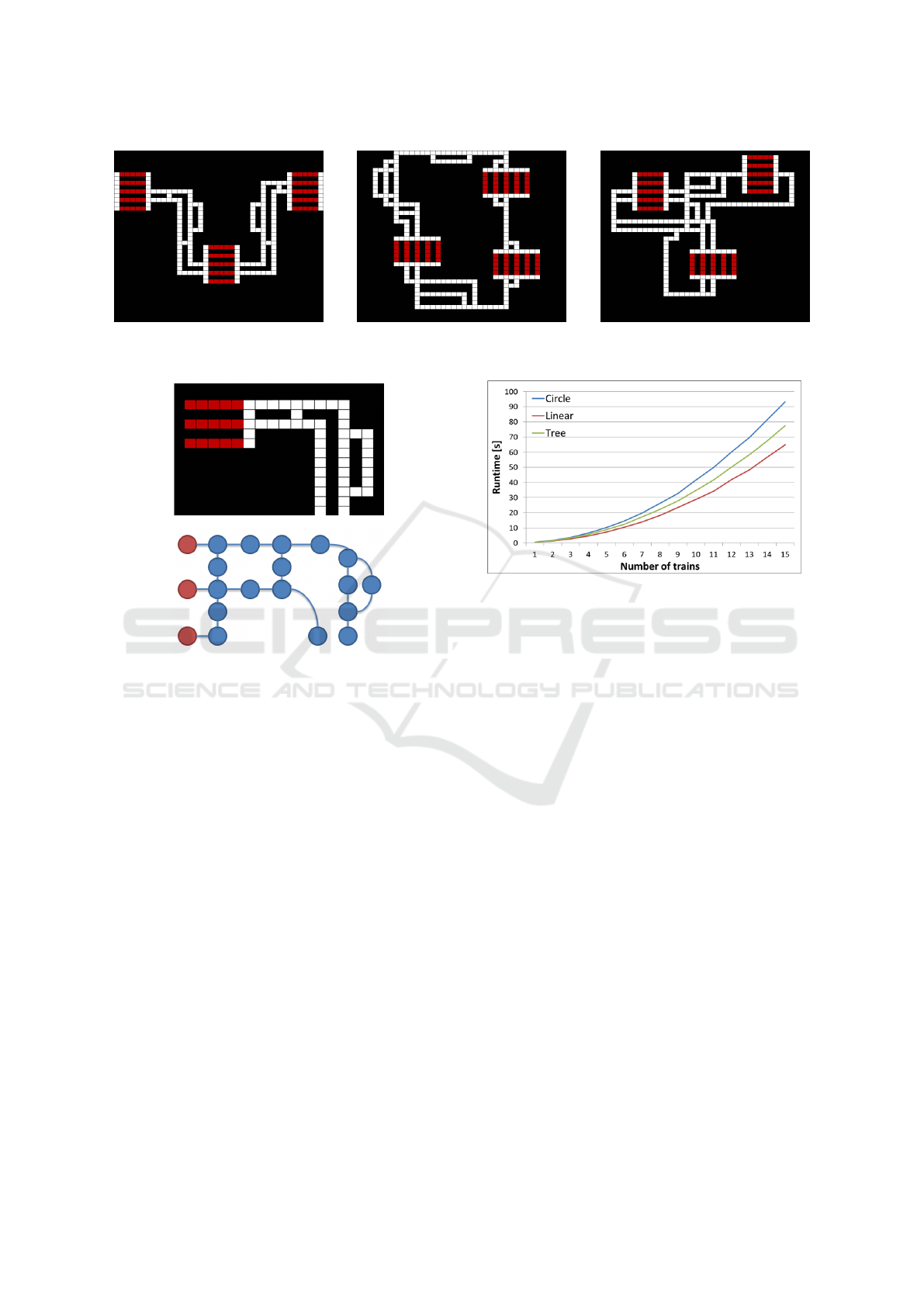
(a) Linear. (b) Circle. (c) Tree.
Figure 8: Maps used in the experiments.
Figure 9: In the top is part of the Linear map. On the bottom
is its representation as locations that the scheduling model
uses. Note that the long sequences of vertices with just two
neighbours are abstracted as a single location.
by the length of the longest train, which is five in our
instances. The reasoning behind this is that if there
is no solution in a given lower bound on makespan, it
may be caused either by a conflict of two trains or by
the fact that a train is required to arrive at the station
from a different direction. Waiting for a train to free
a given vertex takes the same number of timesteps as
is the length of the train. Arriving at a station from a
different direction means going around the station. In
both cases increasing the T by just 1 would not help.
Of course, this approach does not guarantee finding
a makespan-optimal solution, but it should be able to
find a solution in less computational time.
4.2 Results
Out of the 225 instances, the SAT MAPF model was
able to solve only 38 with the most trains solved be-
ing 5 on map Tree. On the other hand, the scheduling
model was able to solve all of the instances using just
a fraction of the allowed runtime. Figure 10 shows the
Figure 10: Measured runtime for the scheduling approach.
The presented values are average runtime of instances with
a given number of agents.
average runtime per number of trains. The results are
split for the three different types of maps. From these
results, we can see that the runtime increases with the
number of trains being present in the graph, as is ex-
pected. We also observe that the different structure of
the maps gives a clear ordering in hardness of the in-
stances with Linear being the easiest, while Circle is
the hardest. We can observe the same ordering in the
SAT model results.
