
Statistical Model Checking for Probabilistic Temporal Epistemic Logics
Yenda Ramesh
a
and M. V. Panduranga Rao
b
Dept. of Computer Science and Engineering, Indian Institute of Technology Hyderabad, Sangareddy, Telangana, India
Keywords:
Probabilistic Epistemic Temporal Logics, Statistical Model Checking, Multi Agent Systems.
Abstract:
Interpreted Systems and epistemic temporal logics have been employed extensively to study the notion of
knowledge in Multi-Agent Systems. New model checking algorithms, as well as adaptations of existing algo-
rithms to this setting have been reported. For the most part, these algorithms have focused on exhaustive state
space exploration based approaches. While these approaches yield accurate results to model checking queries,
they are often expensive for realistic scenarios. So much so that, many of the applications studied in academic
literature deal with small state spaces. In order to scale to real life multi-agent systems with large state spaces,
an alternative to exhaustive exploration based techniques is needed. Statistical Model Checking was proposed
to alleviate this problem when model checking stochastic systems against temporal logic queries. In this paper,
we extend this technique to epistemic temporal logics. The first version of the approach, which we call the
vanilla approach, would be to simply generate Monte Carlo samples of the runs of the system and evaluate the
query on them. The advantage that SMC is expected to bring is greatly diminished due to the knowledge op-
erator in such systems of logic. For large systems, this would entail an exhaustive exploration of epistemically
accessible global states. Our major contribution is to introduce a sampling based approach for the knowledge
operator as well. We show that this results in significant performance gains at the expense of a marginal loss
in accuracy (1-2% in experimental results) for most epistemic operators. Specifically, we show evidence of a
dramatic improvement in time complexity for large Multi-Agent Systems. We substantiate the effectiveness
of the approach through case studies that involve a large number of agents.
1 INTRODUCTION
Multi-Agent Systems (MASs) have been used exten-
sively in the recent past to model Artificial Intelli-
gence, emergent behavior and cooperative and adver-
sarial systems. Several complex systems and deci-
sion support systems have been modeled and studied
as MAS. Such systems have been subjected to study
and analysis through techniques like formal methods
in Computer Science. Of particular interest is analysis
through model checking.
Traditionally, model checking has been used ex-
tensively to study reactive systems (Baier and Katoen,
2008). Model Checking involves algorithmically de-
ciding whether or not a system satisfies a desired
property. Naturally, both the system and the desired
property have to be described formally to be fed to the
algorithm. The system is usually described through
some variant of a Kripke Structure and the property,
as a formula in an appropriate temporal logic (Ben-
a
https://orcid.org/0000-0001-8232-8269
b
https://orcid.org/0000-0003-3761-8501
Ari et al., 1981; Pnueli, 1977; Vardi, 1996). For ex-
ample, modeling formalisms like Labeled Transition
Systems have successfully captured evolution dynam-
ics of reactive systems. However, they fall short of be-
ing able to model features of MAS that are pertinent
to artificial intelligence and decision making.
Fagin et al. (Fagin et al., 2003) proposed the use of
epistemic modal logic to capture the notion of knowl-
edge possessed by an agent. The knowledge opera-
tor that they defined for computationally grounded se-
mantics (“Agent i knows that φ”) can also be extended
to other epistemic modalities like group knowledge,
distributed knowledge and common knowledge. The
introduction of the Interpreted Systems formalism al-
lowed MAS to be modeled by Kripke-like structures
enhanced by the epistemic or the knowledge compo-
nent, giving a computationally grounded semantics to
these modalities. Thus, it became possible to model
both dynamics and knowledge possessed by agents
naturally. Coupled with various systems of Epistemic
Temporal Logic (ETL), this provided a potent tool
for analysis of MAS. In this work, we use a proba-
bilistic extension of Interpreted Systems. We mention
Ramesh, Y. and Rao, M.
Statistical Model Checking for Probabilistic Temporal Epistemic Logics.
DOI: 10.5220/0010847900003116
In Proceedings of the 14th International Conference on Agents and Artificial Intelligence (ICAART 2022) - Volume 1, pages 53-63
ISBN: 978-989-758-547-0; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
53

that other versions of modal logic with, for example,
deontic and doxastic modalities have also been pro-
posed, which we will not consider in this work (Kauf-
mann et al., 2008).
For stochastic reactive systems, an alternative ap-
proach to exact model checking algorithms (that in-
volve exhaustive state space exploration) was pro-
posed (Nimal, 2010; Agha and Palmskog, 2018;
Younes et al., 2010; Legay et al., 2010). This ap-
proach, called Statistical Model Checking (SMC) is
essentially based on a Monte-Carlo sampling of the
runs of the system. Intuitively, the fraction of runs
that evaluate the formula to TRUE decides the out-
come of the model checking query. This variant has
found particular traction in situations where a trade-
off between accuracy and time/space complexity is
acceptable (Younes et al., 2004). This approach has
been extended to different variants of Stochastic Multi
Agent Systems (SMASs) as well (Herd et al., 2015b;
Herd et al., 2015a).
In this work, we propose an SMC algorithm
to check Probabilistic Epistemic Temporal logic K-
PCTL(B) against a stochastic version of Interpreted
Systems. A straightforward adaptation of the SMC
approach to this problem would be to simulate several
runs of the system and evaluate the epistemic tempo-
ral logic formulas on them. Indeed, this does give a
first cut SMC algorithm. However, a bottleneck re-
mains for efficient evaluation of the knowledge oper-
ator at a time step.
In the worst case, a (Stochastic) Multi Agent Sys-
tem with n agents having k local states each, has a
state space of size k
n
. This results in a running time
that is exponential in the number of agents. For sys-
tems that have a large number of agents, such time
complexity is expensive–most of the case studies re-
ported in literature involve small sized models. As ex-
ample of a system whose analysis can be expensive,
consider the spread of a pandemic among n agents.
Suppose φ is a propositional formula that evaluates
to TRUE iff at least 60% agents are infected. A perti-
nent query that would involve both temporal and epis-
temic operators is “What is the probability that agent i
knows that φ before τ time steps?”. Another example,
which has been constructed by Wan et al (Wan et al.,
2013), is that of online supermarkets. This system
has two agents, a customer agent and a server agent.
A useful query in this context is “what is the probabil-
ity that when a customer places an order online, she
knows that at least 90% of the items will be shipped
successfully?”.
