
Types of Flexible Job Shop Scheduling: A Constraint Programming
Experiment
Erich C. Teppan
1,2 a
1
Universit
¨
at Klagenfurt, Austria
2
Fraunhofer Austria - KI4Life, Austria
Keywords:
Flexible Job Shop Scheduling, Constraint Programming, Empirical Evaluation.
Abstract:
The scheduling of jobs is a crucial task in every production company and becomes more and more important
in the light of the fourth industrial revolution (Industry 4.0) that aims at fully automated processes. One
such problem formulation with big practical relevance is the flexible job shop scheduling problem (FJSSP).
Since the classic problem formulation is more general than what can be found in most of nowadays industrial
environments, this paper introduces different types of flexibility and investigates how the flexibility type, the
amount of allowed flexibility and the presence of machine dependent processing times influence the solution
quality that can be achieved by a state-of-the-art constraint solver within limited time. Results show that
certain forms of flexibility, higher flexibility factors and the absence of machine dependent processing times
can ease the problem.
1 INTRODUCTION
Scheduling and particularly the scheduling of jobs
(Blazewicz et al., 2014) has been an active field of re-
search at least since the mid of the last century (Muth
and Thompson, 1963; Johnson, 1953; Manne, 1960;
Bowman, 1959). In the industrial context schedul-
ing has become more important than ever in the light
of Industry 4.0 (also sometimes called the fourth in-
dustrial revolution) which aims at full automation and
digitization of processes, in particular production pro-
cesses (Lasi et al., 2014). Among the various defini-
tions of different scheduling problems the flow shop
scheduling problem (FSSP) (Johnson, 1953) and the
job shop scheduling problem (JSSP) (Brucker and
Schlie, 1990; Brucker and Jurisch, 1993; Applegate
and Cook, 1991) play an especially important role for
production plants. Both, FSSP and JSSP, are known
to be NP-hard problems (Garey et al., 1976).
Informally spoken, the problems can be described
as follows: In FSSP and JSSP a set of jobs is to be
accomplished by a set of machines (or resources in
general). A job can be thought of as the production
process carried out to create a certain product. This
process, i.e. the job, is sub-divided into job operations
each of which has to be performed by a dedicated ma-
chine and possesses a predetermined processing time
a
https://orcid.org/0000-0001-8397-9303
on the assigned machine (preemption is not allowed).
Hence, the machine and the corresponding process-
ing time for each job is part of the input. The prob-
lem consists in ordering the job operations on each
machine such that some optimization criterion is opti-
mized, e.g. minimization of the total completion time.
What makes the FSSP different from the JSSP is that
the order in which jobs go through the different ma-
chines is the same for all jobs (though the processing
times can vary). Take as an explanatory example for
a FSSP a bakery. In principle, every bread has to go
through the same production steps in the same order
although recipes and related processing times differ
for different products. In the JSSP, the order in which
jobs go through the machines differ between jobs. Ex-
amples for that can be found in factories where dif-
ferent types of products are produced (e.g. for some
products the cutting operation might be before the
screwing operation and for other products it might be
the other way round). Thus, the FSSP can be seen as a
special of the JSSP. For the classic JSSP (and as well
for the FSSP) for each operation there exists only one
possible machine which can/must execute it. Thus,
there is no guessing about operation-to-machine as-
signments. However, for many real scenarios these
assumptions are to restrictive.
The flexible job shop scheduling problem (FJSSP)
(Chaudhry and Khan, 2015) is a direct generalization
516
Teppan, E.
Types of Flexible Job Shop Scheduling: A Constraint Programming Experiment.
DOI: 10.5220/0010849900003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 3, pages 516-523
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

of the JSSP allowing more than one machine for a job
operation, also with different processing times for the
same operation. This introduces the routing problem,
hence, the assignment of job operations to machines
is not predetermined and is part of the solution and
not part of the input as for the JSSP. Although, the
JSSP as well as the FJSSP are NP-hard and their deci-
sion problem versions
1
are NP-complete, the FJSSP is
widely assumed to be generally harder than the JSSP
because of the additional routing sub-problem. This
view is supported by the fact that by increasing the
flexibility (i.e. more than one machine could perform
a job operation) also the number of possible (though
not forcibly optimal) schedule solutions is increased
at the same time. Consequently, the search space for
an optimal schedule is bigger.
However, from a practical point of view, some as-
pects could ease the problem significantly:
1. First of all, for many application areas there are
not (significantly) different processing times for
the same operation on different machines. Take
as a simple example the bakery described above.
How long an operation takes is dependent on the
type of bread but not on the type of the oven.
2. A second important point where the FJSSP allows
more generality than needed for many application
areas is that in the FJSSP there are no restrictions
on which machines can perform the same oper-
ations and as a matter of fact typical benchmark
problems use totally random machine sets. In real
application scenarios, though, the reason why a
certain amount of flexibility for machine assign-
ment is possible is that machines are similar or
equal. As a consequence, they can execute the
same set of operations and, thus, implement par-
allelism.