Such poor performance by the SAT-based model
was not expected. We performed the experiments
again without the constraint on agents modeling a
train to remain connected. Thus a classical MAPF
problem was being solved. This relaxation was able
to solve 111 instances out of 225. This is a substan-
tial improvement, however, it is still far away from
solving all of the instances as the scheduling model is
able to. From this result, we can draw the conclusion
that the added constraints on the train movement are
hard for the solver. Furthermore, we can see that this
type of instance is hard even for classical MAPF. In-
deed, when 13 trains are present (which was the maxi-
mal number solved in this experiment by the classical
MAPF algorithm), there are up to 65 single agents on
the map. The map itself provides a challenging envi-
ronment where the agents do not have much space to
avoid each other.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
312

5 CONCLUSION
In this paper, we studied the problem of train routing
in a shared environment. We proposed two models.
The first one is based on a classical MAPF reduction-
based approach. In this approach, each train is mod-
eled as a group of agents moving to the goal loca-
tion in a connected manner, simulating the position
of the whole train. Our second model is inspired by a
scheduling problem, where the graph is split into con-
tinuous locations – rail segments. Each activity rep-
resents a traversal of a given location by a train. The
activities are intertwined in such a manner to ensure
that the trains do not perform a forbidden movement;
specifically, they do not occupy the exact physical lo-
cation at the same time.
We compared the two models by their ability to
model the real world. It seems that the scheduling
model can represent a wider variety of real-world at-
tributes, such as different speeds in any segment of
the rail network. On the other hand, it is more com-
plicated to create the instance for this model automat-
ically from the grid-like MAPF maps
We also evaluated the models empirically and
found that the MAPF model does not scale well over
instances with just a few trains. On the other hand, the
scheduling model solved all of the instances in just a
fraction of the allocated runtime, showing great po-
tential.
ACKNOWLEDGEMENTS
This research is supported by the Czech-USA Coop-
erative Scientific Research Project LTAUSA19072.
REFERENCES
Andreychuk, A., Yakovlev, K. S., Atzmon, D., and Stern, R.
(2019). Multi-agent pathfinding with continuous time.
In Kraus, S., editor, 28th International Joint Confer-
ence on Artificial Intelligence (IJCAI), pages 39–45.
ijcai.org.
Atzmon, D., Diei, A., and Rave, D. (2019). Multi-train
path finding. In Surynek, P. and Yeoh, W., edi-
tors, 12th International Symposium on Combinatorial
Search (SOCS), pages 125–129. AAAI Press.
Atzmon, D., Felner, A., Stern, R., Wagner, G., Bart
´
ak,
R., and Zhou, N. (2017). k-robust multi-agent path
finding. In Fukunaga, A. and Kishimoto, A., edi-
tors, 10th International Symposium on Combinatorial
Search (SOCS), pages 157–158. AAAI Press.
Atzmon, D., Zax, Y., Kivity, E., Avitan, L., Morag, J.,
and Felner, A. (2020). Generalizing multi-agent path
finding for heterogeneous agents. In Harabor, D. and
Vallati, M., editors, 13th International Symposium on
Combinatorial Search (SOCS), pages 101–105. AAAI
Press.
Bart
´
ak, R., Svancara, J., and Vlk, M. (2018). A scheduling-
based approach to multi-agent path finding with
weighted and capacitated arcs. In Andr
´
e, E., Koenig,
S., Dastani, M., and Sukthankar, G., editors, 17th In-
ternational Conference on Autonomous Agents and
MultiAgent Systems (AAMAS), pages 748–756.
Bart
´
ak, R., Zhou, N.-F., Stern, R., Boyarski, E., and
Surynek, P. (2017). Modeling and solving the multi-
agent pathfinding problem in picat. In 29th IEEE In-
ternational Conference on Tools with Artificial Intel-
ligence (ICTAI), pages 959–966. IEEE Computer So-
ciety.
Laborie, P. (2009). IBM ILOG CP optimizer for detailed
scheduling illustrated on three problems. In van Ho-
eve, W. J. and Hooker, J. N., editors, 6th Interna-
tional Conference on Integration of AI and OR Tech-
niques in Constraint Programming for Combinatorial
Optimization Problems (CPAIOR), volume 5547 of
Lecture Notes in Computer Science, pages 148–162.
Springer.
Laborie, P., Rogerie, J., Shaw, P., and Vil
´
ım, P. (2009). Rea-
soning with conditional time-intervals. part ii: An al-
gebraical model for resources. In 22nd Florida AI Re-
search Society Conference (FLAIRS), pages 201–206.
Li, J., Chen, Z., Zheng, Y., Chan, S., Harabor, D., Stuckey,
P. J., Ma, H., and Koenig, S. (2021). Scalable rail plan-
ning and replanning: Winning the 2020 flatland chal-
lenge. In Biundo, S., Do, M., Goldman, R., Katz, M.,
Yang, Q., and Zhuo, H. H., editors, 31st International
Conference on Automated Planning and Scheduling
(ICAPS), pages 477–485. AAAI Press.
Mohanty, S. P., Nygren, E., Laurent, F., Schneider, M.,
Scheller, C., Bhattacharya, N., Watson, J. D., Egli,
A., Eichenberger, C., Baumberger, C., Vienken, G.,
Sturm, I., Sartoretti, G., and Spigler, G. (2020).
Flatland-rl : Multi-agent reinforcement learning on
trains. CoRR, abs/2012.05893.
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. K. S., Bart
´
ak, R., and Boyarski, E. (2019). Multi-
agent pathfinding: Definitions, variants, and bench-
marks. In Surynek, P. and Yeoh, W., editors, 12th
International Symposium on Combinatorial Search
(SOCS), pages 151–159. AAAI Press.
Tackling Train Routing via Multi-agent Pathfinding and Constraint-based Scheduling
313