Given this, we propose a sampling approach to
evaluate the knowledge operator as well. This needs
some innovation in the way the sampling is done, in
accordance with the knowledge operator. We analyze
the impact of this sampling approach on the accuracy,
and the resulting speed-up. We show empirical ev-
idence for a substantial improvement over the brute
force SMC for queries of nesting level of one. We
remark that we do not report evaluation of our sam-
pling approach against numerical approaches, as it is
well known that they do not scale well for systems
with a large state space. While the advantage of the
sampling algorithm over the brute force SMC is to be
expected, what is surprising is the degree of accuracy
that is achieved for a running time that is several or-
ders of magnitude lesser.
The paper is structured as follows. We begin, in
the next section, with a brief introduction to some pre-
liminary ideas, terminology and notation that will be
used in the rest of the paper. In section 3, we discuss
the SMC algorithms for various epistemic operators,
both brute force (which we call the “Vanilla” SMC al-
gorithm) and the Epistemic Sampling (ES) algorithm.
In section 4, we report case studies that substantiate
the effectiveness of the ES algorithm. To put our work
in context with some of the existing state of the art, we
discuss related work in section 5. We conclude the
paper in section 6, with a brief discussion of future
directions.
2 PRELIMINARIES
In this section, we discuss some basic definitions and
concepts that will be useful subsequently.
A Multi Agent System consists of several agents,
each of which can be in one of several local states. It
is also customary to designate a special environment
agent that is distinct from all other agents. Formally,
let A = {1.. .,n} denote a set of n agents. Corre-
sponding to each agent i ∈ A is a set L
i
of local states,
and a set of actions Act
i
. We denote the state of agent i
at time t by l
i
(t) ∈ L
i
. Similarly, l
e
(t) for the environ-
ment. Evolution of the system is essentially change
of states of these agents. The state space of the entire
system can therefore be described set of global states
G ⊆ L
1
× L
2
× ... × L
n
. One can then talk of a global
state g(t) ∈ G at time t that is a tuple aggregated from
the local states: g(t) = (l
1
(t).. .l
n
(t)l
e
(t)).
Associated with each agent i is a protocol A
i
, and
with the environment, a protocol A
e
that changes its
local state at each time step, in accordance with the
corresponding the action:
l
i
(t)
A
i
: α ∈ Act
i
−−−−−−→ l
i
(t + 1)
for l
i
(t),l
i
(t + 1) ∈ L
i
. Similarly, for the environment
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
54

agent:
l
e
(t)
A
e
: α ∈ Act
e
−−−−−−−→ l
e
(t + 1)
Consequently, the global state evolves from g(t) =
(l
1
(t) ... l
n
(t)l
e
(t)) to g(t + 1) = (l
1
(t + 1). ..l
n
(t +
1)l
e
(t +1)). We can also define the initial global state:
g
0
= (l
in
1
,. ..l
in
n
), where l
in
i
are the local initial states.
We denote the local state of an agent i within a global
state g(t) by g(t)
i
.
We can also define a labeling function L : G →
2
AP
, where AP is a set of atomic propositions that hold
true on a global state. An Interpreted System then, is
the tuple h(L
i
,A
i
)
i∈A
,g
0
,AP,Li, where i runs over all
agents and g
0
is a starting global state.
The evolution protocol is specific to the applica-
tion. Since we are interested in stochastic multi-agent
systems in this paper, we now discuss evolution for
such systems.
2.1 Stochastic Multi Agent Systems
A simple example of stochastic evolution is the case
when the agents are modeled as a Discrete Time
Markov Chain (DTMC). The evolution protocol A
i
for
an agent i is then simply a stochastic matrix P
i
with el-
ements p
l
i
,l
0
i
:
l
i
(t)
p
l
i
,l
0
i
−−→ l
0
i
(t + 1),
where p
l
i
,l
0
i
is the probability of transition from the
state l
i
to l
0
i
and
∑
l
0
i
p
l
i
,l
0
i
= 1. In the simplest set-
ting, action symbols may be omitted. The Stochastic
Multi Agent System is then merely an aggregation of
DTMCs–one DTMC for each agent. For incorporat-
ing synchronization and interaction, they can be aug-
mented with action symbols (Delgado and Benevides,
2009). For the purposes of demonstrating the sam-
pling approach over epistemic operators, the former
formulation suffices. Indeed, this is what we employ
in this paper.
2.2 Epistemic Accessibility
For each agent i, we define the epistemic accessibil-
ity relation ∼
i
between the global states in G at time
snapshot t as follows: g(t) ∼
i
g
0
(t) if and only if
g(t)
i
= g
0
(t)
i
. In other words, two global states belong
to the same equivalence class with respect to ∼
i
if and
only if the local state of agent i is the same in both
the global states. Epistemically, these global states
are indistinguishable for agent i. Alternatively, these
global states are said to be epistemically accessible to
each other. Informally speaking, if a fact “holds” in
all such global states, the agent is said to know the
fact. We will formalize this notion later in subsection
2.4, while defining the semantics of epistemic formu-
las.
We are now in a position to define global
model for an SMAS, which is a tuple hG,g
0
,{P
i
,∼
i
}
i∈A
,AP,Li where
• G, the set of global states, g
0
an initial global state,
P
i
the stochastic transition matrices for each agent
i and ∼
i
, the epistemic accessibility relations are
as defined earlier.
• AP is a set of atomic propositions
• L : G → 2
AP
is a labeling function that assigns
atomic propositions to the states in G.
Such a structure can be subjected to analysis
against desired properties through model checking. In
this paper, we will use K-PCTL(B) as the temporal
epistemic logic for formulating queries. As a running
example, we model simple epidemic dynamics in this
formalism. At any given point in time, every individ-
ual (agent) in the population is in one of the follow-
ing health states (Kermack and McKendrick, 1927):
Susceptible (S), Infected (I) or Recovered (R). The
transition from S to I to R is modeled as a simple
three-state DTMC. We use one atomic proposition a
on the set of global states that evaluates to TRUE for
all and only those global states with at least 60% of
the agents in the I state. Then an example query of
interest is: “what is the probability that agent i knows
that at least 60% of the population is infected?”
2.3 Measurability
An important criterion for statistical model check-
ing, and indeed probabilistic model checking, is that
the set of runs or trajectories should form a measur-
able set (Agha and Palmskog, 2018). It turns out
that this is indeed the case for a large variety of
practical stochastic systems–ranging from DTMCs to
stochastic discrete event systems. In particular, in our
setting, the definitions of the measurable space–the
sample space, the sigma algebra and the probability
measure–that is valid for Probabilistic Computation
Tree Logic (PCTL) model checking for DTMCs re-
main unchanged (Baier and Katoen, 2008). As we
will see in the next section, the only change will be
in the statistical model checking algorithm’s ability
to estimate the probability accurately. Specifically,
the algorithm for assigning truth values to the (state)
knowledge operators will be a (one-sided error) ran-
domized algorithm, prone to false positives.