3. A third issue that is not taken into account when
stating that the FJSSP is harder than the JSSP is
the question of optimality. It is rather intuitive
that in the worst case to find an optimal solu-
tion for a FJSSP is harder than for a JSSP due
to the bigger search space. However, most of-
ten in real application environments absolute op-
timality is not needed and near-optimal solutions
are enough. The bigger search space should also
increase the number of good enough solutions so
that it is not clear whether higher flexibility fac-
tors really increase hardness when searching only
a near-optimal solution.
1
Deciding whether there exists a solution with an ob-
jective value equal or better than some given constant (e.g.
completion time ≤ κ).
In this paper we try to identify easier classes of
FJSSP from a practical constraint solving point of
view. To this end, we introduce different types of
flexibility and report on an experiment based on prob-
lem instances derived from a large scale JSSP bench-
mark suite (Da Col and Teppan, 2021) where we sys-
tematically change flexibility factors, types of flexi-
bility and whether processing times are machine de-
pendent or not. For solving the problem instances
we use constraint programming (CP) out of three rea-
sons: First of all, CP has a long and successful history
in solving job scheduling problems (Fox et al., 1982;
Fox et al., 1989; Sycara et al., 1991; Sadeh and Fox,
1996; Keng and Yun, 1989; Rodler et al., 2021). Sec-
ond, CP solvers are currently the strongest for solving
scheduling problems, with IBM’s CP Optimizer and
Google’s OR Tools leading the way (Laborie et al.,
2018; Da Col and Teppan, 2019a; Da Col and Tep-
pan, 2019b). The third important reason is that in CP
it is possible to give a worst case estimation on how
far some current best solution is off the optimum since
lower and upper bounds are inherently calculated by
constraint propagation techniques. This is crucial for
many real life problems for which optimal solutions
are generally out of reach.
The further reading is as follows: In Section 2 we
formally define the FJSSP and some special flexibility
types that are sufficient for many real life application
scenarios. In Section 3 we discuss a state-of-the-art
constraint model to be used with IBM’s CP Optimizer.
In Section 4 we present an empirical evaluation that
analyzes the impact different types of flexibility, the
amount of allowed flexibility and machine dependent
processing times have on the proven quality of (near-
) optimal solutions found within limited calculation
time.
2 THE FLEXIBLE JOB SHOP
SCHEDULING PROBLEM
The flexible job shop scheduling problem (FJSSP)
can be defined as follows:
Definition 1. Given a set of machines M =
{m
1
, . . . , m
v
} and a set of jobs J = { j
1
, . . . , j
w
}:
(1) Each job j ∈ J consists of a sequence of opera-
tions O
j
= { j
1
, . . . , j
l
j
} whereby j
l
j
is the last op-
eration of job j.
• For a job j and its operation j
i
, the operation
j
i+1
is called successor, and the operation j
i−1
is called predecessor.
• We refer to the set of all operations as
O =
S
j∈J
O
j
Types of Flexible Job Shop Scheduling: A Constraint Programming Experiment
517

(2) For each operation o, there is a non-empty set of
machines M
o
⊆ M representing the machines that
are able (or allowed) to process operation o.
• We refer to the maximum size of the operations’
machine sets max{|M
o
| : o ∈ O} as the prob-
lem’s flexibility factor f lex.
(3) For each operation o ∈ O and machine m ∈ M
o
,
there is a predefined processing time time
o,m
∈ N.
(4) A (consistent and complete) schedule consists of
an assigned machine m
o
∈ M
o
and a start time
start
o
∈ N for each operation o ∈ O such that:
• An operation’s successor starts only after the
operation is finished:
start
j
i+1
≥ start
j
i
+ time
j
i
,m
j
i
• Operations on the same machine do not over-
lap:
start
o1
≤ start
o2
−→ start
o1
+ time
o1,m
o1
≤
start
o2
(5) An objective function is optimized.
• One of the most classic optimization criteria in
this context is the completion time C
max
, that is
the time span needed for processing all opera-
tions:
minimize max{start
o
+ time
o,m
o
: o ∈ O}
The FJSSP is strongly NP-hard. Already the job
shop scheduling problem (JSSP), being a special case,
is strongly NP-hard (Garey et al., 1976). As in the
JSSP for each operation there exists only one machine
that can process it, the JSSP can be seen as a FJSSP
with flexibility factor f lex = 1.
Observation 1. Definition 1 (2) does not specify
how machine sets M
o
⊆ M are composed and why.
In real production environments operations and ma-
chines are tied together via the concept of operation
types. Each operation o possesses a type t
o
∈ T and
a machine m supports one or more operation types
T
m
⊆ T . A machine m can process an operation o if
(and only if) t
o
∈ T
m
.
Depending on the actual production line layout
and machine capabilities, the concept of operation
types offers the possibility of identifying different
types of flexibility that can be present and we expect
this to have a significant impact on the hardness of a
FJSSP.
Observation 2. In many cases, the processing times
for a certain operation is the same for every machine
that can process it (or differences are small and can
be neglected). Consequently, there would be only one
machine independent processing time (time
o
) for each
operation o instead of machine dependent processing
times (time
o,m
, compare Definition 1 (3)).
With respect to Observation 1 we introduce three
special types of flexibility in job shops, which can
be found in nowadays industrial production environ-
ments (see Figure 1).
Imagine a classic job shop, i.e. a production envi-
ronment with exactly one machine for each operation
type (Figure 1-a). Now it is possible to flexibilize this
job shop by adding new machines such that multiple
machines operate in parallel for the same operation
type (Figure 1-b). In this case, although the number of
possible machines for an operation type increases, the
number of operation types a machine supports does
not increase.
Another common shop configuration that can be
found are closed machine sets (Figure 1-c). In this
case, machines support multiple operation types and
can be sub divided into closed subsets containing ma-
chines with the same capabilities.
Another shop configuration is given when multi
purpose machines have asymmetric capabilities, thus
do not form closed machine sets, yet are linked by
their capabilities (Figure 1-d). In the most extreme
case this forms a chain where there is a machine that
supports type A and B, the second machine supports
type B and C, the third type C and D and so on.
All of those different FJSSPs remain NP-hard as
they all contain the classic JSSP as a special case that
is strongly NP-hard itself. The basic question treated
in this paper is how increased flexibility factors, the
flexibility type (see Figure 1) and machine dependent
processing times (see Observation 2) influence the
hardness of the FJSSP (in particular for CP solvers
as they are currently the means of choice for job shop
scheduling problems).
3 CP MODEL
A state-of-the-art CP model for the FJSSP expressed
in IBM’s modelling language OPL
2
is depicted in
Listing 1.
1usi n g CP ;
2
3tup l e pa r amsT {
4int nb J ob s ; int nb M ch s ;
5};
6
7tup l e O p er ati o n {
8int opId ; i n t jobI d ; in t p o s ;
9};
10
11tup l e Mode {
12int opId ; i n t m c h ; in t pt ;
2
https://www.ibm.com/docs/en/icos/20.1.0?topic=opl-
optimization-programming-language
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
518
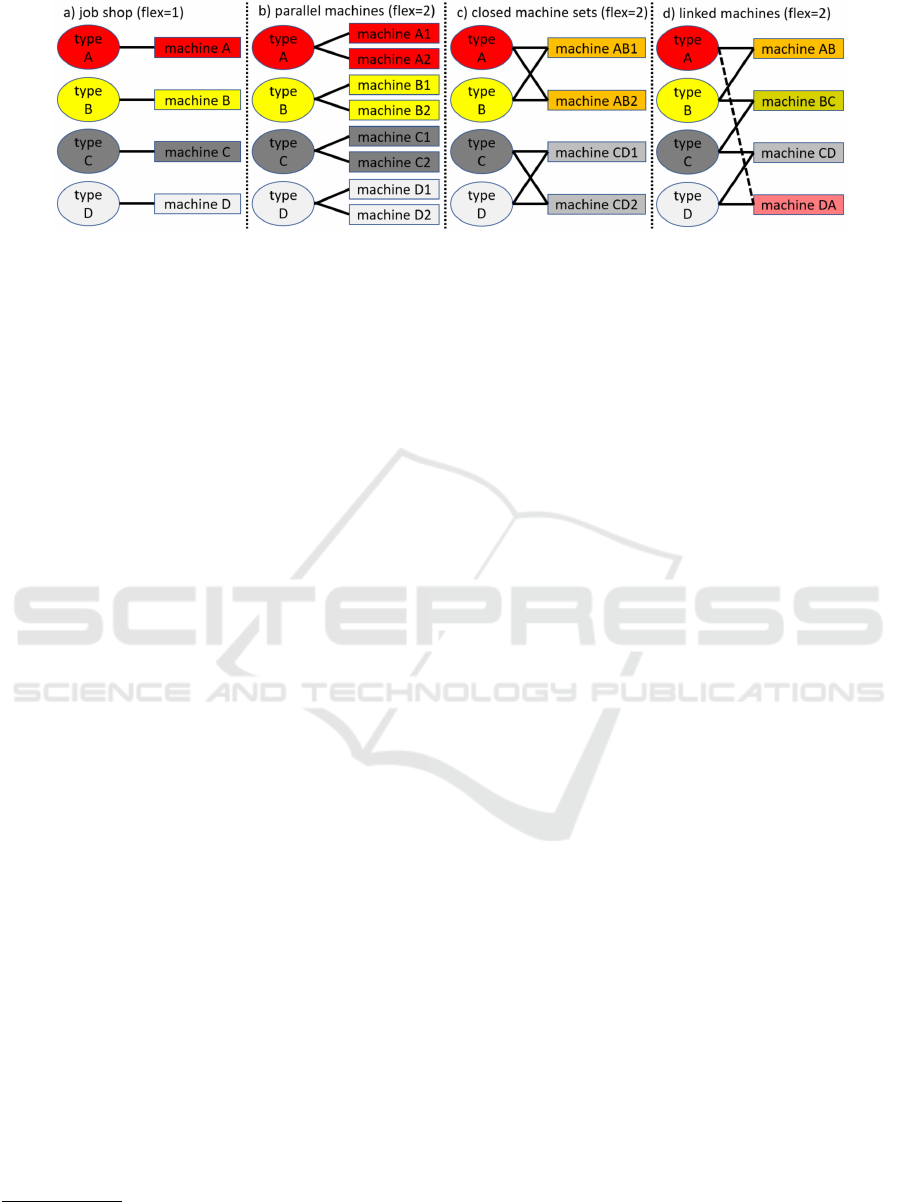
Figure 1: Different types of flexibility in job shops with flexibility factor f lex = 2.