2.4 K-PCTL(B)
Probabilistic extensions to Epistemic Temporal Log-
ics have been explored extensively in the past. For
Statistical Model Checking for Probabilistic Temporal Epistemic Logics
55

example, Delgado and Benevides (Delgado and Bene-
vides, 2009) introduced the Probabilistic Epistemic
Temporal Logic (PETL), which was revisited by Fu et
al (Fu et al., 2018) as K-PCTL. K-PCTL is PCTL aug-
mented with epistemic modalities. Since PCTL(B),
(PCTL with bounded Until) is a fragment of K-
PCTL(B), we will review PCTL syntax and semantics
when discussing K-PCTL(B). For statistical model
checking, the most conducive approach is to replace
the Until fragment of K-PCTL with the bounded Un-
til fragment. This is because, as will be seen shortly,
traditional SMC algorithms work by sampling finite-
length runs of the system. We call this version the
Bounded Probabilistic Computation Tree Logic of
Knowledge (K-PCTL(B)).
Syntactically, K-PCTL(B) has the following
grammar
1
:
φ := TRUE | a | φ ∧ φ | ¬φ | K
i
φ | E
G
φ | D
G
φ | C
G
φ
| Pr
=?
ψ
ψ = Xφ | φU
≤τ
φ
where a ∈ AP is an atomic proposition.
We need the following terminology before dis-
cussing the semantics of the above grammar. A path
fragment σ = g
0
g
1
....g
T
is a sequence of global states
in the execution of the system M over T discrete time
units and where each state g
t
corresponding to state of
the system at t
th
time instant i.e. σ[t] = g
t
. The fact
that a state g (or a path σ) satisfies a K-PCTL(B) state
formula φ (or a path formula ψ) is denoted by g |= φ
(or σ |= ψ). Building upon the ∼
i
relation, we can de-
fine relations that involve multiple agents. These re-
lations are ∼
E
G
=
S
i∈G
∼
i
, ∼
D
G
=
T
i∈G
∼
i
and ∼
C
G
, the
transitive closure of ∼
i
, where G is a group of agents.
These relations in turn are useful in defining epis-
temic operators that involve a group of agents. Impor-
tant examples are the group, distributed and common
knowledge operators.
Semantics of the K-PCTL(B) is as follows. We
first list semantics for the state formulas, which are
common in probabilistic temporal logic, along with
the epistemic fragment.
1
We note that there exists another popular variant of the
probabilistic operator: Pr
θ
, where ∈ {<,≤,≥, >} is a
comparison operator and θ ∈ [0,1].
State formulas:
g |= TRUE
g |= a iff a is true in the state s
0
g |= Φ
1
∧ Φ
2
iff g |= Φ
1
and g |= Φ
2
g |= ¬Φ iff g 2 Φ
Epistemic formulas:
g |= K
i
φ iff ∀g
0
∈ G,
g ∼
i
g
0
=⇒ g
0
|= φ
g |= E
G
φ iff g ∼
E
G
g
0
=⇒ g
0
|= φ
g |= D
G
φ iff g ∼
D
G
g
0
=⇒ g
0
|= φ
g |= C
G
φ iff g ∼
C
G
g
0
=⇒ g
0
|= φ
The K
i
φ operator says that “agent i knows that φ
(is TRUE)” if and only if φ is TRUE in all epistemi-
cally accessible global states–namely the global states
that are epistemically indistinguishable for agent i.
The group knowledge operator E
G
evaluates to
TRUE if and only if every agent in the group G knows
that φ.
The distributed knowledge operator D
G
evaluates
to TRUE if and only if the agents in the group G to-
gether know that φ. In other words, while individual
agents may not know that φ is TRUE, it can be in-
ferred from the knowledge possessed by the individ-
ual agents.
Finally, the common knowledge operator C
G
φ
evaluates to TRUE if all the agents in the group G
know that φ, they all know that they know φ, ad in-
finitum. We use a syntactic characterization on the
model for designing the algorithm.
Now, we discuss the semantics of the path formu-
las, noting that σ[t] denotes the t
th
state in the path:
Path formulas:
σ |= X φ iff σ[1] |= φ
σ |= φ
1
U
≤τ
φ
2
iff ∃j ≤ τ | σ[ j] |= φ
2
,
and ∀t < j | σ[t] |= φ
1
Finally, P
=?
ψ estimates the probability measure of the
paths σ that start in g, and satisfy ψ.
We remark that PCTL(B) is K-PCTL(B) without
the epistemic fragment, namely, K
i
,E
G
,D
G
and C
G
.
PCTL is PCTL(B) augmented with the unbounded
until operator U with the semantics:
σ |= φ
1
Uφ
2
iff ∃j | σ[ j] |= φ
2
,and ∀t < j | σ[t] |= φ
1
.
2.5 Statistical Model Checking
Statistical Model Checking (SMC) works by Monte
Carlo sampling. Runs of the system are generated
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
56

through simulation and the temporal logic formula is
evaluated. SMC comes in two flavors. The first one,
generally referred to as qualitative SMC, involves
techniques like hypothesis testing to decide whether
a formula is TRUE or not. The second one, called
the estimation technique, tries to estimate the prob-
ability of a formula being true. In any case, the ap-
proach works by generating several runs (say, N) of
the system and evaluating the query on each run. In
the estimation problem, a Bernoulli random variable
b
r
is set to 1 iff the formula evaluates to TRUE the r
th
run. An estimate of the probability that the formula
is true is
∑
b
r
N
. Clearly, as the number of runs grows,
the accuracy of the estimate improves. Tail inequali-
ties like the Chernoff-Hoeffding bounds can be used
to estimate the minimum number of runs needed for a
desired accuracy and confidence.
3 SMC ALGORITHMS FOR
EPISTEMIC OPERATORS
K-PCTL(B)
In this section, we discuss our main algorithms. Start-
ing with the basic knowledge operator in combination
with temporal operators, we move on to group, dis-
tributed and common knowledge operators.
3.1 SMC for K
i
φ (with Temporal
Operators)
We first discuss the model checking subroutine for
the epistemic operator K
i
φ. We have to decide if
a global state g satisfies K
i
φ. An exhaustive algo-
rithm would work by looking at all the global states
that are epistemically accessible from g via the re-
lation ∼
i
((Delgado and Benevides, 2009)). The
global state g |= K
i
φ, if and only if φ is TRUE at
all such states. Once the truth value of K
i
φ is as-
certained, it is straightforward to evaluate larger for-
mula like Pr
?
[K
i
φ
1
U
≤τ
K
j
φ
2
] through standard algo-
rithms (Baier and Katoen, 2008).