13};
14
15pa r am sT Pa r a ms = . . .;
16{ Op er ati o n } Ops = . . .;
17{ Mode } Mod e s = . . . ;
18
19ran g e Jobs = 1.. Par a ms . n bJ ob s ;
20ran g e Mchs = 1.. Par a ms . n bM ch s ;
21
22i n t j la st [ j in J o b s ] = max (o in Ops :
o . j o bI d == j) o . pos ;
23
24d va r in t er val ops [ O p s ] ;
25d va r in t er val m od e s [md in M o d es ]
op t io nal s i ze md . pt ;
26d va r se q ue nce m c hs [ m in Mc h s ] in
all ( md in M od e s : md . mc h == m )
mod e s [ md ];
27
28mi n imi z e ma x ( j in Jobs , o in Ops :
o . pos == j l as t [ j ] ) e n dO f ( ops [ o ]) ;
29
30su b je ct to {
31f o r al l ( o in Ops )
32al t ern at ive ( ops [ o ], a l l ( md in
Mod e s : md . opId == o. opId ) mode s [ md ]) ;
33f o r al l ( m in Mc h s )
34no O ver l ap ( mchs [ m ]) ;
35f o r al l ( j in Jobs , o1 in Ops , o2 in
Ops : o1 . jo b I d == j && o2 . jobI d == j
36&& o2 . po s ==1+ o 1 . po s )
en dBe f ore Sta r t ( ops [ o1 ] , ops [ o2 ]) ;
37}
Listing 1: OPL encoding of the flexible job-shop scheduling
problem (FJSSP).
Line 1 states that the CP library is used
3
. Lines
3-18 define three tuple data types
4
(paramsT, Opera-
tion, Mode) to be filled with the Params tuple, an Ops
tuple or a Modes tuple from the input file. Lines 20-22
do the actual read-in of the input data. In particular,
the Params tuple from the input is read into the vari-
able of type paramsT, the Ops tuples are read into a
variable that takes a set of Operation tuples and ana-
3
OPL also supports other types of programs.
4
This is similar to structs in the C language.
log for the Modes tuples. Modes actually represent
the set of possible machines for an operation.
In Lines 24 and 25 two integer ranges are defined
for reuse with array data structures and loops. In Line
27 an integer array is defined and initialized that saves
the last job positions for all jobs, corresponding to a
pointer to the last operation in a job. Up to here, the
encoding is concerned with the read-in of the input
and some preparations for convenience reasons.
The rest of the encoding, Lines 29-41, contains
the actual declarative problem representation. In Line
29, an array of interval variables is defined so that for
each Operation in Ops there is an interval variable.
Note that the domains are not set explicitly such that
the lower bound is 0 and the upper bound is set auto-
matically by the solver.
In Line 30, an array of interval variables for each
mode is defined. Those variables also take the pro-
cessing times as input (i.e., size md.pt). Hence, there
is an interval variable for each possible operation-to-
machine combination. Recall that it is not clear be-
forehand to which machine a particular operation will
be assigned to. For this reason, the variables are set
as optional, which means that they can be active or
not, depending on whether an operation is assigned to
a specific machine or not.
The interval variables for operations (Line 29) and
the (optional) interval variables for the modes are
linked together in Lines 36-37. The alternative state-
ments express that among all possible alternatives for
an operation variable, i.e., all corresponding mode
variables, exactly a single one can be active. The op-
eration variable’s start, end and processing time val-
ues are set equal to its active alternative. The ques-
tion about which alternative to set active is part of the
problem and to be determined by the solver.
In Line 31, an array of helping sequence variables
is defined, each of which stores a list of modes (i.e.
operation assignments) for a machine. Those vari-
ables are used in Lines 38-39 for establishing noOver-
lap constraints, assuring that a machine can process
only one operation at a time. Finally, Lines 40-41
Types of Flexible Job Shop Scheduling: A Constraint Programming Experiment
519

define constraints that guarantee that each successor
operation can start only after its preceding operation
has finished.
4 EVALUATION
We conducted an experiment in order to investigate
the following research questions:
• How does the type of flexibility in job shops (see
Section 2) impacts on FJSSP hardness?
• Does FJSSP becomes harder or easier with in-
creased flexibility factors?
• Is there a difference between having one process-
ing time per operation or having one processing
time per operation-machine combination (i.e. ma-
chine dependent vs. machine independent pro-
cessing times)?
As IBM’s CP Optimizer is currently (at least one
of) the most powerful solver(s) for scheduling prob-
lems, in particular job shop scheduling problems (La-
borie and Rogerie, 2016; Laborie et al., 2018; Laborie
and Godard, 2007; Da Col and Teppan, 2019b), we
implemented the model in Section 2 to be used with
CP Optimizer. Since it is also possible to interface
via Java (and C++) with CP Optimizer, we imple-
mented the model in Java, instead of directly using
the OPL program. The intuition behind was to use a
single language for all experimental components, i.e.
the model, the benchmarking routines and the system-
atic creation of new benchmark problem instances.
Dataset. In order to give first answers to our re-
search questions and systematically investigate the ef-
fects of the actual type of flexibility (Observation 1,
Figure 1), different flexibility factors, or whether pro-
cessing times for operations vary depending on the
machine that execute them or not (Observation 2),
novel benchmark problems were used.
As a starting point we used the 100x100 JSSP in-
stances from (Da Col and Teppan, 2021) as they are
on the one hand conceptually similar to Taillard’s fa-
mous benchmark (Taillard, 1993) but bigger in size
(100 jobs on 100 machines = 10000 operations), and
thus better reflect nowadays industrial realities. For
these instances we built different variants, that dif-
fer in the used type of flexibility (random, parallel,
closed, linked), the flexibility factor ( f lex = 1, f lex =
2, f lex = 4), and whether processing times of opera-
tions are machine dependent or not.
In order to produce random FJSSP instances,
for each operation o, its machine set M
o
was com-
posed of the machine to which o was assigned to
in the original JSSP instance and the remaining ma-
chines (e.g. with flex=4 there are three remaining
machines) were chosen randomly, avoiding doublets.
In order to produce parallel FJSSP instances (com-
pare Figure 1), for each machine m, f lex − 1 ad-
ditional machines were defined. For each opera-
tion o, its machine set M
o
was composed of m and
the f lex − 1 additional machines. Closed machine
sets were produced by partitioning the set of ma-
chines in the original JSSP into sets of size f lex,
i.e. {{m
1
, ..., m
f lex
}, {m
f lex+1
, ..., m
2∗ f lex
}, ...}. For
each operation o, its machine set M
o
was com-
posed of the closed machine set containing the ma-
chine it was assigned to in the original JSSP in-
stance. Similarly, for creating linked FJSSP in-
stances, for each operation o assigned to m
i
in the
original JSSP instance, the machine set M
o
was com-
posed as {m
i
, m
i+1
, ..., m
i+ f lex−1
}. For the prob-
lem instances without machine dependent processing
times, the original processing times were used for
all machines in an operation’s machine set. For the
problem instances using machine dependent process-
ing times, random offsets between 0% and 100% were
added to the original processing times.
Experimental Setting. The experiment was con-
ducted on a system equipped with a 2 GHz AMD
EPYC 7551P 32 Cores CPU and 256 GB of RAM
5
.
As a CP solver CP Optimizer 12.10 was employed
and configured to use a single worker thread. We
defined a 1000 seconds timeout and measured the
(relative) objective gap in the end. The objec-
tive gap, which can be directly retrieved from CP
Optimizer, represents a worst case estimation of
how much a current solution is above the optimum
(
ob jectiveValue−lowerBound
ob jectiveValue
). An optimal solution has a
gap of zero.
Results. Table 1 depicts all measured results. Fig-
ure 2 visualizes the average gaps for the different
classes of FJSSP instances. Having a flexibility factor
of f lex = 1, the type of flexibility (random, closed,
linked, parallel) does not make any difference as
it always boils down to the same non flexible JSSP
(gaps around 30% off the optimum). However, higher
flexibility have different impacts on the measured