The computational bottleneck in this approach lies
in the following scenario. If there are n agents each
having k
i
local states, the number of epistemically ac-
cessible states can potentially be Π
i
k
i
. For example, if
all agents have the same number k of local states, the
global state space is of size k
n
. Exploring the entire
state space in the worst case is computationally very
expensive.
However, this gives a first-cut SMC algorithm.
The algorithm proceeds by generating sample runs of
the system, as in the case of the SMC algorithm for
probabilistic temporal logics. For evaluation of the
epistemic operators, the algorithm resorts to exhaus-
tively visiting all epistemically accessible valid states.
We will call this the “Vanilla” SMC algorithm.
Can we extend the sampling procedure for evalu-
ating the truth value of epistemic operators as well?
The approach that we propose is to sample a “small”
number M of epistemically accessible states and
check if φ is TRUE or not, for only these states. We
call this the “Epistemic Sampling” (ES) Statistical
Model Checking approach. The approach for K
i
φ is
outlined in Algorithm 1. Let the global state of the
system at time t be g(t). The procedure K
op
for eval-
uating the knowledge operator takes in as input the
current global state g(t), the agent i for whom the
knowledge operator is to be evaluated, a user decided
sample size M, along with the SMAS. In the cur-
rent global state, suppose agent i has the local state
l
i
. Then in line 3, the algorithm calls a sampling rou-
tine to construct a sample S of the global states that
are epistemically accessible to g. The sampling rou-
tine is detailed in Algorithm 2. The procedure returns
TRUE if and only if all states in S satisfy φ. The sam-
pling routine works as follows. A global state is gen-
erated uniformly at random. One way of doing this
is as follows. For each agent, generate its local state
(uniformly) at random. Other flavors could do this
without replacement. Line 6 is crucial, and depends
on the application at hand. A global state generated in
this way may be “illegal” due to two reasons: (a) the
state is semantically not possible in the system and
(b) it is epistemically inaccessible from g. Otherwise,
such a state would be called legal. This decision is
made by the isLegal function in line 6. A total of M
legal states generated this way are populated into the
set S and is returned. If isLegal is efficiently com-
putable (say in O(n
c
), for some constant c), then the
routine takes O(Mn
c
) steps. This is a significant sav-
ing in comparison to the k
n
steps needed to explore
the state space exhaustively.
Algorithm 1.
1: procedure K
op
(g, i, Φ, M, SMAS)
2: Let the current (local) state of agent i be l
i
.
3: S ← A M-sized set of epistemically accessible
global states
4: if φ is TRUE in all states in S then
5: Return “yes”
6: else
7: Return “No”
However, this sampling has consequences on ac-
curacy. The following lemma is easy to see.
Lemma 1. If φ is TRUE on all epistemically accessi-
ble states, then Algorithm 1 returns TRUE. In other
words, the probability of false negatives is zero.
Statistical Model Checking for Probabilistic Temporal Epistemic Logics
57

Algorithm 2.
1: procedure SMC(M, SMAS)
2: Count ← 0, S ← Φ
3: while Count ≤ M do
4: Sample a global state uniformly at random
5: //For all agents j 6= i, generate a local state
g
6: if isLegal(g) then
7: S ← S
S
g
8: Count ← Count + 1
9: if no new global states to sample then
10: break
11: Return S
On the other hand, the formula φ may not be
TRUE on all the epistemically accessible global
states. Then, the algorithm could report a false posi-
tive if the sampling routine does not generate at least
one global state where φ is not TRUE. This leads to
the following lemma.
Lemma 2. If φ is FALSE on a fraction f > 0 of all
epistemically accessible global states, then the Algo-
rithm 1 will output FALSE with probability at least
1 − (1 − f )
M
.
Proof. Suppose g 6|= K
i
φ. Let the fraction of epis-
temically accessible global states that do not satisfy
φ be at least f . Then, in M samples, the probabil-
ity that a satisfying global state is always picked is at
most (1 − f )
M
. This is the probability of false pos-
itive at any given time step. Therefore, the proba-
bility that the false positive does not occur is at least
1 − (1 − f )
M
.
Therefore, the larger the fraction of global states
where φ is FALSE, the higher the chance that such
a state will be picked, and therefore, the lower the
chance of a false positive.
Hence, for example,
Corollary 1. For the formula Pr
=?
(T U
≤τ
K
i
φ),
the probability that a false positive does not occur is
at least (1 − (1 − f )
M
)
τ
.
We can also bound the false positive probabil-
ity for the bounded until fragment when both the
operands are epistemic operators.
Corollary 2. Let K
i
φ and K
j
φ be FALSE at every
step. Let the probability of false positive evalua-
tion by the ES algorithm at any point in time be,
for K
i
φ be p
1
and that for K
j
φ be p
2
. Then, for
the formula Pr
=?
[K
j
φ
1
U
≤τ
K
i
φ
2
], Pr[False positive] ≤
(1 − p
1
)
M
(1 − p
2
)
M
.
Proof. Suppose a run is (falsely) declared TRUE for
the formula, at time t. This will happen if K
i
φ
1
is (falsely) evaluated to TRUE for t − 1 steps, af-
ter which K
j
φ
2
is (falsely) evaluated to TRUE. For
the corresponding false positive probabilities, the
probability of false positive is (1 − p
1
)
M(t−1)
(1 −
p
2
)
M
. This is bounded from above by (1 − p
1
)
M
(1 −
p
2
)
M
.
We remark that Pr
=?
[K
j
φ
1
U
≤τ
K
i
φ
2
] can evaluate
to FALSE in other ways as well. For example, the
K
i
φ can be TRUE at all steps before τ, but K
j
φ never
evaluates to TRUE for all t ≤ τ. Analogous analysis
can be performed for these cases individually, which
we omit in the interest of space.
As a consequence of the above discussion, it is
easy to see that a given run of the system has the
following properties. A run that evaluates to TRUE
in the Vanilla SMC algorithm will also be evaluated
to TRUE by the ES algorithm. However, some runs
in the Vanilla SMC that evaluate to FALSE might
be evaluated to TRUE by the ES algorithm. Hence,
some of the Bernoulli random variables would take
the value 1, when in fact they should be 0.
Recall that the probability of false positives can be
controlled by the number M of epistemically acces-
sible states sampled. The presence of false positives
shifts the average of the distribution. It is easy to show
that if the false positive rate is small, so is the error in
probability estimation.
Theorem 3. Let the probability of false positive eval-
uation of the formula in the ES algorithm be p
f p
≈
1
δN
for δ > 0. Then, the probability that the estimate given
by the ES algorithm deviates from the actual mean p
is the same as that for the Vanilla algorithm.