objective gaps depending on the type of flexibility
and whether processing times are machine dependent
(∗Di f f Times) or not:
In all settings the objective gaps shrinked with
increased flexibility factors except for closed ma-
5
Memory usage for one experimental run was always
below 16GByte.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
520
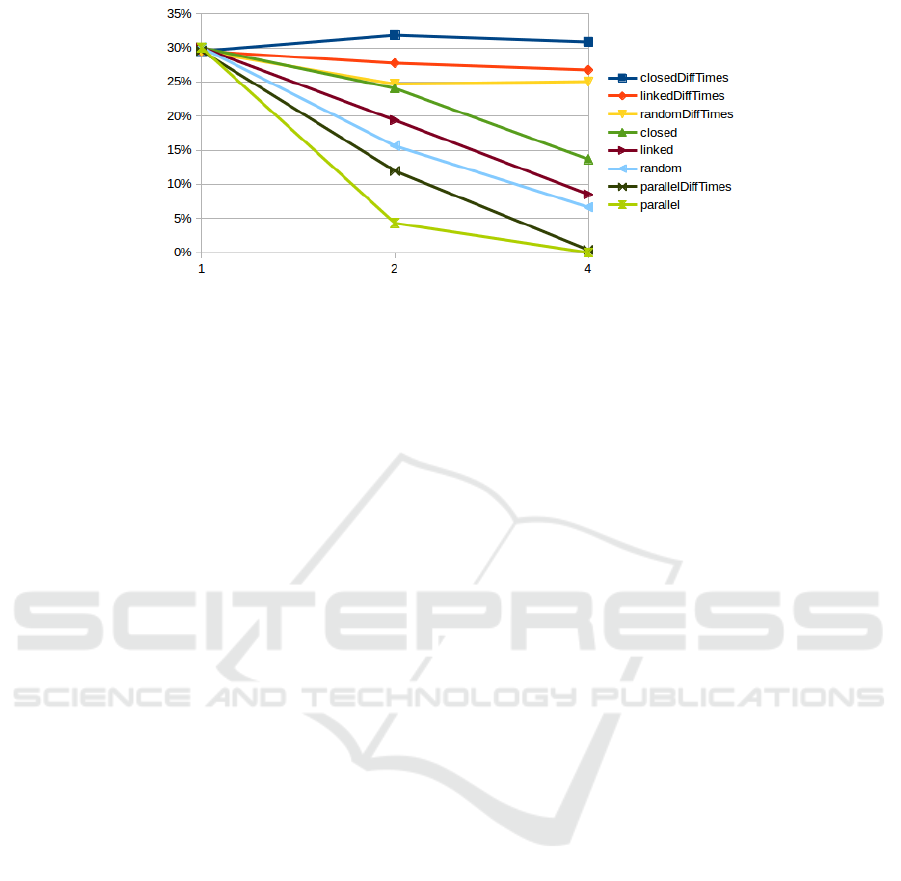
Figure 2: Average objective gaps with respect to different flexibility factors 1, 2 and 4.
chine sets with machine dependent processing times
(closedDi f f Times). Here, the objective gaps even
increased slightly (though the trend turns down again
with f lex = 4). The linked machines (linked∗) and
closed machine sets (closed∗) settings were even
harder than cases with random operation to ma-
chine set assignments. Parallel machine settings
(parallel∗) are the by far easiest cases and it can be
stated that introducing new parallel machines makes it
easier to find/prove (near-) optimal solutions. For all
different flexibility types the use of machine depen-
dent processing times (∗Di f f Times) makes the prob-
lem significantly harder for the CP Optimizer solver
to find better solutions (or prove their optimality).
5 CONCLUSION
Referring to the three aspects identified in the intro-
duction of this paper that might have the potential to
ease the FJSSP from a practical point of view, the re-
sults of the experimental evaluation supports the as-
sumptions that:
1. Machine independent processing times, i.e. oper-
ations possess the same processing time for each
machine on which they could be processed, eases
the challenge of finding/proving (near-) optimal
solutions.
2. The architecture of a (flexible job) shop, i.e. which
type of flexibility is allowed/possible in a shop,
highly impacts on problem solvability. In particu-
lar, the case where flexibility is based on parallel
machines each of which only supporting the same
single operation type, though still NP-hard from
a theoretical point of view, was identified to be a
quite easy type of FJSSP.
3. Increased flexibility factors do not decrease the
(proven) solution quality. In contrary, in our eval-
uations the objective gap, i.e. the proven worst-
case difference between the found solution and an
optimal solution, decreased by increasing the al-
lowed flexibility.
From a practical point of view the results of this
paper has several implications:
• The parallel machine FJSSP variant, that was
identified to be the easiest one, is often found also
in nowadays modern production environments.
For such application areas exact methods, in par-
ticular constraint programming (CP), should at
least be tried also in the light of large instances, as
it could be a strong alternative to heuristic meth-
ods.
• If operation processing times are machine depen-
dent but do not differ largely, it could be a good
idea to make these processing times machine in-
dependent (e.g. by using the average or the maxi-
mum) and correct the processing times in the near-
optimal solution afterwards, since machine inde-
pendent processing times lead to an easier prob-
lem variant from a practical CP point of view.
• The findings of this paper can be taken into ac-
count in order to or produce benchmark problem
instances of differing hardness.
• The often heard/read assessment that the FJSSP
is harder than the ’normal’ JSSP is not generally
true, especially when targeting at near-optimal so-
lutions.
Future work might concentrate on the following
issues:
• The results account for constraint programming
(CP). It can be assumed that the findings also
apply for other constraint based methods like
(mixed) integer programming or SAT-solving.
However, it is not clear whether heuristic methods
(e.g. evolutionary and genetic algorithms (Tep-
pan and Col, 2020; Teppan, 2018b; Teppan E.C.,
Types of Flexible Job Shop Scheduling: A Constraint Programming Experiment
521
Table 1: Measured objective gaps.