Proof. Consider the vanilla algorithm that has N runs.
Let the outcomes of the N runs be defined by inde-
pendent Bernoulli random variable X
i
, 1 ≤ N, and
∑
N
i=1
X
i
= X. Let p be the actual probability of the
formula being satisfied. Then, a simple application of
the Chernoff bound shows that
Pr(X ≥ (1 + δ)N p) ≤
e
δ
(1 + δ)
(1+δ)
N p
,
for any δ > 0.
Consider now the Epistemic Sampling algorithm.
As we say previously, in this algorithm, some runs
may yield false positives. Let the number of runs now
be N
0
. Let the sum of the N
0
Bernoulli random vari-
ables be X
0
. The mean shifts to p + p
f p
where p
f p
is
the term due to false positives. We now bound from
above the probability that this random variable X
0
is
larger than the (1 + δ)N p. Then, an easy derivation
from first principles follows. Recall the folklore Cher-
noff bound:
Pr(X
0
≥ c) ≤
E[e
rX
0
]
e
cr
(1)
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
58

Using c = (1 + δ)N p and r = ln(1 + δ) for δ > 0,
we get
Pr(X
0
≥ (1 + δ)N p) ≤
e
N
0
pδ
(1 + δ)
(1+δ)N p
e
N
0
p
f p
δ
(2)
If the same number of runs N is used, the bound
becomes:
Pr(X
0
≥ (1 + δ)N p) ≤
e
δ
(1 + δ)
(1+δ)
N p
e
N p
f p
δ
(3)
Thus, for a sufficiently small false positive rate, the
bound does not loosen much.
3.2 Group, Distributed and Common
Knowledge
The sampling algorithms for the group and the dis-
tributed knowledge operators are straightforward. We
first discuss them. The group operator E
G
is evaluated
as follows. It is easy to see that g |= E
G
(φ) evaluates
to TRUE if and only if g |= K
i
φ for all agents i ∈ G.
This suggests an easy extension to the Epistemic Sam-
pling algorithm: For all the agents in the group G,
evaluate K
i
φ through sampling. Return TRUE if and
only if it is TRUE for all such evaluations.
For the distributed knowledge operator, the fol-
lowing sampling based algorithm, listed in Algo-
rithm 3 is easy to conceive. In a sample of epistemi-
cally accessible states for the agents in G, check if the
formulas imply K
i
φ. Return TRUE if and only if it is
TRUE for all such evaluations.
Algorithm 3: Algorithm for evaluating Distributed knowl-
edge Operator.
1: procedure DISTRIBUTED KNOWL-
EDGE(gState,G,φ)
2: M ← number of agents in group G
3: for i ← 1 to M do
4: S
i
← a sample of epistemically related
states of gState w.r.t. agent i
5: S ← S
1
∩ S
2
∩ ... ∩ S
M
6: Check whether the formulas satisfied in S im-
ply φ
7: if all the states in S satisfies φ then
8: return T RUE
9: else
10: return FALSE
Semantically, the common knowledge operator
is the reflexive and transitive closure of the group
knowledge operator. This leads to a simple algorithm.
The common knowledge operator can be evaluated
through a recursive (depth-first) search of the epis-
temically accessible global states in G. This is done
by generating a target number of samples of epistem-
ically accessible states. For each state, if the state
does not satisfy φ, the algorithm returns FALSE. Oth-
erwise, the sampling continues recursively from that
state. The algorithm is detailed in Algorithm 4.
In the next section, we provide empirical evidence
that this approach yields comparable accuracy in sig-
nificantly lesser running time.
Algorithm 4: Evaluating Common Knowledge Operator By
Finding Transitive Closure.
1: procedure COMMON KNOWL-
EDGE(gState,A
i
,φ, List, currIndex)
2: List.add(gState) Initially List is empty
3: i ← 0
4: while i < sampleSize do
5: newState ← Generate random epistemi-
cally accessible state from agent A
i
6: if List does not contain newState then
7: List.add(newState)
8: i ← i + 1
9: while currIndex < listSize do Initally
currIndex is zero
10: currState ← List.get(currIndex)
11: currIndex ← currIndex + 1
12: if φ is not satisfied in currState then
13: return FALSE
14: else
15: nextState ← List.get(currIndex)
16: CommonKnowledge(nextState,A
i
,φ,
17: List,currIndex)
18: return T RUE
4 CASE STUDIES
We discuss two case studies. All experiments for
the two studies were conducted on the system with
Ubuntu 18.04.2 LTS (64-bit) operating system, In-
tel(R)Xeon(R) CPU E5-2690 v4 @ 2.60GHz Proces-
sor, 62 GiB RAM, and a 2TB hard disk. One way
of estimating the number of runs needed, that is com-
monly used for SMC, is to appeal to the Chernoff Ho-
effding bound. For the estimated probability p
0
to be
within ε of p with a high probability 1 − δ, one needs
at least ln
2/δ
2ε
2
samples. Therefore, we evaluate the
queries over 2335 runs which corresponds to ε = 0.03
and δ = 0.03.
4.1 Epidemic Spreading
Consider a disease which is spreading across a pop-
ulation of n agents. An agent progresses from being
susceptible to being infected. To focus the exposi-
tion on the model checking aspect, we use a simple
Statistical Model Checking for Probabilistic Temporal Epistemic Logics
59
Table 1: Results of Query 1. Number of runs: 2335. The query evaluation time is measured in seconds.
n Sample Size
(M = n log n)
Prob Est (ES) Prob Est
(Vanilla)
Time (ES) Time
(Vanilla)
10 23 0.788 0.760 0.043 0.4
15 40 0.784 0.781 0.079 5.12
20 60 0.751 0.765 0.111 119
25 80 0.773 0.776 0.151 2734
30 102 0.792 0.778 0.190 56942
Table 2: Results of Query 2. Number of runs: 2335. The query evaluation time is measured in seconds.
n Sample
Size (M =
nlog n)
Prob Est (ES) Prob Est (Vanilla) Time (ES) Time
(Vanilla)
10 23 0.60 0.60 0.506 3.338
15 40 0.58 0.52 0.818 128
20 60 0.56 0.48 1.281 4693
25 80 0.52 0.42 1.905 169448
30 102 0.50 0.40 3.519 ≥ 500 hrs
epidemic “spread” dynamic–a susceptible agent gets
infected with probability 0.1 at each time step and an
infected agent recovers at each time step with proba-
bility 0.1. Initially, all the agents are susceptible.
2
The first query asks “what is the probability that
agent i knows that 60% people are infected within 10
time steps”:
Pr
=?
(TRUE U
τ≤10
K
i
(Atleast
60 % Agents Are Infected))
For all the queries, the number of global states
sampled, M in the algorithm listing, is n log n, where
n is the number of agents. We remark that nlog n is
a modest sample size, which may be increased for
greater accuracy. We evaluate this query for different
values of n in {10,15,20,25, 30}. We compare per-
formance of the Vanilla SMC with the proposed Epis-
temic Sampling approach. The results are detailed in
Table 1. The sample size, that is, the number of epis-
temically accessible global states is nlog n (column
2). It can be seen from columns 3 and 4 that the esti-
mates are close. What is striking is the difference be-
tween the times taken (columns 5 and 6). The Vanilla
SMC that visits every epistemically accessible global
state takes significantly higher time.
The second, somewhat artificial query, asks “what
is the probability that agent i knows that num-
ber of recovered people are at most 60% Un-
til agent j knows that number of infected peo-
ple are at least 80%, within 15 time steps”:
Pr
=?
(K
i
(φ
1
) U
≤15
K
j
(φ
2
)), where φ
1
stands for
2
In general, the spread of an epidemic is modeled elab-
orately using, for example, differential equations (Kermack
and McKendrick, 1927).
“atmost 60% agents are recovered” and φ
2
stands for
“at least 80% agents are infected.
We evaluate this query for n in {10, 15,20, 25,30}.
Table 2 shows the results for the query. Notice that the
mismatch increases for a more complex query. This
is to be expected, since we keep the number of runs
same, in spite of higher chances of false positives.
Nevertheless, the difference between times taken con-
tinues to be significant.
4.2 Group, Distributed and Common
Knowledge
We now discuss results for the epidemic case study
in the context of the group, distributed and com-
mon knowledge operators. We report results of
the cases when the numbers of agents are n in
{10,15, 20,25,30}. Further, we randomly select four
agents to form the group G.
4.2.1 Group Knowledge (E
G
)
In the epidemic setting, we use the group knowl-
edge operator to ask the query “what is the prob-
ability that every agent in group G, knows that
60% people are infected with in 10 time steps”:
Pr
=?
(T RUE U
≤10
E
G
(φ
1
)), where φ evaluates to
TRUE iff at least 60% agents are infected.
Table 3 shows the results. We observe that the
probability estimates are close; however the ES ap-
proach yields a significant gain in terms of running
time over the Vanilla SMC.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
60
Table 3: Results for Pr
=?
(T RUE U
≤10
E
G
(φ
1
)). Number of runs: 2335. The query evaluation time is measured in
seconds.
n Sample
Size (M =
nlog n)
Prob Est (ES) Prob Est (Vanilla) Time (ES) Time
(Vanilla)
10 23 0.769 0.752 0.048 3.78
15 40 0.764 0.745 0.072 83
20 60 0.767 0.751 0.108 1461
25 80 0.765 0.745 0.141 11211
30 102 0.774 0.755 0.619 256850
Table 4: Results for Pr
=?
(T RUE U
≤10
D
G
(φ
1
)). Number of runs: 2335. The query evaluation time is measured in
seconds.
n Sample Size
(M = n log n)
Prob Est (ES) Prob Est
(Vanilla)
Time (ES) Time
(Vanilla)
10 23 0.739 0.734 0.049 0.178
15 40 0.756 0.748 0.075 3.814
20 60 0.773 0.768 0.098 105
25 80 0.795 0.782 0.145 2526
30 102 0.802 0.791 0.206 58588
Table 5: Results for Pr
=?
(T RUE U
≤10
C
G
(φ
1
)). Number of runs: 2335. The query evaluation time is measured in
seconds.
n Sample Size
(M = n log n)
Prob Est (ES) Prob Est
(Vanilla)
Time (ES) Time
(Vanilla)
10 23 0.768 0.760 0.306 4.886
15 40 0.789 0.773 0.588 180
20 60 0.799 0.772 1.084 3256
25 80 0.795 0.780 1.728 31234
30 102 0.801 0.785 2.860 >150 hrs
4.2.2 Distributed Knowledge (D
G
)
As an example of the distributed knowledge opera-
tor, we ask “what is the probability that combined
knowledge among agents in group G, implies that
60% people are infected with in 10 time steps”:
Pr
=?
(T RUE U
≤10
D
G
(φ
1
)), where φ is TRUE iff
at least 60% agents are infected. Table 4 shows the
results of the query.
4.2.3 Common Knowledge (C
G
)
Finally, as an example of the common knowledge
operator, we discuss the query “what is the proba-
bility that it is common knowledge among the G,
is 60% people are infected, within 10 time steps”:
Pr
=?
(T RUE U
≤10
C
G
(φ
1
)), where φ
1
evaluates
to TRUE iff at least 60 % agents are infected. Ta-
ble 5 shows the results. When needing to perform
the closure, it can be seen that the ES algorithm fares
much better than the Vanilla algorithm in terms of
running time. There is, as expected, some loss in ac-
curacy. Unsurprisingly, the running time for the com-
mon knowledge is greater than that of group and dis-
tributed knowledge queries. The number of states to
be explored is the least for the distributed knowledge
operator, since it involves intersection. On the other
hand, sampling closure takes the most time. Inter-
mediate is the group knowledge operator, since it in-
volves taking union of epistemically accessible states
for various agents in the group G.
4.3 Online Shopping
The second case study that we report was used by
Wan et al (Wan et al., 2013) while discussing their
adaptation of the PCTL algorithm for the epistemic
operators. The setting is as follows. There is an on-
line shopping system, with three agents: a customer,
a server and the environment. When the customer re-
quests a delivery, the system will deliver the goods
successfully 95% of the time, and fail 5% of the time.