# flex=1 flex=2 flex=4 # flex=1 flex=2 flex=4
randomDiffTimes 1 0.29 0.24 0.21 random 1 0.30 0.14 0.04
randomDiffTimes 2 0.29 0.27 0.26 random 2 0.29 0.19 0.10
randomDiffTimes 3 0.29 0.26 0.26 random 3 0.31 0.16 0.07
randomDiffTimes 4 0.29 0.22 0.26 random 4 0.29 0.13 0.05
randomDiffTimes 5 0.32 0.25 0.26 random 5 0.31 0.17 0.08
randomDiffTimes 6 0.32 0.25 0.26 random 6 0.34 0.17 0.07
randomDiffTimes 7 0.27 0.26 0.26 random 7 0.29 0.17 0.08
randomDiffTimes 8 0.29 0.24 0.23 random 8 0.30 0.14 0.06
randomDiffTimes 9 0.32 0.24 0.25 random 9 0.32 0.15 0.06
randomDiffTimes 10 0.28 0.23 0.26 random 10 0.28 0.15 0.06
avg 0.30 0.25 0.25 avg 0.30 0.16 0.07
linkedDiffTimes 1 0.29 0.28 0.27 linked 1 0.30 0.18 0.09
linkedDiffTimes 2 0.29 0.28 0.28 linked 2 0.30 0.22 0.11
linkedDiffTimes 3 0.29 0.28 0.27 linked 3 0.31 0.20 0.08
linkedDiffTimes 4 0.29 0.27 0.27 linked 4 0.29 0.17 0.07
linkedDiffTimes 5 0.31 0.30 0.28 linked 5 0.30 0.21 0.10
linkedDiffTimes 6 0.32 0.31 0.26 linked 6 0.34 0.21 0.09
linkedDiffTimes 7 0.27 0.27 0.26 linked 7 0.29 0.20 0.10
linkedDiffTimes 8 0.30 0.26 0.25 linked 8 0.30 0.17 0.07
linkedDiffTimes 9 0.32 0.26 0.27 linked 9 0.31 0.19 0.07
linkedDiffTimes 10 0.28 0.27 0.26 linked 10 0.28 0.19 0.08
avg 0.30 0.28 0.27 avg 0.30 0.19 0.09
parallelDiffTimes 1 0.29 0.13 0.00 parallel 1 0.30 0.03 0.00
parallelDiffTimes 2 0.29 0.11 0.00 parallel 2 0.29 0.06 0.00
parallelDiffTimes 3 0.29 0.12 0.04 parallel 3 0.31 0.04 0.00
parallelDiffTimes 4 0.29 0.10 0.00 parallel 4 0.29 0.02 0.00
parallelDiffTimes 5 0.32 0.14 0.00 parallel 5 0.30 0.06 0.00
parallelDiffTimes 6 0.32 0.16 0.00 parallel 6 0.34 0.06 0.00
parallelDiffTimes 7 0.27 0.11 0.00 parallel 7 0.29 0.06 0.00
parallelDiffTimes 8 0.30 0.10 0.00 parallel 8 0.30 0.03 0.00
parallelDiffTimes 9 0.31 0.10 0.00 parallel 9 0.32 0.04 0.00
parallelDiffTimes 10 0.28 0.13 0.00 parallel 10 0.28 0.03 0.00
avg 0.30 0.12 0.00 avg 0.30 0.04 0.00
closedDiffTimes 1 0.29 0.33 0.30 closed 1 0.30 0.23 0.13
closedDiffTimes 2 0.29 0.32 0.33 closed 2 0.29 0.27 0.17
closedDiffTimes 3 0.29 0.32 0.31 closed 3 0.31 0.24 0.14
closedDiffTimes 4 0.29 0.31 0.30 closed 4 0.29 0.22 0.11
closedDiffTimes 5 0.32 0.34 0.32 closed 5 0.30 0.25 0.16
closedDiffTimes 6 0.31 0.35 0.30 closed 6 0.34 0.25 0.14
closedDiffTimes 7 0.27 0.30 0.31 closed 7 0.29 0.25 0.14
closedDiffTimes 8 0.29 0.31 0.30 closed 8 0.30 0.23 0.12
closedDiffTimes 9 0.32 0.30 0.32 closed 9 0.32 0.23 0.13
closedDiffTimes 10 0.28 0.31 0.30 closed 10 0.28 0.24 0.13
avg 0.30 0.32 0.31 avg 0.30 0.24 0.14
2018), dispatching rules(Teppan, 2018a)) could
benefit form this paper’s findings.
• More data sets including even larger problem in-
stances could bring further insights. In particular,
the question about whether there can be found a
phase transition, e.g. e.g. with respect to flexibil-
ity factors, is imposed.
• Analysis of the makespan values should reveal
whether the decreased objective gaps measured
for settings with machine independent processing
times and with larger flexibility factors are mainly
due to smaller makespans or better proven lower
bounds.
REFERENCES
Applegate, D. and Cook, W. (1991). A computational study
of the job-shop scheduling problem. ORSA Journal
on Computing, 3(2):149–156.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
522

Blazewicz, J., Ecker, K. H., Pesch, E., Schmidt, G., and
Weglarz, J. (2014). Handbook on Scheduling: From
Theory to Applications. Springer Publishing Com-
pany, Incorporated.