Statistical Model Checking for Probabilistic Temporal Epistemic Logics
61
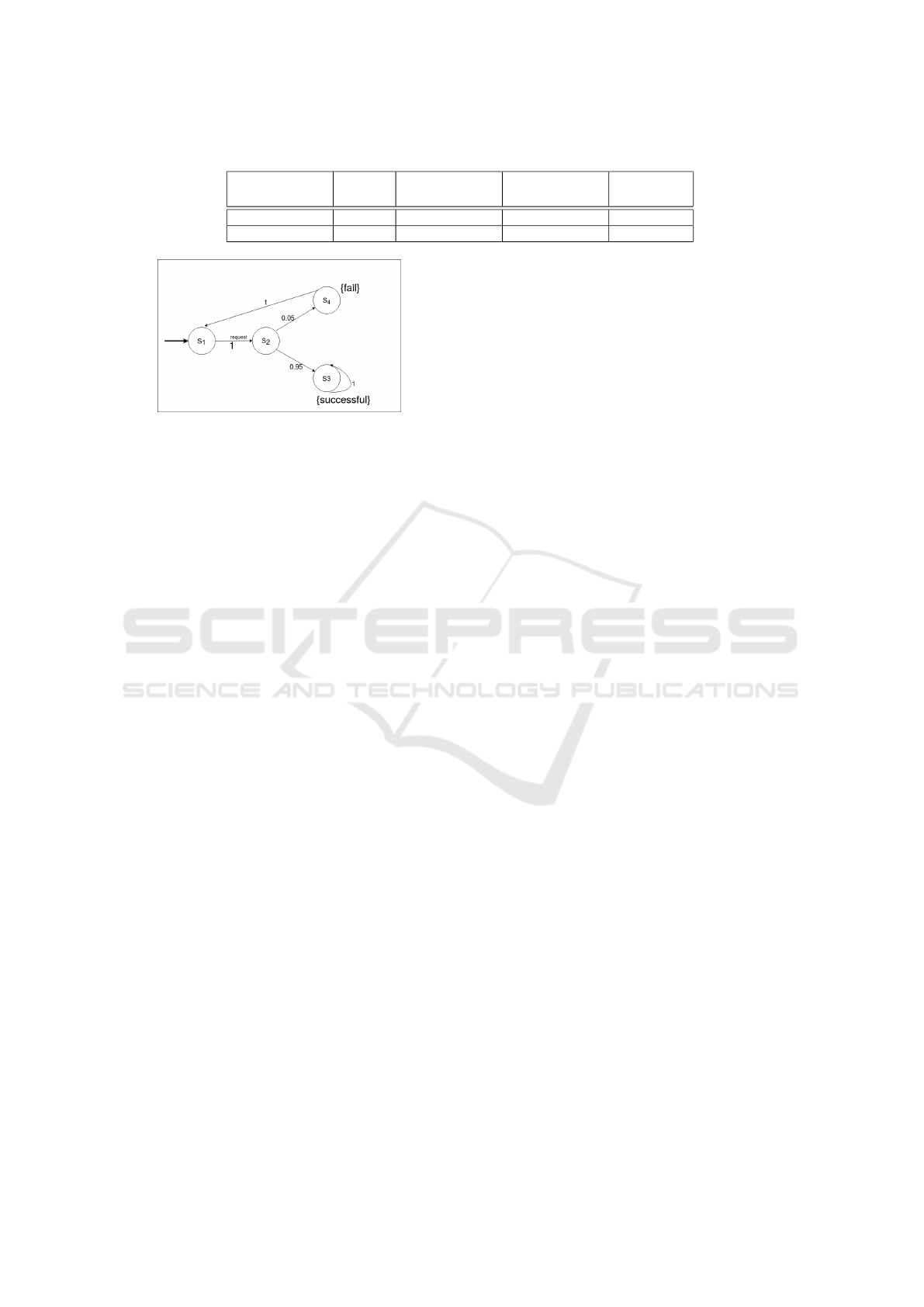
Table 6: Results for the Online Shopping problem. Number of runs: 2335. The query evaluation time is measured in seconds.
Number of
Agents
Sample
Size
Pr
=?
(K
c
(
X(Success)))
K
c
(Pr
≥0.9
(
X(Success))
Time (in
seconds)
3 1 0.943 true 0.328
3 2 0.917 true 0.378
Figure 1: DTMC model of online shopping.
Figure 1 illustrates a DTMC model of this system.
The customer’s local state is S
1
, and the server’s state
is S
2
. The environment agent’s states are {S
3
,S
4
}, re-
sulting in global states {S
1
,S
2
,S
3
,S
4
}. We ask the fol-
lowing query: “when a customer places an order, she
knows that at least 90% of the items will be shipped
successfully”: K
c
(Pr
≥0.9
(X(Success f ul))). Table 6
shows the result of this query. These results are con-
sistent with those reported by Wan et al (Wan et al.,
2013).
5 RELATED WORK
Several variants of Interpreted Systems and ETLs
have been been proposed, along with the necessary
model checking algorithms. Much of early model
checking efforts for MAS was in the context of non-
deterministic systems (Lomuscio et al., 2003; Lo-
muscio and Raimondi, 2006; Kong and Lomuscio,
2017). Indeed, excellent tools like MCMAS (Model
Checker for Multi-Agent Systems) have been devel-
oped that implement these model checking algorithms
for MAS (Lomuscio et al., 2017).
However, as in the case of reactive systems, it
is desirable to do a quantitative analysis in the case
of Stochastic MAS (SMAS). A rich theory of proba-
bilistic model checking exists for analyzing stochas-
tic reactive systems. Discrete (and continuous) Time
Markov Chains (DTMCs) are popular examples of
modeling formalisms for such systems. Temporal
logics enhanced with the probability operator like
PCTL are good examples of query languages (Hans-
son and Jonsson, 1994). To fill the gap for stochastic
MAS, stochastic versions of Interpreted Systems and
also epistemic temporal logics were introduced (Wan
et al., 2013; Delgado and Benevides, 2009; Huang
and Luo, 2013; Fu et al., 2018). Often, the Interpreted
System is modeled by some variant or a composition
of Markov chains (Wan et al., 2013). While compo-
sition do introduce an element of non-determinism,
as in the case of Markov Decision Processes, it was
still amenable to quantitative model checking (Del-
gado and Benevides, 2009). The model checking al-
gorithm, for say K-PCTL (PCTL augmented with the
knowledge operator), has a time complexity that is
polynomial in the size of the model and the epistemic
temporal logic formula (Wan et al., 2013; Fu et al.,
2018).
6 CONCLUSIONS AND FUTURE
DIRECTIONS
In this work, we discussed a statistical model check-
ing approach for answering queries in the probabilis-
tic epistemic temporal logic K-PCTL(B). We focused
on the estimation problem, whereas qualitative ques-
tions that make use of statistical methods like hypoth-
esis testing have also been discussed extensively in
the context of probabilistic temporal logics. Adapt-
ing these techniques to answer K-PCTK(B) queries
would be a natural next step.
Further, we propose to construct a user friendly
tool for nested queries involving epistemic and tem-
poral operators, on the lines of MCMAS (Lomuscio
et al., 2017) and Uppaal-SMC (David et al., 2015).
Empirical evaluation of the tool against large systems
and complex queries that involve several knowledge
and temporal operators would yield interesting in-
sights to model checking stochastic MASs. Extension
of this technique to other modalities that have practi-
cal applications would also be an interesting future
direction.