Bowman, E. H. (1959). The schedule-sequencing problem.
Operations Research, 7(5):621–624.
Brucker, P. and Jurisch, B. (1993). A new lower bound for
the job-shop scheduling problem. European Journal
of Operational Research, 64(2):156–167.
Brucker, P. and Schlie, R. (1990). Job-shop scheduling with
multi-purpose machines. Computing, 45(4):369–375.
Chaudhry, I. A. and Khan, A. (2015). A research survey:
Review of flexible job shop scheduling techniques. In-
ternational Transactions in Operational Research.
Da Col, G. and Teppan, E. (2019a). Google vs IBM: A
constraint solving challenge on the job-shop schedul-
ing problem. In Bogaerts, B., Erdem, E., Fodor, P.,
Formisano, A., Ianni, G., Inclezan, D., Vidal, G., Vil-
lanueva, A., Vos, M. D., and Yang, F., editors, Proc.
35th Int. Conf. on Logic Programming (ICLP’19),
Technical Communications, volume 306 of EPTCS,
pages 259–265.
Da Col, G. and Teppan, E. (2019b). Industrial size job
shop scheduling tackled by present day cp solvers. In
Schiex, T. and de Givry, S., editors, Principles and
Practice of Constraint Programming, pages 144–160,
Cham. Springer International Publishing.
Da Col, G. and Teppan, E. (2021). Large-scale benchmarks
for the job shop scheduling problem.
Fox, M. S., Allen, B. P., and Strohm, G. (1982). Job-shop
scheduling: An investigation in constraint-directed
reasoning. In Proc. of the AAAI, pages 155–158.
Fox, M. S., Sadeh, N., and Baykan, C. (1989). Con-
strained heuristic search. In Proc. of the Eleventh In-
ternational Joint Conference on Artificial Intelligence,
pages 309–315.
Garey, M. R., Johnson, D. S., and Sethi, R. (1976).
The complexity of flowshop and jobshop scheduling.
Mathematics of operations research, 1(2):117–129.
Johnson, S. (1953). Optimal Two- and Three-stage Pro-
duction Schedules with Setup Times Included. Rand
Corporation.
Keng, N. and Yun, D. Y. (1989). A planning/scheduling
methodology for the constrained resource problem. In
IJCAI, pages 998–1003.
Laborie, P. and Godard, D. (2007). Self-adapting large
neighborhood search: Application to single-mode
scheduling problems. In Proc. of MISTA-07, pages
276–284.
Laborie, P. and Rogerie, J. (2016). Temporal linear relax-
ation in ibm ilog cp optimizer. Journal of Scheduling,
19(4):391–400.
Laborie, P., Rogerie, J., Shaw, P., and Vil
´
ım, P. (2018).
Ibm ilog cp optimizer for scheduling. Constraints,
23(2):210–250.
Lasi, H., Fettke, P., Kemper, H.-G., Feld, T., and Hoffmann,
M. (2014). Industry 4.0. Business & information sys-
tems engineering, 6(4):239–242.
Manne, A. S. (1960). On the job-shop scheduling problem.
Operations Research, 8(2):219–223.
Muth, J. and Thompson, G. (1963). Industrial Scheduling.
International series in management. Prentice-Hall.
Rodler, P., Teppan, E., and Jannach, D. (2021). Random-
ized problem-relaxation solving for over-constrained
schedules. In Bienvenu, M., Lakemeyer, G., and Er-
dem, E., editors, Proc. of the 18th Int. Conf. on Prin-
ciples of Knowledge Representation and Reasoning
(KR’21), pages 696–701.
Sadeh, N. M. and Fox, M. S. (1996). Variable and value
ordering heuristics for the job shop scheduling con-
straint satisfaction problem. Artificial Intelligence,
86:1–41.
Sycara, K., Roth, S. F., Sadeh, N., and Fox, M. S.
(1991). Distributed constrained heuristic search.
IEEE Transactions on systems, man, and cybernetics,
21(6):1446–1461.
Taillard, E. (1993). Benchmarks for basic scheduling prob-
lems. European Journal of Operational Research,
64(2):278–285.
Teppan, E. and Col, G. (2020). Genetic Algorithms for Cre-
ating Large Job Shop Dispatching Rules, pages 121–
140.
Teppan, E. C. (2018a). Dispatching rules revisited-a
large scale job shop scheduling experiment. In 2018
IEEE Symposium Series on Computational Intelli-
gence (SSCI), pages 561–568.
Teppan, E. C. (2018b). Light weight generation of dis-
patching rules for large-scale job shop scheduling. In
Proc. of the 21st Int’l Conf on Artificial Intelligence
(ICAI’19), pages 330–333.
Teppan E.C., F. G. (2018). Heuristic constraint answer set
programming for manufacturing problems. In Hatzi-
lygeroudis, I.and Palade, V., editor, Advances in Hy-
bridization of Intelligent Methods. Smart Innovation,
Systems and Technologies, volume 85.
Types of Flexible Job Shop Scheduling: A Constraint Programming Experiment
523