The approach discussed in this paper is particu-
larly conducive for large systems with many agents,
but a small loss in accuracy in answering the queries is
tolerable. Many MASs display this characteristic. A
practical direction is to explore such applications. We
used a simple epidemic propagation model to demon-
strate the ES algorithm, but extending it to realistic
spread models is an example of such a practical direc-
tion. Other applications could arise from the domain
of robotics (motion planning), IoT etc.
ICAART 2022 - 14th International Conference on Agents and Artificial Intelligence
62

REFERENCES
Agha, G. and Palmskog, K. (2018). A survey of statistical
model checking. ACM Transactions on Modeling and
Computer Simulation (TOMACS), 28(1):6.
Baier, C. and Katoen, J.-P. (2008). Principles of Model
Checking (Representation and Mind Series). The MIT
Press.
Ben-Ari, M., Manna, Z., and Pnueli, A. (1981). The tempo-
ral logic of branching time. In Proceedings of the 8th
ACM SIGPLAN-SIGACT Symposium on Principles of
Programming Languages, POPL ’81, page 164–176,
New York, NY, USA. Association for Computing Ma-
chinery.
David, A., Larsen, K. G., Legay, A., Miku
ˇ
cionis, M., and
Poulsen, D. B. (2015). Uppaal SMC tutorial. In-
ternational Journal on Software Tools for Technology
Transfer, 17(4):397–415.
Delgado, C. and Benevides, M. (2009). Verification of
epistemic properties in probabilistic multi-agent sys-
tems. In Multiagent System Technologies, pages 16–
28, Berlin, Heidelberg. Springer Berlin Heidelberg.
Fagin, R., Halpern, J. Y., Moses, Y., and Vardi, M. Y.
(2003). Reasoning About Knowledge. MIT Press,
Cambridge, MA, USA.
Fu, C., Turrini, A., Huang, X., Song, L., Feng, Y., and
Zhang, L. (2018). Model checking probabilistic epis-
temic logic for probabilistic multiagent systems. In
Lang, J., editor, Proceedings of the Twenty-Seventh In-
ternational Joint Conference on Artificial Intelligence,
IJCAI 2018, July 13-19, 2018, Stockholm, Sweden,
pages 4757–4763. ijcai.org.
Hansson, H. and Jonsson, B. (1994). A logic for reasoning
about time and reliability. Formal Aspects of Comput-
ing, 6(5):512–535.
Herd, B., Miles, S., McBurney, P., and Luck, M.
(2015a). Mc
2
mabs: A Monte Carlo model checker for
multiagent-based simulations. In Multi-Agent-Based
Simulation XVI - International Workshop, MABS
2015, Istanbul, Turkey, May 5, 2015, Revised Selected
Papers, pages 37–54.
Herd, B., Miles, S., McBurney, P., and Luck, M. (2015b).
Quantitative analysis of multiagent systems through
statistical model checking. In Engineering Multi-
Agent Systems - Third International Workshop, EMAS
2015, Istanbul, Turkey, May 5, 2015, Revised, Se-
lected, and Invited Papers, pages 109–130.
Huang, X. and Luo, C. (2013). A logic of probabilis-
tic knowledge and strategy. In International confer-
ence on Autonomous Agents and Multi-Agent Systems,
AAMAS ’13, Saint Paul, MN, USA, May 6-10, 2013,
pages 845–852.
Kaufmann, S., Condoravdi, C., and Harizanov, V. (2008).
Formal approaches to modality, pages 71–106. De
Gruyter Mouton Publishers.
Kermack, W. O. and McKendrick, A. G. (1927). A contri-
bution to the mathematical theory of epidemics. Pro-
ceedings of the Royal Society of London. Series A,
Containing Papers of a Mathematical and Physical
Character, 115(772):700–721.
Kong, J. and Lomuscio, A. (2017). Symbolic model check-
ing multi-agent systems against CTL*K specifica-
tions. In Proceedings of the 16th Conference on Au-
tonomous Agents and MultiAgent Systems, AAMAS
2017, S
˜
ao Paulo, Brazil, May 8-12, 2017, pages 114–
122. ACM.
Legay, A., Delahaye, B., and Bensalem, S. (2010). Sta-
tistical model checking: An overview. In Barringer,
H., Falcone, Y., Finkbeiner, B., Havelund, K., Lee, I.,
Pace, G., Ros¸u, G., Sokolsky, O., and Tillmann, N.,
editors, Runtime Verification, pages 122–135, Berlin,
Heidelberg. Springer Berlin Heidelberg.
Lomuscio, A., Qu, H., and Raimondi, F. (2017). MC-
MAS: an open-source model checker for the verifica-
tion of multi-agent systems. Int. J. Softw. Tools Tech-
nol. Transf., 19(1):9–30.
Lomuscio, A. and Raimondi, F. (2006). The complexity of
model checking concurrent programs against CTLK
specifications. In 5th International Joint Conference
on Autonomous Agents and Multiagent Systems (AA-
MAS 2006), Hakodate, Japan, May 8-12, 2006, pages
548–550. ACM.
Lomuscio, A., Raimondi, F., and Sergot, M. J. (2003).
Towards model checking interpreted systems. In
The Second International Joint Conference on Au-
tonomous Agents & Multiagent Systems, AAMAS
2003, July 14-18, 2003, Melbourne, Victoria, Aus-
tralia, Proceedings, pages 1054–1055. ACM.
Nimal, V. (2010). Statistical approaches for probabilistic
model checking. PhD thesis, University of Oxford.
Pnueli, A. (1977). The temporal logic of programs. In 18th
Annual Symposium on Foundations of Computer Sci-
ence (SFCS 1977), pages 46–57.
Vardi, M. Y. (1996). An automata-theoretic approach to
linear temporal logic, pages 238–266. Springer Berlin
Heidelberg, Berlin, Heidelberg.
Wan, W., Bentahar, J., and Ben Hamza, A. (2013). Model
checking epistemic–probabilistic logic using proba-
bilistic interpreted systems. Knowledge-Based Sys-
tems, 50:279–295.
Younes, H. L., Clarke, E. M., and Zuliani, P. (2010). Statis-
tical verification of probabilistic properties with un-
bounded until. In Brazilian Symposium on Formal
Methods, pages 144–160. Springer.
Younes, H. L. S., Kwiatkowska, M. Z., Norman, G., and
Parker, D. (2004). Numerical vs. statistical probabilis-
tic model checking: An empirical study. In Tools and
Algorithms for the Construction and Analysis of Sys-
tems, 10th Intl. Conf., TACAS 2004, Barcelona, Spain,
March 29 - April 2, 2004, Proc., pages 46–60.
Statistical Model Checking for Probabilistic Temporal Epistemic Logics
63
